Актуаторы
Вы находитесь здесь: Главная / CEDRAT TECHNOLOGIES / Технологии / Актуаторы / Пьезодвигатели и электроника
Пьезо двигатели – это двигатели линейного перемещения и вращения, обеспечивающие высокую точность и режим удержания в выключенном состоянии. Характеристики этих двигателей делают их подходящими для задач микро позиционирования при большой величине хода.
Специалисты CEDRAT TECHNOLOGIES испытывали различные типы пьезоэлектрических двигателей модернизируя/испытывая стандартные пьезодвигатели и разрабатывая собственные оригинальные концепты для применения в космосе и высокоточном приборостроении:
Червячные пьезо двигатели (Inchworm): Эти двигатели основаны на квази-статических шагах пьезо статора. Они предлагают обеспечивают хорошую управляемость, но их скорость невысока (< 10мм/с) и они являются многофазными и как следствие дорогими. Компания CEDRAT TECHNOLOGIES имеет опыт разработки таких двигателей.
Ультразвуковые двигатели (Ultrasonic motor -USM): Эти двигатели используют эффект ультразвуковой вибрации (обычно эллиптическая с применением резонанса) статора, который перемещает контактную часть (такую как ротор). Они быстрые (> 100 мм/с), но обеспечивают средний уровень управляемости и являются чувствительными к вибрации нагрузки и окружающей среды. Так как приходится отслеживать резонанс, то их электроника также может быть сравнительно сложной. Космически квалифицированный Линейный Пьезо двигатель LPM20-3 от компании CEDRAT TECHNOLOGIES – это мультирежимный ультразвуковой двигатель (MMUM). Он применим для работы в вакууме и является космически квалифицированным благодаря проектам Французского Космического агентства и EADS. На основе этого концепта компанией CEDRAT TECHNOLOGIES также были разработаны пьезоэлектрические двигатели вращения, такие как RPA для Европейского Космического Агентства и магнитострикционные двигатели вращения, обеспечивающие большой момент на малой скорости.
Инерционные Шаговые Двигатели (Inertial Stepping Motor -ISM): Эти двигатели также называются Плавными (Smooth) Динамически Приводными Механизмами (Impact Drive Mechanisms — IDM или SIDM) и основаны на последовательных шагах пьезо статора, который осуществляет движение. Они обеспечивают средние скорости (10-50 мм/с). Эти двигатели требуют только один пакет пьезокерамики и один канал управляющей электроники, что ведет к хорошему потенциалу миниатюризации. Компания CEDRAT TECHNOLOGIES разработала Шаговые Пьезо актуаторы (Stepping Piezo Actuator – SPA), новые пьезо двигатели на основе концепта ISM, с применением преимуществ APA®.
Приведенные далее примеры демонстрируют множество прототипов и изделий по спецификации заказчика. Для получения более подробной информации Вы можете воспользоваться публикациями, посвященными Пьезо двигателям вращения и линейным пьезо двигателям.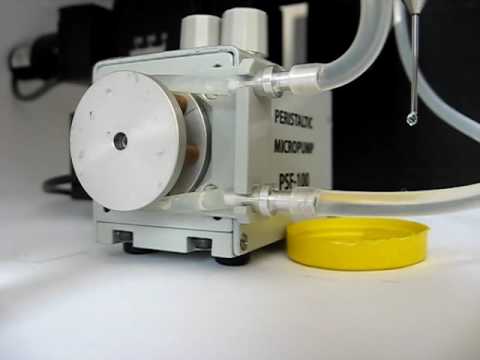 Для удобства разработчиков доступен набор разработчика на основе SPA30uXS.
Для удобства разработчиков доступен набор разработчика на основе SPA30uXS.
| Трипод на основе пьезо двигателей Tripod Actuator (TRAC) по спецификации заказчика | |||||
| Описание: |
Трипод на основе пьезо двигателей Tripod Actuator (TRAC) является механизмом с 3-мя степенями свободы и позволяет реализовывать угловой ход в диапазоне +/- 35 ° вокруг X и Y осей и 10 мм ход вдоль оси Z при малых габаритах, составляющих Ø50 x 50мм. |
||||
| Области применения: |
Нано позиционирование, Блокирование, Перефокусировка, Пьезо Клапана, Микро Роботы … |
||||
| Статус: | Прототип | ||||
| Линейный Шаговый Пьезо Актуатор (Linear Stepping Piezo Actuator — LSPA) LSPA30uXS | |||||
| Описание: | Шаговый Пьезо Актуатор LSPA30uXS является новым немагнитным шаговым линейным микродвигателем с высокой плотностью энергии. |
||||
| Области применения: | Встраиваемые миниатюрные системы, камеры, МРТ, миниатюрные клапаны, медицинские импланты | ||||
| Статус: | Стандарный | ||||
| Силовой Шаговый Пьезо Аткуатор: FSPA | |||||
| Описание: |
FSPA – это новый линейный шаговый пьезо актуатор с большой величиной хода для задач нано позиционирования. FSPA обеспечивает намного большие силы, чем SPA, но при намного меньшей скорости. |
||||
| Области применения: |
Микро/Нано позиционирование, Блокирующие механизмы. |
||||
| Статус: | Прототип | ||||
 ..
..
| Пьезо Актуатор Вращения (Rotary Piezo Actuator – RPA) | |||||
| Описание: |
RPA – это Резонансный Ультразвуковой Пьезоэлектрический Двигатель Вращения разработанный для космических применений (соединение роботизированных рук, приведение в действие инструментов). |
||||
| Области применения: |
Авиакосмическая отрасль, роботизированная рука, Высокоточное позиционирование… |
||||
| Статус: |
Космически квалифицированный |
||||
| Модернизированный Пьезо Двигатель | |||||
| Описание: |
CEDRAT TECHNOLOGIES доработал имеющиеся на рынке серийные пьезоэлектрические двигатели вращения путем замены нескольких частей и проведения соответствующих тестов. |
||||
| Области применения: |
Авиакосмическая отрасль, оборонная промышленность, немагнитные инструменты |
||||
| Статус: | Прототип | ||||
 Например, двигатели TWUM были модифицированы для применения в космосе.
Например, двигатели TWUM были модифицированы для применения в космосе.
| Пьезо Двигатель Вращения (Rotary Piezo Motor) RPMHPP | |||||
| Описание: |
RPMHPP – это Квази-статический шаговый Пьезоэлектрический Двигатель Вращения для применения в космическом телескопе. Он обладает основными преимущества пьезо двигателей при возможности обеспечить особо высокое угловое разрешение в широком температурном диапазоне. |
||||
| Области применения: |
Авиакосмическая отрасль, Высокоточное угловое позиционирование, телескопы. |
||||
| Статус: | Космически квалифицированный | ||||
| Линейный Пьезо Двигатель (Linear Piezo Motor) LPM20-3 | |||||
| Описание: |
LPM20-3 – это Ультразвуковой Линейный Пьезоэлектрический Двигатель, разработанный для космических применений при поддержке Французского Космического Агентства. Он обеспечивает большие силы (20-50Н) и скорость (20 мм/c) при очень низкой электрической мощности (12 Вт). |
||||
| Области применения: |
Авиакосмическая отрасль, Перефокусировка, Высокая точность позиционирования… |
||||
| Статус: | Космически квалифицированный | ||||
ультразвуковой двигатель ქართულად | ტექნიკური ლექსიკონი
— ყველა დარგი -ავიაციაამფიბიოლოგიაანატომიაარქიტექტურაბაქტერიოლოგიაბიოტექნოლოგიაბიოქიმიაბოტანიკაგენეტიკაევოლუციაეკოლოგიაელექტროტექნიკაელექტროქიმიაემბრიოლოგიაენტომოლოგიავირუსოლოგიაზოოლოგიაიმუნოლოგიაისტორიულიიქთიოლოგიაკომპიუტერულიკოსმოსი, კოსმოსური ტექნოლოგიებ. ..მათემატიკამამალიოლოგიამედიცინამეტალურგიამეტეოროლოგიამიკოლოგიამიკრობიოლოგიამოლეკულური ბიოლოგიაოპტიკაორნითოლოგიაპალეონტოლოგიარადიოტექნიკარეაქტიული ტექნიკარეპტილიებირკინიგზასაავტომობილო ელექტროტექნიკასაავტომობილოსაგზაოსაზღვაოსამთამადნო საქმესამშენებლო საქმესამშენებლო-საავტომობილოსატესტოსოფლის მეურნეობასპეციალური/მრავალდარგობრივი ტე…ტელევიზიატელეკომუნიკაციატექნიკურიუპირატესად ავიაციაუპირატესად ეკოლოგიაუპირატესად ელექტროტექნიკაუპირატესად კომპიუტერულიუპირატესად მათემატიკაუპირატესად მეტალურგიაუპირატესად ოპტიკაუპირატესად რადიოტექნიკაუპირატესად რკინიგზაუპირატესად საავტომობილოუპირატესად საზღვაოუპირატესად სამშენებლოუპირატესად ტელეკომუნიკაციაუპირატესად ქიმიაუპირატესად შიგაწვის ძრავაფეხსახსრიანებიფიზიკაფიზიოლოგიაფოტოგრაფიაქიმიაშიგაწვის ძრავაციტოლოგიაჰელმინთოლოგიაჰიდროლოგია ან ჰიდროტექნიკაჰისტოლოგია
..მათემატიკამამალიოლოგიამედიცინამეტალურგიამეტეოროლოგიამიკოლოგიამიკრობიოლოგიამოლეკულური ბიოლოგიაოპტიკაორნითოლოგიაპალეონტოლოგიარადიოტექნიკარეაქტიული ტექნიკარეპტილიებირკინიგზასაავტომობილო ელექტროტექნიკასაავტომობილოსაგზაოსაზღვაოსამთამადნო საქმესამშენებლო საქმესამშენებლო-საავტომობილოსატესტოსოფლის მეურნეობასპეციალური/მრავალდარგობრივი ტე…ტელევიზიატელეკომუნიკაციატექნიკურიუპირატესად ავიაციაუპირატესად ეკოლოგიაუპირატესად ელექტროტექნიკაუპირატესად კომპიუტერულიუპირატესად მათემატიკაუპირატესად მეტალურგიაუპირატესად ოპტიკაუპირატესად რადიოტექნიკაუპირატესად რკინიგზაუპირატესად საავტომობილოუპირატესად საზღვაოუპირატესად სამშენებლოუპირატესად ტელეკომუნიკაციაუპირატესად ქიმიაუპირატესად შიგაწვის ძრავაფეხსახსრიანებიფიზიკაფიზიოლოგიაფოტოგრაფიაქიმიაშიგაწვის ძრავაციტოლოგიაჰელმინთოლოგიაჰიდროლოგია ან ჰიდროტექნიკაჰისტოლოგია# a b c d e f g h i j k l m n o p q r s t u v w x y z
დაკავშირებული სიტყვები
სინონიმები
ультразвуковой электродвигатель
მეზობელი სიტყვები
ультразвукультразвуковая очисткаультразвуковая резкаультразвуковая сваркаультразвуковое сверление
ультразвуковой двигатель
ультразвуковой толщиномерультразвуковой электродвигательультранизкая частотауменьшающий переходникумеренно доступный
შესაძლოა ასევე გაინტერესებდეთ
аксиальный двигательасинхронный двигательасинхронный двигатель с «беличьей клеткой»атмосферный двигательбензиновый двигательбиполярный двигательверхнеклапанный двигательгазовый двигательгазотурбинный двигательдвигательдвигатель без наддувадвигатель Ванкелядвигатель вентилятора радиаторадвигатель внешнего сгораниядвигатель внутреннего сгораниядвигатель задней установкидвигатель с водяным охлаждениемдвигатель с воздушным охлаждениемдвигатель с воспламенением от сжатиядвигатель сгораниядвигатель с жидкостным охлаждениемдвигатель с искровым зажиганиемдвигатель с наддувомдвигатель со смешанным расположением клапановдвигатель с расщеплённой фазойдвигатель с турбонаддувомдвигатель с экранированными полюсамидвухконтурный турбовентиляторный двигательдвухполюсный двигательдвухтопливный двигательдезаксиальный двигательдизельный двигательдизельный двигатель с турбонаддувомдлинноходный двигательзвёздообразный двигателькарбюраторный двигательквадратный двигательконденсаторный двигателькороткозамкнутый асинхронный двигателькороткоходный двигательмноготопливный двигательмногоцилиндровый двигательнижнеклапанный двигательодноцилиндровый двигательоппозитный двигательосевой двигательпаровой двигательпневматический двигательпоперечно расположенный двигательпоршневой двигательпоршневой двигатель внутреннего сгоранияпредкамерный дизельный двигательпродольно расположенный двигательпульсирующий воздушно-реактивный двигательракетный двигательреактивный двигательреверсивный двигательротационный двигательроторно-поршневой двигательроторный двигательсвободнопоршневой двигательсинхронный двигательтепловой двигательтурбинный двигательтурбовальный двигательтурбовентиляторный двигательтурбовентиляторный реактивный двигательтурбовинтовой двигательтурбореактивный двигательтяговый двигательультразвуковой толщиномерультразвуковой электродвигательшаговый двигательэлектрический двигательэлектродуговой двигательэлектродуговой реактивный двигатель
არსებითი სახელი
ინგლისურად | ქართულად
ელექტრ. ულტრაბგერითი ელექტროძრავა, ულტრაბგერითი ძრავა
ულტრაბგერითი ელექტროძრავა, ულტრაბგერითი ძრავა
class=footer>
class=wrapper>Возможности позиционирования ультразвуковых двигателей
XY-микроскопический столик U-780 PILine/M-687 с ультразвуковым линейным двигателем (слева) рядом с миниатюрным трансляционным столиком M-663 PILine® с ультразвуковым линейным двигателем (справа) (изображения: PI)1. Обзор
В то время как обычные системы позиционирования преобразуют вращательное движение двигателя в поступательное движение с помощью шпинделя, системы позиционирования PILine® основаны на специальном прямом приводе. Это полностью устраняет люфт и люфт, а также увеличивает время отклика и точность позиционирования. Кроме того, они обеспечивают позиционирование с высоким разрешением и высокую производительность.
(слева) Сердце ультразвукового двигателя. Различные размеры привода для линейного и вращательного движения. (справа) Посмотрите видео «Прецизионное управление движением с помощью ультразвуковых пьезодвигателей»
(справа) Посмотрите видео «Прецизионное управление движением с помощью ультразвуковых пьезодвигателей»В то же время сверхмедленное движение может быть реализовано с постоянными скоростями вплоть до нескольких нм в секунду. В этом техническом документе основное внимание уделяется обзору возможностей и показано, как максимально эффективно использовать линейные каскады PILine® специально для вашего приложения.
2. Принцип работы систем позиционирования PILine®
Системы позиционирования PILine® основаны на ультразвуковых пьезодвигателях, способных к линейному перемещению с прямым приводом. Пьезоэлектрический привод прижимается к бегунку с помощью соединительного элемента (см. рис. 1).
Рис. 1. Схема двигателя PILine®: пьезоэлектрический привод предварительно нагружен на бегунок. Электрическое возбуждение привода вызывает колебания. Это колебание преобразуется в поступательное движение, которое затем передается на бегунок с помощью соединительного элемента. Положение бегунка регистрируется стационарным датчиком (энкодером), который подсчитывает периоды решетки, прикрепленной к бегунку (Изображение: PI)
Положение бегунка регистрируется стационарным датчиком (энкодером), который подсчитывает периоды решетки, прикрепленной к бегунку (Изображение: PI)Электрическое возбуждение пьезоэлектрического привода на его резонансной частоте1 вызывает колебания. Из-за предварительного натяга колебания привода преобразуются в непрерывное движение подачи соединительным элементом, который перемещает бегунок.
Предварительная нагрузка также приводит к самоблокировке привода в состоянии покоя. Скорость движения можно регулировать, изменяя амплитуду возбуждения и, следовательно, количество энергии, передаваемой бегуну.
Изменения положения столика точно обнаруживаются инкрементным или, в некоторых случаях, абсолютным датчиком линейных перемещений. Количество отсчетов, записанных энкодером, пропорционально пройденному расстоянию. Субнанометровое разрешение возможно благодаря использованию современных датчиков и решеток.
Обратите внимание, что для точного воспроизведения разрешения датчика двигатель должен работать в режиме обратной связи.
Прямое измерение скорости с помощью этого метода невозможно. Однако, измеряя время ΔT = T 2 — T 1 Требуется для прохождения расстояния ΔS = S 2 — S 1 , Velocity может быть получена. из соотношения v = Δs / Δt.
Имейте в виду, что расстояние Δs варьируется в зависимости от используемой частоты дискретизации 1/Δt, поэтому для постоянства скорости получаются разные результаты (= v фактическая / v заданная – 1) , несмотря на одинаковое движение столика (см. рис. 2).
Рис. 2. Постоянство скорости в зависимости от положения; записано несколько раз с двумя разными частотами дискретизации. Небольшие локальные изменения скорости имеют значительно большее влияние при высокой частоте дискретизации (Изображение: PI) В зависимости от конкретной области применения заказчик может быть заинтересован в том, чтобы этап достиг цели назначения как можно быстрее (за счет точности) или как можно точнее (с оговорками по требуемому времени). Оба требования подробно рассматриваются в следующих главах.
Оба требования подробно рассматриваются в следующих главах.
2.1 Стабильность: принцип самозажима
Скорость и разрешение — не единственные критерии для приложений точного управления движением. Благодаря предварительному натягу и принципу привода керамика/керамика ультразвуковой двигатель действует как тормоз, когда он не находится под напряжением. Эта функция имеет решающее значение для приложений, где важна долговременная стабильность, например, в микроскопии сверхвысокого разрешения и визуализации. Испытания с ультразвуковыми двигателями в установке оптического захвата показывают значительно лучшую стабильность, чем столики с винтовым приводом, особенно в течение длительных периодов времени.
Более подробная информация доступна в документе ниже.
Приводы и критерии проектирования для позиционирования с нанометровым разрешением и стабильностью Учить больше3.
 Быстрое позиционирование
Быстрое позиционированиеПри наведении на положение встроенный генератор профиля контроллера PILine® (например, C-867) создает профиль скорости для двигателя, который состоит из трех областей (см. рис. 3): (A) ускорение, (B) постоянная скорость и (C) замедление и стабилизация.
Рис. 3 Пример профиля положения и скорости, созданного контроллером PILine®. Его можно разделить на три области: ускорение (A), постоянная скорость (B) и замедление и стабилизация (C) (Изображение: PI)Каждый из этих регионов можно настроить индивидуально, отрегулировав соответствующие параметры контроллера. Для лучшего понимания принципы сервоалгоритма будут объяснены перед обсуждением отдельных параметров далее в этой главе.
Ступени PILine® обычно работают в режиме с обратной связью, где для компенсации отклонений траектории используется пропорционально-интегрально-дифференциальный (ПИД) алгоритм. Сравнение фактического положения (полученного от датчика) с заданным положением возвращает следующую ошибку , которая служит переменной процесса для алгоритма PID. Используя постоянные пропорциональные , интегральные и производные ПИД-члены, выходной сигнал контроллера регулируется в попытке минимизировать следующая ошибка.
Используя постоянные пропорциональные , интегральные и производные ПИД-члены, выходной сигнал контроллера регулируется в попытке минимизировать следующая ошибка.
Контроллер имеет до пяти независимых наборов ПИД-параметров (набор от 0 до 4). Как показано на рис. 4, эти наборы PID расположены концентрически вокруг заданного положения или вокруг целевого положения (по умолчанию), в зависимости от стратегии изменения окна (параметр 0x4D ).
Пропорциональный, интегральный и производный параметры должны уменьшаться с увеличением номера набора PID. Количество используемых наборов параметров можно настроить с помощью параметра 0x400. Рекомендуется работать с тремя комплектами. Каждый набор параметров PID содержит два окна: окно ввода и окно выхода, указание области активации.
Рис. 4 Окна входа и выхода конфигурации с тремя наборами PID представлены разными цветами. Окна могут быть центрированы вокруг заданного положения (a) или вокруг целевого положения (b; настройка по умолчанию). Самый внутренний набор PID (0, зеленый) активируется только после начала установления; т. е. когда заданное положение равно заданному положению. Обратите внимание, что в (b) самый внешний набор PID (2, красный) уже активен до того, как фактическое положение ступени достигнет соответствующего окна ввода (Изображение: PI)
Окна могут быть центрированы вокруг заданного положения (a) или вокруг целевого положения (b; настройка по умолчанию). Самый внутренний набор PID (0, зеленый) активируется только после начала установления; т. е. когда заданное положение равно заданному положению. Обратите внимание, что в (b) самый внешний набор PID (2, красный) уже активен до того, как фактическое положение ступени достигнет соответствующего окна ввода (Изображение: PI)Как только фактическое положение ступени достигает одного из окон ввода, автоматически активируется соответствующий набор PID. По определению, выход окна должен быть больше, чем вход окна , чтобы предотвратить немедленное переключение параметров обратно. Параметр выхода из окна самого внешнего набора PID игнорируется контроллером PILine®, оставляя этот набор PID активным, даже когда ступень выходит из окна.
Набор параметров ПИД-регулятора 0 ( 0x401 9от 0026 до 0x407 ) играет особую роль в регулировании установившегося режима – он активируется только после завершения заданной траектории (см. рис. 4). Другие наборы PID (от 1 до 4, 0x411 — 0x447 ) определяют поведение во время движения сцены.
рис. 4). Другие наборы PID (от 1 до 4, 0x411 — 0x447 ) определяют поведение во время движения сцены.
3.1 Область A: Ускорение
В этой области ступень ускоряется до достижения максимальной скорости, заданной генератором профиля.
Область ускорения можно уменьшить на 9
В качестве быстрой и простой первой меры попробуйте увеличить ускорение двигателя (0xB), , для которого по умолчанию установлено довольно консервативное значение (см. рис. 5).
Рис. 5 Время позиционирования можно сократить, используя более высокие значения ускорения. Пунктирные линии обозначают время установления образцового линейного столика PILine® (Изображение: PI)Обратите внимание, что более высокое ускорение может сократить срок службы продукта.
Обязательно контролируйте выход двигателя контроллера c : в нормальных условиях двигатель должен работать с выходом двигателя примерно 50 % параметра максимальной выходной мощности двигателя (0x9). Верхние 20 % от мощности двигателя предназначены для управления резервом. По этой причине, v oid работает выше выходной мощности двигателя значение 80%, чтобы избежать повреждения двигателя.
Верхние 20 % от мощности двигателя предназначены для управления резервом. По этой причине, v oid работает выше выходной мощности двигателя значение 80%, чтобы избежать повреждения двигателя.
Второй способ сокращения области разгона заключается в настройке параметров напряжения смещения контроллера. Прежде чем сцена сможет начать движение, необходимо устранить трение между соединительным элементом и бегунком. Для этого контроллер постепенно увеличивает мощность двигателя. Время задержки, связанное с этим процессом, можно уменьшить, увеличив параметр (0x48), смещения привода , который устанавливает начальное значение выходного напряжения двигателя (см. рис. 6).
Рис. 6. Регулировка параметра смещения привода уменьшает время задержки перед пуском (указано стрелками), вызванное первоначальным заеданием между соединительным элементом и рабочим колесом (Изображение: PI) Кроме того, компенсация нагрузки столика в зависимости от направления (например, при вертикальной установке) достигается за счет настройки параметров положительное смещение двигателя (0x33) и отрицательное смещение двигателя (0x34). Эти смещения применяются вместе со смещением электропривода . Подходящие начальные значения можно найти и установить с помощью следующего макроса хоста в PIMikroMove:
Эти смещения применяются вместе со смещением электропривода . Подходящие начальные значения можно найти и установить с помощью следующего макроса хоста в PIMikroMove:
3.2 Область B: Постоянная скорость
В этой области ступень достигла постоянной максимальной скорости.
Область постоянной скорости можно уменьшить, увеличив st возрастную скорость (параметр 0x49 ).
В некоторых случаях, особенно при преодолении коротких дистанций, ступень может сразу перейти от ускорения (область А) к замедлению (область С), не достигая максимальной скорости. Если да, попробуйте увеличить ускорение (0xB) и замедление (0xC) параметры.
Если да, попробуйте увеличить ускорение (0xB) и замедление (0xC) параметры.
3.3 Область C: Замедление и стабилизация
В этой области двигатель замедляется по мере приближения к целевому положению.
Область замедления можно уменьшить,
- увеличив замедление параметр
- регулировка Интегральный термин набора PID 2
- Увеличение Окно Введите Набор PID 0
Увеличение Deceleration Параметр (0xc) — это сходство с увеличением Acceler (0xc) , сходным с увеличением Accelerer (0xc) . объясняется в главе 3.1.
Более быстрое торможение также можно получить, увеличив интегральный член второго набора PID (параметр 0x422 ). Это увеличивает скорость втягивания ступени в окно стабилизации (настройка PID 0), как показано на рис. 8.
8.
Если точность не имеет первостепенного значения, введите в окно параметр ПИД-регулятора, установленный на 0 (называемый «окном установления», (0x406) можно расширить для достижения более раннего установления, как показано на рис. 9.
Рис. 9. Увеличение области осаждения на рис. 4. Окно стабилизации по умолчанию (a) по сравнению с увеличенным окном стабилизации (b), что приводит к более раннему осаждению (обозначения см. на рис. 4) (Изображение: PI)4. Точное позиционирование
Когда требуется особенно точное позиционирование, необходимо учитывать оговорки по скорости позиционирования. Более высокая точность может быть достигнута при использовании меньшего окна стабилизации; т. е. путем уменьшения окна введите 0 (0x406) и окна выхода 0 (0x407) параметров.
Достижимая точность позиционирования ограничена периодом деления шкалы, точностью датчика и интерполяционным коэффициентом электроники датчика. Для более высокой точности рассмотрите приобретение:
Для более высокой точности рассмотрите приобретение:
- st Возраст с более мелкими периодами решетки
- c Контроллеры с внутренней интерполяцией
Используемые периоды решетки составляют от нескольких до нескольких десятков микрометров. С помощью двух фотодиодов с фазовым сдвигом 90° генерируются два синусоидальных сигнала, что позволяет определять направление движения. Затем эти сигналы обрабатываются схемой интерполяции, которая разбивает каждый период на несколько равноотстоящих импульсов. Окончательное разрешение соответствует периоду решетки, деленному на коэффициент интерполяции.
Окончательное разрешение соответствует периоду решетки, деленному на коэффициент интерполяции.
При использовании столика PILine® с современным датчиком PIOne (PI Optical Nano Encoder) с периодом сигнала датчика 0,5 мкм и коэффициентом интерполяции >1000 можно достичь разрешения субнм.
Обычно интерполяторы с коэффициентами интерполяции от 256 до 8192 интегрируются непосредственно в электронику столика. Некоторые каскады PILine® имеют переключатель для обхода этого встроенного интерполятора. В этом случае выходной сигнал изменяется с внутренних интерполированных отсчетов A/B на необработанные синусоидальные/косинусоидальные сигналы, которые могут быть дополнительно обработаны внешним интерполятором.
Новый контроллер PILine® C-867.1U оснащен встроенным интерполятором с коэффициентом интерполяции до 20 000, что позволяет многократно увеличить разрешение существующих каскадов. Приложения, требующие точного позиционирования, а также очень медленного движения, выигрывают от этого увеличения разрешения (см. рис. 10).
рис. 10).
5. Управляемое позиционирование с приоритетом на траектории
Двигатели PILine® имеют широкий динамический диапазон скоростей от 10 нм/с до > 100 мм/с, который можно разделить на три характерных диапазона:
- Ультрамедленное движение (от 10 нм/с до 10 мкм/с)
- Медленное движение (от 10 мкм/с до 1 мм/с)
- F Быстрое движение (> 100 мм/с2)
Особенности и проблемы каждого из этих диапазонов скоростей будут обсуждаться в следующих подразделах.
5.1 Сверхмедленное движение (от 10 нм/с до 10 мкм/с)
Видео: Замедленная съемка с высокостабильным пьезомоторным столиком Позиционирование на сверхнизких скоростях необходимо при сканировании мелких объектов; например, при использовании микроскопа с столиком PILine® в ручном режиме. Настройка параметров ПИД-регулятора и контроллера в соответствии с предполагаемым использованием является обязательной для достижения оптимальной производительности каскада.
Настройка параметров ПИД-регулятора и контроллера в соответствии с предполагаемым использованием является обязательной для достижения оптимальной производительности каскада.
Ключевым требованием для этого диапазона скоростей является равномерное движение. Для этой цели некоторые контроллеры PILine® (например, C-687.262) предлагают так называемое включение второй фазы. В этом режиме неиспользуемый электрод двигателя приводится в действие вторичным выходным каскадом; амплитуду можно установить с помощью смещение двигателя параметр (0x6F). Это приведет к корректировке вектора прямой подачи соединительного элемента, что уменьшит пусковой момент.
С другой стороны, в этом режиме поступательное усилие уменьшается. Наилучшие результаты достигаются при использовании значений смещения двигателя от 50 % до 70 % от максимальной мощности двигателя параметра (0x9).
Ошибки рассогласования, возникающие, в частности, в этом диапазоне скоростей, должны быть компенсированы путем увеличения П-члена текущего ПИД-регулятора до очень высокого значения (см. главу 6). Если предположить, что сцена хорошо настроена, фактическая траектория может точно воспроизвести сгенерированный профиль, как показано на рис. 11.
главу 6). Если предположить, что сцена хорошо настроена, фактическая траектория может точно воспроизвести сгенерированный профиль, как показано на рис. 11.
Контроллеры PILine® также имеют схему регулирования для автоматической регулировки частоты возбуждения, которая может мешать ПИД-регулированию. Прежде чем приступить к оптимизации P-term, убедитесь, что автоматический поиск частоты (0x52) выключен. Кроме того, небольшое увеличение выходной частоты (0x51) может оказаться полезным при медленном вождении.
5.2 Замедленная съемка (от 10 мкм/с до 1 мм/с)
Типичные области применения для этого диапазона скоростей включают в себя захват изображений с запуском или лазерную резку клеток.
В этом диапазоне скоростей может возникать дребезжащий шум, создаваемый периодическим переключением режима сцепления соединительного элемента. Шум может показаться раздражающим; однако причина этого не вредна для двигателя. Его можно устранить, запустив двигатель с вторичной фазой с помощью смещение двигателя параметр (0x6F), как описано в главе 5.1. Использование вторичной фазы также снижает ошибку позиционирования, а также требуемую мощность двигателя.
5.3 Быстрое движение (>1 мм/с)
Этот диапазон скоростей в основном используется для быстрых ступенчатых приложений. Типичными вариантами использования являются позиционирование линз на пути луча или применение затвора. Здесь главное требование — быстрое и точное позиционирование; форма траектории играет второстепенную роль.
В большинстве случаев настройки контроллера по умолчанию можно принять без необходимости трудоемкой настройки. Кроме того, использование двухфазного срабатывания (смещение двигателя) не требуется и фактически может привести к более низким конечным скоростям и меньшему поступательному усилию.
6. Движение по траектории с минимальным отклонением положения
Когда требуется минимальная ошибка положения, P-составляющая активного набора параметров ПИД-регулятора должна быть скорректирована в соответствии с текущей скоростью ступени. I- и D-члены менять не нужно; однако в некоторых случаях их уменьшение может быть полезным. На рис. 12 показаны эмпирически определенные P-члены типичной ступени PILine®, для которой минимум после ошибки получается.
Рис. 12. Пример диаграммы зависимости P-члена от скорости линейного столика PILine®, построенной в логарифмическом масштабе. К вашей сцене могут применяться другие значения (Изображение: PI) Чтобы получить наименьшую возможную ошибку следования независимо от скорости, во всех поддерживаемых программных средах может быть реализована функция, настраивающая P-член на текущую скорость, например. с помощью эмпирической формулы или таблицы поиска.
Автор: Доктор Кристиан Бенц является инженером-разработчиком пьезодвигателей в компании Physik Instrumente (PI) GmbH & Co. KG.
Обзор различных принципов проектирования пьезоэлектрических двигателей
Надежность ультразвуковых двигателей
Обзор продуктов О PI
Заполните форму, чтобы получать по электронной почте новые сообщения в блогеИмя*
Фамилия*
Компания/Организация
Почтовый индекс*
Штат*
Country*Please choose…AfghanistanAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua and BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Sint Eustatius and SabaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBritish Virgin IslandsBruneiBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos (Keeling) IslandsColombiaComorosCongoCongo-BrazzavilleCook IslandsCosta RicaCroatiaCubaCuraçaoCyprusCzech RepublicCôte d’IvoireDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEswatiniEthiopiaFalkland IslandsFaroesFijiFinlandFranceFrench GuianaFrench PolynesiaFrench Southern TerritoriesGabonGambiaGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadeloupeGuamGuatemalaGuernseyGuineaGuinea -Бисау, Гайана, Гаити, остров Херд и острова Макдональд, Гондурас, Хо ng Kong SAR of ChinaHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle of ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKosovoKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacao SAR of ChinaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorth MacedoniaNorthern MarianasNorwayOmanPakistanPalauPalestinePanamaPapua New GuineaParaguayPeruPhilippinesPitcairn IslandsPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint BarthélemySaint Helena, Ascension and Tristan da CunhaSaint Kitts and NevisSaint LuciaSaint MartinSaint Pierre and MiquelonSaint Vincent and the GrenadinesSamoaSan MarinoSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth Geo rgia and the South Sandwich IslandsSouth KoreaSouth SudanSpainSri LankaSudanSurinameSvalbardSwedenSwitzerlandSyriaSão Tomé e PríncipeTaiwanTajikistanTanzaniaThailandThe BahamasTimor-LesteTogoTokelauTongaTrinidad and TobagoTunisiaTurkmenistanTurks and Caicos IslandsTuvaluTürkiyeUS Virgin IslandsUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUnited States Minor Outlying IslandsUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamWallis and FutunaWestern SaharaYemenZambiaZimbabweÅland
Электронная почта*
Перед отправкой запроса ознакомьтесь с нашей Политикой конфиденциальности здесь.
Я прочитал Политику конфиденциальности и согласен с ее условиями.
Ваш запрос обрабатывается
Не заполняйте это поле!
Ультразвуковые пьезодвигатели PILine®
- Линейное и вращательное движение
- Практически неограниченный диапазон перемещения
- Простая механическая интеграция
- Удерживающая сила до 15 Н, удерживающий момент до 0,3 Нм
- Скорость до 500 мм/с, разрешение до 2 нм
Комбинации двигатель-шпиндель преобразуют вращательное движение двигателя в поступательное движение, при этом время отклика увеличивается из-за люфта между механическими компонентами. Однако приводы, такие как PILine®, создают прямолинейное движение с большей стабильностью и меньшей инерцией.
Приводы PILine® избавляются от механической сложности классических комбинаций роторный двигатель/редуктор/шпиндель в пользу затрат и надежности. Эти компоненты могут быть очень подвержены износу, особенно в миниатюрных системах.
Неотъемлемой частью ультразвукового пьезодвигателя является пьезоактуатор, который предварительно прижимается к подвижному направляющему элементу через соединительный элемент. Пьезокерамический привод возбуждается ультразвуковыми колебаниями с высокочастотным переменным напряжением от 100 до 200 кГц. Деформация привода приводит к периодическому диагональному движению соединительного элемента относительно бегунка. Создаваемая подача составляет несколько нанометров за цикл; высокие частоты приводят к высоким скоростям.
Двигатели PILine® могут вызывать вращательное движение одним из двух способов: По аналогии с линейным движением пьезокерамические приводы действуют сбоку на кольцеобразный бегунок , создающий, таким образом, быстрое вращательное движение. Создаваемый удерживающий момент составляет примерно 0,3 Нм.
Реализация вращательного движения: двигатели PILine® воздействуют на кольцеобразную направляющую. Небольшие поворотные столики диаметром 20 мм или 30 мм используют кольцеобразный привод. Этот тип привода достигает очень высоких скоростей более двух оборотов в секунду. Удерживающий момент составляет примерно 30 мНм.
Предварительная нагрузка пьезокерамических приводов на направляющую обеспечивает самоблокировка привода в состоянии покоя и при выключенном питании. В результате он не потребляет никакой энергии, не нагревается и удерживает положение механически стабильным. Применения с низким рабочим циклом, работающие от батареи или чувствительные к теплу, выигрывают от этих характеристик.
Движение пьезокерамического привода основано на кристаллических эффектах и не подвержено износу . С другой стороны, соединение с бегунком подвержено трению. В зависимости от режима работы достигается дальность поездки более 2000 км или среднее время наработки на отказ 20 000 часов.
Пьезодвигатели от PI в принципе совместимы с вакуумом и подходят для работы в сильных магнитных полях . Для этой цели доступны специальные версии приводов.
Преимущества малой конструктивной высоты приводов PILine ® становятся очевидными при использовании таких систем позиционирования, как перекрестный столик микроскопа M-687 (высота 25 мм): неизменно плоская конструкция без шпиндельных каналов или фланцевых двигателей.
Продукция PILine®: поворотный столик U-651 и перекрестный столик микроскопа M-686KНадежная конструкция с прямым приводом и малое время отклика пьезокерамики обеспечивают очень быстрый старт/стоп и скорости до нескольких 100 мм/с.
Потребность в более высоких скоростях сканирования или большей пропускной способности характеризует лишь некоторые области применения микроскопии. Другие требуют движения с высоким разрешением на низких постоянных скоростях.
Сцены с приводами PILine® могут быть оснащены датчиками PIOne и могут достигать разрешения в диапазоне одиночных нанометров. Затем специальные процессы управления и регулирования обеспечивают постоянную скорость в диапазоне отсчетов одного энкодера в секунду.