Самый мощный электромотор для лодки
Какой лодочный электромотор считать самым мощным? Тот, который потребляет большую мощность от аккумуляторной батареи? Или может быть тот, который легко толкает вперед даже тяжелую лодку, потребляет маленький ток и долго работает от аккумуляторов?
Содержание статьи
Бензиновый и электрический моторы для лодки
Лодочные электромоторы могут развивать ту же тягу, что и двигатели внутреннего сгорания обладая при этом значительно меньшей мощностью на валу. Это происходит благодаря различной форме кривых крутящего момента электрического и бензинового двигателей. У двигателя внутреннего сгорания график крутящего момента имеет выраженный пик, из-за которого максимальный момент доступен только в ограниченном диапазоне оборотов вала. Зависимость крутящего момента от оборотов у электродвигателя гораздо более плоская и его достаточно при любой частоте вращения
Максимальный крутящий момент и мощность – это важные характеристики двигателя.
Пологая характеристика момента позволяет устанавливать на лодочные электромоторы более эффективные гребные винты. КПД гребного винта у некоторых электромоторов для небольших лодок в три раза выше, чем у подвесных бензиновых двигателей того же класса.
Какая бывает мощность
Производители лодочных моторов используют разные виды мощности. Встречаются мощность на валу, потребляемая мощность и даже тяга. Поэтому прежде чем сравнивать лодочные электромоторы различных марок нужно привести имеющиеся данные к «общему знаменателю»
Единый критерий для сравнения важен. Мощности, измеренные в разных местах, существенно отличаются друг от друга. Мотор, развивающий на валу 4 л. с., на винте выдает всего 1 л.с.
Мощности, измеренные в разных местах, существенно отличаются друг от друга. Мотор, развивающий на валу 4 л. с., на винте выдает всего 1 л.с.
Потребляемая мощность, на валу и на винте
Гребной винт преобразует энергию двигателя в силу, которая преодолевая сопротивления воды и воздуха двигает лодку вперед с выбранной скоростью. Часть энергии при этом теряется и мощность, идущая на движение судна, всегда меньше той, что потребляет двигатель. Rt — сопротивление воды; Pe — эффективная (буксировочная) мощность; Pt — мощность на винте; Pв — мощность на валу; Pb — мощность двигателя. T — тяга; V — скоростьПотребляемая мощность – часто используется как характеристика электродвигателя для лодки (мощность = ток х напряжение). Измеряется в Ваттах или лошадиных силах. Производители бензиновых или дизельных лодочных моторов этот вид мощности не используют. Однако для двигателя внутреннего сгорания потребляемую мощность также можно посчитать, если умножить теплотворную способность топлива на его расход.
Мощность на валу – используют производители подвесных бензиновых лодочных моторов. Этот вид мощности считается также как у автомобиля (мощность = крутящий момент х угловая скорость). Единица измерения – лошадиные силы или ватты. Мощность на валу учитывает потери в редукторе, но не учитывает потери на винте, которые составляют от 20 до 70%.
Мощность на винте – более ста лет служит общепринятой характеристикой двигателя в судостроении. Учитывает все потери мощности и определяет энергию, передаваемую лодке двигателем.
Тяга лодочного электромотора
Во время вращения винта на поверхностях лопастей возникает подъемная сила. Составляющая этой силы направленная по оси движения лодки называется упором или тягой. Она характеризует ту часть подъемной силы, которая толкает судно вперед.
Полезная мощность, производимая лодочным винтом, равна его тяге, умноженной на текущую скорость лодки. В характеристиках электромоторов производители всегда указывают максимальное значение тяги. Сделать по ней вывод о мощности электромотора на винте без установки датчиков и проведения измерений нельзя.
Сделать по ней вывод о мощности электромотора на винте без установки датчиков и проведения измерений нельзя.
Тягу определяют в ходе испытаний, во время которых лодку соединяют с пирсом динамометром и заставляют двигаться вперед. Проверку проводят на спокойной воде, в безветренную погоду, на достаточной глубине и расстоянии от берега. Для носовых лодочных электромоторов значение тяги чаще всего указывают в фунтах силы (lbs).
Потери мощности в лодочном электромоторе
Ротор, щеточный узел и щетки лодочного электромотора. Щетки и кольца служат источником потерь и снижают надежность электромотора. В мощных лодочных электромоторах двигатели постоянного тока не используютПотери мощности пропорциональны сопротивлению проводника и квадрату протекающего через него тока. Если ток возрастает вдвое, потери возрастают в четыре раза. Если ток растет в десять раз, потери увеличиваются в сто. Уменьшить ток и потери можно, если повысить напряжение в цепи.
Общепринятое на сегодня напряжение мощных лодочных электромоторов 48 вольт, но для небольших лодок подходят и 24-вольтовые модели. При силе тока 50 А максимальная мощность электромотора в 12-вольтовой системе составит 600 Ватт, а в 24 Вольтовой – 1200 Ватт
Второй способ снизить потери в цепи постоянного тока – это увеличить сечение кабеля. Правильно подобранный кабель повышает эффективность и безопасность электрической системы, устраняет локальный перегрев и снижает потери энергии.
Винт
Высокий КПД имеет винт с большим диаметром, шагом и низкой скоростью вращения. Однако с таким винтом может работать только мотор, развивающий высокий крутящий момент.
Редуктор служит источником дополнительного шума и потерь. В профессиональных электромоторах их стараются не использовать
В профессиональных электромоторах их стараются не использоватьБольшинство гребных винтов для подвесных моторов небольших лодок созданы на основе испытаний проведенных еще в 1940–1960-х годах прошлого века. Общие принципы проектирования, появившиеся тогда, систематизированы в виде таблиц и графиков и используются изготовителями до сих пор.
При разработке современных винтов используют другой подход. Сначала на компьютере создают трехмерную модель, а затем шаг и кривизну профиля винта оптимизируют для каждого сечения с учетом изменяющихся вдоль диаметра условий обтекания потоком воды. Винты этого типа называют винтами с переменным шагом. Их потери меньше, а КПД выше.
Виды электромоторов
Подвесные
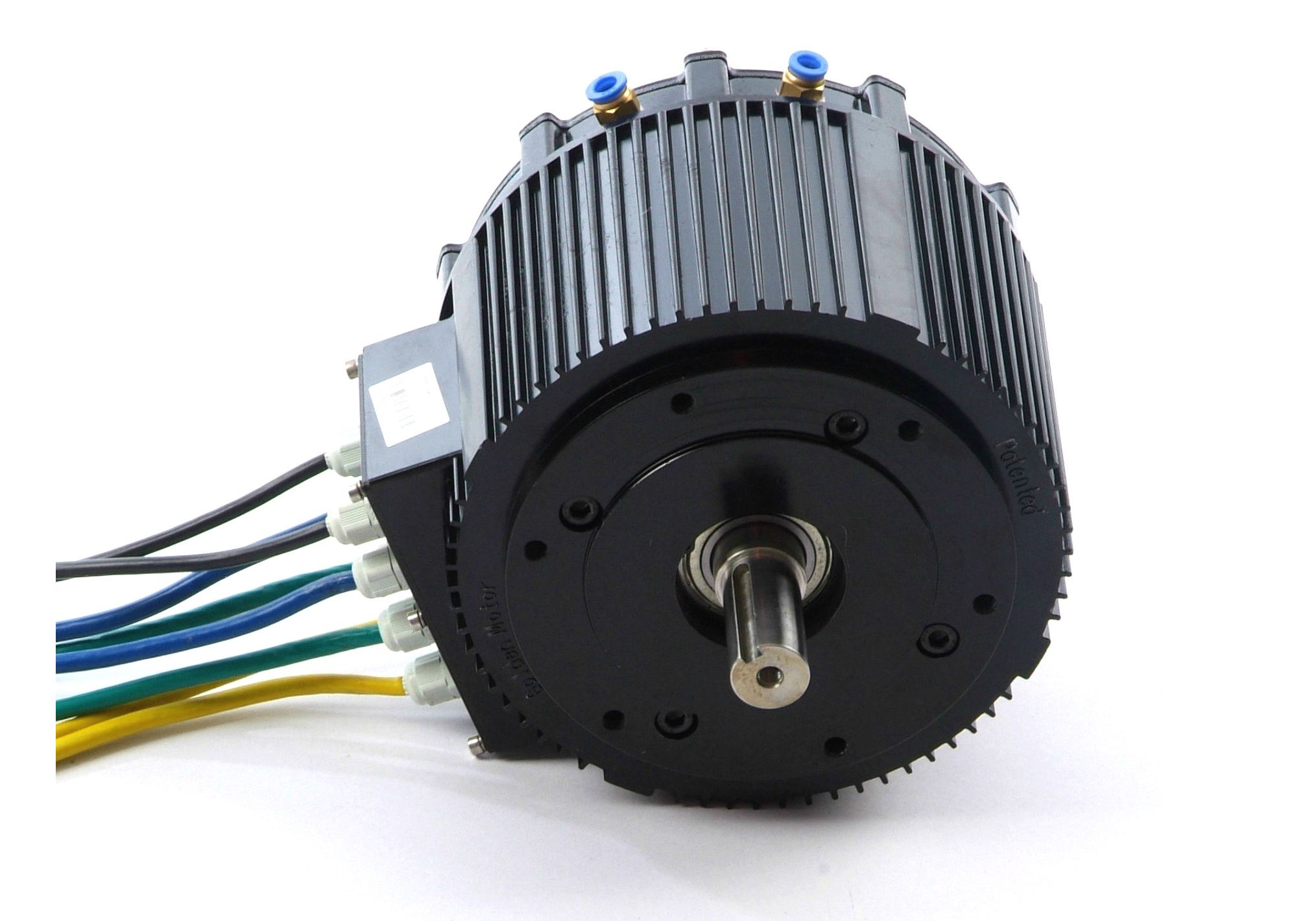
Подвесной лодочный электромотор для профессионального использования AquamotПодвесные электромоторы устанавливают на транце или реже на носу лодки. В стандартном исполнении электромотор соединяется с системой рулевого управления, в моделях с румпелем лодкой управляют поворачивая двигатель. Мощность румпельных электромоторов варьируется от 1 до 4 кВт, а у моделей с рулевым управлением достигает 15 кВт.
Как правило мощные подвесные электромоторы рассчитаны на напряжение 24-48 Вольт. 24 вольтовый электрический двигатель мощностью 2,2 кВт развивает на винте тягу 124 lbs и сопоставим по этому показателю с подвесным бензиновым мотором мощностью 6,5 л.с. Двигатель мощностью 15 кВт эквивалентен бензиновому мотору 35 л.с
В подвесных лодочных электромоторах используют асинхронные двигатели переменного тока или синхронные двигатели на постоянных магнитах. Оба типа двигателей бесщеточные, не имеют изнашивающихся частей и не требуют обслуживания.
Pod электромоторы
POD электромоторы подходят как для однокорпусных лодок и катеров, так и для катамаранов
Фиксированные POD электромоторы бывают мощностью от 1 до 25 кВт. Они подходят как для небольших лодок, сдающихся в прокат, так и для судов весом несколько тоннЭлектромотор состоит из блока управления и гондолы внутри которой установлен асинхронный или BLDC электродвигатель.
Производится две модификации POD электромоторов — фиксированная и поворотная. Поворотная модель соединяется с системой рулевого управления или румпелем и обеспечивает более высокую маневренность судна
Электрические лодочные моторы типа Pod выпускаются мощностью от 1 до 25 кВт.
Бортовые лодочные электромоторы
Бортовой лодочный электромотор Aquamot. Электромоторы этого типа выпускаются мощностью от 2,5 до 30 кВТ В бортовой силовой установке электродвигатель устанавливают внутри судна и соединяют с винтом валопроводом. Бортовым моторам требуется принудительное охлаждение. В зависимости мощности электродвигателя оно может быть воздушным или водяным.
В зависимости мощности электродвигателя оно может быть воздушным или водяным.Установка бортового электромотора на лодку сложнее чем подвесного или POD. Дополнительно потребуется вал, муфта, сальник, втулка Гудрича (дейдвудный подшипник), дейдвудная труба. Валы электромотора и винта необходимо центрировать – они должны иметь общую ось. При неправильной установке возможны протечки через сальник
Электромоторы для профессионального использования
Если лодка или катер используется для перевозки туристов, организации экскурсий или водных прогулок, то электрическая установка может оказаться выгоднее двигателя внутреннего сгорания. Экономия достигается из-за более низкой стоимости энергии и практически нулевых затрат на техническое обслуживание.
Сравнение показывает, что при коммерческой эксплуатации судна переход с бензинового на электрический двигатель окупается за 1-2 года. Однако для этого профессиональный лодочный электромотор должен отвечать определенным требованиям:
Однако для этого профессиональный лодочный электромотор должен отвечать определенным требованиям:
- Иметь высокий КПД – это позволит эксплуатировать его с аккумуляторной батареей меньшей емкости, снизит первоначальные затраты, время зарядки и стоимость потребляемой электроэнергии
- Быть простым и надежным — электромотор должен выдерживать ежедневную интенсивную нагрузку и иметь минимум лишних функций. Дополнительные возможности, такие как встроенный компьютер c GPS, повышают цену и могут стать источником неисправностей в будущем.
- Стоимость ремонта и технического обслуживания в течении периода эксплуатации должна быть минимальной Катамаран с установленным лодочным электромотором отправляется к месту эксплуатации
Надежность
Корпуса профессиональных лодочных электромоторов отливают из алюминия, а затем дополнительно наносят многослойное антикоррозионное покрытие. Вал делают из нержавеющей стали, а винт из бронзы. Для защиты от коррозии устанавливают жертвенный анод
В мощных электромоторах для лодок используют асинхронные двигатели переменного тока или BLDC PM электродвигатели, которые также называют вентильными. Питание вентильных двигателей осуществляется от импульсных источников энергии. При этом импульсы напряжения подаются на обмотки статора в заданные моменты времени – при определенном положении ротора относительно статора. Положение ротора определяют датчики, которые, как и импульсный источник питания, в моторах небольшой мощности находятся на печатной плате, расположенной внутри подводной части электромотора.
Питание вентильных двигателей осуществляется от импульсных источников энергии. При этом импульсы напряжения подаются на обмотки статора в заданные моменты времени – при определенном положении ротора относительно статора. Положение ротора определяют датчики, которые, как и импульсный источник питания, в моторах небольшой мощности находятся на печатной плате, расположенной внутри подводной части электромотора.
Внутри корпуса трехфазного асинхронного двигателя дополнительных электронных компонентов нет. На долговечность двигателя влияют только подшипники и обмотки, однако качество этих элементов в настоящее время таково, что асинхронные двигатели служат до 50 000 часов без осмотра и ремонта. Асинхронные двигатели просты, надежны и эффективны. КПД мощного электродвигателя 85-92%, что на 30% выше, чем у двигателя постоянного тока, и на 40-50% больше, чем у двигателя внутреннего сгорания.
Асинхронные двигатели просты, надежны и эффективны. КПД мощного электродвигателя 85-92%, что на 30% выше, чем у двигателя постоянного тока, и на 40-50% больше, чем у двигателя внутреннего сгорания.
Система безопасности электромотора для коммерческих лодок имеет как механические, например, заданный предел прочности киля, так и электронные средства защиты. Электромотор отключается при перегрузке по току, при пониженном и повышенном напряжении аккумуляторов
Экономичность
Два подвесных электромотора мощностью по 11 кВт каждый на небольшом пароме для перевозки пассажировВысокий КПД достигается только при последовательном и тщательном улучшении всех элементов электромотора. Потерь мощности стараются избежать во всех узлах. Воздушный зазор в двигателе, конструкция ротора, изоляция обмоток оптимизируют на компьютере так, чтобы электродвигатель подходил для использования на лодках.
Корпуса двигателей и винты проектируют по тем же правилам, что и в коммерческом судостроении. Сначала рассчитывают обтекание подводных частей по трехмерной модели, а затем результаты проверяют на натурных гидродинамических испытаниях.
Сначала рассчитывают обтекание подводных частей по трехмерной модели, а затем результаты проверяют на натурных гидродинамических испытаниях.
Редуктор, который устанавливают на некоторых моделях лодочных электромоторов не используют. Вместо этого вал электродвигателя напрямую соединяют с винтом, и конструируют двигатель таким образом, чтобы его обороты совпадали с оптимальными для винта
В результате во время движения электромотор не теряет мощность, не создает дополнительное сопротивление и способен долго работать на одной зарядке аккумулятора
Yamaha представила очень компактный и очень мощный автомобильный электродвигатель (3 фото + видео) » 24Gadget.Ru :: Гаджеты и технологии
Один из мировых лидеров в производстве мотоциклов, скутеров и велосипедов, японская корпорация Yamaha Motor Company, в последнее время активно продвигается на рынке электрического транспорта. Именно инженеры Yamaha первыми предложили в 1993 году устанавливать электрический двигатель на велосипеды.
 Тем самым было дано начало целой отрасли в промышленности производящей городские малые средства передвижения. Теперь разработчики Yamaha анонсировали выпуск компактных электродвигателей для мотоциклов, а также более мощного, но также небольшого по размерам, электродвигателя для автомобилей.
Тем самым было дано начало целой отрасли в промышленности производящей городские малые средства передвижения. Теперь разработчики Yamaha анонсировали выпуск компактных электродвигателей для мотоциклов, а также более мощного, но также небольшого по размерам, электродвигателя для автомобилей. Японские инженеры анонсировали экономный малогабаритный мотоциклетный электродвигатель мощностью 35 кВт, соответствующий требованием, предъявляемым к современным электромотоциклам. Именно двигатель такой мощности установлен на популярной модели Zero FXS. Вторым двигателем стал более мощный электромотор на 150 кВт, который предназначен для перспективного автомобиля с задним приводом.
Yamaha, по заявлению разработчиков, предлагает силовые блоки для мотоциклов, автомобилей и других транспортных средств, способные обеспечить уникально высокую удельную мощность. Таким образом компания заявила о намерении расширить ассортимент электрических велосипедов и мотоциклов, а также, в перспективе, и выпуск собственного электромобиля.
Значительное снижение массы и размеров двигателя, было достигнуто благодаря фирменным технологиям и инновационным конструкторским решениям. В результате будет уменьшена общая масса средств передвижения, что обеспечит им более высокие скоростные показатели, приведет к снижению потребления энергии, а также снизит производственные расходы, а как следствие и конечную цену продукции.
В настоящее время Yamaha не раскрывает свои дальнейшие планы по развитию электротранспорта и не сообщает конкретную дату выхода на рынок электротранспорта на сверхкомпактных электродвигателях.
Мощные электродвигатели постоянного тока TES Vsetin — серия S280, S315, S355, S400
Электродвигатели постоянного тока промышленной S — серии являются наиболее распространенными электромашинами постоянного и переменного тока, используемые в составе электроприводов технологического оборудования, которое было импортированного из ЧССР, позднее из Чехии и Словакии. В разное время электромоторы S-серии производились компаниями MEZ Vsetin, ZSE Praha, MEZ Servis, TES Vsetin.
В разное время электромоторы S-серии производились компаниями MEZ Vsetin, ZSE Praha, MEZ Servis, TES Vsetin.
Основными областями применения электродвигателей являлись электроприводы металлургических станов, бумагоделательных машин, резиносмесителей, каландров, испытательных стендов.
В настоящий момент наша компания готова предложить Вам поставку как оригинальных электродвигателей S – серии, так и их полных аналогов электродвигателей T-T Electric. В этом случае предложенный нами электродвигатель T-T Electric серий LAK, LAKC имеет полностью идентичные электротехнические параметры и габаритно-присоединительные размеры, что и оригинальный электромотор. При необходимости наши инженеры осуществляют настройку электроприводов. Применение аналога T-T Electric позволяет заказчику экономить минимум 10 – 15 % бюджета, при этом срок производства и доставки не превысит 5 – 6 недель (срок производства типового электродвигателя постоянного тока T-T Electric составляет 3 — 4 недели, срок производства электродвигателя TES Vsetin 8 – 10 недель).
Параметры электродвигателей постоянного тока серий S280-S400
- Номинальная мощность: 97 – 540 кВт;
- Номинальная скорость: до 3000 об/мин;
- Габаритная высота: 280 – 400 мм;
- Степень защиты: IP23, IP23S, IP44, IP54, IP55;
- Метод охлаждения: IC 05, IC06, IC17, IC37, IC410, IC86W;
- Класс изоляции: F, H.
Типоразмеры: S280S, S280M, S280L, S315S, S315M, S315L, S355S, S355M, S355L, S400S, S400M, S400L;
Дополнительные опции: датчики обратной связи (тахогенераторы, энкодеры, резольверы), датчики температуры (PTO, PTC, PT100 ), датчики измерения вибрации, датчики контроля износа щеток, пополнение смазкой подшипников, усиленные подшипники, адаптация клеммной коробки и др.
Изготовление по вашим габаритам: валов, крепежных фланцев, переходных плит, клеммных коробок и др.
По вопросам подбора электродвигателей постоянного тока TES Vsetin и их аналогов просим Вас обращаться к нашим инженерам по тел. +7(800) 333-47-37.
Электродвигатели постоянного и переменного тока T-T Electric — полные аналоги электродвигателей TES, MEZ Vsetin. Электродвигатели T-T Electric — лучшие условия сотрудничества для Вас: высочайшее качество, конкурентная стоимость, минимальные сроки поставки, гибкие условия оплаты.
Сплит Системы (Кондиционеры) : Настенные : Nocria™
Группа компаний Фуджицу Дженерал стремится сделать наш сайт доступным для разных функциональных возможностей
Однако, старые браузеры, такие как Netscape 4.x, не в состоянии должным образом поддерживать эти доступные виды страниц Страницы по-прежнему функционируют, но форматирование и картинки не отображаются должным образом
Приносим извинения за данные неудобства
Перейти к основному содержанию
Перейти к навигационной стороне
Перейти к дополнительной области
Навигационная цепочка начинается здесь
Основное содержание начинается здесь
Настенные
Характеристики
Модель
230В 1фазы
Характеристики
Мощная нисходящая струя воздуха в режиме нагрева
- *
- По сравнению с моделью ASY13PSCCW
Струя охлажденного воздуха не направена в сторону людей, находящихся в помещении
- *
- По сравнению с моделью ASY13PSCCW
Автоматическая очистка фильтра (Впервые в мире**)
- Автоматическая очистка фильтра уменьшает потребление энергии.

- Полная очистка фильтра занимает около 2 минут.
- Максимальная энергоэффективность (класс A).
- Два этапа очистки и деодорирования воздуха обеспечивают чистоту воздуха в помещении.
Технологии чистоты и энергосбережения
- [a] Фотокаталитический фильтр способствует уничтожению бактерий.*¹
- [b] Ультрафиолетовые излучатели уничтожают вирусы и обеззараживают воздух.
- [c] Автоматическая очистка фильтра значительно снижает потребление энергии.*²
Функция автоматической очистки позволяет экономить до 25% электроэнергии в год и обеспечивает равномерный поток воздуха благодаря постоянно чистым воздушным фильтрам. - [d] Вентилятор специальной конструкции и особые направляющие жалюзи создают исключительно широкий воздушный поток.
Вентилятор особого профиля и воздухораспределительные жалюзи уникальной конструкции создают равномерный и направленный поток воздуха значительно большей ширины, чем у стандартных моделей. Производительность вентилятора возросла на 10% в сравнении со стандартными моделями.
Производительность вентилятора возросла на 10% в сравнении со стандартными моделями. - [e] Мощный электродвигатель оригинальной конструкции.*³
Осевые зазоры электродвигателя Уникальный электродвигатель, оригинальной конструкции с осевыми зазорами, обеспечивает высокую производительность вентилятора.
Отличительные особенности (в сравнении с обычными моделями)
При тех же размерах мощность в 1,5 раза выше. Производительность вентилятора увеличена на 10%.
Воздушный фильтр перемещается через камеру для сбора пыли, где при помощи специальных сдвоенных щеточек производится его очистка. В зависимости от загрязненности воздуха, но не реже чем раз в 2 года, необходимо очищать камеру от собранной пыли.
- **
- Впервые представлена 9 сентября 2002 года для бытового кондиционера компанией Fujitsu.
- *¹
- Эффективность в два раза выше по сравнению с обычным фильтром.
 Длительное время сохраняет свои свойства; поглощает и удаляет около 99,99% сигаретного дыма, бактерий и др.
Длительное время сохраняет свои свойства; поглощает и удаляет около 99,99% сигаретного дыма, бактерий и др. - *²
- Данные на 9 сентября 2002 г. Исследование бытовых кондиционеров компании Fujitsu.
- *³
- Данные на 13 декабря 2004 г. Исследование электродвигателей вентиляторов в бытовых кондиционерах компании Fujitsu.
Левое меню начинается здесь
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Мощный электродвигатель для самолётов испытывают в Новосибирске
Новую силовую установку смонтировали на летающей лаборатории Як-40. Сейчас самолёт совершает пробежки по аэродрому. Специалисты оценивают, насколько слаженно электромотор работает с системами воздушного судна.
Специалисты оценивают, насколько слаженно электромотор работает с системами воздушного судна.
Александр Сульдин
18:04, 05 февраля 2021
Летающая лаборатория Як-40 с новейшим электродвигателем пробежала по новосибирскому аэродрому. Обычные турбины крылатой машины при этом работали. Это один из этапов лётных испытаний.
«На сегодняшних испытаниях мы проверяем совместное функционирование систем электрического двигателя с системами самолёта. Чтобы не было „наводок“, чтобы не было каких-то отклонений в работе систем самолёта.
Задача этой летающей лаборатории — проверка работоспособности системы двигателя и генератора во всём диапазоне скоростей от 150 до 600 километров в час. И высот от 0 метров до 9-9,5 километра», — рассказал директор СибНИА им. С. А. Чаплыгина Владимир Барсук.
С. А. Чаплыгина Владимир Барсук.
Фото: Ростислав Нетисов, nsknews.info
Ток для работы электромотора на летающей лаборатории получают от аккумуляторов и генератора, который вращается от обычной турбины.
Разработка уникальна — обмотки нового двигателя охлаждают жидким азотом до 200 градусов ниже нуля, в результате получили сверхпроводимость — сопротивление току снизили кардинально. Коэффициент полезного действия мотора — почти 100%.
Из-за этого он соответствует жёстким требованиям авиации — относительно мал и лёгок, однако развивает большую мощность.
«Это — историческое событие.
Все традиционные технологии авиации исчерпаны. Идёт очень жёсткая конкурентная борьба за будущее авиации. За региональную авиацию, за „зелёную“ авиацию. Это первый шаг к созданию электрического самолёта.
Двигателя на базе сверхпроводимости ни у кого в мире нет. За сотрудничеством по этой теме к нам обращаются и „Аэробус“, и „Сименс“», — отметил генеральный директор НИЦ «Институт им. Н. Е. Жуковского» Андрей Дутов.
Перспективную силовую установку начали разрабатывать в 2016 году в национальном исследовательском центре «Институт им. Н. Е. Жуковского». В создании прототипа участвовали несколько предприятий и научных институтов. В новосибирском СибНИА имени Чаплыгина проводят её испытания.
По планам, следующая летающая лаборатория с электродвигателями — Ил-114 — появится уже через два года. Подниматься в воздух она будет без помощи турбин. Ожидается, что серийные пассажирские электролёты могут появиться в 2030 году.
Использование электродвигателя на самолёте позволит исключить затраты на топливо, следовательно — снизить стоимость эксплуатации воздушных судов. А значит, повысить доступность региональной авиации.
#Авиа #Технологии #Городские технологии #Сделано в Новосибирске #Город знаний #Фотогалерея
Подписывайтесь на наши соц.сети
какие они бывают / Блог компании НПФ ВЕКТОР / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка.
 Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC).
 Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.

И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Siemens разрабатывает самый мощный электродвигатель в истории самолета
Компания Siemens представила новый авиационный электродвигатель, который по удельной мощности в пять раз мощнее других двигателей этого класса.
При весе всего 50 кг двигатель имеет постоянную выходную мощность 260 кВт, и компания Siemens считает, что новый двигатель откроет новые возможности для полетов с электроприводом.
Немецкая инжиниринговая фирма предполагает, что самолет с общим весом до 2 000 кг сможет приводиться в действие новым электродвигателем самолета.
Чтобы добиться такого значительного увеличения удельной мощности, компания Siemens тщательно изучила все части уже существующих электродвигателей в промышленных установках и электромобилях, а затем оптимизировала их до их технических пределов.
Примечательно, что новый электродвигатель самолета эффективно работает при скорости вращения около 2500 об / мин, что позволяет использовать его для привода воздушных винтов без трансмиссии.
«Это нововведение позволит строить серийные гибридно-электрические самолеты с четырьмя и более креслами», — сказал Франк Антон, глава подразделения eAircraft в Siemens Corporate Technology
.Гибридный самолет
В то время как новый двигатель может работать только от батареи, Сименс считает, что его более реалистично реализовать в так называемых «гибридных» самолетах.
Подобно гибридным автомобилям, в этих самолетах будет использоваться традиционная топливная силовая установка для обеспечения электроэнергией после того, как батареи разрядятся.
«Самолет заводился бы чисто от электричества; впоследствии небольшой двигатель внутреннего сгорания производил электричество для двигателя. Посадка снова может быть чисто электрической », — пояснил Флориан Мартини, представитель Siemens.
Компания «Сименс» вкладывает значительные средства в эту технологию: в 2013 году компания установила демонстрационный электродвигатель самолета в моторный планер DA36 E-Star 2, что доказывает осуществимость этой технологии.
Этот самолет с более ранним двигателем имел выходную мощность только 60 кВт.До конца года будут испытаны гораздо более мощные суда, построенные с использованием нового двигателя.
Компания надеется продолжить производство еще более мощных электродвигателей для самолетов, чтобы сделать гибридные самолеты реалистичным.
«Мы убеждены, что использование гибридных электрических приводов в региональных авиалайнерах вместимостью от 50 до 100 пассажиров — это реальная возможность в среднесрочной перспективе», — сказал Франк Антон.
Установленный на специально модифицированном грузовике, изделие для наземных испытаний LEAPTech, или испытательный стенд гибридных электрических интегрированных систем, будет двигаться со скоростью до 70 миль в час по сухому дну озера на базе ВВС Эдвардс — изображение любезно предоставлено НАСА.НАСА также работает над электрическими самолетами
Также сообщается, что НАСА работает над амбициозным планом, чтобы помочь «значительной части» авиационной промышленности перейти на электрические двигательные установки в течение следующего десятилетия.
Космическое агентство начало испытания концепции электрического самолета, в котором используется технология Leading Edge Asynchronous Propeller Technology (LEAPTech). Разработанное в сотрудничестве с Empirical Systems Aerospace (ESAero) и Joby Aviation, крыло LEAPTech оснащено 18 автономными электродвигателями, приводящими в действие 18 отдельных небольших пропеллеров, которые питаются от литий-фосфатных батарей.
Мощный электродвигатель для аккумуляторных бензопил
- Высокая режущая способность, как у бензинового двигателя
- Электромоторный привод с нулевым уровнем выбросов, без выхлопных газов
- Низкий уровень шума при работе для резки в условиях, чувствительных к шуму
- Простота использования и безопасность с защитой от перегрузки
Johnson Electric предлагает широкий спектр технологических платформ для двигателей переменного, постоянного и постоянного тока для производителей всех типов пил.Мы предоставляем ведущим производителям электроинструментов уникальные прикладные функции, необходимые для настольных и ручных инструментов. Прецизионные микровыключатели Johnson Electric для конкретных применений — выбор мировых лидеров в этом сегменте для обеспечения безопасности и определения положения.
Johnson Electric предлагает уникальные системные решения, начиная с широкого спектра инновационных платформенных технологий.
- Высокая режущая способность, как у бензинового двигателя
- Электромоторный привод с нулевым уровнем выбросов, без выхлопных газов
- Низкий уровень шума при работе для резки в условиях, чувствительных к шуму
- Простота использования и безопасность с защитой от перегрузки
Высокая надежность, высокая мощность и высокий КПД являются ключевыми характеристиками технологии двигателей Johnson Electric для применения в цепных пилах.Двигатели спроектированы для достижения высокой удельной мощности и низкого рабочего тока. Двигатели проходят всесторонние испытания, чтобы гарантировать, что их характеристики, надежность и надежность разработаны специально для соответствия требованиям конкретного применения.
Johnson Electric — лидер в технологии микропереключателей, выпускающий прецизионные микропереключатели под маркой Saia и микропереключатели промышленного класса под маркой Burgess. Наши микропереключатели доступны в сериях сверхминиатюрных, сверхминиатюрных, миниатюрных и стандартных.Микропереключатели этой серии подразделяются по номинальной мощности, температуре, рабочему усилию, экологическим характеристикам и упаковке. Многие переключатели специально спроектированы для конкретных промышленных приложений. Продукты Saia и Burgess выбираются лидерами отрасли, которым требуется 100% стабильная и точная производительность критически важных функций.
Наши продуктовые линейки постоянно развиваются, чтобы определить передовые технические характеристики и человеческий фактор.Мы постоянно интегрируем больше функций в наши решения и настраиваем человеческий интерфейс в соответствии с современными тенденциями в дизайне продуктов. Компания Johnson Electric R&D нацелена на постоянное дифференцирование наших клиентов.
Johnson Electric предлагает уникальные системные решения, начиная с широкого спектра инновационных платформенных технологий.
- Электроэнергия эквивалентна 2-сильному бензиновому двигателю
- Легкий запуск и простое управление
- На 15 дБА ниже уровень шума для бесшумной работы
- Решение для тяжелой работы дома и на ферме
Equipmake представляет самый мощный в мире электродвигатель
Equipmake известна своими мощными электродвигателями.Компания анонсировала самый мощный в мире электродвигатель. Электродвигатель, разработанный Equipmake, производит значительно большую мощность, чем электродвигатель Tesla, используемый в модели S.
Мы узнали Equipmake в 2018 году с его двигателем, который может производить 9 кВт мощности на килограмм, произведенный с использованием дешевых материалов и стандартных производственных процессов. Компания продолжала разрабатывать электродвигатели с 2018 года и с заявлением объявила, что разработала самый мощный в мире электродвигатель.
Equipmake продолжила работу над двигателем, разработанным в 2018 году, и разработала недавно представленный двигатель. Проведенные опытно-конструкторские работы дали очень важные результаты. Equipmake удалось произвести двигатель мощностью 220 кВт при весе менее 10 кг. Это означает выработку 10 кВт / кг мощности.
Все разработки в области технологии электромобилей сравниваются с технологией Tesla, которая занимает успешное место в этой области. По этой причине электродвигатель, разработанный Equipmake, также сравнивали с электродвигателями Tesla.
Последняя информация об электродвигателях Tesla опубликована шесть лет назад. Его все еще можно использовать в качестве справочника для сравнения. Электродвигатель, который использовался в Model S шесть лет назад, весил 32 кг и выдавал 270 кВт мощности. Это составляет примерно 8,4 кВт / кг. Электродвигатель, разработанный Equipmake, выглядит сильнее с точки зрения мощности, которую Model S может производить на килограмм, по сравнению с этим двигателем. В то же время разработанный двигатель значительно снижает нагрузку на автомобили, на которых он используется.
В своем заявлении о процессе разработки двигателя Equipmake объяснил, что технология трехмерной печати, которую они используют, позволяет использовать меньше металла в конструкции. В то же время эта технология печати позволяет комбинировать сложные формы, которые невозможно получить при литье. Охлаждающие свойства конструкции магнита двигателя позволяют магниту вращаться с очень высокой скоростью.
Equipmake надеется, что первый прототип будет работать в течение 12 месяцев. Ожидается, что электродвигатель будет использоваться на следующем электромобиле Ariel Hipercar.Многие люди хотят увидеть, что легкий и мощный двигатель обеспечивает высокую производительность автомобиля.
Yamaha представляет новый прототип электродвигателя мощностью 469 л.с.
В этом непритязательном алюминиевом корпусе находится очень мощный электродвигатель, который может приводить в движение электрические спортивные автомобили будущего.
ЯмахаЭто не совсем общеизвестно, но Yamaha проделывает огромную работу по разработке силовых агрегатов для других производителей автомобилей. Это помимо производства мотоциклов, пианино и множества других вещей. Toyota 2000GT? Головка блока цилиндров Yamaha. Volvo V8 от XC90? Это тоже была Yamaha. Ford Taurus SHO из 90-х? Абсолютно. Ямаха снова наносит удар.
Но Yamaha занимается не только разработкой двигателей внутреннего сгорания и их компонентов.У него есть свои когти в мире электромобилей, и, согласно объявлению, сделанному компанией в понедельник, он тоже делает чертовски хорошую работу. В частности, он предлагает компактную интегрированную электрическую силовую установку, которая развивает мощность более 469 лошадиных сил.
Подняться на место водителя
Подпишитесь на информационный бюллетень Roadshow, чтобы получать последние новости и обзоры автомобилей, которые будут отправляться вам на почту два раза в неделю.
Если вы не разбираетесь в цифрах, это большая мощность для одного двигателя.Это становится еще глупее, если учесть, что многие электромобили используют несколько двигателей. Но даже более примечательной, чем выходная мощность, является упаковка.
Компания Yamaha объединила все механические и электрические компоненты в один автономный блок, который может использовать для охлаждения масло или воду, в зависимости от потребностей клиента. Это означает, что с точки зрения дизайна и производства интегрировать его в автомобиль намного проще, чем искать повсюду места для дискретной электроники.
Последствия для электромобилей с высокими характеристиками, особенно от небольших производителей, огромны, даже если этот двигатель является только прототипом. Yamaha планирует продемонстрировать его вместе с другими прототипами электродвигателей на выставке Automotive Engineering Exposition 2021 в Иокогаме с 26 по 28 мая.
2021 Yamaha MT-09 имеет три цилиндра, два колеса и золотое сердце
Посмотреть все фотоСейчас играет: Смотри: Мотобот Yamaha ездит на мотоцикле, он круче нас…
5:56
Yamaha разработала 496-сильный мотор для электрических гиперкаров
Yamaha только что анонсировала электродвигатель, разработанный специально для электрических гиперкаров. Говорят, что компактный 800-вольтовый агрегат способен генерировать 496 лошадиных сил.Он был разработан с целью иметь несколько агрегатов, приводящих в действие одно и то же транспортное средство, поэтому транспортное средство, использующее даже два из этих двигателей, может быть невероятно мощным. Yamaha также подчеркивает компактный размер двигателя, который является результатом интеграции редуктора и инвертора в единое целое.
Это не единственный электродвигатель, разработанный Yamaha. Начиная с прошлого года, Yamaha начала расширять свой бизнес, включив в него разработку двигателей мощностью от 47 до 268 лошадиных сил. Меньшие по размеру агрегаты были созданы для личных транспортных средств и мотоциклов, а более мощные агрегаты предназначены для легковых автомобилей.Эти двигатели были заказаны другими компаниями для использования их соответствующих продуктов.
Несмотря на то, что Yamaha является отклонением от двигателей внутреннего сгорания для мотоциклов, создание прототипов силовых агрегатов для других компаний является естественным продолжением ее бизнеса. Yamaha уже давно производит бензиновые двигатели для других автопроизводителей, начиная с 1967 года с рядного шестицилиндрового двигателя с двумя распредвалами для Toyota 2000GT. На протяжении многих лет компания также разрабатывала высокооборотные двухкулачковые двигатели для мощных автомобилей, таких как Toyota AE86 и MR2, a 3.0-литровый DOHC V6 для всеми любимого спортивного седана Ford Taurus SHO и 4,4-литровый V8 для Volvo, установленный в S80 и XC90. Благодаря связям с Toyota двигатели Yamaha также нашли применение в спортивных автомобилях, таких как Lotus Elise. Совсем недавно он помог в разработке звучного V10 для Lexus LFA.
Что касается этого большого двигателя, компания заявляет, что с этого месяца принимает заказы на создание прототипов автомобилей. Электродвигатели были разработаны для простоты установки, но методы вывода и охлаждения могут быть адаптированы к конкретным приложениям клиента.Электромотор гиперкара дебютирует на выставке автомобильной техники 2021 года в Иокогаме, Япония, с 26 по 28 мая.
Видео по теме:
Институт — История — Изобретение электродвигателя 1800-1854
Унив. Проф. Д-р инж. Мартин Доппельбауэр
СводкаС изобретением батареи (Алессандро Вольта, 1800 г.), генерации магнитного поля из электрического тока (Ганс Кристиан Эрстед, 1820 г.) и электромагнита (Уильям Стерджен, 1825 г.) был заложен фундамент для создания электродвигателей.В то время было еще открытым вопрос, должны ли электродвигатели быть вращающимися или возвратно-поступательными машинами, то есть имитировать шток плунжера паровой машины.
Во всем мире многие изобретатели работали параллельно над этой задачей — это была проблема «моды». Новые явления открывались почти ежедневно. Изобретения в области электротехники и ее приложений витали в воздухе.
Часто изобретатели ничего не знали друг о друге и самостоятельно разрабатывали подобные решения.Национальная история формируется соответствующим образом до наших дней. Ниже приводится попытка дать исчерпывающую и нейтральную картину.
Первое вращающееся устройство, приводимое в движение электромагнетизмом, было построено англичанином Питером Барлоу в 1822 году (Колесо Барлоу).
После многих других более или менее успешных попыток с относительно слабым вращающимся и возвратно-поступательным устройством немецкоязычный прусский Мориц Якоби создал в мае 1834 года первый настоящий вращающийся электродвигатель , который на самом деле развил замечательную механическую выходную мощность.Его мотор установил мировой рекорд, который был улучшен только четыре года спустя, в сентябре 1838 года, самим Якоби. Его второй двигатель был достаточно мощным, чтобы переправить лодку с 14 людьми через широкую реку. Только в 1839/40 году другим разработчикам во всем мире удалось создать двигатели с аналогичными, а затем и с более высокими характеристиками.
Уже в 1833 году немец Генрих Фридрих Эмиль Ленц опубликовал статью о законе взаимности магнитоэлектрических и электромагнитных явлений, т.е.е. обратимость электрогенератора и двигателя . В 1838 году он дал подробное описание своих экспериментов с генератором Pixii, который он использовал в качестве двигателя.
В 1835 году двое голландцев Сибрандус Стратинг и Кристофер Беккер построили электродвигатель, который приводил в движение небольшую модель автомобиля. Это первое известное практическое применение электродвигателя. В феврале 1837 года первый патент на электродвигатель был выдан американцу Томасу Дэвенпорту.
Однако все ранние разработки Якоби, Стратинга, Давенпорта и других в конечном итоге не привели к электродвигателям, которые мы знаем сегодня.
Двигатель постоянного тока не был создан на основе этих двигателей, а был создан в результате разработки генераторов энергии (динамометров). Основы были заложены Уильямом Ричи и Ипполитом Пикси в 1832 году с изобретением коммутатора и, что наиболее важно, Вернером Сименсом в 1856 году с двойным Т-образным якорем и его главным инженером Фридрихом Хефнер-Альтенеком в 1872 году с помощью барабанная арматура. Двигатели постоянного тока по-прежнему занимают доминирующее положение на рынке в диапазоне малой мощности (ниже 1 кВт) и низкого напряжения (ниже 60 В).
В период с 1885 по 1889 год была изобретена трехфазная электроэнергетическая система , которая является основой для современной передачи электроэнергии и современных электродвигателей. Единого изобретателя трехфазной системы питания назвать нельзя. Есть несколько более или менее известных имен, которые принимали активное участие в изобретениях (Брэдли, Доливо-Добровольский, Феррарис, Хазельвандер, Тесла и Венстрём). Сегодня трехфазный синхронный двигатель используется в основном в высокодинамичных приложениях (например, в роботах) и в электромобилях.Впервые он был разработан Фридрихом Августом Хазельвандером в 1887 году.Очень успешный трехфазный асинхронный двигатель был построен Михаилом Доливо-Добровольским в 1889 году. Сегодня это наиболее часто производимая машина в диапазоне мощностей от 1 кВт и выше.
Расписание 1800 — 1834: Первые эксперименты с электромагнитными устройствами| 1800 | Впервые Allessandro Volta (итальянский) производит непрерывную электрическую энергию (в отличие от искры или статического электричества) из набора серебряных и цинковых пластин. |
| 1820 | Ганс Кристиан Эрстед (Дениш) обнаруживает генерацию магнитного поля электрическими токами, наблюдая за отклонением стрелки компаса. Это был первый случай, когда механическое движение было вызвано электрическим током. |
| 1820 | Андре-Мари Ампер (французский язык) изобретает цилиндрическую катушку (соленоид). |
| 1821 | Майкл Фарадей (британец) создает два эксперимента для демонстрации электромагнитного вращения. Вертикально подвешенный провод движется по круговой орбите вокруг магнита. | Вращающийся провод Фарадея, 1821 Фотография любезно предоставлена Отделом труда и промышленности Национального музея американской истории Смитсоновского института |
| 1822 | Питер Барлоу (Великобритания) изобретает прялку (колесо Барлоу = униполярная машина). | Колесо Барлоу, 1822 Philosophical Magazine, 1822, vol. 59 |
| 1825-1826 | William Sturgeon (Великобритания) изобретает электромагнит , катушку проводов с железным сердечником для усиления магнитного поля. | Первый электромагнит Стерджена, 1825 г. Труды Общества поощрения художеств, мануфактур и торговли, 1824 г., т.43, пл. 3 |
| 1827-1828 | Istvan (Ányos) Jedlik (венгерский) изобретает первую роторную машину с электромагнитами и коммутатором. Однако Джедлик публично сообщил о своем изобретении только десятилетия спустя, и фактическая дата изобретения неизвестна. До сих пор многие венгры верят, что Джедлик изобрел электродвигатели. Функциональная модель его аппарата выставлена в художественном музее в Будапеште. Хотя на самом деле это может быть первый электродвигатель, следует понимать, что это устройство не оказало влияния на дальнейшее развитие электрических машин. Изобретение Джедлика долгое время оставалось скрытым, и изобретатель не преследовал его. Электротехника ничем не обязана Джедлику. | Поворотное устройство Jedlik, 1827/28 Фото: Wikipedia Электромобиль Jedlik, 1827/28 Фото: Wikipedia |
| перед 1830 | Иоганн Михаэль Эклинг, механик из Вены, строит двигатель по планам и идеям проф.Андреас фон Баумгартнер (австрийский физик; с 1823 г. профессор физики и прикладной математики в Вене). Этот аппарат был приобретен в 1830 году Инсбрукским университетом по цене 50 жидких кубометров. Год постройки неизвестен, но должно быть до 1830 года, поскольку дата покупки подтверждена. | Двигатель Баумгартнера, построенный Эклингом до 1830 года Фотография любезно предоставлена Университетом Инсбрука, Музей экспериментальной физики, Ao.Univ. Проф. Маг. Доктор Армин Денот. |
| 1831 | Майкл Фарадей (Великобритания) обнаруживает и исследует электромагнитную индукцию, то есть генерацию электрического тока из-за переменного магнитного поля (инверсия открытия Эрстеда). Фарадей закладывает основы развития электрогенератора. |
| 1831 | Джозеф Генри (американец) находит закон индукции независимым от Фарадея и строит небольшой магнитный рокер.Он описывает это как «философскую игрушку». В статье для английского журнала Philosophical Magazine, в 1838 году англичанин Ф. Уоткинс подробно описывает устройство Генри и называет его первым электродвигателем, когда-либо известным. Эта точка зрения распространяется и по сей день в основном на британскую литературу. | Магнитный рокер Генри, 1831 Американский журнал науки, 1831, т. 20, стр. 342 |
| Апрель 1832 | Savatore dal Negro (итальянский) создает устройство, которое может поднять 60 граммов за одну секунду на 5 сантиметров и, следовательно, развивает механическую мощность почти 30 мВт. Вероятно, он был вдохновлен магнитным рокером Генри и создал аналогичную возвратно-поступательную машину. Однако устройство Даль Негро может производить движение с помощью специальной передачи. Даль Негро описывает свои эксперименты в письме от апреля 1832 года, а затем в научной статье « Nuova Macchina élettro-Magnetica » в марте 1834 года. | Электромагнитный маятник Даль Негро, 1832 Annali delle Scienze de Regno Lombardo-Veneto, März 1834, pl. 4 |
| июль 1832 | Первое публичное описание вращающейся электрической машины . Автор — анонимный писатель с инициалами П.М. Теперь его с большой вероятностью опознали как ирландца Фредерика Мак-Клинтока из Дублина. Майкл Фарадей, получатель письма 26 июля 1832 г., немедленно его публикует. Впервые публично описана вращающаяся электрическая машина. | Первое описание вращающейся электрической машины П.М., 1832 Philosophical Magazine, 1832, стр. 161–162 |
| июль 1832 | Hippolyte Pixii (французский язык) создает первый аппарат для генерации переменного тока из вращения. Устройство было публично представлено в сентябре 1832 года на заседании Académie des Sciences . Его описание напечатано уже в июльском номере Annales de Chimie . Pixii улучшил свое устройство в том же году, добавив переключающее устройство. Теперь он может производить пульсирующий постоянный ток. | Первый генератор постоянного тока Pixii, 1832/33 F.Niethammer, Ein- und Mehrphasen-Wechsel-strom-Erzeuger, Verlag S. Hirzel, Leipzig 1906 |
| 1832 | Уильям Ritchie (британский) сообщил в марте 1833 года об устройстве, которое, как он утверждал, было построено девятью месяцами ранее летом 1832 года. Это вращающийся электромагнитный генератор с четырьмя катушками ротора, коммутатором и щетками. Ричи считается изобретателем коммутатора. В конце своей статьи Ричи описывает, как он смог вращать электрический магнит, используя магнитное поле Земли. Он мог поднять вес на несколько унций (50-100 грамм). Коммутация производилась двумя концами провода, которые входили в два полукруглых желоба с ртутью. | Первый генератор постоянного тока с коммутатором, 1832/33 Вращающаяся катушка Ричи, 1833 Philosophical Trans.Лондонского королевского общества, 1833, Vol. 132, стр.316, пл.7 |
| Янв 1833 | A Доктор Шультесс читает лекцию в Обществе инженеров в Цюрихе в 1832 году, в которой описывает свои идеи электродвигателя. В январе 1833 года он успешно продемонстрировал машину перед тем же цюрихским обществом. Никаких подробностей не известно. | |
| Март 1833 | Осенью 1832 года William Sturgeon создает вращающееся электрическое устройство, которое он публично демонстрирует в марте 1833 года в Лондоне. Как и в случае с Джедликом, нет никаких определенных доказательств даты и деталей его строительства. Осетр сообщил об этом изобретении в 1836 году в первом выпуске своего собственного журнала. | Устройство вращения Осетровых, 1832 Анналы Осетровых по электричеству, 1836/37, т. 1 |
| Декабрь 1833 | В первые годы развития электротехники проводилось строгое различие между магнитно-электрическими машинами, т.е.е. электрические генераторы и электромагнитные машины, то есть электродвигатели. Генрих Фридрих Эмиль Ленц (немецкий) нашел « закон взаимности магнитоэлектрических и электромагнитных явлений », то есть обратимость электрического генератора и двигателя. Его научный текст читается в конце 1833 года в Петербургской Академии наук и опубликован в 1834 году в «Annalen der Physik und Chemie » Поггендорфа.Его идеи постепенно становятся обычным явлением, особенно в 1838 году после нескольких сообщений об успешных экспериментах по обращению. Иногда утверждают, что принцип обращения был открыт в 1861 году итальянцем Пачинотти или даже только в 1873 году случайно на Всемирной выставке в Вене. Оба утверждения ложны. Эмиль Ленц широко сообщил еще в 1838 году в «Annalen der Physik und Chemie » Поггендорфа, как он использовал генератор Pixii в качестве двигателя. |
| июль 1834 | Джузеппе Доменико Ботто (итальянец), профессор физики из Турина, в июле 1834 года публикует в женевском журнале Bibliotheque Universelle описание электродвигателя, над которым он работает. Его устройство соответствует метроному (похожему на конструкции Генри и Даль Негро), действующему на маятник с помощью двух электромагнитов.Вращательное движение создается штоком поршня. Реплика устройства сейчас выставлена в Museo Galileo во Флоренции. | Роторная машина Ботто, июль 1834 г. (реконструкция) Фото любезно предоставлено Museo Galileo, Флоренция |
| Май 1834 | Мориц Герман Якоби (немецкоязычный прусский, натурализованный русский) начинается с экспериментов с подковообразным электромагнитом в начале 1833 года в Кенигсберге (тогда Пруссия, ныне Россия).В январе 1834 года он пишет в письме Поггендорфу, редактору журнала Annalen der Physik und Chemie , о своих успехах. Он переходит к созданию электродвигателя, которое он завершает в мае 1834 года. Его двигатель поднимает вес от 10 до 12 фунтов со скоростью один фут в секунду, что эквивалентно примерно 15 ваттам механической мощности. Якоби прямо заявил в меморандуме 1835 года, что он не единственный изобретатель электромагнитного двигателя. Он указывает на приоритет изобретений Ботто и Даль Негро. Однако Якоби, несомненно, был первым, кто создал пригодный для использования вращающийся электродвигатель. Полнофункциональная копия его двигателя выставлена в Институте электротехники (ETI) Технологического института Карлсруэ (KIT) по адресу Engelbert-Arnold-Strasse 5 (Building 11.10) в Карлсруэ, Германия. | Первый настоящий электродвигатель Мориц Якоби, Кенигсберг, май 1834 года |
| Октябрь 1834 | Американец Т. Edmundson создает электромагнитное вращающееся устройство, напоминающее водяное колесо. | Электромагнитное колесо Эдмундсона Американский журнал науки, 1834, т. 26, стр. 205 |
| 1834-1835 | В декабре 1833 года кузнец Томас Давенпорт (американец) покупает соленоид непосредственно у Джозефа Генри и начинает эксперименты вместе с Orange Smalley (американец) в мастерской в Форестдейле, штат Вермонт. В июле 1834 года двое мужчин создают свою первую роторную машину. Они улучшают устройство в несколько этапов, прежде чем впервые публично продемонстрировать его в декабре 1834 года. В следующем году Давенпорт отделяется от Смолли. Летом 1835 года Давенпорт едет в Вашингтон, округ Колумбия, чтобы продемонстрировать свою машину в патентном бюро и зарегистрировать ее. Однако из-за отсутствия денег ему пришлось безуспешно вернуться домой. | Первый двигатель Давенпорта из его первой заявки на патент в июне 1835 года |
| Август 1835 | Фрэнсис Уоткинс (британец) создает электрическую «игрушку», с помощью которой он может приводить во вращение несколько магнитных игл. Он описывает устройство в статье для журнала Philosophical Magazine . Он признается, что его вдохновила электромагнитная машина (генератор) Джозефа Сакстона, которая выставлена в публичной галерее в Лондоне с августа 1833 года. Watkins можно считать одним из первых, кто понял принцип реверсирования двигателя и генератора. | Игрушка Уоткина, 1835 Philosophical Magazine , 1835, vol. 7, стр. 112 |
| 1835 | Sibrandus Stratingh и Christopher Becker (голландский) создают небольшой (30 x 25 см) трехколесный автомобиль с электрическим приводом и весом около 3 кг.Он может проехать по столу от 15 до 20 минут, пока батарея не разрядится. Stratingh и Becker публикуют отчет о своем успехе в том же году. Стратинг знал работы Якоби и в 1840 году хотел построить настоящий электромобиль, но ему это так и не удалось. | Электромодель Стрейтинга и Беккера, 1835 год |
| Май 1836 | Johann Philipp Wagner (немецкий) представляет электродвигатель на Stiftungsfest из Sencken-bergischen naturforschenden Gesellschaft .Его аппарат похож на устройство, созданное Стратингом и Беккером. Он может работать около 10 минут, пока батарея не разрядится. Вагнер хранит свою конструкцию в секрете, поэтому есть отчеты о демонстрации, но нет чертежей машины. В последующие годы Вагнер продолжает развивать свой двигатель и публично демонстрирует улучшенные версии. |
| 1836 1837 | Davenport продолжает совершенствовать свои устройства.В 1836 году он находит нового партнера в лице Ransom Cook и переезжает в Саратога-Спрингс, штат Нью-Йорк, для дальнейшего развития своих двигателей. С помощью Кука он строит модель патентного бюро. 24 января 1837 года Давенпорт подает в Вашингтон свое предостережение, а 5 февраля 1837 года он получает первый в США патент на электродвигатель: « Усовершенствование движущей силы с помощью магнетизма и электромагнетизма ». Его модель двигателя сейчас выставлена в Смитсоновском институте в Вашингтоне, округ Колумбия. В запатентованной конструкцииDavenport используются четыре вращающихся электромагнита, которые переключаются с помощью коммутатора, и постоянные постоянные магниты в форме кольца, сделанные из мягкого железа. Усовершенствованный двигатель, который он представляет в августе 1837 года, имеет диаметр 6 дюймов, вращается со скоростью около 1000 оборотов в минуту и может поднять 200-фунтовый груз на один фут за одну минуту. Это соответствует мощности 4,5 Вт. Давенпорт в последующие годы постоянно совершенствовал свои конструкции. Вместе с Эдвином Уильямсом из Нью-Йорка и его партнером Рэнсомом Куком , Давенпорт 3 марта 1837 года формирует объединенную акционерную ассоциацию. Однако Уильямс не может продать достаточное количество акций, и все предприятие рушится всего через год . | Запатентованный двигатель Давенпорта, февраль 1837 г. |
Томас Дэвенпорт — изобретатель электродвигателя?
Есть несколько текстов пафоса в американо-американской литературе, в которых Томас Дэвенпорт прославляется как изобретатель электродвигателя.Это утверждение основано на бесспорном факте, что Давенпорт был первым американцем, который создал пригодный для использования электродвигатель, а также первым, кто получил патент на такое устройство в начале 1837 года.
ОднакоDavenport был далеко не первым, кто построил электродвигатель. В Европе (особенно в Англии, Италии и Пруссии) технологии были уже значительно продвинуты. Уже летом 1834 года, за три года до патента, Мориц Якоби представил двигатель, который был в три раза мощнее усовершенствованной машины, которую Давенпорт разработал через несколько месяцев после подачи заявки на патент.Вдобавок мотор Давенпорта работал быстрее, чем у Якоби. Таким образом, выходной крутящий момент двигателя Давенпорта, решающий фактор при сравнении электрических машин, составлял лишь около одной десятой от конструкции Якоби, разработанной тремя годами ранее.
В 1835 году, вскоре после появления двигателя Якоби, двое голландцев Стрейтинг и Беккер уже представили первое практическое применение, управляя небольшой электромобилем.
За годы, прошедшие после патента Давенпорта, продвижение Якоби практически не уменьшилось.В то же время, когда Якоби продемонстрировал свою следующую машину осенью 1838 года, двигатель, который имел выходную мощность 300 Вт и мог вести лодку с 14 людьми через широкую реку, Давенпорт показал крошечную модель поезда.
МоторДавенпорта не примечателен в историческом контексте. Его конструкция не является существенным улучшением других современных конструкций.
За прошедшие годы Давенпорт произвел большое количество машин.Но в отличие от Вернера Сименса, Джорджа Вестингауза и Томаса Эдисона он не был основателем важной компании. И в отличие от Николы Теслы, например, Томас Давенпорт никогда не мог продать или лицензировать свой патент.
Давенпорт не получил патент на электродвигатель как таковой, а только на его особые конструктивные особенности. В период с 1837 по 1866 год только в Англии другим изобретателям было выдано около 100 патентов на электродвигатели. После того, как Давенпорт модернизировал свой двигатель уже в 1837 году, его патент стал практически бесполезным.
Davenport — это честь быть первым из тысяч инженеров, получивших патент на электродвигатель. Но он не является их изобретателем, и его разработки не оказали существенного влияния на дальнейшее развитие электродвигателей.
Расписание 1838 — 1854 гг .: более мощные двигатели, новые применения
| февр. 1838 | Уоткинс публикует обширную статью в Philosophical Magazine , где он представляет свой двигатель. | Двигатель Уоткина, февраль 1838 г. Philosophical Magazine, 1838, vol. 12, пл. 4 |
| Август 1838 | В августе 1838 года в Лондоне выставлена крошечная модель поезда с одним из двигателей Davenport . Он движется со скоростью 3 мили в час. | Модель поезда Давенпорта, 1838 Фото любезно предоставлено Отделом труда и промышленности Национального музея американской истории Смитсоновского института. |
| сен. 1838 | Якоби переезжает в Санкт-Петербург в августе 1838 года по просьбе русского царя. Он был принят в Петербургскую Академию наук и щедро поддержан царем в его дальнейшей работе над электродвигателями. 13 сентября 1838 года Якоби впервые демонстрирует на Неве лодку с электрическим приводом и гребными колесами длиной около 8 м. Цинковые батареи имеют 320 пар пластин и весят 200 кг.Они размещены вдоль двух боковых стенок сосуда. Мотор развивает мощность от 1/5 до 1/4 л.с. (300 Вт), лодка движется со скоростью 2,5 км / ч по маршруту длиной 7,5 км. Он может перевозить более десятка пассажиров. Якоби целыми днями разъезжает по Неве. В современных газетных статьях говорится, что после двух-трех месяцев работы потребление цинка составило 24 фунта. | Улучшенный мотор Якоби, 1838 |
| 1838 | Чарльз Г. Page (американец) начинает всю жизнь заниматься электромоторами. В течение следующих 20 лет Пейдж будет искать лучшие и более мощные машины. Его двигатели продавались по каталогам в США и достигли высокого уровня осведомленности общественности. Раньше многие изобретатели электродвигателей имитировали паровые двигатели с качающимся (возвратно-поступательным) поршнем. Пейдж тоже строит такую машину (см. Справа), но затем обращается к вращающимся устройствам. | Первый двигатель Пейджа, 1838 Американский журнал науки , 1838, т. 35, стр. 264 |
| Август 1839 | 8 августа г. Якоби испытывает усовершенствованный электродвигатель, механические характеристики которого в три-четыре раза превосходят его вторую машину 1838 года (около 1 кВт).Его лодка сейчас развивает скорость 4 км / ч. По словам Уильяма Роберта Гроува, ключевым фактором его успеха является улучшенная цинк-платиновая батарея, которую он сделал сам. В октябре 1841 года Якоби снова демонстрирует усовершенствованный двигатель, который, однако, лишь немного превосходит модель 1839 года. Это последний электродвигатель, построенный Якоби. Теперь он обращается к теории электродвигателей, а затем переходит к другим электрическим явлениям. |
| 1837- 1842 | Роберт Дэвидсон (Шотландия) также занимается разработкой электродвигателей с 1837 года.Сделал несколько приводов для токарного станка и модельных машин. В 1839 году Дэвидсон руководит постройкой первого автомобиля с электрическим приводом. В сентябре 1842 года он совершает пробные пробеги на 5-тонном локомотиве длиной 4,8 м на железнодорожной линии Эдинбург — Глазго. Его двигатель развивает около 1 л.с. (0,74 кВт) и развивает скорость 4 мили в час (6,4 км / ч). | Первый электровоз Дэвидсона, 1839 От Т.du Moncel, Электричество как движущая сила , Лондон, 1883 г., рис. 32 |
В последующие годы начинается поток патентов на электромагнитные машины — около 100 в одной только Англии с 1837 по 1866 год.
Среди изобретателей, занимающихся электродвигателями: Джеймс Джоуль (англ., 1838 г.), Уильям Тейлор (англ., 1838 г.), Урайа Кларк (1840 г.), Томас Райт (1840 г.), Уитстон (англ., 1841 г.) , де Гарлем (ab 1841), П.Элиас (американец, ab 1842), Дж. Фромент (французский, ab 1844), Моисей Г. Фармер (американец, ab 1846), GQ Colton (американец, ab 1847), Hjorth (ab 1849), Томас Холл (американец в США, около 1850 г.), Т. К. Эйвери (около 1851 г.), Сорен Хьорт (датчанин, около 1851 г.), Дю Монсель (француз, около 1851 г.), Мари Дэви (француз, около 1855 г.), Пачинотти (Италия, около 1855 г.) 1861)
и другие.
Изначально идет соревнование между колебательными (возвратно-поступательными) и вращательными машинами. Позже колебательные машины полностью исчезают из поля зрения.
Основная проблема первых электродвигателей заключалась в том, что электрический ток от гальванических элементов (цинковых батарей) был слишком дорогим, чтобы конкурировать с паровыми двигателями. Р. Хант сообщил в 1850 году в журнале British Philosophical Magazine , что электроэнергия даже в самых лучших условиях в 25 раз дороже, чем паровая машина. Только с продолжающейся разработкой электрогенератора (динамо-машины) ситуация начинает меняться.
| 1840 | 18 января 1840 года выходит первое издание новой газеты Давенпорта, Electro Magnet and Mechanics Intelligencer . Печатный станок приводится в движение двумя собственными моторами. Моторы выдают якобы около 2 л.с., что составляет около 1,5 кВт. |
| 1841- 1844 | По инициативе Вагнера, Германская Конфедерация под руководством Пруссии, Баварии и Австрии устанавливает в 1841 году приз в размере 100000 гульденов за создание электрической машины, мощность которой дешевле, чем мощность лошади, пара или человека. мощность. Конечно, эта цена привлекает других изобретателей, которые параллельно с Вагнером начинают работать над электродвигателем. Среди них господин Карл Людвиг Althans из Бюкебурга недалеко от Миндена, Эмиль Stöhrer из Лейпцига, Эмиль Groos из Карлсруэ и Петер Bauer из Нюрнберга. В частности, в 1843 году Штёрер конструирует замечательную машину. При исследовании последней машины Вагнера в мае и июне 1844 г. во Франкфурте-на-Майне федеральная комиссия определила мощность всего в 50 Вт.Потребление цинка настолько велико, что лошадь, пар и рабочая сила значительно дешевле. Из-за этой неудачи Вагнеру отказывают в цене, и он впадает в немилость. Без мощного электрогенератора это соревнование невозможно было бы выиграть, и человечеству пришлось ждать еще 25 лет. |
| 1851 | Page увеличивает мощность двигателей с 8 до 20 л.с. С двумя двигателями он ведет 10-тонный локомотив с максимальной скоростью 30 км / ч. Он путешествует по маршруту из Вашингтона в Бладенбург за 19 минут. |
| 1854 | Другой, 12-тонный локомотив Пейджа едет по маршруту Балтимор — Огайо. |
Equipmake для разработки сверхлегкого, более дешевого и наиболее энергоемкого электродвигателя
Говоря о развитии электромобилей, специалисты часто говорят об увеличении удельной (на килограмм веса) емкости тяговых аккумуляторов.Они все еще ищут оптимальное решение, считая современные аккумуляторы самым слабым местом электромобилей. Однако инженеры прилагают не меньшие усилия для улучшения электродвигателей.
Последний проект в этой области набирает обороты. Британские компании Equipmake и HiETA объявили о разработке самого мощного в мире двигателя с постоянными магнитами с точки зрения веса под названием «Ampere». Цель состоит в том, чтобы создать сверхлегкий, мощный, эффективный и экономичный электродвигатель, напечатанный на 3D-принтере, с пиковой плотностью тока более 20 кВт / кг.Это плотность более чем в четыре раза выше, чем у обычного электродвигателя.
В новом двигателе будет использован опыт Equipmake в области проектирования электродвигателей и знания HiETA в области теплотехники и аддитивного производства. Что касается Ampere, Equipmake и HiETA сосредоточены на пиковой мощности 220 кВт при 30 000 об / мин и массе менее 10 кг (22 кВт / кг).
Для сравнения, даже лучшие стандартные двигатели в этой категории с трудом достигают 5 кВт / кг.Мощный электродвигатель APM 125 от Equipmake весит 14 кг и выдает 125 кВт при 12 000 об / мин. Он имеет удельную мощность чуть менее 9 кВт / кг.
Ключом к характеристикам Ampere является сочетание передовой конструкции двигателя с аддитивным производством, позволяющее печатать металлическую конструкцию в 3D, а не фрезеровать ее из цельного блока. Это дает много преимуществ.
Во-первых, металл используется только там, где он нужен. Во-вторых, термически эффективные тонкие стенки и оптимизированные мелкие детали поверхности можно напрямую комбинировать со структурой двигателя.В результате несколько частей заменяются единой сложной архитектурой. Он имеет исключительную охлаждающую способность, легкий, имеет низкую инерцию и делает возможным более высокие скорости.