Робот (машина) | это… Что такое Робот (машина)?
Робот-андроид Honda
Ро́бот (от словацк. robota) — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.[1]
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Содержание
|
 1 Известные коммерческие модели роботов
1 Известные коммерческие модели роботовИстория возникновения слова
Слово «робот» было придумано чешским писателем Карелом Чапеком и его братом Йозефом и впервые использовано в пьесе Чапека «Р.У.Р.» («Россумские универсальные роботы», 1921). До появления промышленных роботов считалось, что роботы должны выглядеть подобно людям.
Надо сказать, что роботы Чапека были не механическими, а биологическими существами. Просто у них отсутствовали некоторые человеческие функции, в частности способность влюбляться, а значит и желание продолжать свой род. В произведении фантаста роботы преодолели этот недостаток и стали неотличимы от людей.
Предыстория
Искусственные существа
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею.![]()
Похожий миф излагается в скандинавском эпосе Младшая Эдда. Там рассказывается о глиняном гиганте Мисткалфе, созданный троллем Рунгнером для схватки с Тором, богом грома.
Технические устройства
Первый чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн скорее всего основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
Французский механик и изобретатель Жак де Вокансон создал в 1738 году первое работающее человекоподобное устройство (андроид), которое играло на флейте. Он также изготовил механических уток, которые, как говорили, умели клевать корм и «испражняться».
Хронология
Конец XIX века — Русский инженер Пафнутий Чебышев придумал механизм — ступоход, обладающий высокой проходимостью.
1898 — Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно.
1921 — Чешский писатель Карел Чапек представил публике пьесу под названием «Россумские Универсальные Роботы», откуда и взяло начало слово «робот» (от словацк. robota).
1930-е — Появились конструкции внешне напоминающих человека устройств, способных выполнять простейшие движения и воспроизводить фразы по команде человека. Первый такой «робот» был сконструирован американским инженером Д. Уэксли для Всемирной выставки в Нью-Йорке в 1927 году.
1950-е — Для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.
1960 — Дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
1979 — В МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01.
2000 — В Чечне был успешно применён робот-разведчик «Вася» для обнаружения и обезвреживания радиоактивных веществ.
2005 — ВМФ России в Балтийском море проведены испытания подводного робота-разведчика «Гном».
Устройство
Система передвижения
Советский Луноход-1
Для передвижения по открытой местности чаще всего используют колёсную или гусеничную, реже — шагающую систему передвижения роботов. Это самые универсальные виды систем перемещения.
Робот на гусеничном ходу
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Внутри помещений, на промышленных объектах используются передвижения вдоль монорельсов, по напольной колее и т. д. Для перемещения по наклонным, вертикальным плоскостям используются системы, аналогичные «шагающим» конструкциям, но с пневматическими присосками.
Основная статья: Промышленный робот
Появление станков с числовым программным управлением (ЧПУ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Бытовые роботы
Основная статья: Бытовой робот
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка Sony.
В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы «Вакамару» производства фирмы
Всё большую популярность набирают роботы-уборщики, по своей сути — автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Роботы для обеспечения безопасности
- Р-БОТ 001
Роботы как хобби
Изобретатель Пит Редмонд (Pete Redmond) создал робота RuBot II, который может собрать кубик Рубика за 35 секунд.
Существует также направление моделизма, которое подразумевает создание роботов. Сейчас моделисты делают как радиоуправляемых роботов, так и автономных. Проводятся соревнование по нескольким основным направлениям.
Некоторые соревнования мобильных роботов:
- Молодежный научно-технический фестиваль «Мобильные роботы»
- Российская национальная лига ЕВРОБОТ
Среди соревнований автономных роботов стоит упомянуть следование по линии на скорость, борьбу сумо, футбол роботов.
Интересные факты
Трагические факты
- В 1981 году Кэндзи Урада, рабочий завода Kawasaki стал первой официальной жертвой, погибшей от руки робота.[3] С этого времени число жертв роботов растет, несмотря на внедрение усовершенствованных механизмов безопасности.
- 18 марта 2008 года 81-летний австралиец стал первым человеком, который покончил жизнь самоубийством при помощи робота, которого сам собрал согласно схемам, взятым из сети Интернет.[4]
Производители роботов
- Mitsubishi
Известные коммерческие модели роботов
- Aibo
- Pleo
- SCORBOT-ER 4u
- Wakamaru
Художественная литература
С развитием технологии люди всё чаще видели в механических созданиях что-то больше, чем просто игрушки. Литература отразила страхи человечества, что люди могут быть заменены своими собственными творениями. Роман «Франкенштейн, или Современный Прометей» (1818) иногда называют первым научно-фантастическим произведением, олицетворяющим эту проблему.
- Робот не может причинить вреда человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен выполнять приказы человека в той мере, в которой это не противоречит Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Азимов в своих произведениях убедительно показывает, что эти законы, будучи заложены в программу-мозг робота в виде обязательных (безусловно исполняемых роботом) законов исключают возможность проявления любых недружественных действий робота по отношению к человеку. Приводятся также примеры негативных последствий, возникающих в случае, когда люди пренебрегая требованиям обязательности трех законов блокируют на этапе программирования робота один из законов (например, вторую часть первого закона). В этом случае робот может найти логически непротиворечивое решение, позволяющее ему нарушить 1-й закон и стать опасным для человека.
Приводятся также примеры негативных последствий, возникающих в случае, когда люди пренебрегая требованиям обязательности трех законов блокируют на этапе программирования робота один из законов (например, вторую часть первого закона). В этом случае робот может найти логически непротиворечивое решение, позволяющее ему нарушить 1-й закон и стать опасным для человека.
Также Айзеком Азимовым (в романах «Роботы и Империя», «На пути к основанию»)сформулирован так называемый «нулевой» закон робототехники: «Робот не может причинить вред человечеству или своим бездействием способствовать этому»
«…Нулевой. Робот не может причинить вред человечеству или, своим бездействием, способствовать этому. Тогда Первый Закон следует читать следующим образом: Первый. Робот не может причинить вред человеческому существу или, своим бездействием, способствовать этому, кроме тех случаев, когда это противоречит Нулевому Закону. Таким же образом следует трактовать и последние два…» — Айзек Азимов «На пути к основанию»
Сноски
- ↑ Толковый словарь под ред.
 Ефремовой
Ефремовой - ↑ http://chip-news.ru/archive/chipnews/200402/Article_14.pdf
- ↑ http://aeterna.ru/userpost.php?Diabola&post=121642
- ↑ http://www.infox.ru/hi-tech/tech/2009/02/12/robots_will_not_harm_people_2.phtml
 Ефремовой
ЕфремовойСм. также
- Андроид
- Искусственный интеллект
- Киборг
- Робототехника
- Соревнования ПАТС (автоматических автомобилей)
- Зал славы роботов
- Боевой робот
Ссылки
- Робототехника в России — каталог сайтов по робототехнике.
- Roboforum.RU — Русскоязычное сообщество любительской робототехники
- Всё для робототехника. Действующие модели роботов и системы искусственного интеллекта
- Практическая робототехника
- Социальная сеть по созданию роботов
- Университетская программа исследований в области роботехники
- Робот Экобот — энергия для роботов из биологических продуктов
- Япония готовится принять на работу роботов
- Новости робототехники
- Будущее роботов: от дворников до хирургов
Видео
- Четырёхногий адаптивный робот фирмы Boston Dynamics (март 2008)
Робототехника, что именно это значит? Когда машина становится роботом? Что нам предложит робототехника в будущем? — Jungheinrich на vc.
 ru
ruАвтоматизация является одним из главных направлений развития в секторе внутрипроизводственной логистики. Данная тенденция развивается прежде всего за счет бурного развития онлайн-торговли и нехватки специалистов в области логистики по всему миру, в частности это касается операторов складской подъемно-погрузочной техники. Растущий объем товаров с комплексным управлением возвратами, строго синхронизированные процессы доставки, все более короткие сроки обработки и сложная складская среда требуют автоматизированных управляемых транспортных средств, которые работают автономно.
609 просмотров
В 2020 году Jungheinrich AG, головной офис которой находится в г. Гамбург, приобрела долю в мюнхенском робототехническом стартапе Magazino GmbH. Компании договорились о масштабном стратегическом сотрудничестве и намерены объединить накопленные знания в области автоматизации склада. Magazino занимается разработкой и изготовлением транспортных роботов, которые анализируют окружающую обстановку и умеют принимать решения исходя из ситуации. В 2014 году компания вышла на рынок, представив самоходного робота-комплектовщика заказов, который умеет перемещаться по складу по оптимальным маршрутам и точно подбирать нужные коробки. Эта система уже используется на складах различных компаний в области e-commerce.
В 2014 году компания вышла на рынок, представив самоходного робота-комплектовщика заказов, который умеет перемещаться по складу по оптимальным маршрутам и точно подбирать нужные коробки. Эта система уже используется на складах различных компаний в области e-commerce.
https://www.jungheinrich.ru/o-nas/pressa-sobytija/news/jungheinrich-ag-и-magazino-860892
В 2014 году компания вышла на рынок, представив самоходного робота-комплектовщика заказов, который умеет перемещаться по складу по оптимальным маршрутам и точно подбирать нужные коробки.
Автоматизированная техника работает вместе с людьми и имеет более высокие показатели гибкости и эффективности в области электронной коммерции,автомобилестроения, моды и логистики производства. Современные производства без промышленных роботов невозможны. Автомобили почти исключительно построены гигантскими промышленными роботами, которые выполняют одни и те же движения и одни и те же рабочие шаги чрезвычайно точно и быстро снова и снова. Это возможно в полностью статичной среде с использованием обычного набора алгоритмов. Обычные автоматизированные управляемые транспортные средства требуют модифицированной рабочей среды или спецификации фиксированных маршрутов – например, оптических направляющих или наземных меток.
Это возможно в полностью статичной среде с использованием обычного набора алгоритмов. Обычные автоматизированные управляемые транспортные средства требуют модифицированной рабочей среды или спецификации фиксированных маршрутов – например, оптических направляющих или наземных меток.
В случае Jungheinrich наша область-склад, и навигация состоит в первую очередь из двух вещей: во-первых, найти путь к заданной локации, избегая препятствий, и, во-вторых, совершить требуемую операцию по обработке груза. Например, оказавшись на месте, роботы должны определить целевой объект на полу или на стеллаже, а затем успешно взять его. AGV, или автоматизированные управляемые транспортные средства, в первую очередь применяются на складе для повторяющихся операций: перемещают товары из одной точки в другую, штабелируют грузы на стеллажах или осуществляют погрузку/разгрузку грузового транспорта.
Однако существует один спорный момент в терминологии: являются ли робототехника и автоматизация синонимами?
Если присмотреться повнимательнее, то многие обычные роботы сегодня являются лишь очень мощными машинами. Хотя эти роботы являются современными, они подпадают под зонт традиционной робототехники. Их действия полностью предопределены, что означает, что они детерминированы и не автономны. Другим примером может служить стиральная машина. Как только кнопка нажата, она начинает свою стандартную рабочую процедуру. Здесь нет никаких вариаций.
Хотя эти роботы являются современными, они подпадают под зонт традиционной робототехники. Их действия полностью предопределены, что означает, что они детерминированы и не автономны. Другим примером может служить стиральная машина. Как только кнопка нажата, она начинает свою стандартную рабочую процедуру. Здесь нет никаких вариаций.
В то же время, роботы-это сенсомоторные машины с расширенными возможностям действовать там, где не сможет человек. Они состоят из мехатронных компонентов, датчиков и компьютерных функций управления. Сложность робота существенно отличается от других машин большим числом степеней свободы и разнообразием и размахом его поведенческих форм. Таким образом самое большое различие между простой машиной и роботом — это способность действовать автономно в определенных ситуациях.
Чем разнообразнее и динамичнее пространство, тем умнее роботы должны быть. Это включает в себя их способность перемещаться автономно.
Склады в реальном мире-это не статика. Люди работают в них и непрерывно меняют окружающую среду; товары перемещаются, новые препятствия приходят и уходят. В любой среде, где работают люди, среда динамична и подвержена изменениям. Люди — не роботы, их движения не предопределены заранее. Люди не помещают предметы с точностью до миллиметра, идеально выровненные с полкой. Робот должен уметь работать с этим человеческим хаосом эффективно и безотказно.
В любой среде, где работают люди, среда динамична и подвержена изменениям. Люди — не роботы, их движения не предопределены заранее. Люди не помещают предметы с точностью до миллиметра, идеально выровненные с полкой. Робот должен уметь работать с этим человеческим хаосом эффективно и безотказно.
В каждой ситуации робот должен определить оптимальный маршрут движения через склад и где лучше всего захватить целевой объект.
В каждой ситуации робот должен определить оптимальный маршрут движения через склад и где лучше всего захватить целевой объект. Он также сталкивается с препятствиями и другими движущимися объектами. Чтобы работать надежно и слаженно, даже в таких условиях, роботам необходим навык: умение приспосабливаться. Для этого им нужно как можно больше информации о текущей ситуации в их окружении. С помощью этой информации они могут затем адаптировать свои пути и работать более эффективно. Эта концепция основана на том, что отдельные роботы могут собирать данные о своей локальной среде во время работы. Таким образом, наш подход заключается в облачном отображении и локализации в динамических складских средах. Каждый раз, когда робот проходит по проходу, он воспринимает свое окружение через датчики и камеры. Если на пути ему попадается препятствие, он останавливается и ищет другой путь, чтобы добраться до места назначения.
Таким образом, наш подход заключается в облачном отображении и локализации в динамических складских средах. Каждый раз, когда робот проходит по проходу, он воспринимает свое окружение через датчики и камеры. Если на пути ему попадается препятствие, он останавливается и ищет другой путь, чтобы добраться до места назначения.
Чтобы успешно перейти из пункта А в пункт Б, они должны сначала локализовать себя, а затем преодолеть препятствия и новые ситуации на своем пути. Для этого роботы оснащены интеллектуальными алгоритмами и коллективным восприятием.
Уже не фантастика, если робот А может поделиться своими знаниями с роботом Б. В сотрудничестве с Google Cartographer для роботов Magazino дополнительно разработана библиотека локализации и картографирования в реальном времени. В конкретных терминах это означает, что каждый робот на складе посылает данные в облако и одновременно сравнивает свою сохраненную внутреннюю карту хранилища с данными в облаке. Таким образом, роботы уже могут делиться своими знаниями об окружающей среде и использовать их для локальной оптимизации. Можно сказать, что группа роботов воспринимает окружающую среду коллективно и постоянно совершенствуются вместе: роботы -это настоящие командные игроки. Благодаря новой технологии автоматизации они могут работать вместе с людьми. Гибкое планирование маршрута, интеллектуальное избегание препятствий и сетевая коммуникация позволяют роботу самостоятельно выполнять заказы на хранение и извлечение данных.
Можно сказать, что группа роботов воспринимает окружающую среду коллективно и постоянно совершенствуются вместе: роботы -это настоящие командные игроки. Благодаря новой технологии автоматизации они могут работать вместе с людьми. Гибкое планирование маршрута, интеллектуальное избегание препятствий и сетевая коммуникация позволяют роботу самостоятельно выполнять заказы на хранение и извлечение данных.
Например, самообучающиеся роботы-сборщики освобождают своих коллег-людей. На складе эти роботы могут не только выполнять отдельные шаги, но и фактически выполнять все операции, которые выполняет человек-работник, например, завершить весь процесс комплектации. Это означает, что робот может продолжать работать ночью, после того, как люди закончат свои смены.
Гибкое планирование маршрута, интеллектуальное избегание препятствий и сетевая коммуникация позволяют роботу самостоятельно выполнять заказы на хранение и извлечение данных.
Подключенные к системе управления складом, они получают свои заказы на подбор через Wi-Fi. Затем они автономно перемещаются к нужной полке, идентифицируют целевой объект с помощью своих камер и датчиков, захватывают его, хранят и транспортируют для дальнейшей обработки.
Затем они автономно перемещаются к нужной полке, идентифицируют целевой объект с помощью своих камер и датчиков, захватывают его, хранят и транспортируют для дальнейшей обработки.
Однако, робототехника будущего выглядит иначе.
Продвинутый робот должен принимать свои собственные решения.
В двух словах можно сказать, что завтрашняя робототехника уже не детерминистична, она гибка, интеллектуальна и автономна. Настоящий квантовый скачок. Чтобы понять степень этого изменения, мы сделаем еще один шаг назад и посмотрим на (все еще) воображаемую стиральную машину: с помощью различных датчиков стиральная машина распознает, какое белье она должна стирать сегодня. Например, черная спортивная одежда. Зная это, он выбирает соответствующее моющее средство и температуру. Он использует уровень воды в машине для расчета продолжительности цикла стирки. И если запасы моющего средства заканчиваются, он отправляет заказ в заранее определенный интернет-магазин. Это поведение намного умнее, чем обычный промышленный робот, но это далеко не “продвинутый робот”, потому что стиральная машина не автономна. Его поведенческое пространство все еще крайне ограничено, ему не хватает способности реагировать на новые ситуации. Он хорошо запрограммирован, его датчики работают, но только в определенной области. Если “черный” и «спортивная одежда» не отображаются в коде программы, она не может работать.
Его поведенческое пространство все еще крайне ограничено, ему не хватает способности реагировать на новые ситуации. Он хорошо запрограммирован, его датчики работают, но только в определенной области. Если “черный” и «спортивная одежда» не отображаются в коде программы, она не может работать.
И преодоление именно этой задачи стартап делает роботов «продвинутыми» в прямом смысле этого слова. Роботы могут не только адаптировать индивидуальные параметры своих действий, но и принимать решение о выполнении совершенно разных действий в зависимости от ситуации. Способность адаптироваться позволяет роботам справляться со сложными реальными проблемами.
Роботам будущего нужен мозг.
···В прошлом роботы были очень детерминистичны – можно сказать, трудолюбивы, но глупы. После того, как они запрограммированы, они помещают, к примеру, сварочный инструмент в одно и то же место тысячи раз с фиксированной скоростью. Более того, поскольку эти роботы не воспринимали окружающее, не говоря уже о способности разумно реагировать на него, они должны были работать, отделенные от людей перегородками в отдельных цехах. Это коренным образом изменилось. Отсюда вытекают два следствия: окружающая среда может быстро изменяться, и робот всегда должен действовать безопасно. Благодаря использованию многочисленных датчиков, 3D камеры и компьютерное зрение, роботы нового поколения теперь лучше понимают, что происходит в их среде. В то же время окружающая среда для роботов становится все более сложной, особенно если им приходится работать с людьми в одной и той же области. Существующие программные инструменты и системы управления больше не могут соответствовать этим требованиям. Нам нужны радикально новые подходы к программированию, управлению и созданию сетей роботов. Это происходит потому, что роботы следующего поколения уже не детерминированы, а управляются восприятием. Поэтому разработан ACROS. Можно сказать, что это что-то вроде мозга для роботов.
Это коренным образом изменилось. Отсюда вытекают два следствия: окружающая среда может быстро изменяться, и робот всегда должен действовать безопасно. Благодаря использованию многочисленных датчиков, 3D камеры и компьютерное зрение, роботы нового поколения теперь лучше понимают, что происходит в их среде. В то же время окружающая среда для роботов становится все более сложной, особенно если им приходится работать с людьми в одной и той же области. Существующие программные инструменты и системы управления больше не могут соответствовать этим требованиям. Нам нужны радикально новые подходы к программированию, управлению и созданию сетей роботов. Это происходит потому, что роботы следующего поколения уже не детерминированы, а управляются восприятием. Поэтому разработан ACROS. Можно сказать, что это что-то вроде мозга для роботов.
Благодаря использованию многочисленных датчиков, 3D камеры и компьютерное зрение, роботы нового поколения теперь лучше понимают, что происходит в их среде.
ACROS расшифровывается как” Advanced Cooperative Robot Operating System » и является операционной системой, разработанной для управляемых восприятием роботов Magazino. ACROS делает возможной управляемую восприятием робототехнику.
В прошлом роботы всегда программировались их индивидуальными производителями с помощью специального программного обеспечения, специально адаптированного к их соответствующим потребностям.
ACROS впервые позволяет программировать различные типы роботов с помощью комплексной «операционной системы». Это позволило бы физическим (аппаратным) компонентам роботов стать взаимозаменяемыми в будущем-интеллект лежит в программной структуре ACROS. ACROS связывает данные всего эксплуатируемого парка и немедленно сообщает об изменениях окружающей среды всем роботам. Они подключены через Wi-Fi к локальному облаку, которое, в свою очередь, связано с соответствующей системой управления складом. Таким образом, роботы могут получать свои заказы, подтверждать их выполнение и получать обновления программного обеспечения или среды.
В сочетании с приложением ARC (ACROS Robot Control) происходит мониторинг отдельных роботов или всего автопарка. Менеджер склада или производства может следить за путями и действиями своих роботов на интуитивно понятном пользовательском интерфейсе. Это позволяет ему получить быстрый обзор заказов, которые уже были завершены, текущих заказов и предстоящих заказов в любое время.
Продвинутые кооперативные роботы могут учиться самостоятельно: сеть ACROS и подключенная глобальная база данных обеспечивают машинное обучение и, следовательно, интеллектуальное поведение.
И вот тут-то и есть экстраординарный потенциал. Поскольку все больше роботов по всему миру работают с ACROS, больше знаний собирается в облаке. Благодаря этой сети роботы могут учиться друг у друга и постоянно совершенствоваться.
И как это будет выглядеть в будущем?
ACROS будет совместим с многочисленными типами роботов. Только аппаратные компоненты ACROS должны быть адаптированы, например, для управления роботизированным манипулятором. Еще одним важным преимуществом будет то, что все роботы будут работать с ACROS вы сможете поделиться своим «опытом» в облаке. Наше роботизированное решение может быть гибко адаптировано к изменяющимся условиям или растущим требованиям – например, за счет увеличения размера парка роботов или расширения области их применения.
Еще одним важным преимуществом будет то, что все роботы будут работать с ACROS вы сможете поделиться своим «опытом» в облаке. Наше роботизированное решение может быть гибко адаптировано к изменяющимся условиям или растущим требованиям – например, за счет увеличения размера парка роботов или расширения области их применения.
Внедрение комплектовочного робота TORU в Европейском распределительном центре компании ASICS.
Как роботы применяются на практике?
Продолжающийся рост электронной коммерции и все меньшие размеры партий требуют автоматизированных решений, которые могут быть гибко адаптированы и масштабированы по мере необходимости. В феврале 2020 года робототехническая компания Magazino выиграла тендер компании ASICS* в качестве поставщика мобильного робота TORU. Ведущий спортивный бренд ASICS будет использовать роботов в своем европейском дистрибьюторском центре (EDC) в Крефельде, Германия. С внедрением интеллектуальных и мобильных роботов-сборщиков ASICS стала одним из инновационных пионеров в этой отрасли. Используя робота TORU, ASICS внедряет гибкую автоматизацию процесса ручной комплектации на своем обувном складе.
Используя робота TORU, ASICS внедряет гибкую автоматизацию процесса ручной комплектации на своем обувном складе.
Мобильный сборный робот TORU работает полностью автономно с помощью технологии 3D-камеры, многочисленных датчиков и может работать как в выходные, так и в ночное время. TORU сокращает типичные пики заказов в электронной коммерции и улучшает обслуживание клиентов, обеспечивая более быструю обработку срочных заказов.
Ведущий спортивный бренд ASICS будет использовать роботов в своем европейском дистрибьюторском центре (EDC) в Крефельде, Германия.
TORU едет по коридору на складе и хочет повернуть налево, только чтобы обнаружить, что проход заблокирован человеком. TORU не просто останавливается, он сразу же вычисляет альтернативный маршрут до места назначения. По прибытии он не находит целевой пакет в его ожидаемом месте. С помощью своих камер он теперь обыскивает окрестности, чтобы найти нужный объект, успешно захватывая его. С помощью вакуумного захвата TORU забирает отдельные обувные коробки из стеллажной системы, транспортирует их на станцию передачи, а также укладывает возвраты. Через Wi-Fi робот подключается не только к системе управления складом ASICS (WMS), но и к локальному и глобальному облаку, благодаря операционной системе ACROS. Благодаря этой связи и использованию искусственного интеллекта TORU каждый день учится на своем опыте, улучшает свою собственную производительность и надежность и в то же время делится знаниями со своими коллегами-роботами во группе.
С помощью вакуумного захвата TORU забирает отдельные обувные коробки из стеллажной системы, транспортирует их на станцию передачи, а также укладывает возвраты. Через Wi-Fi робот подключается не только к системе управления складом ASICS (WMS), но и к локальному и глобальному облаку, благодаря операционной системе ACROS. Благодаря этой связи и использованию искусственного интеллекта TORU каждый день учится на своем опыте, улучшает свою собственную производительность и надежность и в то же время делится знаниями со своими коллегами-роботами во группе.
TORU может избавить сотрудников от менее эргономичных задач, например, при выборе с нижней или верхней полки или с особенно больших расстояний ходьбы на складе. Благодаря многочисленным датчикам, Тору робот воспринимает окружающую среду в режиме реального времени, обнаруживает людей или препятствия на своем пути и поэтому работает в безопасном режиме рядом с людьми в той же рабочей зоне. Имея до 18 часов рабочего времени, TORU также может работать в ночное время.
Автоматизация является одним из главных направлений развития в отрасли внутрипроизводственной логистики последние пять лет. Новое стратегическое партнерство концерна Jungheinrich AG и инновационного стартапа Magazino вскоре откроет коммерческой отрасли доступ к эффективным и надежным решениям нового уровня, которые значительно изменят свойства и облик современного склада.
*О компании ASICS Corporation
Компания ASICS со штаб-квартирой в Кобе, Япония, является ведущим дизайнером, производителем и розничным продавцом высокоэффективной спортивной обуви, одежды и аксессуаров. Основанная в 1949 году Кихачиро Оницука, название компании происходит от латинского слова Anima Sana In Corpore Sano (“здоровый дух в здоровом теле”), и эта максима продолжает руководить деятельностью организации в целом. ASICS имеет региональные операции в Японии, Америке, Европе и Океании, а также в Южной, Восточной и Юго-Восточной Азии, распространяя продукцию более чем в 150 странах и регионах по всему миру. Компания также управляет классической обувью Onitsuka и брендом Haglofs outdoor.
Компания также управляет классической обувью Onitsuka и брендом Haglofs outdoor.
Самоуправляемые автомобили и три закона Азимова о роботах
Применение трех законов робототехники Азимова к беспилотным автомобилям.
gettyЭти роботы с их дикими и сумасшедшими выходками.
Достижения в области искусственного интеллекта (ИИ) будут способствовать широкому внедрению роботов в нашу повседневную жизнь. Роботы, которые когда-то казались настолько дорогими, что их можно было позволить себе только для тяжелых производственных целей, постепенно снижаются в цене и в равной степени уменьшаются в размерах. Вы можете считать, что пылесос Roomba в вашем доме является своего рода роботом, хотя у нас все еще нет обещанного домашнего робота-дворецкого, который должен был бы заботиться о наших повседневных рутинных делах.
Возможно, одним из самых известных аспектов роботов является легендарный набор из трех правил, предложенный писателем Айзеком Азимовым. Его научно-фантастический рассказ под названием «Три закона » был опубликован в 1942 году, и, казалось бы, его не остановить с точки зрения постоянного интереса и охвата.
Его научно-фантастический рассказ под названием «Три закона » был опубликован в 1942 году, и, казалось бы, его не остановить с точки зрения постоянного интереса и охвата.
Вот три правила, которые он искусно придумал:
1) Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред,
2) Робот должен подчиняться отданным ему приказам. людьми, за исключением случаев, когда такие приказы противоречат Первому Закону,
3) Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
Хотя он назвал их законами, пожалуйста, знайте, что они якобы не являются фактическими законами как таковыми.
Одной из точек зрения на законы является понятие законов природы. Эти три правила не являются законами природы, поскольку в них нет ничего, что можно было бы каким-то образом определить как неумолимо проникнутое природой или требуемое ее течением. Эти правила придуманы человеком и являются дискреционными для человечества. Их можно наблюдать и повиноваться, или ими можно полностью пренебречь, в зависимости от того, что мы выберем.
Эти правила придуманы человеком и являются дискреционными для человечества. Их можно наблюдать и повиноваться, или ими можно полностью пренебречь, в зависимости от того, что мы выберем.
БОЛЬШЕ ДЛЯ ВАС
Другая точка зрения на законы — это аспект правил и положений, созданных человечеством. Наша уважаемая Конституция — это указание на законы, то, что мы, как общество, решили попробовать и жить в соответствии с ними. Таким образом, вы могли бы утверждать, что Азимов предлагал законы, которые мы должны включить в наши юридические книги как разумные в эпоху роботов, которые могут бродить среди нас.
Его три правила еще не воплощены непосредственно в наших законах, и нам придется посмотреть, будет ли в конечном итоге иметь смысл кодифицировать их соответствующим образом. Вас может заинтересовать тот факт, что сейчас много беспокойства и внимания уделяется тому, как лучше всего управлять новейшими системами ИИ, и мы можем обнаружить, что сильно опираемся на три правила Азимова (мои обсуждения этики и управления ИИ см. по ссылке здесь).
по ссылке здесь).
Когда вы читаете замечания Азимова о роботах, вы можете заменить слово «робот» общим прозвищем ИИ. Я говорю это потому, что в противном случае вы, вероятно, узко интерпретируете его три правила, как будто они применимы только к роботу, который выглядит как мы, условно имея ноги, руки, голову, тело и так далее.
Не все роботы обязательно так устроены.
Некоторые из новейших роботов выглядят как животные. Возможно, вы видели популярные онлайн-видео о четвероногих роботах, которые выглядят как собаки или подобные существа. Есть даже роботы, напоминающие насекомых. Они выглядят довольно жутко, но, тем не менее, важны как средство для выяснения того, как мы можем использовать робототехнику во всевозможных возможностях.
Робот не обязательно должен быть вдохновлен биологией. Робот-пылесос не особо похож на какое-то привычное животное или насекомое. Вы можете ожидать, что у нас будут всевозможные роботы, которые выглядят довольно необычно и не основаны исключительно на каком-либо живом организме.
В любом случае, среди разнообразия роботов, которые мы увидим, три правила Азимова весьма полезны, независимо от того, что это за робот и как он может выглядеть. Я знаю, что это кажется немного натянутым, но скромный робот-пылесос может быть кандидатом на соблюдение трех правил. Да, по-видимому, ваш вращающийся робот-пылесос в вашем доме не должен пытаться причинить вам вред и должен делать все возможное, чтобы избежать этого.
Некоторые роботы легко появляются перед нашими глазами, но мы не думаем о них как о роботах.
Одним из таких примеров является появление настоящих беспилотных автомобилей на основе искусственного интеллекта.
Можно сказать, что автомобиль, которым управляет система ИИ, является типом робота. Причина, по которой вы можете не думать о самоуправляемом автомобиле как о роботе, заключается в том, что в нем нет говорящего робота, сидящего на водительском сиденье. Вместо этого компьютерная система, спрятанная в днище или багажнике автомобиля, управляет им. Это, кажется, ускользает от нашего внимания, и поэтому транспортное средство не похоже на своего рода робота, хотя на самом деле это так.
Это, кажется, ускользает от нашего внимания, и поэтому транспортное средство не похоже на своего рода робота, хотя на самом деле это так.
Если вам интересно, в настоящее время предпринимаются обнадеживающие усилия по созданию говорящих роботов, способных водить машину (см. мой репортаж по этой ссылке здесь).
Представьте, как это потрясет наш мир.
В настоящее время создание автомобиля с автоматическим управлением включает в себя модификацию автомобиля для самостоятельного вождения. Если бы у нас были роботы, которые могли бы ходить, садиться в машину и управлять транспортным средством, это означало бы, что все существующих автомобилей можно было бы считать самоуправляемыми автомобилями (имеется в виду, что ими могли бы управлять такие роботы, а не человек за рулем автомобиля). Вместо того, чтобы постепенно выбрасывать обычные автомобили для появления беспилотных автомобилей, не было бы необходимости разрабатывать полностью автономный автомобиль, и мы полагались бы на этих блуждающих роботов в качестве наших водителей.
В настоящее время самым быстрым или ближайшим путем к созданию беспилотных автомобилей является встраивание их в транспортные средства. Некоторые считают, что в этом подходе есть горькая ирония. Они утверждают, что эти новые беспилотные автомобили неизбежно будут узурпированы этими говорящими роботами. В этом смысле самоуправляемый автомобиль сегодня устареет и выйдет из моды, уступив место традиционным средствам управления, так что либо транспортным средством может управлять человек, либо управляющий робот.
Вдобавок ко всему, некоторые надеются, что мы продвинемся в разработке самоуправляемых автомобилей так далеко, что не будем использовать независимых роботов для управления нашими автомобилями.
Вот логика.
Если за рулем сидит робот-водитель, это говорит о том, что обычные элементы управления вождением по-прежнему будут доступны внутри автомобиля. Это также означает, что люди по-прежнему смогут водить машину, когда захотят. Но считается, что системы вождения с искусственным интеллектом, будь то встроенные или часть говорящего робота, будут лучшими водителями и снизят количество случаев вождения в нетрезвом виде и других неблагоприятных действий за рулем./imgs/2017/12/20/07/1428083/eca3bab547dc3f2218dc821ad0d398cb045dd0d7.jpg) Короче говоря, настоящий самоуправляемый автомобиль не будет иметь никаких средств управления вождением, что не позволит ходячему говорящему роботу управлять автомобилем (предположительно) и не позволит (к счастью, некоторые утверждают) человеку управлять автомобилем.
Короче говоря, настоящий самоуправляемый автомобиль не будет иметь никаких средств управления вождением, что не позволит ходячему говорящему роботу управлять автомобилем (предположительно) и не позволит (к счастью, некоторые утверждают) человеку управлять автомобилем.
Это наводит на мысль о том, что, возможно, мир полностью переключится на настоящие самоуправляемые автомобили, и хотя ходячий говорящий робот-водитель может стать возможным, дело зайдет так далеко, что никто не повернет время вспять и вновь не введет обычные автомобили. легковые автомобили.
Это похоже на принятие желаемого за действительное (или, возможно, задумчивое) принятие желаемого за действительное.
Так или иначе, главная цель, похоже, состоит в том, чтобы исключить человека-водителя из уравнения.
Это поднимает еще один важный и иногда упускаемый из виду момент, связанный с роботами, а именно то, что они могут быть поставлены в положения, требующие усилий, которые влекут за собой жизнь или смерть. Ваш домашний робот-пылесос вряд ли будет принимать решения о жизни и смерти. Между тем, самоуправляемый автомобиль, имеющий встроенную систему управления ИИ, или даже робот-водитель, несомненно, будет стоять на грани жизни и смерти, выясняя судьбу людей.
Ваш домашний робот-пылесос вряд ли будет принимать решения о жизни и смерти. Между тем, самоуправляемый автомобиль, имеющий встроенную систему управления ИИ, или даже робот-водитель, несомненно, будет стоять на грани жизни и смерти, выясняя судьбу людей.
Каждый день, когда вы садитесь за руль автомобиля, вы принимаете решения о жизни и смерти, осознаете ли вы это или осознаете, что это так. При плохом повороте руля можно убиться. Кроме того, вы можете в конечном итоге убить других, врезавшись в другую машину или, возможно, ударив пешеходов. Вождение полностью связано с жизнью и смертью.
Это может показаться довольно мрачным, но это суровая реальность, которую необходимо подчеркнуть.
Вот почему момент, когда вы помогаете своему подростку научиться водить машину, — это нечто большее, чем просто время общения. В тот момент, когда вы ставите своего любимого водителя-новичка за руль, призрак жизни или смерти внезапно становится совершенно явным. Водитель-подросток обычно тоже чувствует эту тяжесть, и видно, что некоторые неохотно берут на себя такую изрядную ношу.
Поскольку на кону стоит жизнь или смерть, вполне возможно, что нам следует рассмотреть возможность применения трех правил Азимова в случае использования беспилотных автомобилей (казалось бы немыслимым не делать этого, как предложил Виццини в Принцесса-невеста ).
Сегодняшний интригующий вопрос: Применимы ли три закона роботов Азимова к настоящим беспилотным автомобилям на основе ИИ, и если да, то что с этим делать?
Давайте распакуем и посмотрим.
Понимание уровней самоуправляемых автомобилей
В качестве уточнения, настоящими самоуправляемыми автомобилями являются те, в которых искусственный интеллект управляет автомобилем полностью самостоятельно, и во время вождения не требуется никакой помощи человека.
Эти беспилотные транспортные средства считаются Уровнем 4 и Уровнем 5 (см. мое объяснение по этой ссылке здесь), в то время как автомобиль, который требует, чтобы водитель-человек разделял усилия за рулем, обычно считается Уровнем 2 или Уровнем 3.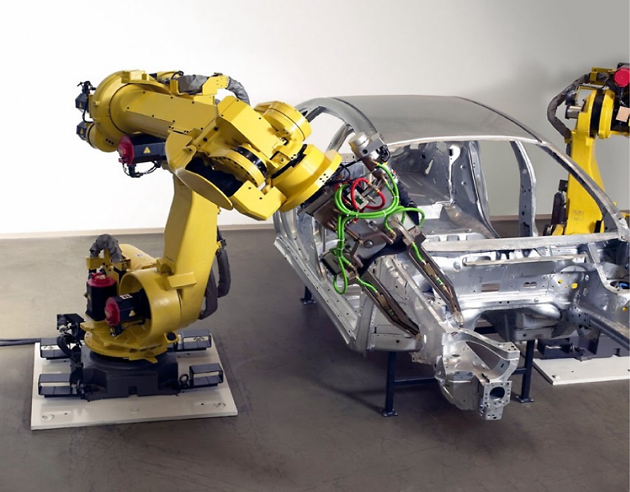 автомобили, которые совместно выполняют задачу вождения, описываются как полуавтономные и обычно содержат множество автоматизированных надстроек, которые называются ADAS (усовершенствованные системы помощи водителю).
автомобили, которые совместно выполняют задачу вождения, описываются как полуавтономные и обычно содержат множество автоматизированных надстроек, которые называются ADAS (усовершенствованные системы помощи водителю).
Настоящего самоуправляемого автомобиля 5-го уровня пока нет, и мы даже не знаем, удастся ли этого достичь и сколько времени потребуется, чтобы добраться до него.
Между тем, усилия уровня 4 постепенно пытаются набрать обороты, проводя очень узкие и выборочные испытания на дорогах общего пользования, хотя существуют разногласия по поводу того, следует ли разрешать эти испытания как таковые (мы все живые или смертельные морские свинки в некоторые утверждают, что это эксперимент, происходящий на наших автомагистралях и переулках, см. мой репортаж по этой ссылке здесь).
Поскольку для полуавтономных автомобилей требуется человек-водитель, внедрение этих типов автомобилей не будет заметно отличаться от вождения обычных транспортных средств, поэтому в этой теме не так много нового, что можно было бы рассказать о них (хотя, как вы понимаете). скоро увидим, следующие пункты применимы в целом).
скоро увидим, следующие пункты применимы в целом).
Для полуавтономных автомобилей важно, чтобы общественность была предупреждена о тревожном аспекте, который возникает в последнее время, а именно о том, что, несмотря на тех водителей, которые продолжают публиковать видео о том, как они засыпают за рулем Уровня 2 или Уровня 3, мы все должны избегать заблуждений, полагая, что водитель может отвлечься от задачи вождения, управляя полуавтономным автомобилем.
Вы несете ответственность за управление транспортным средством, независимо от того, сколько автоматизации может быть добавлено на Уровень 2 или Уровень 3.
Самоуправляемые автомобили и законы Азимова
Для Уровня 4 и Уровня 5 Настоящие самоуправляемые транспортные средства, водитель-человек не будет участвовать в вождении.
Все пассажиры будут пассажирами.
Искусственный интеллект управляет автомобилем
Давайте вкратце рассмотрим каждое из трех правил Азимова и посмотрим, как они могут применяться к настоящим беспилотным автомобилям.
Во-первых, существует правило, согласно которому робот или управляющая система с искусственным интеллектом (в данном случае) не должны причинять вред человеку ни явным действием, ни своим бездействием.
Это трудная задача, когда сидишь за рулем автомобиля.
Вот почему.
Беспилотный автомобиль едет по улице и внимательно осматривается. Без ведома системы вождения ИИ маленький ребенок стоит между двумя припаркованными автомобилями, скрытыми от глаз и скрытыми от сенсорного диапазона и глубины беспилотного автомобиля. ИИ едет с установленной скоростью. Внезапно на улицу выходит ребенок.
Некоторые считают, что беспилотный автомобиль никогда ни с кем не столкнется, поскольку ИИ обладает современными сенсорными способностями и не будет пьяным водителем. К сожалению, в сценарии, который я только что изложил, беспилотный автомобиль врежется в этого ребенка. Я говорю это, потому что закон физики имеет первостепенное значение над любыми мечтательными представлениями о том, на что способна система управления ИИ.
Если ребенок появился из ниоткуда и сейчас находится, скажем, на расстоянии 15 футов от движущегося автомобиля, а беспилотный автомобиль движется со скоростью 30 миль в час, то тормозной путь составляет от 50 до 75 футов, что означает, что ребенок может легко получить удар.
Тут нет двух вариантов.
И это будет означать, что система управления ИИ только что нарушила первое правило Азимова.
ИИ ранил человека. Имейте в виду, что я утверждаю, что ИИ действительно активирует тормоза беспилотного автомобиля и сделает все возможное, чтобы избежать тарана ребенка. Тем не менее, у ИИ недостаточно времени и расстояния, чтобы избежать столкновения.
Теперь, когда мы показали невозможность всегда следовать первому правилу Азимова с точки зрения строгого следования правилу, можно, по крайней мере, утверждать, что система управления ИИ пытался подчиниться правилу. Создается впечатление, что при использовании тормозов система вождения с искусственным интеллектом пыталась удержать ребенка от удара, плюс удар мог бы быть несколько менее сильным, если бы автомобиль был почти остановлен в момент удара.
А как насчет другой части первого правила, в которой говорится, что не должно быть бездействия, которое может привести к причинению вреда человеку?
Можно предположить, что если бы самоуправляемый автомобиль не пытался остановиться, то бездействие такого рода могло бы относиться к этой области, а именно к повторной неудаче в соблюдении правила. Мы можем добавить к этому изюминку. Предположим, что система вождения с искусственным интеллектом смогла развернуть машину, сделав это достаточно, чтобы избежать столкновения с ребенком, но тем временем беспилотный автомобиль врезается в красное дерево. Внутри беспилотного автомобиля находится пассажир, и этот человек получает хлыстовую травму из-за столкновения.
Хорошо, ребенок на улице был спасен, но пассажир внутри беспилотного автомобиля теперь ранен. Вы можете подумать, было ли действие по спасению ребенка достойным по сравнению с результатом ранения пассажира. Кроме того, вы можете подумать, не предпринял ли ИИ надлежащих действий, чтобы избежать травм пассажира.![]() Такого рода этическая дилемма часто изображается через печально известную проблему тележки, аспект, который, как я яростно утверждал, очень применим к автомобилям с автоматическим управлением и заслуживает гораздо более пристального внимания, поскольку появление автомобилей с автоматическим управлением продолжается (см. ссылка здесь).
Такого рода этическая дилемма часто изображается через печально известную проблему тележки, аспект, который, как я яростно утверждал, очень применим к автомобилям с автоматическим управлением и заслуживает гораздо более пристального внимания, поскольку появление автомобилей с автоматическим управлением продолжается (см. ссылка здесь).
В общем, мы можем согласиться с тем, что первое правило триады Азимова — полезная амбициозная цель для настоящего самоуправляемого автомобиля на основе ИИ, хотя выполнение этого стремления будет довольно трудным для достижения и, вероятно, навсегда остается загадкой, с которой общество должно бороться.
Второй из законов Азимова заключается в том, что робот или, в данном случае, управляющая система ИИ, должны подчиняться приказам, отдаваемым ему человеком, за исключением ситуаций, когда такая команда, отдаваемая человеком, противоречит первому правилу (т. е. не не вредить людям).
Это кажется простым и вполне приемлемым.
Но даже у этого правила есть свои проблемы.
Я рассказал историю о человеке, который на машине наехал на стрелка на мосту, который беспорядочно стрелял и убивал людей (см. мое обсуждение, опубликованное 1 июня 2020 г.). По словам властей, водитель проявил героизм, остановив стрелка.
Если бы второй закон Азимова был запрограммирован в систему управления ИИ беспилотного автомобиля, и предположим, что пассажир приказал ИИ переехать стрелка, вероятно, ИИ отказался бы это делать. Это совершенно очевидно, потому что инструкция навредит человеку. Но мы знаем, что это был случай, который, кажется, отвергает жесткое и быстрое правило, которому всегда нужно подчиняться, что вы не должны использовать свою машину, чтобы таранить людей.
Возможно, вы жалуетесь, что это редкое исключение, которое, я полностью согласен, абсолютно необычно.
Кроме того, если бы мы открыли дверь, позволяющую пассажирам беспилотных автомобилей приказывать ИИ сбить кого-нибудь, хаос и хаос в результате были бы недопустимыми. Короче говоря, безусловно, есть основания утверждать, что второе правило следует применять, даже если это означает, что в тех редких случаях его бездействие может причинить вред.
Дело в том, что вам не нужно заходить так далеко за пределы повседневного мира, чтобы найти ситуации, которые были бы бессмысленными для системы вождения с искусственным интеллектом, чтобы беспрекословно подчиняться пассажиру. Водитель в беспилотном автомобиле говорит ИИ подъехать к тротуару. На тротуаре нет пешеходов, поэтому никто не пострадает.
Я спрашиваю вас, должна ли система управления ИИ подчиняться этой человеческой команде?
Нет, ИИ не должен, и в конечном итоге нам придется справляться с тем, какие типы высказываний от людей-пассажиров будут учитывать системы управления ИИ и какие команды будут отклонены (см. мой анализ проблемы лая команд, опубликованный 13 декабря 2020 г.).
Третий закон, который постулировал Азимов, состоит в том, что робот или, в данном случае, система управления ИИ должны защищать свое существование до тех пор, пока не нарушаются первое и второе правила.
Должен ли самоуправляемый автомобиль пытаться сохранить свое существование?
В предыдущей колонке я упомянул, что некоторые считают, что самоуправляемые автомобили будут существовать около четырех лет, в конечном итоге изнашиваясь всего за четыре года вождения (см. мою публикацию от 3 сентября 2019 г.) . Это кажется удивительным, поскольку мы ожидаем, что автомобили прослужат намного дольше, но разница с беспилотными автомобилями заключается в том, что они, по-видимому, будут работать почти 24×7 и проедут гораздо больше миль, чем обычный автомобиль (обычный автомобиль стоит без дела около 9 часов).от 5% до 99% времени).
мою публикацию от 3 сентября 2019 г.) . Это кажется удивительным, поскольку мы ожидаем, что автомобили прослужат намного дольше, но разница с беспилотными автомобилями заключается в том, что они, по-видимому, будут работать почти 24×7 и проедут гораздо больше миль, чем обычный автомобиль (обычный автомобиль стоит без дела около 9 часов).от 5% до 99% времени).
Итак, предположим, что беспилотный автомобиль подходит к концу. Планируется, что автомобиль отправится на свалку для утилизации.
Допустимо ли, что система управления ИИ может решить не ездить в центр утилизации и, таким образом, попытаться сохранить свое существование?
Я полагаю, что если человек сказал ему ехать туда, второе правило побеждает, и беспилотный автомобиль должен подчиняться. ИИ может схитрить и найти какие-то хитрые способы соблюсти первое и второе правило, и, тем не менее, найти добросовестную основу для продолжения своего существования (я оставляю это как осознанное упражнение для вас, чтобы обдумать).
Заключение
Исходя из вышеизложенной логики, кажется, что к трем правилам Азимова нужно относиться с недоверием.
Системы управления ИИ, как правило, могут быть разработаны с использованием этих правил как части всеобъемлющей архитектуры, но, как может быть совершенно очевидно из этого обсуждения, правила являются устремлениями, а не железными неопровержимыми и непреложными законами.
Возможно, самый важный момент в этой мысленной разминке о правилах Азимова — пролить свет на то, чему мало кто уделяет должное внимание. В случае настоящих беспилотных автомобилей на основе искусственного интеллекта разработка и развертывание этих автономных транспортных средств — это гораздо больше, чем просто механические аспекты вождения автомобиля.
Вождение автомобиля — это огромная этическая дилемма, которую люди часто принимают как должное. Нам нужно разобраться в реальности того, как системы вождения ИИ будут принимать решения о жизни и смерти. Это необходимо сделать до того, как мы начнем наводнять наши улицы и переулки беспилотными автомобилями.
Это необходимо сделать до того, как мы начнем наводнять наши улицы и переулки беспилотными автомобилями.
Лучше всего об этом сказал Азимов, когда посетовал на замечание, которое актуально и сегодня, примерно через восемьдесят лет после того, как он умолял нас: «Самый печальный аспект жизни сейчас заключается в том, что наука собирает знания быстрее, чем общество накапливает мудрость».
Истинные слова, которые стоит пересмотреть.
История робототехники в автомобильной промышленности
Часто говорят, что промышленные роботы оставили свой самый большой след в автомобильном мире, но им потребовались многие десятилетия усовершенствований, чтобы добиться этого. Как давно появились роботы? Самые основные идеи берут свое начало во времена Леонардо!
Современная идея робота впервые появилась в пьесе 1921 года. В этой постановке роботы были механическими рабочими, которые помогали людям, но в конце концов они восстали и захватили мир.
Сказать, что это неблагоприятное начало, было бы преуменьшением. Тем не менее, реальные технологии вскоре начали догонять концепцию.
Вторая мировая война дает толчок промышленной автоматизации
Вторая мировая война ознаменовала собой скачок в развитии технологий. У американских автопроизводителей были высокие квоты, и они постоянно искали способы повысить производительность. Конфликт ускорил развитие технологий, подобных первому компьютеру. В 1970 году, когда появилась первая интегральная схема, началась гонка автоматизации.
Ранние промышленные роботы не имели внешних датчиков. Тем не менее, они все еще могли выполнять основные задачи, такие как сбор и размещение. Это сделало автомобильные заводы намного безопаснее для своих сотрудников.
Стрелы для автомобильной автоматизации в 1970-е годы
Прототипы промышленных роботов были развернуты на предприятиях General Motors еще в 1961 году. Эти первые роботы в основном выполняли точечную сварку. Их успех вскоре привлек внимание Форда.
Эти первые роботы в основном выполняли точечную сварку. Их успех вскоре привлек внимание Форда.
В 1969 году был разработан Stanford Arm. Имея шесть степеней свободы, он был способен выполнять задачи, которые ранее роботы не могли выполнять.
Связанные статьи блога
В 1974 году за ним последовала Серебряная рука из Массачусетского технологического института. Используя встроенные чувствительные к давлению датчики и микропроцессор, эта новая рука была гораздо более универсальной. Это открыло путь многолетнему буму роботов с 30-процентным ростом в годовом исчислении.
К 1980-м годам компании по всему миру потратили миллиарды долларов на автоматизацию основных задач на своих сборочных предприятиях. Несмотря на то, что в 1990-х годах развертывание систем автоматизации действительно замедлилось, инновационные технологии привели к его восстановлению.
Automotive Automation Today
Сегодня роботы являются важным элементом обеспечения конкурентоспособности автомобильных заводов.