Радиосхемы. — Датчик Холла SS526DT
материалы в категории
Импульсный датчик скорости и направления вращения преобразует скорость и направление вращения деталей механизма в один электрический сигнал для последующего измерения и индикации параметров работы. Системы автоматического управления могут использовать датчик для включения в петлю обратной связи.
Информация, поступающая от датчика, необходима для формирования управляющих сигналов в системах регулирования и стабилизации параметров перемещения механических узлов автоматизированного объекта. Применения такого датчика требует контроль оборотов выходных валов редукторов, определение направления вращения двух и более синхронизируемых механизмов, учет расхода жидкости и многие другие приборы. Датчик использует всего три провода, с помощью которых подается питание и передается сигнал частоты и направления вращения в прибор системы автоматического управления. Датчик предназначен для применения в системах автоматизации поточных линий, транспортных системах и в других системах автоматического управления.
Технические характеристики микросхемы SS526DT
Измеряемая скорость вращения ….. 0,3…3000 об/мин
Температура эксплуатации ………… –25…+60 °С
Напряжение питания ……………….6,5…18 Вольт
Краткое описание работы датчика Холла
В основе работы датчика лежит преобразование перемещения в электрический сигнал которое выполняет компонент использующий эффект Холла – микросхема SS526DT производства компании Honeywell.
Микросхема содержит два полупроводниковых элемента, генерирующих разность потенциалов при воздействии магнитного поля. Она позволяет определить скорость и направление вращения. Информация об этих параметрах поступает от микросхемы SS526DT в схему датчика с двух соответствующих выходов в цифровом виде: скорости движения соответствует частота импульсов с выхода Speed (далее Скорость), направлению соответствует логический уровень на выходе Direction (далее Направление).
Конструкция датчика скорости и направления оборотов
Вращательное перемещение воспринимает вал датчика через закрепленную на нем шестерню. На валу расположен диск, в котором установлены постоянные магниты. Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера.
На валу расположен диск, в котором установлены постоянные магниты. Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера. Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT. Все элементы заключены в металлический защитный экранирующий кожух.
Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT. Все элементы заключены в металлический защитный экранирующий кожух.
Схема электрическая принципиальная
С выхода датчика скорости и направления поступает сигнал, передающий информацию о скорости оборотов с помощью частоты импульсов, а информация о направлении вращения передается с помощью полярности импульсов.
Выходной сигнал:
Благодаря наличию в схеме датчика источника двуполярного напряжения питания выходной сигнал размахом 5 вольт может иметь отрицательную или положительную полярность.
Функциональная схема датчика скорости и направления оборотов:
Электрическая схема преобразует сигнал от датчика Холла в выходной сигнал датчика скорости и направления вращения, обеспечивая достаточную нагрузочную способность по току. Для минимизации помех, воздействующих на кабель импульсного датчика, сопротивление приёмника сигнала должно быть небольшим. Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Упрощенная схема включения датчика Холла
Логические элементы усиливают сигнал Направление, поступающий от датчика Холла. Логические элементы управляют светодиодами оптронов, один из которых работает на замыкание, а другой на размыкание. При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
На входе принимающего устройства сигнал дешифруется перед измерением частоты.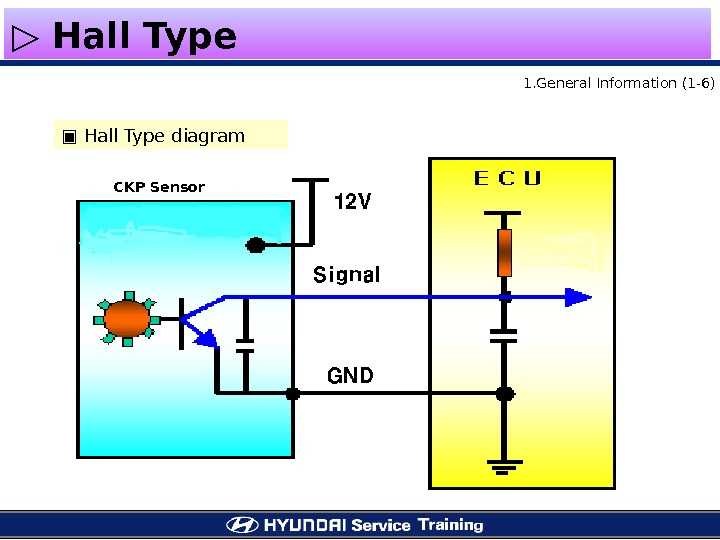 С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
Электрическая схема датчика скорости и направления оборотов
Рассмотренный порядок работы реализован в электрической схеме датчика скорости и направления вращения. Сигнал Направление поступает с выхода D микросхемы, использующей эффект Холла, DA2. Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной.
Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной. В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и Направление вращения, используя один компонент.
В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и Направление вращения, используя один компонент.
Радиодетали в схеме
Параметры импульсного датчика во многом обуславливают примененные компоненты его электрической схемы. Диапазон изменения напряжения питания, при котором способен работать датчик скорости и направления вращения обуславливает преобразователь напряжения DA1. Верхний предел измерения скорости вращения зависит от быстродействия оптрона VK1. Применение конденсаторов с наименьшим тангенсом угла потерь сочетание конденсаторов с различными типами диэлектрика использование последних разработок в области конденсаторов позволяет добиться наиболее высоких результатов. При чрезмерном увеличении емкости существует опасность “перегрузить” преобразователь напряжения DA1, что приведет к срабатыванию защиты по току в момент подачи питания и схема “не будет подавать признаков жизни”. При выборе типа оптореле VK1 оценивается его быстродействие и частота импульсов, поступающих на вход оптореле. Правильный выбор VK1 позволит уменьшить стоимость датчика. Микросхема DD1 выполняет функцию простейшего усилителя по току и может быть заменена другой микросхемой. Клемма XT1 предназначенная для монтажа на печатную плату, может быть заменена на другой элемент разъемного соединения.
При чрезмерном увеличении емкости существует опасность “перегрузить” преобразователь напряжения DA1, что приведет к срабатыванию защиты по току в момент подачи питания и схема “не будет подавать признаков жизни”. При выборе типа оптореле VK1 оценивается его быстродействие и частота импульсов, поступающих на вход оптореле. Правильный выбор VK1 позволит уменьшить стоимость датчика. Микросхема DD1 выполняет функцию простейшего усилителя по току и может быть заменена другой микросхемой. Клемма XT1 предназначенная для монтажа на печатную плату, может быть заменена на другой элемент разъемного соединения.
C1…C3 Конденсатор EMR 47 мкФ 50 В ф. Hitano
C4…C6 Конденсатор SMD 0805 2,2 мкФ 16 В
DA1 Преобразователь напряжения TMR 3-1221WI ф. Traco power
DA2 Микросхема SS526DT ф. Honeywell
DD1 Микросхема КР1533ЛН1
R1, R2 Резистор 300 Ом ±5%
R3, R4 Резистор 180 Ом ±5%
VK1 Оптореле 249КП10АР
ХТ1 Клемма LMI 107 203 51
Модифицирование импульсного датчика в зависимости от скорости вращения
Для различных применений требуется измерять различные диапазоны изменения скорости вращения, меняются требования к скорости определения смены направления вращения. Возможно применение датчика для скоростей 1 оборот в минуту и менее. При таких скоростях нужно увеличивать количество магнитов на диске, применять магниты с наименьшими габаритами и уменьшать зазор между микросхемой DA2 и плоскостью диска. Если скорости 5000 и более оборотов в минуту количество магнитов можно уменьшить. При этом наибольшая измеряемая скорость ограничена только конструктивными особенностями датчика. При уменьшении количества магнитов уменьшаются требования к наивысшей рабочей частоте компонентов схемы.
Возможно применение датчика для скоростей 1 оборот в минуту и менее. При таких скоростях нужно увеличивать количество магнитов на диске, применять магниты с наименьшими габаритами и уменьшать зазор между микросхемой DA2 и плоскостью диска. Если скорости 5000 и более оборотов в минуту количество магнитов можно уменьшить. При этом наибольшая измеряемая скорость ограничена только конструктивными особенностями датчика. При уменьшении количества магнитов уменьшаются требования к наивысшей рабочей частоте компонентов схемы.
Источник: http://mikrocxema.ru/
Датчик Холла: устройство и принцип работы
Когда американский физик Эдвин Холл открывал свой эффект взаимодействия электрического тока с магнитным полем, у него и в мыслях не было, что чаще всего его фамилия станет употребляться на автомобильных рынках в России. Удивительно, но факт — самые разные люди, весьма далёкие от физики, понятия не имеющие кто такой Холл, знают, что такое датчик Холла в автомобиле, и даже одно время страдали от их дефицита.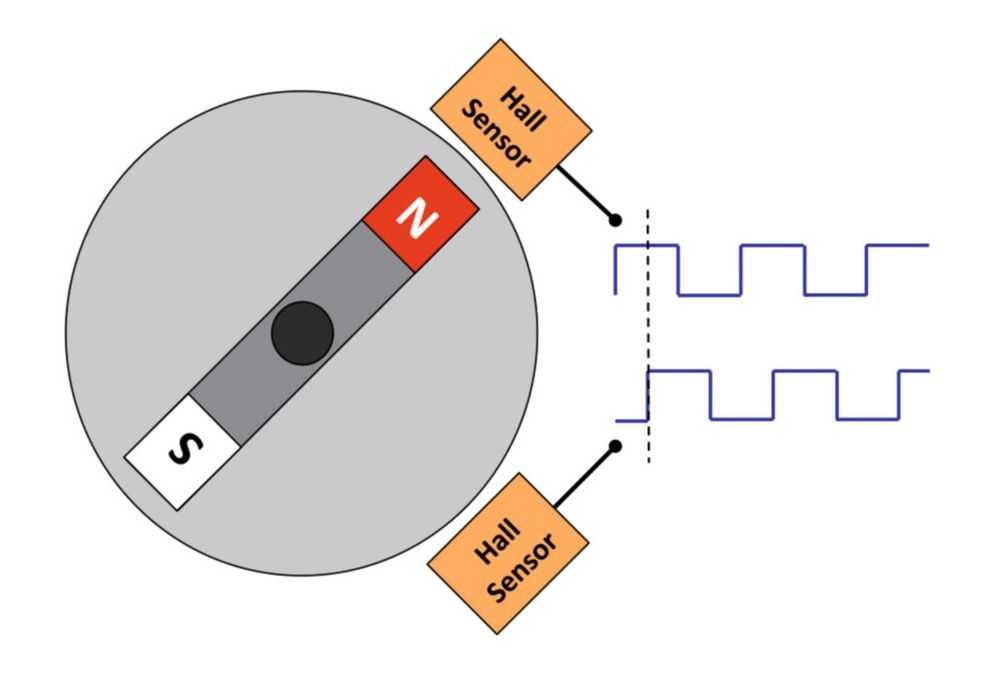
Содержание
В чём проявляется эффект Холла, и как это можно использовать в технике
Магнитное поле широко используется в автомобильной технике, несмотря на свою невидимость и неосязаемость. Даже свет, состоящий из электрических и магнитных полей, воспринимается благодаря своей электрической составляющей. Тем не менее, с помощью специальных магниточувствительных датчиков поле можно зафиксировать и даже измерить.
В основу одного из таких датчиков лёг эффект Холла, заключающийся в появлении поперечной разницы потенциалов на кристалле полупроводника, вдоль которого течёт ток. Образуется она только при помещении кристалла в магнитное поле, всё прочее пластину легированного кремния не поляризует. Это напряжение и подлежит фиксации, означая, что датчик попал в зону действия магнитного поля.
Собственно, всего этого недостаточно для использования кристалла в качестве датчика. Магнитное поле присутствует везде, надо определить его превышение над естественным фоном и помехами. Для этого к пластине подключается усилитель слабого сигнала и регулируемый пороговый элемент (компаратор). Вся схема выдаёт на выходе логический «0» по электрическому уровню, если поле есть, и логическую единицу во всех прочих случаях. Такая негативная логика обычно принята в цифровой технике. А чтобы в момент смены сигнала не наблюдалась «болтанка» выхода из-за неопределённости, устройство снабжается триггером Шмитта. Это такая схема, которая обеспечивает амплитудное запаздывание срабатывания (гистерезис), защищая от цифрового дребезга и помех в момент переключения, гарантируя одиночный крутой фронт сигнала и однозначность привязки во времени.
Для этого к пластине подключается усилитель слабого сигнала и регулируемый пороговый элемент (компаратор). Вся схема выдаёт на выходе логический «0» по электрическому уровню, если поле есть, и логическую единицу во всех прочих случаях. Такая негативная логика обычно принята в цифровой технике. А чтобы в момент смены сигнала не наблюдалась «болтанка» выхода из-за неопределённости, устройство снабжается триггером Шмитта. Это такая схема, которая обеспечивает амплитудное запаздывание срабатывания (гистерезис), защищая от цифрового дребезга и помех в момент переключения, гарантируя одиночный крутой фронт сигнала и однозначность привязки во времени.
Если бы всё перечисленное выполнялось на дискретных элементах, то датчик был бы размером с магнитолу, столько же стоил, работал ненадёжно и потреблял много электроэнергии. В реальности всё устройство датчика Холла выполняется методами интегральной микроэлектроники всё на том же полупроводниковом кристалле, который с лёгкой руки деятелей из Кремниевой долины давно уже принято называть чипом.
Сам датчик миниатюрен настолько, что его размерами можно пренебречь на фоне габаритов корпуса, электрического разъёма, подводящих проводов и вспомогательного постоянного магнита. Кристалл полностью заливается пластмассой для защиты от внешних воздействий, снаружи остаётся только разъём и полюс магнита. В зависимости от назначения, датчик может иметь прорезь, внутри которой будет проходить край задающего синхронизацию реперного диска с пазами.
Принцип работы датчика Холла в автомобилях состоит в том, что при появлении в рабочей зоне изменений магнитного поля, например, прорези реперного диска вместо его цельной части, или ступеньки на шкиве, или метки на фланце распредвала, сигнал на выходе сменит своё значение с нуля на единицу или наоборот. Таким образом, электронный блок, считывающий показания датчика, узнает о наступлении определённого момента во вращении вала, например, верхней мёртвой точки поршня определённого цилиндра или любого его положения относительно этой ВМТ, нужная информация задаётся разработчиками двигателя.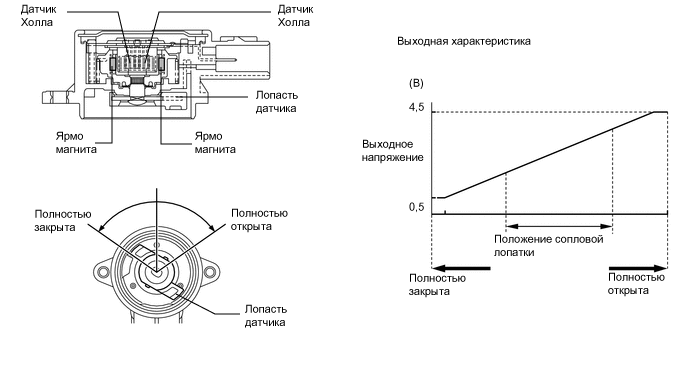 Это ложится в основу расчёта блоком управления двигателя таких важных данных, как момент зажигания, периодичность впрыска топлива, порядок открытия форсунок.
Это ложится в основу расчёта блоком управления двигателя таких важных данных, как момент зажигания, периодичность впрыска топлива, порядок открытия форсунок.
Читайте также: Вариатор в машине — принцип работы, плюсы и минусы
Разные случаи применения датчиков на эффекте Холла
Впервые такой датчик был использован на автомобилях с карбюраторными двигателями для замены контактов системы зажигания. Потом появились и другие применения магниточувствительных сенсоров.
Классическая батарейная система зажигания действует по принципу накопления энергии в магнитном поле катушки зажигания за счёт протекания тока по её первичной обмотке с последующим резким разрыванием цепи, что вызывает рост напряжения на вторичной обмотке и искровой разряд в свече. Контакты прерывателя при этом работают в крайне тяжёлых условиях, обгорают, изнашиваются и долго не живут. К тому же их возможности ограничивают рост мощности системы, а значит и работу двигателя с дальнейшим обеднением смеси для экономии горючего.
К тому же их возможности ограничивают рост мощности системы, а значит и работу двигателя с дальнейшим обеднением смеси для экономии горючего.
Проблему частично решило появление электронной бесконтактной системы зажигания с прерывателем на основе датчика Холла (ДХ). Здесь уже нет обгорающих и требующих регулировки зазора контактов, имеется лишь реперный диск, вращающийся в прорези датчика. Пока мимо магнита ДХ проходит цельная стенка диска, коммутатор зажигания, представляющий собой простой усилитель тока, управляемый сигналом ДХ, отдыхает, то есть ждёт момента начала накопления энергии. По переднему фронту прорези выходной ключ коммутатора открывается, начинается накопление энергии в катушке.
Ток увеличивается не до бесконечности. Выйдя на расчётную номинальную величину порядка полутора десятков ампер, он стабилизируется, а в момент появления второго края прорези датчик срабатывает, ключ размыкается, начинается рост напряжения на обмотках катушки вплоть до пробоя искрового зазора.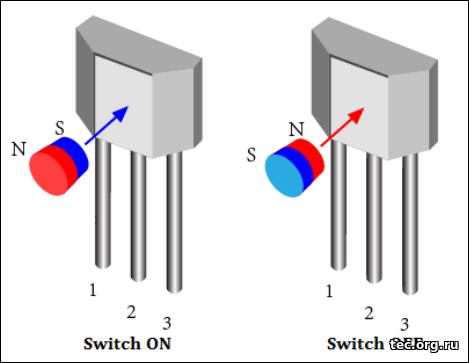
Датчик Холла здесь полностью оправдывает свои способности, он очень точно и стабильно задаёт моменты срабатывания всех элементов системы, а значит и ровную работу двигателя без пропусков зажигания и детонации. Сам ДХ при этом не изнашивается, служит теоретически вечно, избавляя водителей и ремонтников от всех неприятностей классического контактного прерывателя-распределителя (трамблёра). И только бракованные детали, а также мнительность заставляли людей покупать датчики для проверки и впрок, создавая дефицит, о котором было упомянуто ранее.
В качестве датчика положение коленчатого вала (ДПКВ)Чаще всего здесь используется простейший и надёжный индуктивный ДПКВ. Это обычная катушка с тонким проводом, намотанная на постоянный магнит. Мимо неё проходит зубчатый венец шкива коленвала, на котором один зубец отсутствует. Выходной сигнал представляет собой последовательность импульсов переменного тока, один из которых имеет увеличенную длительность и амплитуду. Компьютеру электронного блока управления двигателем (ЭБУ) не составит труда, располагая такой временной диаграммой, привязать все процессы во времени к фазам положения коленвала.
Компьютеру электронного блока управления двигателем (ЭБУ) не составит труда, располагая такой временной диаграммой, привязать все процессы во времени к фазам положения коленвала.
Однако некоторых разработчиков подобная простота не устраивала, возможно, им хотелось большей точности, поэтому в качестве датчика они использовали всё тот же ДХ. Принцип работы здесь такой же, зубцы задающего шкива замыкают и размыкают магнитный поток через датчик, изменяя его выходной цифровой сигнал. Получается последовательность импульсов, по форме несколько другая, но несущая в точности ту же самую информацию и выполняющая те же цели. Это основной и самый главный датчик двигателя, единственный, без которого мотор даже не заведётся, поэтому датчик Холла это то, что здесь нужно, повышенная надёжность тут очень кстати.
Выдача сигналов о положении распределительного вала
Очень хорошо датчику Холла подходит ещё одна работа, для которой он часто используется.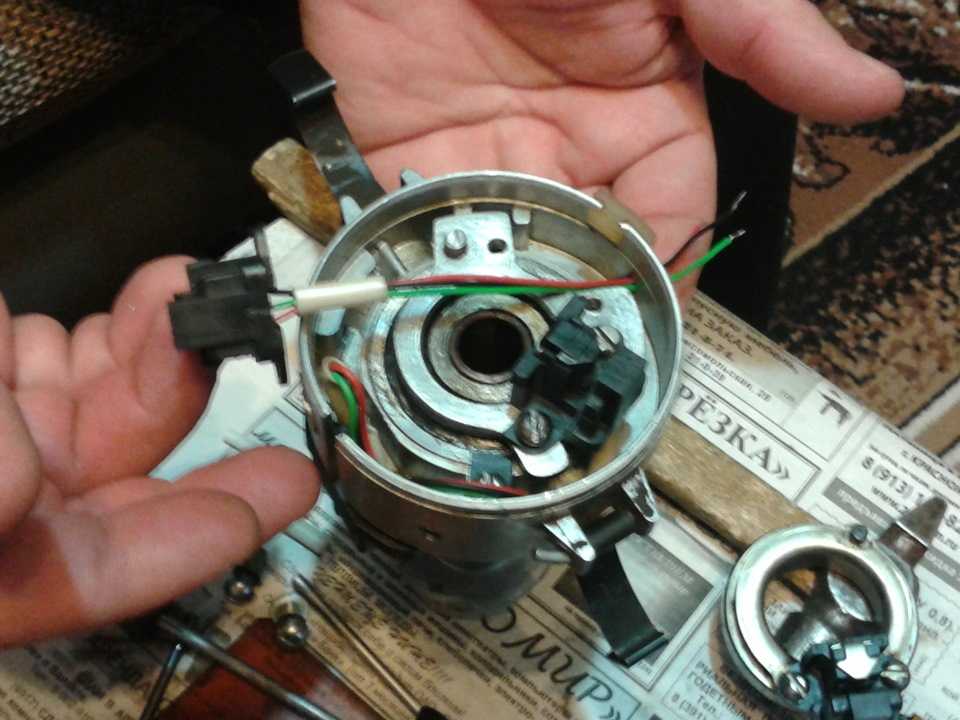 Это синхронизация фазированного многоточечного впрыска топлива.
Это синхронизация фазированного многоточечного впрыска топлива.
Вообще, системы впрыска могут быть самыми различными:
- одноточечные, или моновпрыск, не сильно отличается от карбюратора, имеется один центральный модуль, где форсунка распыляет бензин во впускной коллектор, откуда он равномерно, или не очень, всасывается цилиндрами;
- многоточечный, здесь на каждый цилиндр приходится своя форсунка, срабатывающая после окончания такта выпуска, чтобы подготовить смесь к впуску;
- многоточечный фазированный, для его реализации как раз и потребуется датчик Холла.
Недостатком обычного впрыска является отсутствие его точной синхронизации с моментом начала впуска в конкретный цилиндр. Дело в том, что информация для ЭБУ приходит с датчика коленвала, а по его положению невозможно точно засечь конкретный такт в цилиндре, ведь полный цикл требует двух оборотов вала, которые с точки зрения ДПКВ абсолютно одинаковые и ничем не различаются. Поэтому впрыск будет происходить два раза за цикл, причём один раз совершенно бесполезно, на закрытый перед рабочим ходом впускной клапан.
Для совершенствования системы был применён датчик положения распредвала, разумеется, на эффекте Холла. Конструкция уже известна, дисковый репер и магнитный ДХ с выходом на ЭБУ. Теперь блок управления точно знает, как отличить ВМТ сжатия от ВМТ выпуска и каждая форсунка откроется строго в нужный момент. У бензина не будет времени, чтобы бесполезно оседать на стенках коллектора.
Читайте также: Что такое коробка передач DSG
Как проверяют ДХ при возникновении подозрений
Устройство это очень надёжное, но абсолютной защиты от неисправности не существует. Поэтому иногда приходится проверять и эти датчики.
- Самое простое — подменить ДХ на заведомо исправный. Это избавит от возни со щупами, пробниками и осциллографами. А стоит датчик недорого, его всегда полезно иметь в запасе если не для замены, то именно для проверки забарахлившей системы впрыска или зажигания.
- Люди, знающие принцип действия датчика Холла, могут проверить его простейшими и не очень приборами.

- Слово «почти» было употреблено в том смысле, что точно убедиться в исправности можно лишь с помощью цифрового запоминающего осциллографа, который имеется у многих диагностов как приставка к ноутбуку. С его применением можно проверить параметр, который недоступен щупам — быстродействие датчика. Фронты напряжения должны быть достаточно крутыми, что осциллограф и покажет. «Заваленный» фронт может оказаться тем самым случаем, когда датчик вроде работает, и пробник или мультиметр это подтверждают, а система сбоит и светит ошибки.
Почти все случаи, поясняющие, что такое датчик Холла в автомобиле, рассмотрены, остаётся упомянуть вполне возможное менее явное присутствие этих небольших приборов в автоэлектронике. Многие машины оснащаются достаточно мощными электродвигателями, где также для работы силовой электроники используются датчики Холла, следящие за положением ротора в магнитном поле. И даже этим, возможно, проникновение ДХ в авто не заканчивается. Компактный, надёжный и точный прибор всегда найдёт себе область работы во всё больше обрастающем электроникой современном автомобиле.
Многие машины оснащаются достаточно мощными электродвигателями, где также для работы силовой электроники используются датчики Холла, следящие за положением ротора в магнитном поле. И даже этим, возможно, проникновение ДХ в авто не заканчивается. Компактный, надёжный и точный прибор всегда найдёт себе область работы во всё больше обрастающем электроникой современном автомобиле.
Вам также будет интересно почитать:
Датчики положения (индуктивный датчик, датчик Холла)
Датчики положения (индуктивный датчик, датчик Холла) |
Для измерения скорости вращения и определения положения различных узлов двигателя используются датчики положения.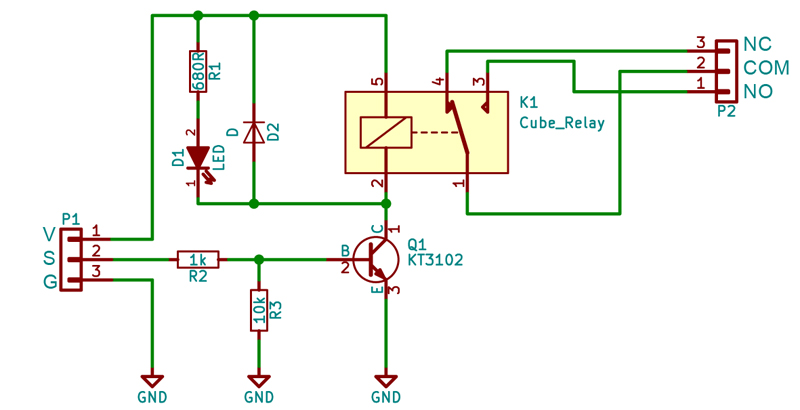 К ним относятся: датчик положения коленчатого вала (ДПКВ), датчик положения распределительного вала (ДПРВ) или датчик фазы (ДФ), датчик скорости (ДС), датчики ABS.
К ним относятся: датчик положения коленчатого вала (ДПКВ), датчик положения распределительного вала (ДПРВ) или датчик фазы (ДФ), датчик скорости (ДС), датчики ABS.
Сигнал ДПКВ используется для определения частоты вращения КВ, а также его мгновенного положения. Т.к. частоты вращения распределительного и коленчатого валов соотносятся как 1:2, то только по сигналу ДПКВ невозможно однозначно определить находится ли поршень двигателя, движущийся к ВМТ, на такте сжатия или выпуска. Фазный датчик на распределительном валу передает эту информацию в блок управления.
Сигналы ДПКВ (синий) и ДПРВ (зеленый)
К наиболее распространенным типам этих датчиков относятся: индуктивный (электромагнитный) датчик и датчик Холла.
Индуктивный датчик
Этот тип датчика наиболее распространен в качестве ДПКВ. Датчик монтируется поблизости от подвижного элемента, называемого маркерным диском. Этот элемент представляет собой стальной диск с зубьями, который жестко зафиксирован на коленчатом валу (может находиться как со стороны ременной передачи, так и непосредственно на маховике КВ).
Этот элемент представляет собой стальной диск с зубьями, который жестко зафиксирован на коленчатом валу (может находиться как со стороны ременной передачи, так и непосредственно на маховике КВ).
Расположение ДПКВ
1. ДПКВ
2. Маркерный диск
3. Разъем датчика
Датчик состоит из обмотки с сердечником из постоянного магнита. Когда зуб проходит перед датчиком, это приводит к усилению магнитного потока, проходящего через обмотку. Напротив, увеличение зазора ослабляет этот поток. Происходит изменение магнитного поля, которое вызывает появление индукционного тока в обмотке. Амплитуда напряжения переменного тока сильно возрастает по мере повышения частоты вращения маркерного диска (от нескольких мВ до значений более 100 В).
Конструкция индуктивного датчика
1. Обмотка
2. Метка на маркерном диске в виде пропущенных зубьев
3. Постоянный магнит
Маркерный диск может иметь как пропуски зубьев, так и более широкие зубья.
Кол-во зубьев маркерного диска зависит от его назначения и модели авто. В качестве маркерного диска для КВ наиболее распространенным является диск с 60-ю зубьями, при этом два зуба пропущены. Зазор с пропущенными зубьями предназначен для отметки определенного положения коленчатого вала и служит как установочная метка для синхронизации блока управления.
Пример сигнала индуктивного датчика ABS
В варианте исполнения для ДПРВ, маркерный диск может иметь всего один зуб, т.к. в данном случае нет необходимости измерять скорость вращения, нужно определить только положение РВ для определения фазы работы двигателя.
Для дальнейшего анализа электронный блок производит преобразование аналогового сигнала в цифровой. Амплитуда напряжения сигнала пропорциональна скорости прохождения подвижной детали перед датчиком.
Индуктивный датчик подключается к контроллеру экранированной парой проводов с заземлением экранирующей оплетки на кузов автомобиля.
Пример схемы подключения ДПКВ
Для записи осциллограммы индуктивного датчика, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему со стороны ЭБУ.
Подключение мотор-тестера к ДПКВ (цветовая маркировка проводов указана в качестве примера)
Датчик Холла
В таких датчиках использован эффект Холла. Интегральная схема датчика Холла располагается между маркерным диском и постоянным магнитом.
Когда зуб маркерного диска проходит у элемента датчика, то он изменяет величину магнитного поля, пронизывающего элемент Холла. За счет этого возникает сигнал напряжения, который находится в милливольтновом диапазоне и не зависит от относительной скорости между датчиком и маркерным диском. Оценивающая электронная схема, встроенная в интегральную схему, вырабатывает сигнал в форме прямоугольных импульсов.
За счет этого возникает сигнал напряжения, который находится в милливольтновом диапазоне и не зависит от относительной скорости между датчиком и маркерным диском. Оценивающая электронная схема, встроенная в интегральную схему, вырабатывает сигнал в форме прямоугольных импульсов.
Датчик Холла
1.
Постоянный магнит
2.
Интегральная схема Холла.
3.
Маркерный диск
4.
Разъем датчика
Как правило, датчик Холла имеет три вывода: питание +5В (+12В), «земля», сигнальный выход.
Пример схемы подключения ДПРВ
Для записи осциллограммы датчика Холла, необходимо подключиться измерительным щупом непосредственно к сигнальному выходу датчика либо к разъему ЭБУ.
Подключение мотор-тестера к ДПРВ (цветовая маркировка проводов указана в качестве примера)
Для записи сигнала ДПКВ рекомендуется использовать 2ой аналоговый канал мотор-тестера, для сигнала ДПРВ — 3ий канал. При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
При наличии нескольких ДПРВ, можно использовать любой свободный аналоговый канал.
Настройка аналогового канала для индуктивного датчика
Настройка аналогового канала для датчика Холла
Дополнительные возможности ПО:
Автоподстройка линейки по любому «стандартному ДПКВ» (тема на форуме)
Одновременный анализ сигналов ДПКВ и ДПРВ позволяет проверить работу этих датчиков, а также правильность установки КВ и РВ (соответствие меток ГРМ).
автор: Евгений Куришко
Feedback from a Hall Effect Sensor With Video
Датчик эффекта Холла
Датчики на эффекте Холла могут обнаруживать наличие магнитного поля и генерировать выходное напряжение при его обнаружении. Датчики на эффекте Холла при использовании слинейные приводы, как правило, расположены внутри коробки передач привода вместе с магнитным диском. Когда линейный привод выдвигается или втягивается, этот диск вращается, проходя мимо датчика Холла, что заставляет датчик вырабатывать цифровой выходной сигнал в виде импульса напряжения. Эти импульсы можно подсчитать и использовать для определения того, насколько далеко сдвинулся привод.
Когда линейный привод выдвигается или втягивается, этот диск вращается, проходя мимо датчика Холла, что заставляет датчик вырабатывать цифровой выходной сигнал в виде импульса напряжения. Эти импульсы можно подсчитать и использовать для определения того, насколько далеко сдвинулся привод.
Позиционная обратная связь от датчика Холла
Обратной стороной использования датчика Холла для позиционной обратной связи является то, что они не измеряют абсолютное положение. Вместо этого они производят импульсы, которые можно подсчитать, чтобы определить, насколько далеко сдвинулся привод. Чтобы использовать эти импульсы для позиционной обратной связи, вам понадобится микроконтроллер для подсчета произведенных импульсов. Для этого вам необходимо использовать внешние контакты прерывания вашего микроконтроллера для подсчета этих импульсов по мере их возникновения. Внешние прерывания — это выводы, которые обнаруживают изменение напряжения и в нашем случае могут использоваться для обнаружения импульса напряжения от датчика Холла.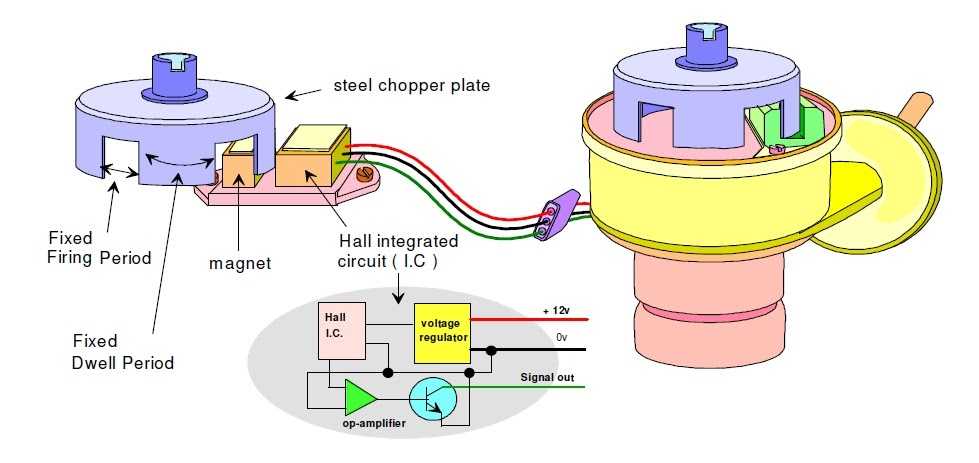 Вам нужно будет свериться с таблицей данных вашего микроконтроллера, чтобы убедиться, какие выводы вашего микроконтроллера можно использовать в качестве контактов прерывания. Используя Ардуино Уно например, контакты 2 и 3 могут использоваться для внешних прерываний. После того, как вы выбрали соответствующий контакт прерывания, вы можете подключить провод выхода датчика Холла к этому контакту, а также подключить входное напряжение к 5 В и заземление к контакту заземления.
Вам нужно будет свериться с таблицей данных вашего микроконтроллера, чтобы убедиться, какие выводы вашего микроконтроллера можно использовать в качестве контактов прерывания. Используя Ардуино Уно например, контакты 2 и 3 могут использоваться для внешних прерываний. После того, как вы выбрали соответствующий контакт прерывания, вы можете подключить провод выхода датчика Холла к этому контакту, а также подключить входное напряжение к 5 В и заземление к контакту заземления.
В приведенном ниже примере кода показано, как настроить прерывание в среде Arduino IDE, при котором прерывание будет срабатывать по нарастающему фронту импульса напряжения. Вы можете настроить прерывание так, чтобы оно срабатывало в разных точках изменения напряжения, и вам следует обратиться к таблице данных вашего микроконтроллера, чтобы определить доступные варианты. Последний аспект, который вам нужно сделать для настройки вашего прерывания, — это написать вашу подпрограмму обслуживания прерывания, которая является функцией, которую код будет запускать каждый раз при запуске прерывания. Эта функция должна быть короткой и выполнять только простые задачи, такие как подсчет количества импульсов от нашего датчика Холла. Функция countSteps () в приведенном ниже примере кода используется для подсчета количества импульсов от датчика Холла.
Эта функция должна быть короткой и выполнять только простые задачи, такие как подсчет количества импульсов от нашего датчика Холла. Функция countSteps () в приведенном ниже примере кода используется для подсчета количества импульсов от датчика Холла.
Чтобы использовать эти импульсы для определения позиционного значения, вам необходимо знать предыдущее положение линейного привода и направление, в котором движется линейный привод. Ваш микроконтроллер уже будет знать, в каком направлении вы управляете линейным приводом, поэтому вы можете просто настроить переменную для отслеживания направления привода в вашем коде, которая будет использоваться для определения того, добавляете ли вы импульсы из вашего предыдущего положения или вычитаете. После того, как вы обновите свое местоположение, вам нужно будет сбросить счетчик импульсов на ноль. В приведенном ниже примере кода показана функция, которая обновляет положение в зависимости от количества подсчитанных импульсов. Как только у вас есть положение в импульсах, вы можете преобразовать их в дюймы, используя спецификацию импульсов на дюйм вашего линейного привода. В приведенном ниже примере кода количество импульсов на дюйм хода составляет 3500.
В приведенном ниже примере кода количество импульсов на дюйм хода составляет 3500.
Перемещение вашего линейного привода в исходное положение
Чтобы точно использовать позиционную обратную связь от датчика Холла, вам всегда нужно знать начальное положение вашего линейного привода. Хотя, когда вы впервые включаете свою систему, ваш микроконтроллер не сможет определить, выдвинут ли привод или нет. Это потребует от вас вернуть линейный привод в известное положение. Чтобы вернуть линейный привод в исходное положение, вам нужно будет установить его в известное положение, например, полностью втянуть. Вы также можете использовать внешние концевые выключатели для установки вашего известного положения в другое место, кроме полностью выдвинутого или втянутого. Используя приведенный ниже код Arduino в качестве примера, мы захотим настроить цикл WHILE, который будет приводить наш линейный привод к вашему известному положению, в данном случае полностью втянутому. Мы знаем, что вы находитесь в известной нам позиции, потому что датчик Холла не сработает. В этом случае мы проверяем, изменилась ли переменная steps, чтобы определить, было ли запущено прерывание. Нам также необходимо убедиться, что прошло достаточно времени, чтобы ожидать срабатывания прерывания, для этого мы используем функцию millis (), которая выводит время в миллисекундах с момента запуска кода, и мы сравниваем это с предыдущей отметкой времени. . Как только мы определили, что линейный привод находится в нашем исходном положении, мы останавливаем привод, сбрасываем переменную шагов и выходим из цикла WHILE.
В этом случае мы проверяем, изменилась ли переменная steps, чтобы определить, было ли запущено прерывание. Нам также необходимо убедиться, что прошло достаточно времени, чтобы ожидать срабатывания прерывания, для этого мы используем функцию millis (), которая выводит время в миллисекундах с момента запуска кода, и мы сравниваем это с предыдущей отметкой времени. . Как только мы определили, что линейный привод находится в нашем исходном положении, мы останавливаем привод, сбрасываем переменную шагов и выходим из цикла WHILE.
Работа с ложными триггерами
Хотя датчики на эффекте Холла не так чувствительны к электрическому шуму, как потенциометр, электрический шум все же может влиять на выходной сигнал. Подскакивание переключателя также может быть проблемой с датчиками Холла, которые могут запускать подсчет ложных импульсов, что может повлиять на то, как далеко, по мнению вашего микроконтроллера, переместился линейный привод. Несколько дополнительных импульсов не сильно повлияют на позиционирование, так как на дюйм приходится 1000 импульсов, но со временем это может стать более серьезной проблемой.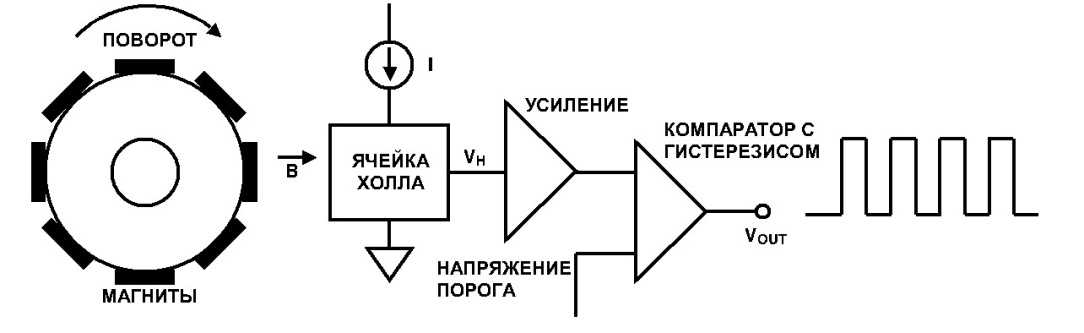 Вы можете бороться с этими проблемами, используя внутренний таймер для фильтрации ложных срабатываний. Поскольку вы можете определить ожидаемую частоту обнаружения новых импульсов, вы можете отфильтровать случаи, когда прерывание было вызвано шумом. В примере кода ниже trig-Delay — это временная задержка между каждым импульсом. Если прерывание было инициировано до этой задержки, то импульс не будет засчитан.
Вы можете бороться с этими проблемами, используя внутренний таймер для фильтрации ложных срабатываний. Поскольку вы можете определить ожидаемую частоту обнаружения новых импульсов, вы можете отфильтровать случаи, когда прерывание было вызвано шумом. В примере кода ниже trig-Delay — это временная задержка между каждым импульсом. Если прерывание было инициировано до этой задержки, то импульс не будет засчитан.
Продолжительность этой задержки будет варьироваться в зависимости от вашего приложения, но если она слишком короткая, она не отфильтрует шум должным образом, а если она слишком длинная, то будут пропущены фактические импульсы от линейного привода. Скорость линейного привода также будет влиять на эту задержку, и если вы хотите отрегулировать скорость, может потребоваться изменить эту переменную, чтобы отрегулировать новую частоту ожидаемых импульсов. Чтобы точно определить точную задержку между каждым импульсом, вы можете использовать логический анализатор для просмотра фактического сигнала с датчика Холла. Хотя это не требуется в большинстве приложений, если вам требуется очень точное позиционирование, вы можете определить точную задержку.
Хотя это не требуется в большинстве приложений, если вам требуется очень точное позиционирование, вы можете определить точную задержку.
Другой способ борьбы с ложными срабатываниями — корректировка значения положения каждый раз, когда привод достигает известного положения. Подобно перемещению в исходное положение линейного привода, если вы перевели линейный привод в полностью втянутое или выдвинутое положение или если вы используете внешние концевые выключатели, вы узнаете, как далеко сдвинулся привод. Поскольку вы знаете, сколько шагов должен отправить датчик Холла, чтобы достичь вашего известного положения, вы можете просто скорректировать значение, когда мы его достигнем. В приведенном ниже примере кода это сделано для полностью выдвинутых и полностью убранных позиций. Поскольку исполнительный механизм не перемещается, когда он достигает одного из этих положений, если мы попытаемся привести в действие исполнительный механизм, а значение положения не изменится, мы будем знать, что достигли предела.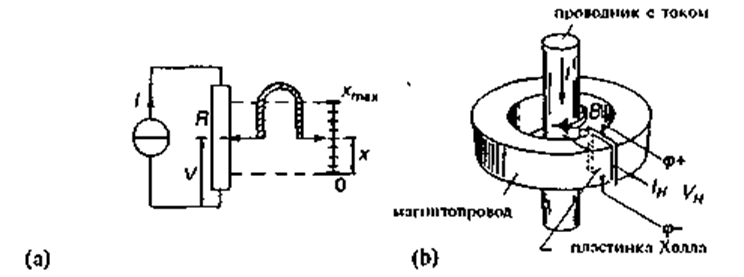 Этот метод обеспечивает практическое решение для обеспечения точности вашего позиционного значения, особенно если вы полностью втягиваете или полностью выдвигаете свой привод в какой-то момент во время работы. Вы можете использовать этот метод вместе с методом, описанным выше, который должен помочь поддерживать точность вашего позиционного значения.
Этот метод обеспечивает практическое решение для обеспечения точности вашего позиционного значения, особенно если вы полностью втягиваете или полностью выдвигаете свой привод в какой-то момент во время работы. Вы можете использовать этот метод вместе с методом, описанным выше, который должен помочь поддерживать точность вашего позиционного значения.
Резюме
Использование датчика Холла для позиционной обратной связи обеспечивает гораздо большее разрешение по сравнению с обратной связью от потенциометра. Поскольку на дюйм перемещения может приходиться 1000 импульсов, датчики на эффекте Холла обеспечивают точность и надежность позиционирования вашего линейного привода. Датчики на эффекте Холла также обеспечивают большую способность обеспечивать одновременное движение нескольких линейных приводов, поскольку счетчик импульсов более точен, чем изменение напряжения потенциометра. Используя наши FA-SYNC-X контроллер привода, вы даже можете обеспечить синхронное движение приводов независимо от нагрузки. Для домашних мастеров вы можете проверить, как обеспечить синхронное движение ваших приводов, используя Arduino. Вот.
Для домашних мастеров вы можете проверить, как обеспечить синхронное движение ваших приводов, используя Arduino. Вот.
Ниже приведен полный пример кода, который используется в этом блоге и предназначен для управления длиной хода 14 дюймов. Bullet Series 36 Cal. Линейный привод. Линейный привод приводится в действие с помощью водитель мотора, который вы можете узнать, как настроить Вот.
[1] Монари, Г. (июнь 2013 г.) Понимание разрешения в оптических и магнитных энкодерах. Полученное из: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
Устройство, принцип работы датчика Холла, его применение в автомобиле
Сегодня роль электроники в автомобилестроении трудно переоценить. Автоматика оперативно контролирует и управляет всеми агрегатами современного автомобиля, обеспечивая их максимальную эффективность при высокой надёжности.
Но это возможно только при наличии достаточного количества датчиков, сообщающих электронному блоку управления множество различных параметров для выработки управляющих сигналов.
Одно из таких устройств в современном двигателе – датчик Холла. Принцип его функционирования основан на эффекте отклонения электронов в проводнике под воздействием силы Лоренса, возникающей при взаимодействии магнитного поля с движущимися заряженными частицами.
Если через две стороны плоского прямоугольного проводника помещённого плоскостью перпендикулярно силовым магнитным линиям пропускать электрический ток, то в результате их взаимодействия с электронами на двух других сторонах прямоугольника появляется электрический потенциал.
Причём сторона, куда отклоняются электроны, зависит от направления силовых магнитных линий. В результате этого эффекта создаётся плюсовой и минусовой полюс выходного потенциала.
Величина его небольшая – до 100 милливольт, и зависит от силы протекающего тока и напряжённости поля. Но этого вполне достаточно для того, чтоб электронная схема смогла его зарегистрировать.
Добавление к чувствительному элементу полупроводниковой схемы позволило создать компактный прибор, свободный от недостатков контактного прерывателя, создающего так называемый «дребезг» во время замыкания или размыкания. Благодаря сравнительно низкой цене при небольших размерах датчики Холла применяются весьма широко.
Благодаря сравнительно низкой цене при небольших размерах датчики Холла применяются весьма широко.
Например, для бесконтактного измерения тока, индикации или измерения уровня магнитного поля, а также в ноутбуках либо телефонах-раскладушках для отключения питания при закрывании крышки.
В автомобилестроении датчики Холла используются преимущественно для определения положения коленчатого вала, при котором следует подавать высоковольтный импульс создающий разряд на свече зажигания.
РАЗНОВИДНОСТИ ДАТЧИКОВ ХОЛЛА
По типу исполнения датчики бывают:
- аналоговыми;
- дискретными.
Первый тип просто генерирует двухполярный потенциал, пропорциональный напряженности и направлению магнитного поля, либо однополярный, показывая лишь его абсолютное значение. Подобные аналоговые приборы используют как измерительные.
Дискретные (цифровые) датчики разделяются на однополярные, включающиеся или выключающиеся при наличии либо отсутствии магнитного поля, и биполярные, реагирующие включением на один полюс, и выключением на другой полюс магнита.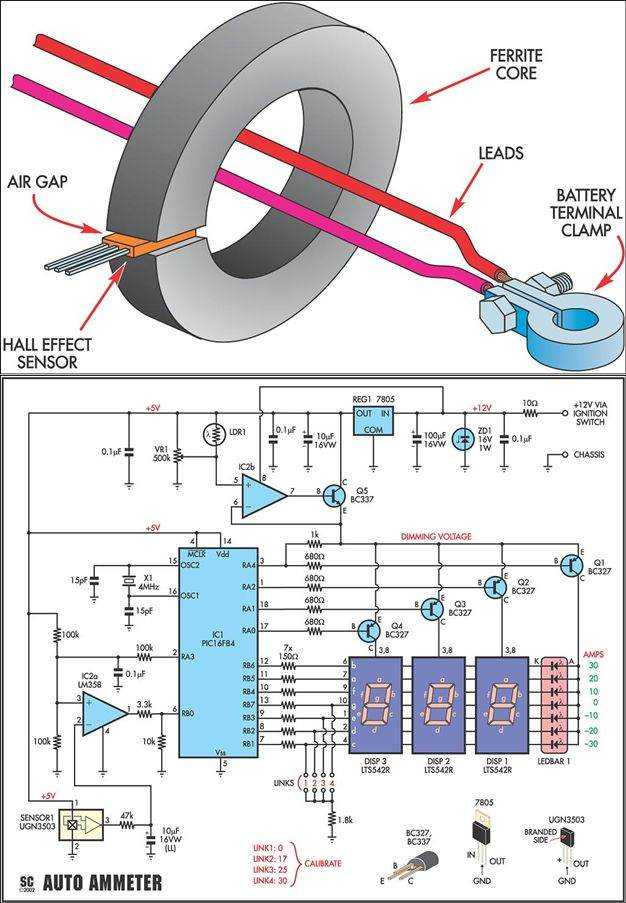
Как правило, автомобильный датчик Холла состоит из постоянного магнита, находящегося на определённом расстоянии от чувствительного элемента, и микросхемы, усиливающей сигнал с него. Ротор из ферромагнетика (сталь, железо), своими лопастями периодически перекрывают магнитное поле между магнитом и чувствительным элементом.
Если поле не перекрыто ротором, микросхема генерирует сигнал единицы, близкий по напряжению к питающему уровню бортовой сети. Когда лопасть ротора перекрывает магнитное поле, сигнал на выходе микросхемы близок к нулю.
В системах зажигания, используются цифровые датчики с высокой стабильностью включения, непосредственно коммутирующие напряжение питания. По сравнению с обыкновенными контактными прерывателями датчики Холла характеризуются повышенной чувствительностью к электромагнитным помехам, что устраняется помещением их в магнитный экран из магнитомягкого материала (пермаллоя).
Электронная схема также несколько снижает его надёжность. Но всё это окупается высочайшей стабильностью срабатывания, а значит момента зажигания и возможностью качественной его регулировки.
Но всё это окупается высочайшей стабильностью срабатывания, а значит момента зажигания и возможностью качественной его регулировки.
КАК БЫСТРО ПРОВЕРИТЬ ДАТЧИК ХОЛЛА
Иногда в процессе эксплуатации возникают неисправности, требующие проверки работоспособности датчика Холла. Вот типовые признаки подобных дефектов:
- мотор плохо запускается, вообще не заводится или самопроизвольно глохнет;
- обороты коленчатого вала нестабильны, заметны рывки при работе.
Способов проверки существует несколько:
1. Простейший – заменить на заведомо исправный прибор. Не слишком эон дорог, чтобы было накладно всегда при себе иметь запасной.
2. Мультиметром в режиме вольтметра. Датчик при этом должен быть стандартно подключен к массе (клемма «-» аккумулятора) и клемме «+» аккумулятора. Для проверки подключают щупы вольтметра к общему проводу и сигнальному контакту датчика.
Перекрывая зазор датчика куском железной или стальной пластины, например, лезвием ножа наблюдаем за показаниями вольтметра. При отсутствии пластины напряжение должно быть равно примерно 0,4 В, при наличии – 11 В.
При отсутствии пластины напряжение должно быть равно примерно 0,4 В, при наличии – 11 В.
Более сложные способы проверки для любителей не подходят , посему они здесь не приводятся, а для специалистов подобные описания излишни.
* * *
© 2014-2022 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер, могут выражать мнение автора и не подлежат использованию в качестве руководящих и нормативных документов.
Некоторые применения линейных интегральных датчиков Холла компании Allegro Microsystems
Интегральные датчики Холла находят применение во многих областях современной промышленности, например в машиностроении, автомобильной электронике, авиационной технике. В отличие от механических и оптических датчиков, датчики Холла обладают важным преимуществом — они практически нечувствительны к механическим воздействиям и изменению параметров окружающей среды, при этом обеспечивают минимизацию стоимости готового решения.
Введение
Наибольшее распространение получили так называемые ключевые датчики Холла — микросхемы, выход которых меняет логическое состояние при превышении напряженностью магнитного поля определенной величины. Такие датчики применяются, в частности, для измерения частоты вращения и величины перемещения движущихся объектов — валов электродвигателей, зубчатых колес редукторов, транспортерных лент и т. п. Однако существует отдельный класс интегральных микросхем с элементом Холла, позволяющий значительно расширить область применения либо дать разработчику большую гибкость при построении системы в традиционных областях применения. Речь идет о так называемых линейных датчиках Холла. В данной статье мы рассмотрим основные характеристики и области применения этих устройств.
Структура и основные характеристики линейных датчиков Холла
Линейные датчики Холла (ЛДХ) обычно оптимизируют для измерения величины униполярного или биполярного магнитного поля. ЛДХ характеризуются двумя основными параметрами — чувствительностью и линейностью в заданном диапазоне рабочих температур.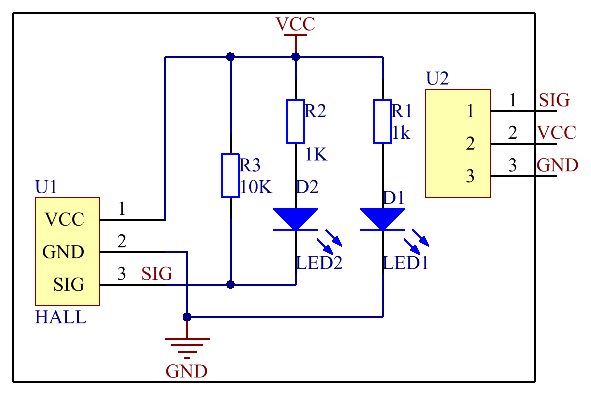
Рис. 1
Типовая передаточная характеристика ЛДХ (зависимость выходного напряжения от амплитуды магнитного поля) показана на рис. 1. Большинство датчиков с однополярным питанием имеют выходное напряжение нуля (соответствующее нулевой напряженности магнитного поля), равное половине диапазона изменения выходного напряжения или половине напряжения питания. В последнем случае величина напряжения нуля и чувствительность зависят от величины напряжения питания. Это наблюдается в датчиках с пропорциональным выходом, представляющих собой элемент Холла с линейным усилителем (рис. 2). Так, у популярного датчика A3515 при напряжении питания +5,0 В напряжение нуля и чувствительность равны 2,5 В и 5,0 мВ/Гаусс соответственно, а при увеличении питания до 5,5 В данные параметры изменяются до значений 2,75 В и 5,5 мВ/Гаусс. Вот почему при использовании ЛДХ этого типа необходимо предъявлять более жесткие требования к источнику питания. В то же время датчики позволяют осуществить простую регулировку чувствительности без дополнительных усилительных компонентов, что может быть весьма полезно.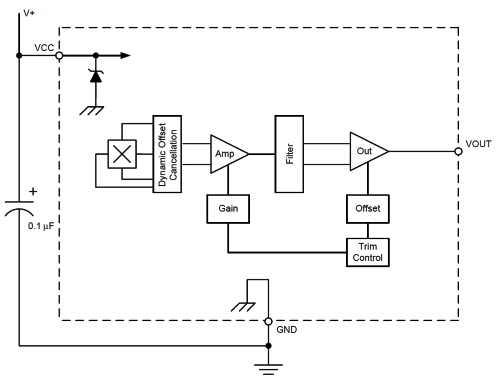
Рис. 2
Современные ЛДХ представляют собой монолитную интегральную схему, где на одном кристалле объединены элемент Холла, линейный усилитель и оконечный каскад усиления мощности класса А (рис. 3). Кроме того, для увеличения точности преобразования и обеспечения температурной стабильности в микросхеме реализована система автоматической коррекции напряжения смещения и фильтрация сигнала после линейного усилителя.
Рис. 3
Таблица 1. Номенклатура новых линейных датчиков Холла компании Allegro Microsystems
В таблице 1 приведена номенклатура новых линейных датчиков Холла компании Allegro Microsystems. Датчики А1301, А1302 имеют схему, показанную на рис. 3. Они обеспечивают невысокое значение точности и могут использоваться, например, в системах регистрации угловых или линейных перемещений объектов. На показатели точности и стабильности характеристик ЛДХ с одним элементом Холла может оказывать влияние множество факторов: дисбаланс градиентов сопротивления в зависимости от направления тока, геометрическая неоднородность, пьезорезистивные эффекты и даже внешние механические воздействия на корпус микросхемы. Для устранения влияния указанных факторов на точность ЛДХ используется схема динамической квадратурной компенсации смещения. Принцип ее работы иллюстрирует рис. 4. Токи элемента Холла с двух направлений (0° и 90°) поочередно коммутируются с частотой около 200 кГц на входы дифференциального усилителя, осуществляя «электронный поворот» элемента на 90°. При этом к моменту «поворота» схема выборки-хранения фиксирует напряжение на выходе усилителя, устраняя коммутационные помехи. Окончательно сигнал пропускается через ФНЧ для полного восстановления. Схемотехника динамической квадратурной компенсации позволяет практически полностью устранить влияние внешних дестабилизирующих факторов, а также добиться высокой стабильности выходного напряжения смещения. К недостаткам схемы можно отнести наличие в спектре выходного сигнала шумов в полосе частот коммутации Fком, что ограничивает максимальную частоту выходного сигнала датчика величиной, обычно равной 0,1–0,2 Fком.
Для устранения влияния указанных факторов на точность ЛДХ используется схема динамической квадратурной компенсации смещения. Принцип ее работы иллюстрирует рис. 4. Токи элемента Холла с двух направлений (0° и 90°) поочередно коммутируются с частотой около 200 кГц на входы дифференциального усилителя, осуществляя «электронный поворот» элемента на 90°. При этом к моменту «поворота» схема выборки-хранения фиксирует напряжение на выходе усилителя, устраняя коммутационные помехи. Окончательно сигнал пропускается через ФНЧ для полного восстановления. Схемотехника динамической квадратурной компенсации позволяет практически полностью устранить влияние внешних дестабилизирующих факторов, а также добиться высокой стабильности выходного напряжения смещения. К недостаткам схемы можно отнести наличие в спектре выходного сигнала шумов в полосе частот коммутации Fком, что ограничивает максимальную частоту выходного сигнала датчика величиной, обычно равной 0,1–0,2 Fком.
Рис.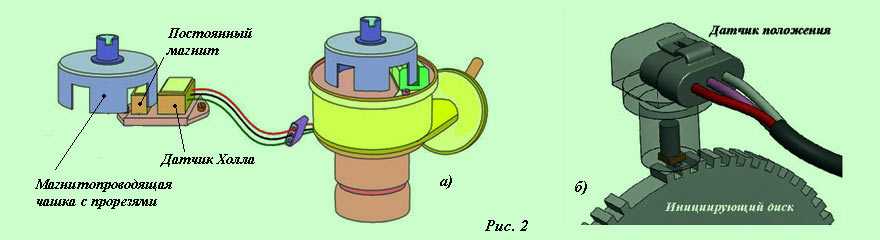 4
4
Описанный принцип компенсации смещения используется в датчиках А1321–А1323 (рис. 5). Эти изделия относятся к классу прецизионных калиброванных ЛДХ и сохраняют высокую точность и линейность преобразования в температурном диапазоне от –40 до +150 °С. Однако, как отмечалось выше, схемотехника динамической компенсации смещения приводит к увеличению шума на выходе датчика. Так, если у линейных датчиков А1301, А1302 амплитуда выходных шумов в полосе 10 кГц не превышает 150 мкВ, то у А1321–А1323 это значение оказывается уже на два порядка выше — около 25 мВ. Соответственно, при одинаковом коэффициенте преобразования 2,5 мВ/Гаусс разрешение по минимальной регистрируемой величине магнитного поля у А1301 составляет 0,06 Гаусс, а у А1323 — 10 Гаусс.
Рис. 5
Использование регулировки напряжения питания для масштабирования коэффициента преобразования ЛДХ приводит к ряду сложностей при проектировании схемы. Во-первых, резко возрастают требования к стабильности напряжения источника питания..jpg.c80f4af12afd0f133d1bfb811e56abca.jpg) Во-вторых, пульсации и шумы питающего напряжения непосредственно модулируют выходной сигнал датчика, оказывая влияние на точность измерения, что требует применения сложной фильтрации, а значит, намного удорожает схему. От подобных недостатков свободны датчики нового поколения А1391, А1392 (рис. 6). Эти микросхемы имеют отдельный вход образцового напряжения масштабирования VREF, с помощью которого можно задать любое значение уровня нуля и коэффициента преобразования. При этом схема обеспечивает глубину подавления помех по напряжению питания около 60 дБ. Стабилизация смещения выполнена аналогично А1321–А1323, однако амплитуда шумов снижена на 20%.
Во-вторых, пульсации и шумы питающего напряжения непосредственно модулируют выходной сигнал датчика, оказывая влияние на точность измерения, что требует применения сложной фильтрации, а значит, намного удорожает схему. От подобных недостатков свободны датчики нового поколения А1391, А1392 (рис. 6). Эти микросхемы имеют отдельный вход образцового напряжения масштабирования VREF, с помощью которого можно задать любое значение уровня нуля и коэффициента преобразования. При этом схема обеспечивает глубину подавления помех по напряжению питания около 60 дБ. Стабилизация смещения выполнена аналогично А1321–А1323, однако амплитуда шумов снижена на 20%.
Рис. 6
В датчиках А1391 и А1392 реализован режим электронного отключения по входу SLEEP. При подаче на этот вход логического нуля микросхема переходит в режим пониженного энергопотребления (менее 25 мкА), а выход датчика переходит в третье состояние с высоким импедансом. Это позволяет объединять группы датчиков параллельно по выходам и использовать единый АЦП без встроенного мультиплексора (рис. 7). Опрос датчиков может осуществляться внешним микропроцессором выдачей сигнала логической единицы на вход SLEEP соответствующей микросхемы.
7). Опрос датчиков может осуществляться внешним микропроцессором выдачей сигнала логической единицы на вход SLEEP соответствующей микросхемы.
Рис. 7
Применение ЛДХ
Среди областей применения линейных датчиков Холла следует выделить две наиболее распространенные. Это устройства измерения линейного или углового перемещения и измерения электрического тока.
Измерение линейного или углового перемещения
В большинстве применений для измерения перемещения объектов ЛДХ используют совместно с постоянными магнитами. Это обусловлено тем, что для поддержания максимальной линейности необходимо обеспечить большую величину изменения магнитного поля при изменении расстояния между ЛДХ и опорной точкой на перемещающемся объекте. Постоянный магнит необходимо выбирать с возможно большей напряженностью поля, например SaCo или AlNiCo.
Существует несколько вариантов взаимного расположения постоянного магнита и ЛДХ в системах измерений перемещений объектов. Наиболее простой способ — линейное расположение ЛДХ и магнита на одной оси так, чтобы силовые линии магнитного поля пересекали датчик под углом 90°.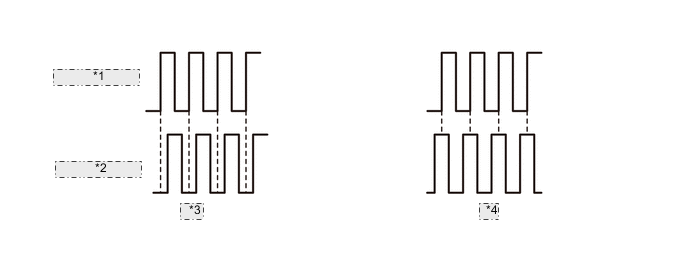 При таком расположении существует сильно нелинейная зависимость между выходным напряжением ЛДХ и расстоянием между ним и магнитом (рис. 8). При относительно небольших перемещениях отклонение от линейности невелико и можно не прибегать к дополнительной линеаризации. В противном случае необходимо использовать дополнительную схему линеаризации характеристики расстояние — напряжение.
При таком расположении существует сильно нелинейная зависимость между выходным напряжением ЛДХ и расстоянием между ним и магнитом (рис. 8). При относительно небольших перемещениях отклонение от линейности невелико и можно не прибегать к дополнительной линеаризации. В противном случае необходимо использовать дополнительную схему линеаризации характеристики расстояние — напряжение.
Рис. 8
Второй вариант — расположение ЛДХ и магнита в параллельных плоскостях. При такой ориентации система имеет точку нулевого поля, что позволяет получать дополнительную информацию о направлении перемещения по знаку выходного напряжения (например, вправо — увеличение напряжения, влево — уменьшение (рис. 9)). Как видно из рис. 9, центральная область относительно точки нулевого перемещения имеет высокую линейность, что с успехом может быть использовано в таких применениях, как потенциометры, воздушные корректоры (пневматические клапаны), датчики положения дроссельных заслонок и т. п. Кстати, в данном варианте, благодаря большой амплитуде изменения напряженности магнитного поля около нулевой точки, выходное напряжение ЛДХ тоже имеет большой размах, что упрощает последующую обработку сигнала.
Рис. 9
Третий вариант — расположение ЛДХ между двумя комплементарно установленными магнитами (рис. 10). Комплементарные поля системы двух магнитов обеспечивают хорошую линейность с высокой крутизной характеристики. Эта система также располагает точкой нулевого перемещения, что позволяет иметь информацию о направлении перемещения. Недостатком описанного варианта является достаточно небольшой диапазон перемещений в такой системе, что ограничивает область ее применения.
Рис. 10
Большинство рассмотренных вариантов в той или иной степени требуют линеаризации зависимости выходного сигнала от расстояния. Это можно реализовать с помощью АЦП и микроконтроллера, если в разрабатываемом устройстве предусмотрено последующее цифровое управление. Если же в результате требуется получить аналоговый сигнал, линейно зависящий от расстояния, процесс линеаризации может быть легко реализован с помощью программируемой аналоговой интегральной схемы (ПАИС) Anadigm [1]. При этом достаточно один раз снять экспериментальную зависимость функции преобразования и занести ее в виде таблицы коэффициентов в среду разработки.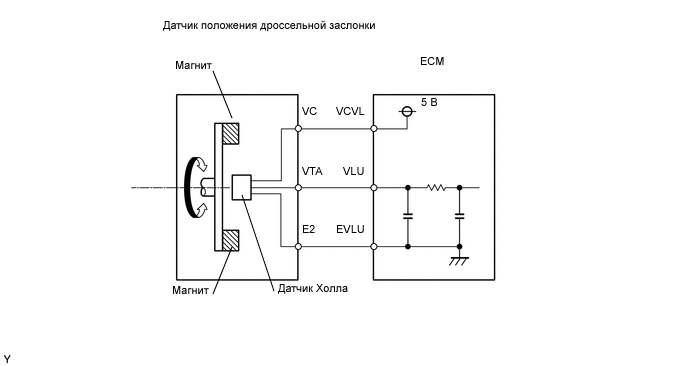 Кроме линеаризации, в ПАИС можно при необходимости реализовать и дополнительную обработку сигнала (усиление, фильтрацию, детектирование нуля и т. п.).
Кроме линеаризации, в ПАИС можно при необходимости реализовать и дополнительную обработку сигнала (усиление, фильтрацию, детектирование нуля и т. п.).
Измерение электрического тока
Существует большое количество методов измерения тока, но только три из них нашли широкое применение в производстве массовой продукции. Это резистивный метод, трансформаторные датчики и датчики тока на эффекте Холла. Резистивный метод — самый простой и экономичный, но имеет существенные недостатки, среди которых — большие потери мощности на резисторе и отсутствие гальванической развязки измерительной и измеряемой цепей. Кроме того, проволочные резисторы обладают значительной индуктивностью, что не позволяет использовать их в схемах измерения импульсных и ВЧ-токов. Применение мощных безындукционных толстопленочных резисторов сводит экономический эффект данного метода к нулю. Использование трансформаторов тока — намного более дорогое решение, к тому же возможное только при измерении переменного тока в ограниченной полосе частот.
Датчики тока на эффекте Холла занимают промежуточное положение по цене между рассмотренными выше типами. Их основные преимущества — отсутствие потерь проводимости и возможность измерения как постоянного, так и переменного тока. Помимо того элемент Холла изолирован от токовой цепи, что автоматически обеспечивает гальваническую развязку. Необходимость внешнего питания нельзя назвать существенным недостатком, так как в подавляющем большинстве случаев датчик не является оконечным устройством и после него все равно находятся другие компоненты схемы, также требующие электропитания.
Поскольку диапазон измеряемых ЛДХ значений индукции магнитного поля ограничен, при выборе конструкции необходимо правильно определить конфигурацию магнитной цепи датчика. Напряженность поля, создаваемая источником тока, должна соответствовать диапазону измерения ЛДХ.
При измерении тока от нескольких десятков до тысяч ампер датчик Холла может находиться вблизи проводника, без использования дополнительного магнитопровода.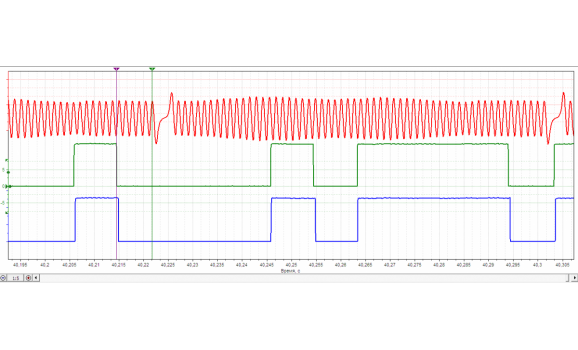 Для существующих типов датчиков оптимальной можно считать величину индукции магнитного поля около 100 Гаусс в середине диапазона измерений. Это обеспечит приемлемую чувствительность датчика по уровню выходных шумов. Индукция магнитного поля, создаваемая проводником с током, может быть оценена по известной формуле (в системе СИ):
Для существующих типов датчиков оптимальной можно считать величину индукции магнитного поля около 100 Гаусс в середине диапазона измерений. Это обеспечит приемлемую чувствительность датчика по уровню выходных шумов. Индукция магнитного поля, создаваемая проводником с током, может быть оценена по известной формуле (в системе СИ):
где r — расстояние между центрами проводника и микросхемы датчика Холла (рис. 11). При выборе положения ЛДХ относительно проводника необходимо учитывать, что наибольшая чувствительность достигается при пересечении линиями магнитного поля плоскости датчика под прямым углом. Данный метод обладает тем недостатком, что любой внешний источник магнитного поля будет влиять на показания датчика тока.
Рис. 11
Повысить чувствительность и снизить внешние влияния позволяет тороидальный магнитопровод с зазором, в котором установлена микросхема прецизионного калиброванного ЛДХ типа А1321–А1323 (рис. 12). При этом все поле сосредоточено в зазоре и внешнее влияние практически отсутствует. Индукцию в зазоре можно оценить по соотношению:
Индукцию в зазоре можно оценить по соотношению:
Рис. 12
Описанный принцип измерения тока реализован в модульных датчиках компании Allegro Microsystems семейства ACS (рис. 13, таблица 2).
Таблица 2. Характеристики модульных датчиков компании Allegro Microsystems семейства ACS
Рис. 13
Конструкция, показанная на рис. 12, не позволяет измерять малые значения токов. Это связано с ограничением чувствительности ЛДХ по выходному шуму. Так, при использовании микросхемы А1323 разрешение по магнитной индукции, ограниченное шумами в полосе 10 кГц, составляет 10 Гаусс, или около 1,5 А. Существует два выхода: либо использовать ЛДХ с линейным некомпенсированным усилителем, либо применить многовитковую конструкцию (рис. 14). В первом случае, как было показано выше, чувствительность возрастет до 0,06 Гаусс, или около 10 мА. Для обеспечения такой чувствительности в многовитковой конструкции потребуется намотать более 150 витков, что приводит к резкому увеличению индуктивности и может оказаться неприемлемым. Поэтому в каждом конкретном случае приходится идти на компромисс между разрешением датчика и полосой частот. Например, ограничение полосы частот с помощью простейшего RC ФНЧ на выходе ЛДХ А1323 до 1 кГц позволит увеличить разрешение до 0,1 А.
Поэтому в каждом конкретном случае приходится идти на компромисс между разрешением датчика и полосой частот. Например, ограничение полосы частот с помощью простейшего RC ФНЧ на выходе ЛДХ А1323 до 1 кГц позволит увеличить разрешение до 0,1 А.
Рис. 14
Заключение
Мы рассмотрели два наиболее популярных применения ЛДХ, позволяющих значительно упростить решение широкого круга задач при проектировании аппаратуры систем автоматического регулирования, электропитания и преобразовательной техники. Надеемся, что этот материал будет полезен разработчикам при выборе того или иного технического решения.
Литература
- Цикл статей, посвященный программируемым аналоговым интегральным схемам Anadigm // Компоненты и технологии. 2005. № 1–9.
Как работают датчики Холла?
Опубликовано
Датчики Холла — это магнитные датчики, которые выдают электрический сигнал, пропорциональный напряженности магнитного поля вокруг них.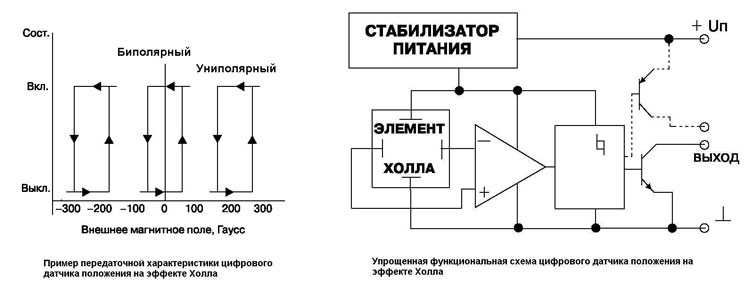 Затем электрический сигнал обрабатывается специальной схемой для получения требуемого выходного сигнала. Это бесконтактные датчики, что означает, что им не нужно вступать в контакт с каким-либо физическим элементом для генерации выходного сигнала, поскольку они зависят от магнитных полей. Это бесконтактное обнаружение дает им большое преимущество перед другими обычными типами датчиков физического контакта, такими как концевые выключатели. Прежде чем понять внутреннюю работу этих датчиков, нам нужно понять Эффект Холла , основной принцип работы этих датчиков.
Затем электрический сигнал обрабатывается специальной схемой для получения требуемого выходного сигнала. Это бесконтактные датчики, что означает, что им не нужно вступать в контакт с каким-либо физическим элементом для генерации выходного сигнала, поскольку они зависят от магнитных полей. Это бесконтактное обнаружение дает им большое преимущество перед другими обычными типами датчиков физического контакта, такими как концевые выключатели. Прежде чем понять внутреннюю работу этих датчиков, нам нужно понять Эффект Холла , основной принцип работы этих датчиков.
Эффект Холла
Если у вас есть базовые представления о магнетизме и о том, как он работает, вы знаете, что протекание тока по проводу создает вокруг него магнитное поле. Чтобы лучше понять, если вы обхватите рукой провод с током так, чтобы ваш большой палец указывал в направлении тока, направления остальных ваших пальцев покажут направление магнитного поля. Это известно как закон Эрстеда.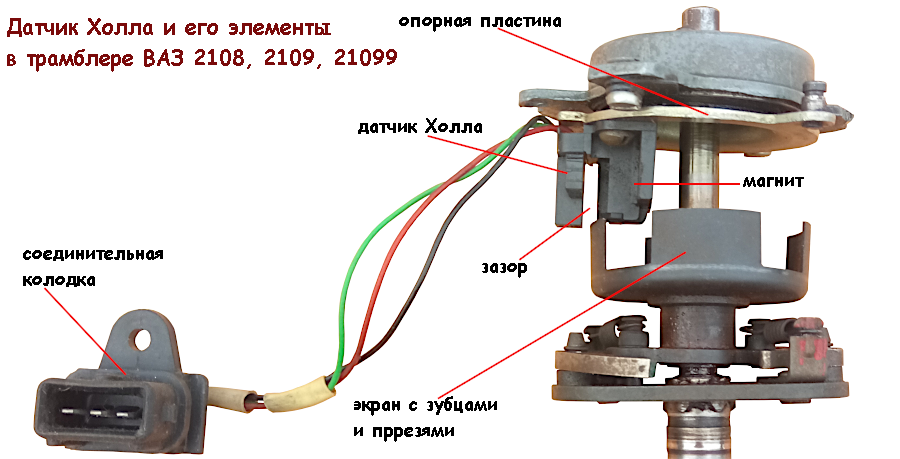
Теперь, когда мы знаем об этой важной концепции магнетизма, мы можем двигаться дальше, чтобы понять, что именно представляет собой эффект Холла. Возьмем проводящую пластину и приложим к ней напряжение. Как и в любом другом проводнике, ток начнет течь от одного конца батареи к другому через проводящую пластину. Носители заряда будут течь почти по прямой линии от одного конца пластины к другому концу, генерируя ток в противоположном направлении согласно обычному течению. И, как объяснялось выше с помощью закона Эрстеда, мы знаем, что этот поток тока будет индуцировать магнитное поле вокруг нашей проводящей пластины. Направление создаваемого здесь магнитного поля показано стрелками.
Но что, если я поднесу магнит к этой пластине? Это интересная часть! Это внешнее магнитное поле будет взаимодействовать с существующим магнитным полем вокруг пластины.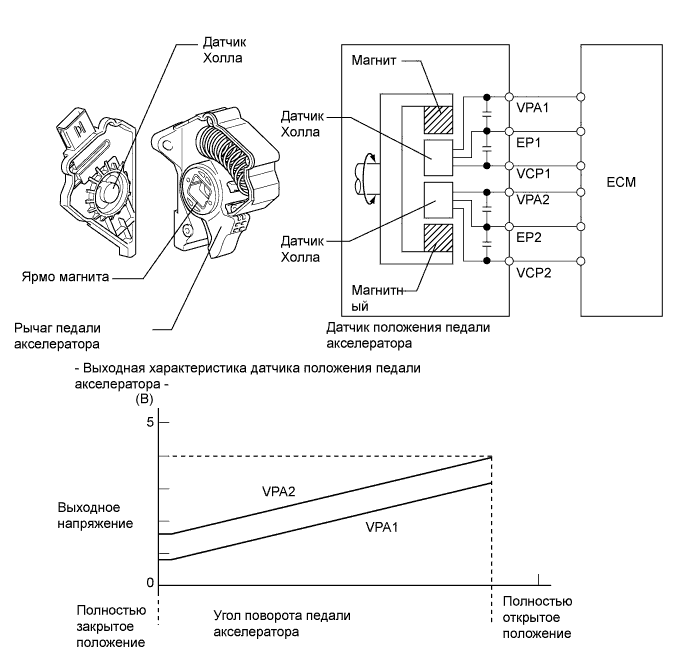 Это вызовет нарушение прямолинейного потока носителей заряда, отклоняя отрицательно заряженные электроны на одну сторону пластины и отклоняя положительно заряженные дырки на другую сторону проводящей пластины в зависимости от полярности внешнего магнитного поля. Сила, толкающая носители заряда к сторонам пластины, возникает из-за взаимодействия двух магнитных полей и известна как сила Лоренца.
Это вызовет нарушение прямолинейного потока носителей заряда, отклоняя отрицательно заряженные электроны на одну сторону пластины и отклоняя положительно заряженные дырки на другую сторону проводящей пластины в зависимости от полярности внешнего магнитного поля. Сила, толкающая носители заряда к сторонам пластины, возникает из-за взаимодействия двух магнитных полей и известна как сила Лоренца.
Если мы измерим напряжение на сторонах, где отклонились носители заряда, мы заметим, что на ней присутствует чрезвычайно малая разность потенциалов. Генерация этого измеряемого напряжения на пластине известна как эффект Холла и представлена буквой VH на изображении выше.
Работа датчиков Холла
Рисунок 4: Схема датчика Холла На рис. 4 показаны основные компоненты внутри датчика Холла. Во-первых, есть регулятор напряжения, который доводит напряжение питания до допустимого уровня для схемы. Затем это регулируемое напряжение подается на тонкую прямоугольную полупроводниковую пластину p-типа, обычно состоящую из арсенида галлия (GaAs), антимонида индия (InSb) или арсенида индия (InAs). Эта полупроводниковая пластина известна как элемент Холла . Привлечение внешнего магнитного поля к датчику создает небольшую разность потенциалов на других концах элемента Холла, известную как Напряжение Холла . Это напряжение чрезвычайно мало, и его трудно обнаружить, обычно в микровольтах (мкВ), даже при воздействии сильных магнитных полей. Чтобы решить эту проблему, датчики на эффекте Холла состоят из дифференциального усилителя с высоким коэффициентом усиления. Сгенерированное напряжение Холла затем подается на вход усилителя, который выдает усиленное напряжение, которое изменяется в зависимости от напряженности магнитного поля. Иногда в цепи присутствует триггер Шмитта, в зависимости от типа датчика Холла.
Затем это регулируемое напряжение подается на тонкую прямоугольную полупроводниковую пластину p-типа, обычно состоящую из арсенида галлия (GaAs), антимонида индия (InSb) или арсенида индия (InAs). Эта полупроводниковая пластина известна как элемент Холла . Привлечение внешнего магнитного поля к датчику создает небольшую разность потенциалов на других концах элемента Холла, известную как Напряжение Холла . Это напряжение чрезвычайно мало, и его трудно обнаружить, обычно в микровольтах (мкВ), даже при воздействии сильных магнитных полей. Чтобы решить эту проблему, датчики на эффекте Холла состоят из дифференциального усилителя с высоким коэффициентом усиления. Сгенерированное напряжение Холла затем подается на вход усилителя, который выдает усиленное напряжение, которое изменяется в зависимости от напряженности магнитного поля. Иногда в цепи присутствует триггер Шмитта, в зависимости от типа датчика Холла.
Классификация датчиков Холла
Датчики Холла классифицируются на основе их аналогового или цифрового выхода. Выходные сигналы для аналоговых или линейных датчиков Холла снимаются непосредственно с выхода операционного усилителя. Выход в этом случае прямо пропорционален магнитному полю, проходящему через датчик. На рисунке ниже показано, как происходит увеличение выходного напряжения усилителя с увеличением магнитного поля, пока оно не достигнет пределов насыщения, наложенных на него из-за источника питания.
Выходные сигналы для аналоговых или линейных датчиков Холла снимаются непосредственно с выхода операционного усилителя. Выход в этом случае прямо пропорционален магнитному полю, проходящему через датчик. На рисунке ниже показано, как происходит увеличение выходного напряжения усилителя с увеличением магнитного поля, пока оно не достигнет пределов насыщения, наложенных на него из-за источника питания.
Датчик Холла с аналоговым выходом можно преобразовать в датчик с цифровым выходом, добавив схему триггера Шмитта на выходе усилителя. Триггер Шмитта сравнивает выходной сигнал усилителя с двумя предустановленными или пороговыми значениями. Если вход выше верхнего порогового значения, он выдает высокий логический уровень. Если вход ниже нижнего порогового значения, он выдает сигнал низкого логического уровня. Когда вход находится между двумя пороговыми значениями, выход сохраняет свое текущее значение. Эта характеристика триггера Шмитта позволяет получать цифровые сигналы на выходе датчика Холла, логические 0 или 1.
Применение
Прочная конструкция датчиков Холла без движущихся частей делает их не требующими технического обслуживания, поскольку они не изнашиваются. Они также невосприимчивы к вибрации, пыли и воде. Это делает их отличным выбором для различных приложений, таких как:
- Бесщеточные двигатели постоянного тока для определения положения постоянных магнитов и соответствующего переключения токов.
- Датчики вращения и вала для расчета числа оборотов в минуту и определения направления движения.
- Измерение тока токоизмерительными клещами.
- Датчик углового положения коленчатого вала для зажигания свечей зажигания в транспортных средствах.
- Обнаружение любой поверхности без контакта с ней.
Что такое датчик Холла? — Аналоговый — Технические статьи
Датчик Холла, также известный как датчик Холла, контролирует магнитные поля с высокой точностью, согласованностью и надежностью.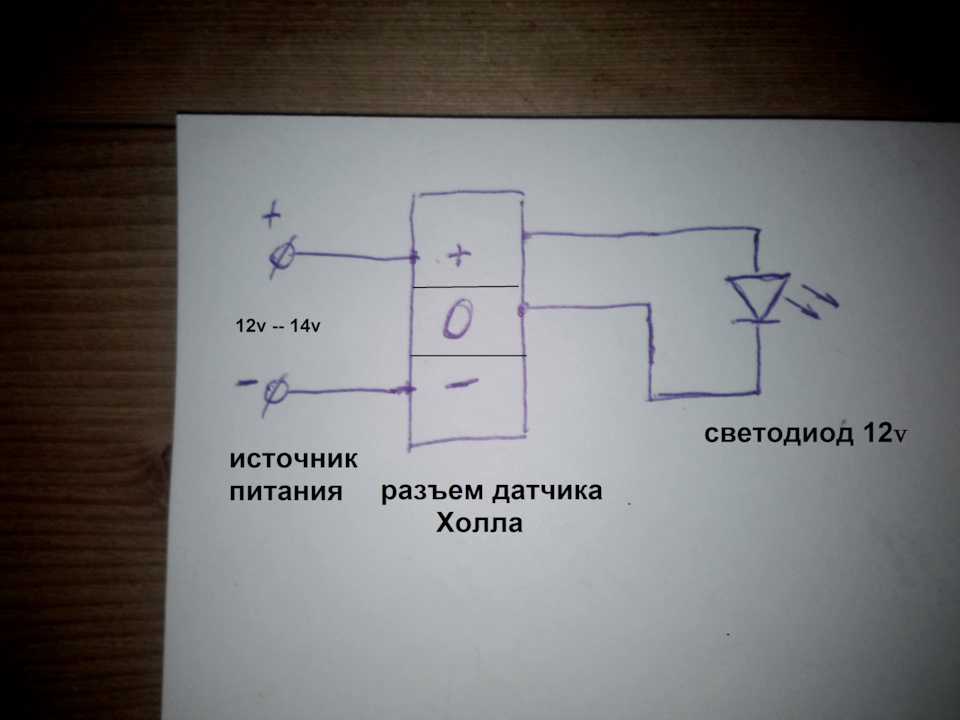 Почему это важно? Потому что это позволяет вам ощущать положение и движение объектов в системе. В этой статье я объясню, что такое датчик Холла, его основные строительные блоки и функциональные возможности, а также общие варианты использования датчиков Холла.
Почему это важно? Потому что это позволяет вам ощущать положение и движение объектов в системе. В этой статье я объясню, что такое датчик Холла, его основные строительные блоки и функциональные возможности, а также общие варианты использования датчиков Холла.
Датчик Холла — это не типичная интегральная схема (ИС), потому что, в отличие от большинства ИС, он косвенно взаимодействует со своей ключевой «схемой» — магнитом! Как показано на рисунке 1, элементарный датчик Холла содержит элемент Холла, который преобразует магнитное поле в напряжение, и схему обработки, такую как операционный усилитель. Как аналоговая, так и цифровая схемы обработки имеют решающее значение для работы датчика Холла, поскольку выходное напряжение элемента Холла очень маленькое — иногда в диапазоне микровольт. В одном из простейших датчиков Холла используются только трехвыводные корпуса, транзистор с малой схемой (SOT)-23 или схема транзистора (TO)-9.2, для источника питания, заземления и выхода.
Рис.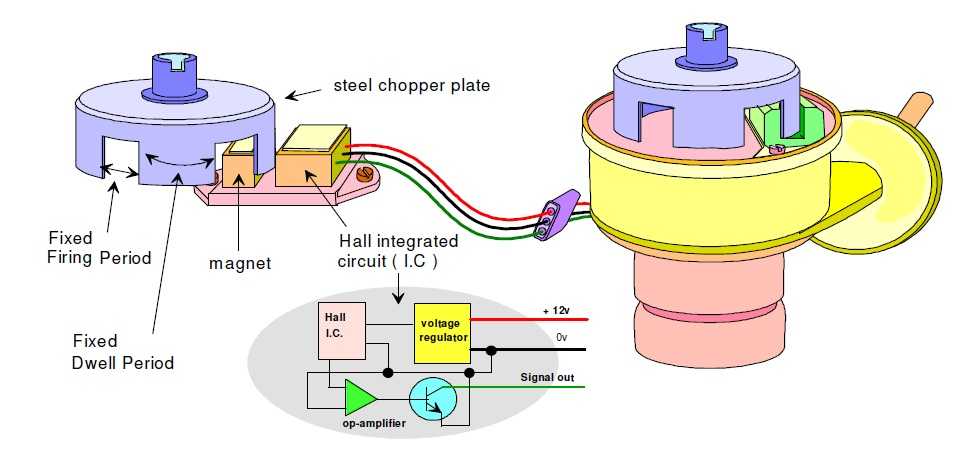 1: Базовый датчик Холла
1: Базовый датчик Холла
Магнитные поля никогда не бывают прямыми линиями, поскольку они проходят от одного полюса к другому, но на Рис. 1 для простоты показаны прямые линии, падающие на датчик. Точное знание того, как эти векторы поля ведут себя в пространстве, позволяет вам делать с ними много творческих вещей. Ознакомьтесь с примечаниями по применению на странице поддержки и обучения магнитных датчиков TI, чтобы узнать о некоторых основных идеях.
Вы когда-нибудь задумывались о том, как работают датчики Холла? Простой ответ заключается в том, что на куске проводящего материала возникает небольшое напряжение, вытесняющее электроны с одной стороны, когда ток пропускается через проводник, а магнитное поле прикладывается в ортогональном направлении (см. рис. 2). Этот потенциал напряжения связан с силой Лоренца, открытой Эдвином Холлом в 1879 году.
Это ключевой аспект датчика Холла, который необходимо учитывать при проектировании механической части.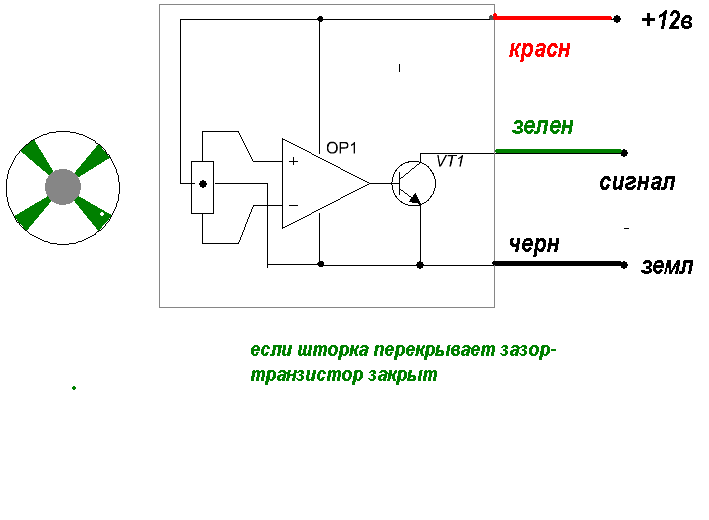 В большинстве спецификаций датчиков Холла указано ожидаемое направление магнитного поля относительно поверхности упаковки. Компания TI предлагает несколько вариантов датчиков Холла.
В большинстве спецификаций датчиков Холла указано ожидаемое направление магнитного поля относительно поверхности упаковки. Компания TI предлагает несколько вариантов датчиков Холла.
Это фундаментальное понимание того, как работают датчики на эффекте Холла, необходимо для того, чтобы вы знали, как использовать их эффективно, с правильным расположением относительно магнита. Но вам также необходимо знать, как магнитные поля, создаваемые магнитом, ведут себя на расстоянии. На рис. 3 показан простой график того, как магнитное поле затухает по мере удаления от магнита.
Рис. 3. Затухание магнитного поля на расстоянии
Чтобы максимизировать разрешающую способность измерений, необходимо убедиться, что значения минимального и максимального расстояния системы находятся в области с наибольшим изменением магнитного поля.
В настоящее время доступны три типа датчиков положения на эффекте Холла:
- Переключатель на эффекте Холла — это цифровое устройство вывода, которое переключает состояния в зависимости от воспринимаемого им магнитного поля.
 По мере приближения магнита к датчику магнитное поле, которое он воспринимает, становится сильнее и переходит в активное состояние, называемое B OP . По мере того, как магнитное поле, которое оно воспринимает, ослабевает (по мере того, как магнит оттягивается дальше), устройство переключается обратно в неактивное состояние на пороге, называемом B РП .
По мере приближения магнита к датчику магнитное поле, которое он воспринимает, становится сильнее и переходит в активное состояние, называемое B OP . По мере того, как магнитное поле, которое оно воспринимает, ослабевает (по мере того, как магнит оттягивается дальше), устройство переключается обратно в неактивное состояние на пороге, называемом B РП . - Защелка на эффекте Холла по принципу действия почти идентична переключателю, за исключением того, что она имеет точку B RP с противоположной магнитной полярностью. Другими словами, для переключения состояния выходного напряжения требуется переменная полярность магнитного поля.
- Линейный датчик Холла, также известный как линейный датчик, представляет собой аналоговое устройство, выходное напряжение которого изменяется пропорционально измеряемому магнитному полю. При отсутствии магнитного поля устройство будет производить выходное напряжение, равное половине напряжения источника питания (В Q ).
 По мере усиления магнитного поля выходное напряжение либо начнет притягивать его ближе к земле (магнитный север), либо ближе к напряжению источника питания (магнитный юг), пока не достигнет точки насыщения. Датчик не будет измерять более сильные магнитные поля, чем те, которые достигаются при насыщении, из-за неизменного выходного напряжения. Переключатели и линейные устройства выпускаются в однополярных версиях (которые могут воспринимать только северные или южные поля) или омниполярных переключателях и биполярных линейных устройствах (которые воспринимают как северные, так и южные поля).
По мере усиления магнитного поля выходное напряжение либо начнет притягивать его ближе к земле (магнитный север), либо ближе к напряжению источника питания (магнитный юг), пока не достигнет точки насыщения. Датчик не будет измерять более сильные магнитные поля, чем те, которые достигаются при насыщении, из-за неизменного выходного напряжения. Переключатели и линейные устройства выпускаются в однополярных версиях (которые могут воспринимать только северные или южные поля) или омниполярных переключателях и биполярных линейных устройствах (которые воспринимают как северные, так и южные поля).
На рис. 4 показаны соответствующие передаточные функции трех типов датчиков Холла.
Рисунок 4: Функции переключения, защелки и линейных датчиков
Магнитные точки B OP и B RP в переключателях и защелки определяют значение гистерезиса (B HYS = B OP 111111111111111111111111111111111111111111111111111111111111111110 гг.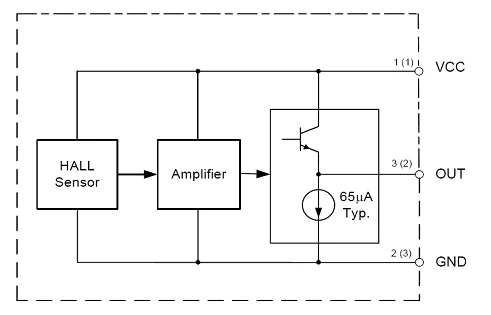 — В РП ). Использование гистерезиса в вашей системе предотвратит скачки между выходными состояниями.
— В РП ). Использование гистерезиса в вашей системе предотвратит скачки между выходными состояниями.
Общие области применения датчиков Холла
В ноутбуках, дверцах холодильников и концевых выключателях часто используются переключатели, которые обнаруживают, когда магнит приближается к датчику. Защелки популярны в приложениях с кодированием вращения и коммутацией двигателей, где вращательный аспект приложения созрел для постоянного контроля положения вращающегося вала. Линейные датчики могут точно измерять перемещение объекта, поэтому они подходят для линейных приводов, триггеров с регулируемой скоростью и педалей ускорения.
Датчики Холла обеспечивают экономичный способ контроля движущихся объектов. В зависимости от приложения вы можете использовать переключатель, защелку или линейный датчик. Если вы хотите продолжить изучение датчиков Холла, я рекомендую вам ознакомиться с нашей серией обучающих материалов TI Precision Labs по магнитным датчикам.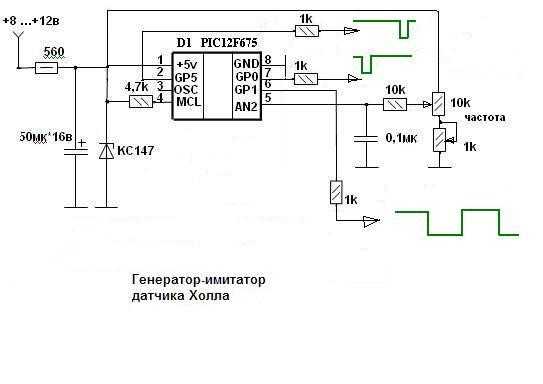
Дополнительные ресурсы
- Прочтите отчет по применению «Понимание и применение спецификаций датчиков Холла», чтобы узнать больше о том, как лучше использовать данные, содержащиеся в таблицах данных датчиков Холла.
- Прочтите отчет по применению «Проектирование однопозиционных и многопозиционных переключателей с использованием датчиков Холла TI».
- Ознакомьтесь с этими базовыми отчетами по применению линейных датчиков «Теория измерения угла линейного датчика Холла, реализация и калибровка» и «Проектирование массива линейных датчиков Холла».
Датчик Холла (HS)
Общее описание
Сигнал первичного зажигания датчика Холла обычно используется в двигателях с распределителем, но в настоящее время распределительное зажигание используется очень редко.
Если система зажигания использует HS, она обеспечивает первичный сигнал для зажигания и для впрыска топлива.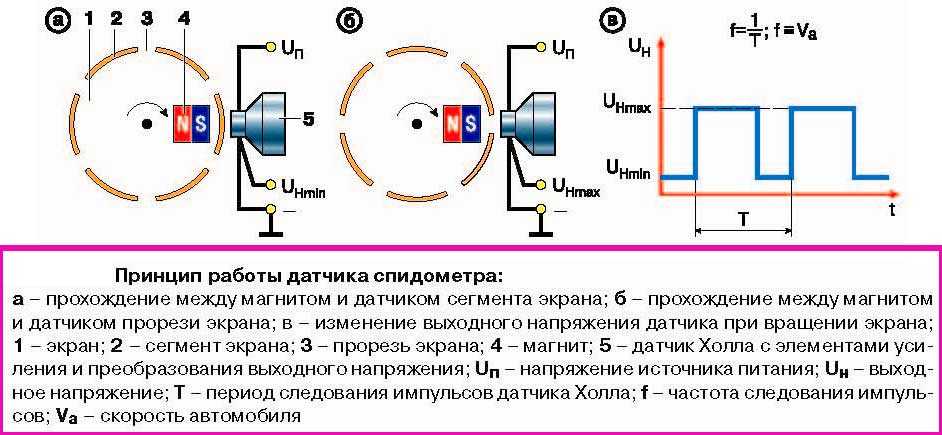
Принцип работы датчика Холла
Датчик Холла обычно устанавливается на автомобили с распределителем, в котором находится датчик Холла. ЭБУ двигателя питает датчик напряжением немного ниже номинального напряжения аккумуляторной батареи. Цепь датчика холла замыкается кабелем для обратной связи с землей. Возле переключателя Холла расположен магнит, поле которого заставляет переключатель возвращать низкое напряжение на модуль зажигания. На оптической оси распределителя крепится щиток с прорезями, количество которых соответствует количеству цилиндров. Выключатель Холла включается и выключается, пока магнит проходит между экраном и датчиком. Напряжение на усилитель подается по третьему сигнальному кабелю, а переключатель находится напротив оптической щели. Пока плотная часть экрана прилегает к выключателю, сигнал обратного напряжения прерывается из-за отклонения магнитного поля. Количество возвращаемых импульсов в четырехтактном двигателе равно количеству пазов..jpg) Важно отметить, что обратный сигнал представляет собой напряжение или его отсутствие и имеет прямоугольную форму.
Важно отметить, что обратный сигнал представляет собой напряжение или его отсутствие и имеет прямоугольную форму.
Процедура проверки состояния датчика Холла
— Быстрая проверка датчика Холла —
(без запуска двигателя) 9 В большинстве систем Холла: датчик находится на распредвале. Только в некоторых системах (VW/Audi) датчик Холла расположен на маховике.
- Отсоединить центральный высоковольтный кабель от общего вывода крышки распределителя и подсоединить его дополнительным кабелем к головке блока цилиндров.
- Отсоедините разъем датчика Холла от распределителя.
- Найдите клеммы питания, выходного сигнала и заземления.
- Замкните на короткое время контакт < 0 > и < — > жгута проводки датчика холла с помощью дополнительного кабеля.
- Если между дополнительным кабелем, соединенным с высоковольтным кабелем, и головкой блока цилиндров проскакивает искра, катушка зажигания и автоматический выключатель зажигания способны дать искру и возможная причина неисправности в самом датчике Холла.

Проверить датчик Холла осциллографом
- Снять защитный резиновый кожух разъема датчика Холла.
- Подсоедините щуп заземления осциллографа к заземлению шасси.
- Подсоедините активный конец щупа осциллографа к разъему сигнала датчика Холла.
- Запустите двигатель и оставьте его работать на холостом ходу.
- Необходимо наблюдать следующий сигнал (рис. 2). Это форма сигнала правильно работающего датчика Холла. Рабочий цикл составляет примерно 35%.
Рис. 2
Если автоматический выключатель зажигания не работает должным образом, вы должны увидеть следующую форму сигнала (рис. 3):
Рис. 3
Рис. похоже.
Рис. 4
Другие возможные повреждения:
— Отсутствие сигнала напряжения или рабочего цикла
- Остановите двигатель и снимите крышку распределителя.

- При подключенной муфте датчика Холла и включенном зажигании подключить активный конец щупа осциллографа к сигнальному выводу датчика Холла. Установите диапазон напряжения осциллографа на ± 15 В.
- Медленно проверните коленчатый вал двигателя.
Когда щель экрана проходит через воздушный зазор, напряжение должно изменяться от 10В¸12В до 0В.
— Отсутствие сигнала напряжения
- Отсоединить разъем датчика Холла от распределителя.
- Подсоедините активный конец щупа осциллографа к клемме < 2 > ( 0 ) жгута разъема.
Показание напряжения должно быть 10В¸12В. - При отсутствии напряжения от бортового компьютера на клемму < 2 > проверить омметром проводимость сигнальной цепи между датчиком Холла и бортовым компьютером.
- Если цепь исправна, проверьте наличие напряжения на соответствующей клемме разъема бортового компьютера. При отсутствии напряжения проверьте все клеммы питания и массы бортового компьютера.
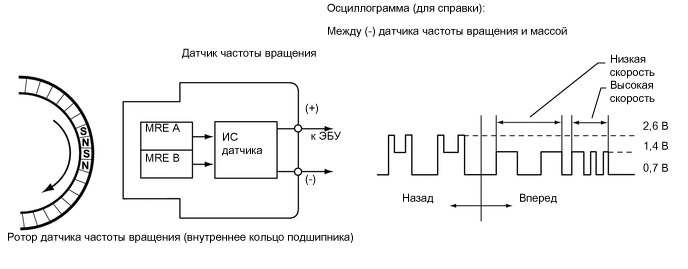
Если соединения правильные, вероятная причина в самом бортовом компьютере. - Проверить наличие напряжения (10¸12В) на клемме < 1 > (+) бортового компьютера. Если напряжение питания выходит за указанные пределы, проверьте проводимость цепи между датчиком Холла и бортовым компьютером с помощью омметра.
- Проверьте соединение с массой на выводе <3> (-) датчика Холла.
- Если напряжения питания и заземления в норме, то под подозрение попадает сам датчик Холла.
Что такое ИС на эффекте Холла?
- Что такое эффект Холла IC
- Принцип работы интегральной схемы на эффекте Холла
- Конфигурация интегральной схемы на эффекте Холла
- Типы ИС на эффекте Холла
- Методы обнаружения эффекта Холла IC
- Как выбрать подходящую микросхему на эффекте Холла
Микросхема на эффекте Холла ABLIC
Что такое эффект Холла IC
Элементы Холла являются типичным примером различных типов магнитных датчиков, в которых используются полупроводники.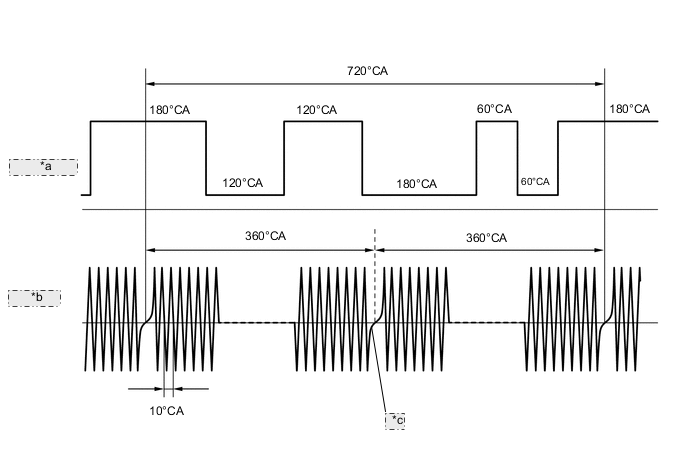 Элементы Холла — это датчики, использующие гальваномагнитный эффект, называемый эффектом Холла. От элемента Холла можно получить очень небольшое напряжение, поэтому такие элементы обычно требуют усилителей, таких как операционные усилители. Поскольку ИС на эффекте Холла сочетает в себе элемент Холла и операционный усилитель, количество внешних компонентов может быть уменьшено, а конструкция схемы может быть упрощена.
Элементы Холла — это датчики, использующие гальваномагнитный эффект, называемый эффектом Холла. От элемента Холла можно получить очень небольшое напряжение, поэтому такие элементы обычно требуют усилителей, таких как операционные усилители. Поскольку ИС на эффекте Холла сочетает в себе элемент Холла и операционный усилитель, количество внешних компонентов может быть уменьшено, а конструкция схемы может быть упрощена.
Можно различить магнитные полюса с помощью одной интегральной схемы на эффекте Холла. Такие ИС используются для самых разных целей, в том числе общего и автомобильного назначения. Основные цели обнаружения ИС на эффекте Холла включают обнаружение вращения, обнаружение положения, обнаружение открытого/закрытого положения, обнаружение тока, обнаружение направления и многие другие. ИС общего назначения на эффекте Холла используются для широкого спектра продуктов, от крупной бытовой техники, такой как стиральные машины и холодильники, до мобильных телефонов. ИС автомобильного назначения, естественно, используются для определения того, открыты или закрыты окна и двери, но многие ИС на эффекте Холла также используются для таких целей, как определение высоты транспортного средства, скорости и количества оборотов двигателя.
Принцип работы интегральной схемы на эффекте Холла
ИС на эффекте Холла содержит элемент Холла. Через этот элемент протекает ток, и, когда магнитное поле (от магнита), перпендикулярное направлению тока, приближается к элементу, на носитель, который ведет ток, действует сила Лоренца. Сила Лоренца приводит к возникновению напряжения (напряжения Холла) в направлении, перпендикулярном току и магнитному полю (эффект Холла). ИС на эффекте Холла обнаруживает наличие магнитного поля (от магнита), обнаруживая это напряжение. Выходное напряжение увеличивается прямо пропорционально плотности магнитного потока.
На основании правила левой руки Флеминга направление перпендикулярного напряжения (напряжение Холла) изменяется в зависимости от направления магнитного поля (северный или южный полюс). Следовательно, ИС на эффекте Холла может обнаруживать не только наличие магнитного поля, но и направление поля (северный или южный полюс) на основе направления этого напряжения.
Конфигурация интегральной схемы на эффекте Холла
ИС переключателя Холла усиливает напряжение (напряжение Холла), выдаваемое элементом Холла, и выдает сигнал путем обработки сигналов внутри ИС в зависимости от плотности магнитного потока.
Существует два типа интегральных схем на эффекте Холла. Один из них представляет собой высокоскоростной тип работы для обнаружения вращения двигателей и т. д., а другой тип представляет собой тип с низким потреблением тока для оборудования с батарейным питанием.
Ниже в Таблице 1 и на Рисунке 2 показана внутренняя конфигурация микросхемы Холла с низким потреблением тока.
| Блок | Описание |
|---|---|
| Элемент Холла | Обнаруживает магнитное поле (от магнита) и выводит напряжение (напряжение Холла). |
| Усилитель прерывателя | Усиливает выходное напряжение (напряжение Холла) элемента Холла. |
| Схема сна/пробуждения | Управляет работой и неработанием, осуществляя прерывистое управление. |
| Компаратор с гистерезисом (схема сравнения) | Они управляют выходом и выводят сигнал высокого или низкого уровня в зависимости от плотности магнитного потока. |
| Выходной инвертор (или Nch транзистор) |
Типы ИС на эффекте Холла
ИС на эффекте Холла, которые используют различные методы обнаружения, могут быть выбраны в соответствии с назначением. В этой главе описываются репрезентативные типы микросхем Hal.
Существует два основных типа ИС на эффекте Холла: с линейным выходом (аналоговый выход, цифровой выход), который используется для получения выходного напряжения, прямо пропорционального напряженности магнитного поля, и с переключением (цифровой выход). тип), который используется для получения сигнала включения/выключения. ИС на эффекте Холла серий S-5711A и S-5712 представляют собой ИС импульсного типа с гистерезисными характеристиками, к которым добавлены схемы Шмитта.
ИС на эффекте Холла серий S-5711A и S-5712 представляют собой ИС импульсного типа с гистерезисными характеристиками, к которым добавлены схемы Шмитта.
Типы микросхем на эффекте Холла
- Тип линейного выхода: Используется для получения выходного напряжения, прямо пропорционального напряженности магнитного поля
- Тип переключения: Используется для получения сигнала включения/выключения
Методы обнаружения эффекта Холла IC
ИС на эффекте Холла обнаруживают магнитные поля, которые имеют либо северный, либо южный полюс. В этом разделе описываются четыре типа обнаружения IC на эффекте Холла: униполярное обнаружение , то есть обнаружение либо северного, либо южного полюса, всеполярное обнаружение , то есть обнаружение как северного, так и южного полюсов без дискриминации, биполярное обнаружение , то есть обнаружение северного и южного полюсов попеременно . Биполярное детектирование используется не только для определения силы магнитного поля, но и для различения северного и южного полюсов, что является характеристикой IC эффекта Холла. Четвертый метод обнаружения — ZCL 9.0398 TM (защелка перехода через ноль) , который определяет изменение полярности точки (точка перехода через ноль). ZCL TM — это первый в мире метод обнаружения.
Биполярное детектирование используется не только для определения силы магнитного поля, но и для различения северного и южного полюсов, что является характеристикой IC эффекта Холла. Четвертый метод обнаружения — ZCL 9.0398 TM (защелка перехода через ноль) , который определяет изменение полярности точки (точка перехода через ноль). ZCL TM — это первый в мире метод обнаружения.
Выберите подходящий метод обнаружения в соответствии с типом приложения, для которого будет использоваться интегральная схема на эффекте Холла. ABLIC массово производит микросхемы на эффекте Холла, в которых используются все четыре вышеуказанных метода обнаружения.
Обнаружение униполярности
Для этого метода обнаруживается только один полюс магнитного поля (северный или южный), и операция включения/выключения выполняется в соответствии с плотностью магнитного потока для вывода сигнала высокого или низкого уровня.
Однополярное обнаружение (для продукта, который выдает сигнал низкого уровня при обнаружении южного полюса.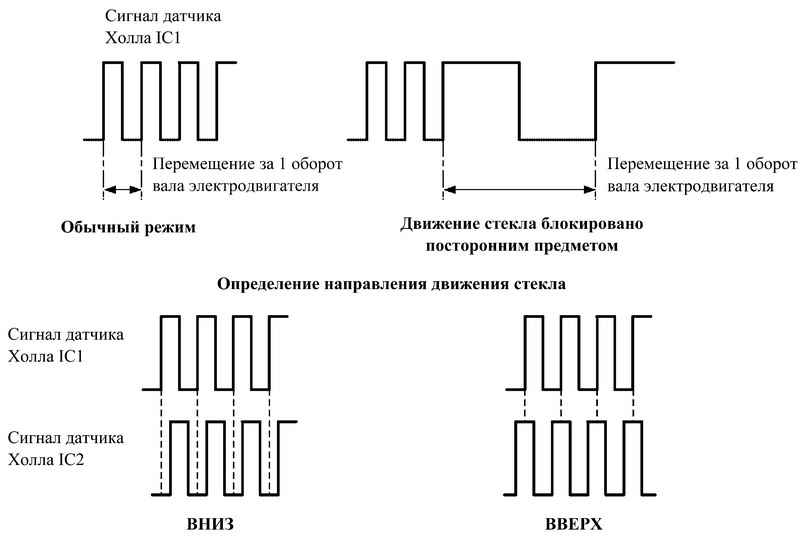 )
)Всеполярное обнаружение
Для этого метода обнаруживаются оба полюса магнитного поля (северный и южный), и операция включения/выключения выполняется в соответствии с плотностью магнитного потока для вывода сигнала высокого или низкого уровня.
Всеполярное обнаружение (для продукта, который выдает сигнал низкого уровня при обнаружении любого полюса.)Биполярное обнаружение
Для этого метода оба полюса магнитного поля (северный и южный) обнаруживаются попеременно, а операция включения/выключения выполняется в соответствии с плотностью магнитного потока и полярностью для вывода сигнала высокого или низкого уровня.
ZCL
TM (защелка перехода через нуль) Обнаружение ZCL определяет точку, когда S-полюс плотности приложенного магнитного потока меняется на N-полюс или наоборот, то есть когда происходит изменение полярности.
Обнаружение ZCL, оптимизированное для управления бесщеточными двигателями постоянного тока, может легко предотвратить снижение эффективности двигателя в результате колебаний температуры и производственных отклонений. >Дополнительная информация «Что такое микросхема на эффекте Холла ZCL?»
>Дополнительная информация «Что такое микросхема на эффекте Холла ZCL?»
«ZCL» является зарегистрированным товарным знаком ABLIC Inc.
Давайте сократим трудозатраты на проектирование, чтобы создать идеальный двигатель
с помощью первого в мире метода обнаружения
На что способна интегральная схема на эффекте Холла ZCL
Как выбрать подходящую интегральную схему на эффекте Холла
ABLIC предлагает широкий выбор интегральных схем на эффекте Холла по требованию клиентов. Вы можете выбрать подходящую микросхему на эффекте Холла, рассмотрев приведенный ниже порядок.
| Приложения | Использование в автомобиле | Общего назначения (высокоскоростной/высоковольтный) | Универсальный (маленький, низкий I ДД ) |
|---|---|
| Метод обнаружения / обнаружение полюса | Обнаружение униполярности (S-полюс) | Униполярное обнаружение (N-полюс) | Всеполярное обнаружение | Обнаружение биполярного расстройства | Обнаружение ZCL |
| Операционная среда | Рабочая температура | Рабочее напряжение |
| Упаковка | СНТ-4А | СОТ-23-3 | СОТ-23-3С | ТО-92С |
| Тип выхода | Форма вывода | Выходная логика |
| Частота прерывания (потребляемый ток) / Магнитная чувствительность | *Выбирается в Таблице выбора |
Таблица выбора ИС на эффекте Холла
IC на эффекте Холла ABLIC
Измерение датчика Холла распределительного вала
Измерение датчика Холла распределительного валаЗагрузка измерений
| Тип: | Датчик распредвала Холла | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Источник питания: | От системного реле или ЭБУ, 5 В или 12 В и масса | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Тип сигнала: | Частотный | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Уровень сигнала: | Переключение между 0 В и 5 В
Датчик Холла можно использовать для измерения напряженности магнитного поля.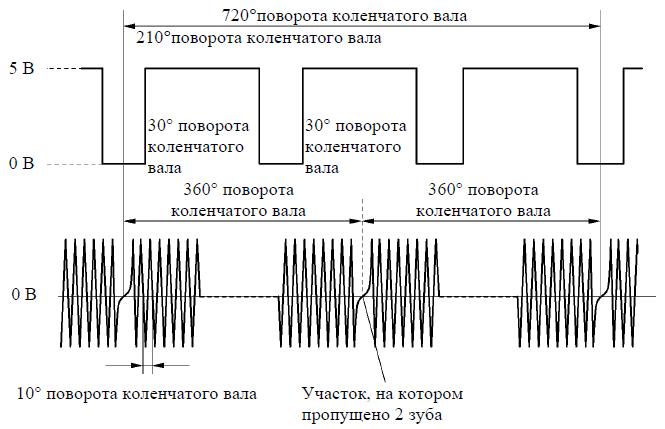 При использовании в автомобильных приложениях датчик размещается рядом или напротив
постоянный магнит.
Когда металлический предмет проходит мимо датчика, магнитное поле нарушается.
Электроника датчика преобразует нарушение магнитного поля в цифровой сигнал, вытягивая
напряжение от ECU к массе в зависимости от напряженности магнитного поля. При использовании в автомобильных приложениях датчик размещается рядом или напротив
постоянный магнит.
Когда металлический предмет проходит мимо датчика, магнитное поле нарушается.
Электроника датчика преобразует нарушение магнитного поля в цифровой сигнал, вытягивая
напряжение от ECU к массе в зависимости от напряженности магнитного поля.Объект, нарушающий магнитное поле, часто представляет собой металлический диск или кольцо с определенным рисунком отверстий. расположен на конце распределительного вала. Когда распредвал вращается, в сигнале датчика распредвала виден рисунок отверстий. Частота сигнала зависит от количества отверстий в диске и скорости распределительный вал вращается. Положение двигателя можно определить по комбинации сигналов распределительного и коленчатого валов. Подключение лабораторного эндоскопа Правильность работы датчика положения распределительного вала можно проверить, измерив следующие напряжения сигналов:
см.
Лабораторный прицел подключается к датчику распределительного вала через измерительный провод TP-C1812B и обратный датчик TP-BP85.
Лабораторная область установлена в нормальный режим области действия с бесконечным временем ожидания триггера.
Когда однократное измерение запускается с этими настройками,
измерение выполняется при запуске двигателя. ИзмерениеНа рис. 3 показана осциллограмма датчика распредвала двигателя при прокручивании коленчатого вала. Этот сигнал можно загрузить и использовать для правильной настройки лабораторного объема или в качестве эталонного сигнала. Загрузить измерение датчика распредвала Рис. 3. Лабораторное измерение датчика распредвала Канал 1 (красный) показывает сигнал датчика распредвала, а канал 2 (желтый) мощность. питание датчика распредвала. Короткий всплеск сигнала в начале измерения вызван переключением включения стартера. Этот всплеск не влияет на работу системы управления двигателем, поскольку он только реагирует на нарастающие и спадающие фронты сигнала. Измеряемый датчик распределительного вала генерирует два импульса за один оборот, один из которых шире другого. Схема и количество импульсов на оборот могут различаться от системы к системе.
Системы с (намного) большим количеством импульсов на оборот имеют более высокую частоту сигнала. Питание датчика коленчатого вала в этом примере измерений подается от системного реле. В других автомобилях возможно питание от ЭБУ с другим напряжением, например 5 В. ДиагностикаЗначения сигналов могут отличаться на разных типах блоков управления двигателем и датчиков распредвала. Обратитесь в ATIS за информацией о конкретных блоках управления двигателем и датчиках распредвала. Следующие отклонения сигнала могут указывать на проблему:
RELATEDPRODUCTSAutomotive Test Scope ATS5004DMeasure lead TP-C1812BBack Probe TP-BP85Automotive Diagnostics Kit ADK5004DATISСТАТЬИ, СВЯЗАННЫЕ С
Отказ от ответственности Этот документ может быть изменен без уведомления. Все права защищены. Информация в этом примечании к применению тщательно проверена и считается надежной. однако TiePie Engineering не несет ответственности за любые неточности. Предупреждение о безопасности:
Этот веб-сайт использует функциональные файлы cookie для функциональных целей. Эти файлы cookie всегда размещаются и считываются. Этот веб-сайт также может использовать нефункциональные файлы cookie для аналитических целей. Измерение датчика ABS на эффекте ХоллаDownload measurement
Работа датчика ABS на эффекте Холла Датчик антиблокировочной тормозной системы (ABS) используется для определения скорости вращения колеса, чтобы предотвратить его блокировку.
при торможении.
Датчик ABS на эффекте Холла состоит из постоянного магнита с датчиком на эффекте Холла рядом с ним. В большинстве случаев объектом воздействия на магнитное поле является диск или кольцо с равномерно распределенными зубьями. устанавливается на карданный вал или в подшипник. Когда колесо вращается, зубья проходят мимо датчика, и рисунок, в котором они расположены, виден в сигнале датчика АБС. Каждый период сигнала представляет собой зубец, проходящий через датчик. Частота сигнала зависит от скорости вращения колеса и количества зубьев на диске или звенеть. В автомобилях используются два разных типа датчика ABS на эффекте Холла: с 2 или 3 проводами. 3-проводной датчик ABS на эффекте Холла имеет простой источник питания и сигнальный провод с сигналом.
напряжение (U s ), поступающее на ЭБУ АБС, показано на рисунке 1.
В зависимости от конструкции датчика наличие зубца вызывает высокое или низкое напряжение сигнала и
щель между зубами противоположная. Рисунок 1: Схематическое изображение 3-проводного датчика ABS на эффекте Холла Двухпроводной датчик ABS на эффекте Холла имеет провод питания 12 В, но не имеет прямого заземления.
Как показано на рисунке 2, заземление датчика также является сигнальным проводом.
Двухпроводной датчик ABS на эффекте Холла регулирует ток.
Величина тока (I s ) изменяется датчиком, когда зуб проходит мимо датчика.
В зависимости от конструкции датчика наличие зубца вызывает высокий или низкий ток и
щель между зубами противоположная.
Этот ток, протекающий через резистор внутри ЭБУ АБС, создаст напряжение (U с )
относительно земли, аналогично прямоугольному сигналу 3-проводного датчика ABS на эффекте Холла.
Уровни напряжения отличаются и намного ниже, чем у 3-проводного датчика ABS на эффекте Холла из-за
низкие токи.
Уровни напряжения также могут меняться от системы к системе в зависимости от протекающего тока и номиналов резисторов. Рисунок 2: Схематическое изображение двухпроводного датчика ABS на эффекте Холла Подключение лабораторного эндоскопаВ этой статье проводится измерение двухпроводного датчика ABS на эффекте Холла. Показаны инструкции по измерению 3-проводного датчика ABS на эффекте Холла. Таким образом, 3-проводной датчик ABS на эффекте Холла также может быть измерен. Схемы сигналов и диагностическую информацию для 3-проводного датчика ABS на эффекте Холла можно прочитать на Страница датчика коленчатого вала на эффекте Холла, потому что они похожи. Подключение к двухпроводному датчику ABS на эффекте ХоллаПравильность работы 2-проводного датчика ABS на эффекте Холла можно проверить, измерив следующие напряжения сигналов: см. рисунок 3:
3: Схема измерения Рис. 4: Измерение работающего двухпроводного датчика ABS на эффекте ХоллаЛабораторный прицел подключается к двухпроводному датчику ABS на эффекте Холла через измерительный провод TP-C1812B и обратный датчик TP-BP85. Лабораторная область установлена в нормальный режим области действия с бесконечным временем ожидания триггера. Когда однократное измерение запускается с этими настройками, измерение производится при вращении колеса (от руки). Подключение к 3-проводному датчику ABS на эффекте ХоллаПравильное функционирование 3-проводного датчика ABS на эффекте Холла можно проверить, измерив следующие напряжения сигналов: см. рисунок 5:
Рисунок 5: Схема измерения Лабораторный прицел подключается к 3-проводному датчику ABS на эффекте Холла через измерительный провод TP-C1812B и обратный датчик TP-BP85. ИзмерениеНа рис. 6 показана осциллограмма двухпроводного датчика ABS на эффекте Холла при повороте колеса вручную с помощью ключ зажигания повернулся. Этот сигнал можно загрузить и использовать для правильной настройки лабораторного объема или в качестве эталонного сигнала. Download Измерение датчика ABS на эффекте Холла Рисунок 6: Лабораторные измерения двухпроводного датчика ABS на эффекте Холла Канал 1 (красный) показывает напряжение сигнала датчика ABS на эффекте Холла, а канал 2 (желтый)
источник питания.
Сигнал начинается с низкой частоты, потому что колесо вращается медленно.
В середине измерения частота высока из-за более высокой скорости вращения.
В конце измерения колесо снова останавливается, что видно по падающему
частота сигнала. Когда во время движения автомобиля измеряются сигналы датчика ABS на эффекте Холла, частота увеличится, а амплитуда останется прежней. Когда отдельные импульсы в сигнале становятся слишком узкими, чтобы быть должным образом видимыми во время вождения, частота дискретизации должна быть установлена выше с помощью увеличения/уменьшения частота дискретизации. ДиагностикаЗначения сигналов могут различаться на разных типах блоков управления двигателем и датчиках ABS на эффекте Холла. Обратитесь в ATIS за информацией о конкретных блоках управления двигателем и датчиках ABS на эффекте Холла. Следующие отклонения сигнала могут указывать на проблему:
RELATEDPRODUCTSAutomotive Test Scope ATS5004DMeasure lead TP-C1812BBack Probe TP-BP85Automotive Diagnostics Kit ADK5004DATISСТАТЬИ, СВЯЗАННЫЕ С
Отказ от ответственности Этот документ может быть изменен без уведомления. Все права защищены. Информация в этом примечании к применению тщательно проверена и считается надежной. однако TiePie Engineering не несет ответственности за любые неточности. Предупреждение о безопасности:
|
 рисунок 1:
рисунок 1: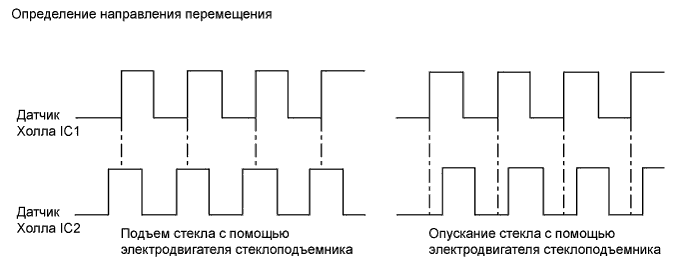
 Используемая частота дискретизации может быть слишком низкой, чтобы сигнал был виден.
В этом случае его можно увеличить с помощью панели инструментов.
Используемая частота дискретизации может быть слишком низкой, чтобы сигнал был виден.
В этом случае его можно увеличить с помощью панели инструментов.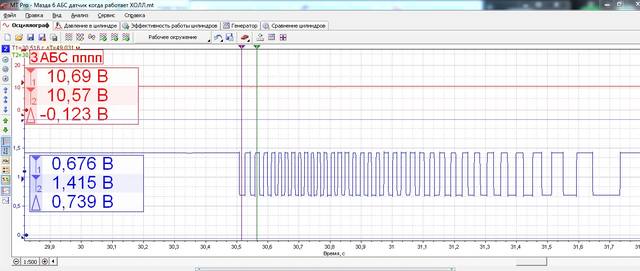 Сигнал с датчика отображается и может быть загружен.
Чтобы помочь определить, правильно ли работает датчик коленчатого вала на эффекте Холла,
различные возможные отклонения от примерного сигнала упоминаются вместе с вероятными причинами.
Сигнал с датчика отображается и может быть загружен.
Чтобы помочь определить, правильно ли работает датчик коленчатого вала на эффекте Холла,
различные возможные отклонения от примерного сигнала упоминаются вместе с вероятными причинами.
 Опасными считаются напряжения свыше 30 В переменного тока (среднеквадратичное значение), 42 В переменного тока пикового значения или 60 В постоянного тока.
Опасными считаются напряжения свыше 30 В переменного тока (среднеквадратичное значение), 42 В переменного тока пикового значения или 60 В постоянного тока. При размещении нефункциональных файлов cookie обрабатываются отслеживаемые данные.
Когда вы нажимаете кнопку «Принять», вы разрешаете размещение нефункциональных файлов cookie.
При размещении нефункциональных файлов cookie обрабатываются отслеживаемые данные.
Когда вы нажимаете кнопку «Принять», вы разрешаете размещение нефункциональных файлов cookie.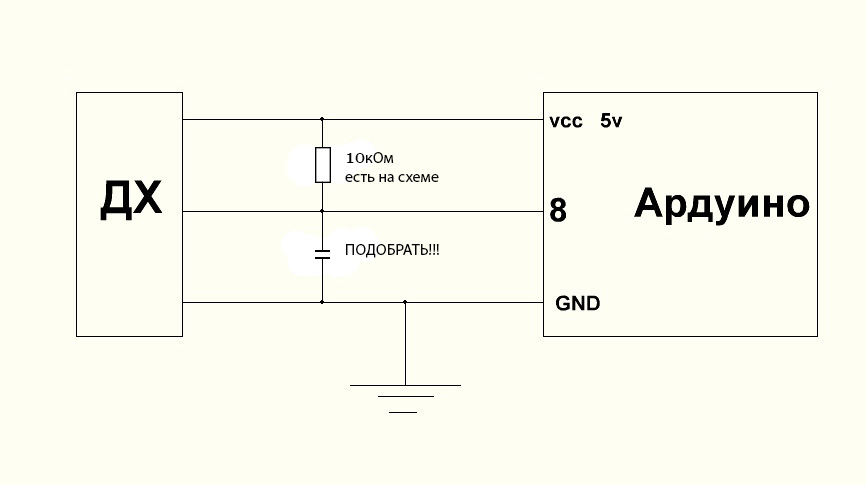 Напряженность магнитного поля изменяется, когда объект, чувствительный к магнетизму, проходит через магнитное поле
магнит.
Это изменение магнитного поля вызывает изменение выходного сигнала датчика Холла.
Напряженность магнитного поля изменяется, когда объект, чувствительный к магнетизму, проходит через магнитное поле
магнит.
Это изменение магнитного поля вызывает изменение выходного сигнала датчика Холла.