Скорая помощь «роботу»
Скорая помощь «роботу»
Восстановление рабочих параметров
Роботизированные коробки передач являются симбиозом автоматических и механических трансмиссий. Они обеспечивают комфортное управление автомобилем. Практика использования «роботов» выявила их преимущества и недостатки. В их числе заметное влияние износа механики на работу коробки передач. Управление трансмиссией осуществляется бортовым компьютером автомобиля. Это предполагает своего рода обучение коробки робота подчиняться командам управления. Эксплуатация автомобиля приводит к неизбежному износу коробки передач. При этом заводские настройки трансмиссии становятся помехой нормальной работе роботизированного силового агрегата.
Корректировка настроек трансмиссии имеет официальный термин «адаптация». В среде автолюбителей и в автосервисе, эту процедуру назвали «обучить коробку робот». В бортовой компьютер заложены унифицированные алгоритмы переключения передач. Их активация происходит по сигналам входных датчиков, установленных в коробке. По мере износа деталей трансмиссии датчики передают искаженные сигналы. Они могут неверно восприниматься бортовым компьютером. В результате происходят задержки переключения передач, рывки, провалы. Не исключена даже полная блокировка трансмиссии. Единственное решение таких проблем – обучение коробки робота. Процедура по своей сути является перепрошивкой электроники автомобиля, позволяющей восстановить рабочие параметры трансмиссии.
По мере износа деталей трансмиссии датчики передают искаженные сигналы. Они могут неверно восприниматься бортовым компьютером. В результате происходят задержки переключения передач, рывки, провалы. Не исключена даже полная блокировка трансмиссии. Единственное решение таких проблем – обучение коробки робота. Процедура по своей сути является перепрошивкой электроники автомобиля, позволяющей восстановить рабочие параметры трансмиссии.
Роботизированная коробка передач – виды, устройство, принцип работы, корректировка настроек
Роботизированные трансмиссии разрабатываются на базе механических коробок передач. Это ставит их в один ряд по уровню ремонтопригодности и другим эксплуатационным характеристикам, облегчающим жизнь автолюбителя. Роботы обеспечивают экономный расход топлива. Им надо меньше трансмиссионного масла. Водитель сам выбирает удобный для себя и/или оптимальный для двигателя режим переключения передач. В настоящее время роботизированные КПП представлены следующими видами трансмиссий. С электрическими и гидравлическими исполнительными механизмами, и с двойным сцеплением.
С электрическими и гидравлическими исполнительными механизмами, и с двойным сцеплением.
Электрические механизмы (сервоприводы) есть, например, на автомобилях «Тойота» (MultiMode), «Опель» (Easytronic). Намного большее распространение получили роботы с гидравлическим исполнительным механизмом – Dualogic (ФИАТ), SMG и DCT (БМВ), Senso Drive (Ситроен). Роботизированные трансмиссии с двойным сцеплением S-Tronic (Ауди) и DSG (Фольксваген и Шкода) по принципу действия ближе к АКПП. Коробки с сервоприводом самые «задумчивые». У них продолжительность цикла переключения передач может достигать двух секунд при обычной скорости срабатывания 0,3-0,5 сек. Роботы с гидравликой и двойным сцеплением переключают передачи за 0,05-0,2 сек.
Переключением передач роботизированной трансмиссии в автоматическом режиме занимается бортовой компьютер по сигналам датчиков. Полуавтоматический режим только имитирует работу механической коробки. Здесь роль датчиков выполняет водитель, а исполнительными механизмами (актуаторами) управляет компьютер. Программировать коробку робот при наличии соответствующего оснащения не так сложно. Его предоставляют только в распоряжение СТО, входящих в дилерскую сеть производителя. Приобрести это оборудование для себя нельзя. Корректировка настроек робота необходима не только вследствие естественного износа коробки, но и после любого вмешательства в трансмиссию. Эту процедуру иногда приходится делать и под стиль вождения.
Программировать коробку робот при наличии соответствующего оснащения не так сложно. Его предоставляют только в распоряжение СТО, входящих в дилерскую сеть производителя. Приобрести это оборудование для себя нельзя. Корректировка настроек робота необходима не только вследствие естественного износа коробки, но и после любого вмешательства в трансмиссию. Эту процедуру иногда приходится делать и под стиль вождения.
Особенности вождения автомобиля с роботом – дорожные условия, сравнение с другими трансмиссиями
Роботизированная коробка в сравнении с другими трансмиссиями – автоматической, механической, вариатором – сущий младенец. На серийных автомобилях она появилась около 20 лет назад, поэтому ей пока еще присущи «детские болезни». У производителей автомобилей принято программировать коробку робот с учетом обычных дорожных условий и стиля вождения. По этой причине управлять автомобилем с роботом в пробках или в сложных дорожных условиях не так просто. В таких ситуациях водитель должен «чувствовать» машину, что приходит с большим опытом вождения.
Поскольку переключение передач роботизированной трансмиссии происходит медленнее и сказывается на динамических характеристиках автомобиля. Это требует от водителя большего внимания при маневрировании. Неопытные водители и любители агрессивного стиля езды могут легко «сжечь» сцепление, если не обучить коробку робот особенностям вождения. По мнению экспертов, лучшими характеристиками обладают трансмиссии с двойным сцеплением. Они ближе других к традиционным навыкам вождения.
В сравнении с другими видами трансмиссий у робота есть свои преимущества. Он обеспечивает снижение расхода топлива на 7-10% в сравнении с МКПП. Роботу требуется в 3,5-5 раз меньше масла, чем АКПП. Он намного проще, чем вариатор. Однако конструкторам еще есть над чем работать. Необходимо улучшать динамические характеристики. Следует повышать защищенность трансмиссии при езде в сложных дорожных условиях и ее надежность. Сегодня РКПП требует довольно специфических навыков вождения. Поэтому покупатели относятся к таким автомобилям с определенным недоверием.
Процедура обучения коробки робот – обращение за помощью, содержание работ, периодичность
Если с машиной все в порядке, посещение сервиса определяется регламентом ТО автомобиля, стилем вождения и ресурсом сцепления коробки передач. У РКПП в зависимости от модели машины он составляет 100-180 тыс. км. Обычной причиной обращения в автосервис являются ощутимые «провалы» во время переключения передач. К этому приводит износ коробки или нарушения настроек исполнительных механизмов. В случае поломок робота, когда коробка осталась на передаче, автомобилю обязательно нужен эвакуатор. При обращении в автосервис «РАСТО» данная услуга предоставляется бесплатно. Кроме того мы обучаем коробку робот по очень привлекательной цене.
Звоните в любое время на круглосуточный телефон +7 (495) 778-44-45. Заказывайте нужные услуги. Часть из них может быть предоставлена в режиме «скорой помощи». Процедура обучения (адаптации) робота состоит из трех этапов. Она не занимает много времени. Сначала выполняется гидравлическая прокачка сцепления. После этого настраивают работу исполнительных механизмов. На завершающем этапе проводится синхронизация работы всех элементов РКПП и практическая проверка переключения передач. Разумеется, что все операции выполняются под контролем компьютера станции диагностики.
После этого настраивают работу исполнительных механизмов. На завершающем этапе проводится синхронизация работы всех элементов РКПП и практическая проверка переключения передач. Разумеется, что все операции выполняются под контролем компьютера станции диагностики.
При надлежащем уходе и соблюдении технического регламента вы в полной мере сможете ощутить все достоинства РКПП. Эксплуатационные расходы и траты на ремонт робота несопоставимо ниже, чем у АКПП или вариатора. Автолюбители с хорошим опытом вождения легко определят момент, когда придет время обучить коробку робот. Мы еще раз приглашаем в автосервис «РАСТО» владельцев автомобилей с РКПП. Гарантируем качественное обслуживание по разумным ценам.
Роботизированная коробка Тойота: принцип работы коробки Toyota
За основу трансмиссии Freetronic была взята традиционная «механика» оснащенная электроприводами. Другое известное название «робота» Freetronic — ММТ (Multimode). Роботизированная трансмиссия может работать как в режиме «автомат», так и в ручном режиме.
Переключение передач в трансмиссии происходит при помощи трех электродвигателей. Один из них отвечает за выключение (выжим) сцепления, а два других за смену передач. Работой приводов управляет электронный блок управления (ТСМ), путем обработки сигналов с бесконтактных датчиков.
Трансмиссией Freetronic комплектовались автомобили марки Toyota с 2005 по 2009 гг. Это такие модели как: Corolla, Auris, Yaris, Aygo,Echo, Prius и другие. На моделях Yaris и Echo концерн Тойота впервые стал устанавливать автоматическое сцепление TFT.
Общее устройство
1 — индикатор в автомобиле, 2 — концевой выключатель рычага КПП, 3 — привод, 4 — датчик 1-2, 5 — датчик заднего хода, 6 — датчик нейтрали, 7 — датчик частоты вращения (КПП), 8 — датчик положения сцепления, 9 — электронный блок управления MMT — Фритроник.
Выключение и включение сцепления TFT в трансмиссии Freetronic происходит путем управления величиной давления жидкости, которая подводится к главному цилиндру сцепления. Коробка переключения передач оснащена датчиками, одни из которых следят за реальным положением селектора передач, а другие измеряют частоту вращения первичного вала КПП. Рычаг переключения оснащен концевыми выключателями упреждающими блок управления о намерениях водителя задействовать рычаг коробки переключения передач. При наличии неисправностей на панели приборов начинает мигать индикатор. Индикатор также сигнализирует водителю при его попытке неверного переключения.
Коробка переключения передач оснащена датчиками, одни из которых следят за реальным положением селектора передач, а другие измеряют частоту вращения первичного вала КПП. Рычаг переключения оснащен концевыми выключателями упреждающими блок управления о намерениях водителя задействовать рычаг коробки переключения передач. При наличии неисправностей на панели приборов начинает мигать индикатор. Индикатор также сигнализирует водителю при его попытке неверного переключения.
- До запуска двигателя сцепления всегда включено
- Пуск. После поворота ключа в положение зажигание (положение КПП – нейтраль) блок ММТ выполняет «выжим» сцепления и можно запускать двигатель
-
Начало движения. При включении первой передачи или передачи заднего хода и нажатии педали газа, блок ММТ мгновенно получает информацию об этом путем сигнала от датчиков и выдает команду золотниковому клапану на понижение давления, что ведет к включению сцепления и автомобиль трогается.
 Для плавного включения сцепления клапан золотника открывается постепенно, и полное его включение происходит после выравнивания частоты вращения коленвала и первичного вала КПП. Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
Для плавного включения сцепления клапан золотника открывается постепенно, и полное его включение происходит после выравнивания частоты вращения коленвала и первичного вала КПП. Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
- Смена передач. При отпускании педали газа и изменении положения рычага КПП, соответствующие датчики сообщают об этом в блок ММТ. Блок дает команду на «выжим» сцепления. Дальнейшее включение сцепления происходит после получения сигналов от датчиков нейтрали и «концевиков» рычага.
- Остановка. В момент торможения автомобиля входной вал КПП начинает вращаться с меньшим числом оборотов (ниже заданной нормы) и блок управления TFT выполняет «выжим» сцепления.
-
Зуммер. Включается при возникновении внештатных ситуаций: ошибка при переключении вниз, попытка начала движения с передачи выше 3-й, чрезмерная нагрузка на сцепление, попытка запуска при включенной передаче, открыта дверь водителя при запущенном двигателе и положении рычага селектора соответствующее движению вперед или назад ( не нейтраль).

Что такое робот Pick and Place и как он работает?
Последнее обновление: Эндрю Лайтстед, 19 апреля 2022 г. 9 минут, проведенных с пользой
Пищевая промышленность и упаковочная промышленность развиваются быстрыми темпами. Чтобы удовлетворить растущие потребности и необходимую эффективность, производители используют робототехнику для выполнения задач, которые в противном случае потребовали бы специального ручного труда.
Роботы для захвата и размещения являются одними из наиболее часто используемых автоматизированных машин на рабочем месте по упаковке пищевых продуктов.
В этой статье вы узнаете все о роботах для захвата и размещения, что они из себя представляют, и даже о различных областях применения и типах этих роботов. Начнем наше исследование прямо сейчас.
Что такое робот Pick and Place?
Роботы Pick and Place позволяют компаниям использовать автоматизированные решения для подъема объектов из одного места и размещения их в других местах.
Простые задачи, такие как подъем предметов или их перемещение, не требуют много мыслительных процессов. Следовательно, использование людей для выполнения этих задач может быть расточительным, поскольку рабочую силу можно использовать для других задач, требующих более высоких умственных способностей.
Эти повторяющиеся задачи выполняются роботами-подборщиками. Эти роботы часто оснащены датчиками и системами технического зрения для подъема объектов с движущейся конвейерной ленты.
Кто изобрел роботов Pick and Place?
Роботы захвата и размещения, используемые в настоящее время для монотонных задач в пищевой упаковочной промышленности, основаны на роботах Delta. Дельта-роботы были разработаны в начале 1980-х годов исследовательской группой под руководством профессора Реймонда Клавеля из EPFL, Швейцария.
Массовое производство упаковочных роботов началось в 1987, когда швейцарская компания Demaurex приобрела лицензию на создание этих роботов.
В 1999 году компания ABB Flexible Automation выпустила дельта-робот FlexPicker, который изменил правила игры в этой области.
Область роботов для захвата и размещения все еще развивается, и исследователи оптимизируют этих роботов для захвата еще более мелких предметов для компьютерных процессоров или для выполнения повторяющихся задач с более высокой скоростью и точностью.
Как работают роботы Pick and Place?
Существует несколько конструкций роботов для захвата и размещения в зависимости от конкретного применения, для которого они используются. Основной принцип большинства этих конструкций — схожие линии.
Эти роботы обычно устанавливаются на устойчивой стойке и имеют длинную руку, которая может достигать всей рабочей зоны. Конец крепления руки специализирован для типа объектов, которые робот намеревается перемещать.
Эти роботы могут перемещать предметы со стационарной поверхности на неподвижную поверхность, с неподвижной на движущуюся поверхность, перемещаться на неподвижную поверхность и перемещаться на движущуюся поверхность (например, между двумя конвейерными лентами).
На скольких осях может происходить движение традиционного робота «сбори и помести»?
Простые роботы для захвата и размещения, которые поднимают предметы и размещают их в других местах, оснащены манипулятором с 5 осями. Однако также используются 6-осевые роботы-манипуляторы, которые могут поворачивать предметы для изменения их ориентации.
Из каких частей состоит робот-подборщик?
Робот-манипулятор состоит из нескольких специальных частей, таких как:
Инструмент манипулятора робота: Манипулятор, также известный как манипулятор, является продолжением робота с использованием цилиндрических или сферических частей. связи и суставы.
Концевой эффектор: Концевой эффектор — это аксессуар на конце манипулятора, который выполняет требуемую работу, например захват объектов. Концевые эффекторы могут быть спроектированы для выполнения различных функций в зависимости от требований.
Приводы: Приводы создают движение в манипуляторе робота и концевых эффекторах. Линейные приводы — это в основном любой тип двигателя, такой как серводвигатель, шаговый двигатель или гидравлический цилиндр.
Линейные приводы — это в основном любой тип двигателя, такой как серводвигатель, шаговый двигатель или гидравлический цилиндр.
Датчики: Вы можете думать о датчиках как о глазах роботов. Датчики выполняют такие задачи, как определение положения объекта.
Контроллеры: Контроллеры синхронизируют и управляют движением различных приводов робота, тем самым являясь мозгом, обеспечивающим бесперебойную работу робота.
Какие существуют типы роботов для захвата и размещения?
Существует множество различных типов роботов для захвата и размещения, например:
Декартовы роботы:
Декартовы роботы перемещают предметы в нескольких плоскостях, используя координаты X, Y и Z (известные как декартовы координаты).
Роботы быстрого выбора:
Быстрые роботы-подборщики подбирают предметы с очень высокой скоростью, поэтому они используются в приложениях с большими объемами. Эти роботы способны перемещать около 300 предметов в час.
Роботы-манипуляторы:
Роботы-манипуляторы — это самый простой и наиболее распространенный тип роботов для захвата и размещения предметов. Как описано ранее, они используются как 5-осевые и 6-осевые манипуляторы. 6-осевой манипулятор работает аналогично декартовым роботам, но имеет более низкую точность позиционирования по сравнению с дельта-роботами.
Дельта-роботы:
Дельта-роботы могут собирать предметы и размещать их в предопределенных схемах сборки или группах. Эти роботы могут быть оснащены датчиками или системами технического зрения для выбора предметов на основе разных цветов или размеров.
Коллаборативные роботы (Кобот):
Коллаборативные роботы названы так потому, что они работают совместно с людьми. Их цель — направить людей к месту сбора или желаемому месту. Эти роботы могут создать оптимальный маршрут, чтобы минимизировать время транспортировки.
Каковы преимущества робота Pick and Place?
Роботы для захвата и размещения предлагают несколько преимуществ по сравнению с использованием людей для той же цели. Некоторые из этих преимуществ:
Некоторые из этих преимуществ:
Скорость:
Скорость работы является одной из основных причин в пользу роботов для захвата и размещения. Эти машины могут поднимать множество предметов за то же время, что и человек, чтобы поднять один предмет.
Производительность:
За счет более высокой скорости работы робот-подборщик имеет более высокую производительность, чем человек. Вот почему современные производственные среды могут выпускать большее количество продуктов, чтобы увеличить производительность.
Непрерывное производство:
Людям нужны перерывы, которые могут привести к перебоям в производственной линии. Перебои случаются и при смене рабочих. Однако роботы не требуют перерывов и могут работать круглые сутки.
Консистенция:
Человеческий труд всегда вносит фактор человеческой ошибки. Однако робот для захвата и размещения будет работать на точных математических принципах, поэтому ошибок не будет, а конечным результатом будет последовательная работа.
Безопасность:
Подъем предметов связан с фактором риска падения предмета на человека и причинения травм. Однако у роботов такого риска нет, что обеспечивает более высокую безопасность на рабочем месте.
Возврат инвестиций:
Роботы Pick and Place позволяют компаниям минимизировать эксплуатационные расходы за счет небольших первоначальных инвестиций. Зарплаты и пособий нет. Это приводит к более высокой отдаче от инвестиций в производственные процессы.
Пропускная способность:
Роботы-подборщики обеспечивают более высокую пропускную способность, поскольку они могут перемещать большое количество объектов за заданное время. Как упоминалось ранее, роботы быстрого подбора способны перемещать товары со скоростью 300 штук в час.
Применение роботов Pick and Place
Как и промышленные роботы для упаковки пищевых продуктов, роботы Pick and Place служат для нескольких различных целей. Эти приложения включают:
Сборочные приложения:
В процессах сборки роботы захвата и размещения могут собирать несколько деталей из разных мест и собирать их в одном месте.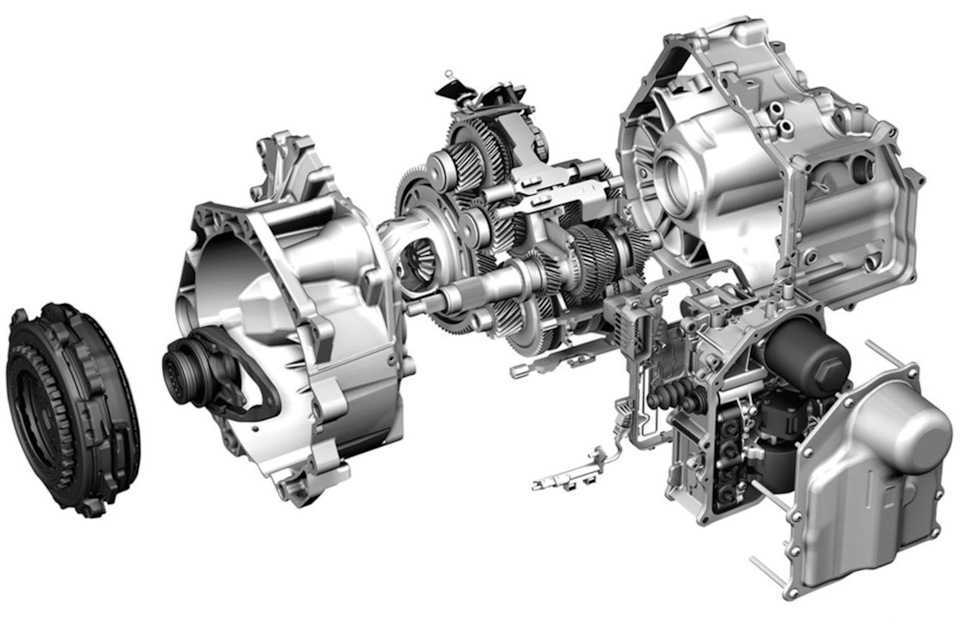 Сложная работа в электронной среде выполняется с использованием этих типов роботов для захвата и размещения.
Сложная работа в электронной среде выполняется с использованием этих типов роботов для захвата и размещения.
Применение упаковки:
В качестве утилиты по упаковке робот собирает и кладет продукты питания и помещает их в упаковочный контейнер. Чтобы загрузить предметы в упаковочный контейнер, их можно даже забрать с конвейерной ленты.
Приложения для сбора из корзины:
В приложениях для подбора из корзин роботы для захвата и размещения могут забирать определенный предмет из корзины. Эти роботы для захвата и размещения оснащены усовершенствованными системами технического зрения, которые позволяют им точно идентифицировать требуемый элемент, что требуется при сборе мусора.
Инспекция и контроль качества:
Инспекция и контроль качества Роботы-подборщики идентифицируют каждый предмет, чтобы выяснить, соответствует ли он протоколу контроля качества производителя. Если товар выходит из строя, робот может снять его с производственной линии.
Сортировка деталей:
Роботы для сортировки деталей могут сортировать различные объекты на основе их формы или информации, содержащейся на самом объекте. Их можно использовать для разделения посылок или для аналогичных целей.
Медицинское применение:
Роботы для захвата и размещения также находят свое применение в медицинском секторе. Они не только помогают в сортировке медицинского инвентаря, но даже могут помочь в сложных операциях.
Отрасли, использующие роботов для захвата и размещения
Роботы для захвата и размещения используются в различных областях в качестве промышленных роботов. Некоторые из отраслей, в которых используются эти роботы:
Упаковка:
Упаковка является одним из наиболее распространенных типов применения роботов для захвата и размещения. От упаковки пищевых продуктов в упаковочный контейнер до роботов для укладки на поддоны, роботы для захвата и размещения находят широкое применение в пищевой промышленности.
Доставка:
Роботы-подборщики нашли свое применение в качестве роботов-доставщиков, а также в нескольких высокотехнологичных средах по всему миру.
Исследования:
Эти роботы также используются в исследовательских целях при работе с высокочувствительными элементами и соединениями в научной среде.
Электроника:
Роботы-подборщики размещают входящие компоненты на печатных платах электроники, такой как телефоны, телевизоры, компьютеры и т. д. Собираются вместе с помощью роботов-подборщиков для быстрого процесса сборки.
Роботы для укладки на поддоны:
Роботы для захвата и размещения используются в той или иной форме почти во всех отраслях промышленности в качестве роботов для укладки на поддоны для размещения предметов друг на друге для создания стопок (называемых поддонами) предметов.
Как правильно выбрать роботов Pick and Place для вашего бизнеса?
Когда дело доходит до робота для захвата и размещения на вашей производственной линии, вы не можете просто пойти и взять первого попавшегося робота. Он требует тщательного исследования, основанного на некоторых важных факторах. Вот эти факторы:
Он требует тщательного исследования, основанного на некоторых важных факторах. Вот эти факторы:
Оси:
Количество осей определяет направления, в которых робот может двигаться. Пятиосевой робот может брать и размещать объект в любом месте в пределах одной плоскости, а шестиосевой робот также может перемещать объекты на разные плоскости. Дополнительные оси могут создавать крутящие и поворотные движения для различной ориентации объекта.
Досягаемость:
Досягаемость — это вся рабочая зона, до которой может дотянуться робот. Рабочая среда робота будет определяться масштабом вашего рабочего места. Для большего рассредоточенного рабочего пространства потребуется робот с большей досягаемостью. Для меньшего рабочего пространства достаточно меньшего радиуса действия.
Скорость:
Для работы с большими объемами вам потребуется высокоскоростной робот для захвата и размещения. Если ваши требования к объему не так высоки, вы можете пойти на компромисс со скоростью движения.
Повторяемость:
Повторяемость — это способность робота выбирать и размещать предметы в точно определенном месте. Высокая повторяемость означает лучшую точность позиционирования и является желательным качеством для более плавной работы.
Лучшие роботы для захвата и размещения
Если вам нужен робот для захвата и размещения, который хорошо справляется со всеми факторами, которые мы определили выше, вы можете проверить ассортимент роботов для захвата и размещения PwrPack.
Эти роботы являются лучшими в отрасли машинами, которые не только служат своей цели, но и превосходят ваши ожидания благодаря безупречной конструкции и высокому качеству сборки.
Эти роботы поставляются с бесплатным оптимизированным программным обеспечением, обеспечивающим сверхвысокую скорость работы. Они идеально подходят для упаковки любых пищевых продуктов, будь то высокоскоростная упаковка печенья, кормов для домашних животных, хлебобулочных изделий или любых других применений.
Сколько стоят роботы Pick and Place?
Роботы Pick and Place — это не просто один робот, а правильно интегрированная система, состоящая из конвейерной ленты, передовых систем технического зрения и многого другого. Вся установка дешевле, чем вы могли бы потратить на рабочую силу, и стоит от 40 000 до 50 000 долларов.
Простые роботы для захвата и размещения, не требующие высокотехнологичных средств, таких как передовые технологии технического зрения, могут стоить всего несколько тысяч долларов.
Если вы сравните эти цифры с вашими затратами на рабочую силу и сопутствующими расходами, вы обнаружите, что человеческий аналог стоит вдвое или втрое дороже, что делает роботов для подбора и размещения значительно более дешевыми и эффективными инвестициями.
Заключение
В наши дни, когда производственный процесс происходит на производственной линии, чтобы удовлетворить периоды пикового спроса, ручной сбор изделий уже невозможен.
Любая область, которая замедляет производство, является еще одним узким местом в производственном процессе.
Вот почему в этой среде роботы для захвата и размещения являются не просто возможностью, а необходимостью. Это особенно актуально для индустрии упаковки пищевых продуктов, где действуют дополнительные факторы, такие как загрязнение людьми или сохранение целостности пищевых продуктов.
Ассортимент высокоскоростных роботов PwrPack позволяет компаниям удовлетворять растущий спрос благодаря совершенным возможностям высокотехнологичной автоматизации.
Часто задаваемые вопросы
[/vc_column_text]
Имеет ли робот для захвата и размещения вращательное движение?
Да, роботы для захвата и размещения могут совершать как вращательные, так и линейные движения. Все зависит от количества осей, которые есть у ваших роботов.
Насколько точны роботы для захвата и размещения?
Точность роботов для захвата и размещения может варьироваться от модели к модели. Роботы PwrPack для захвата и размещения являются одними из самых точных машин с очень высокой повторяемостью.
Какова степень свободы робота-подборщика?
Степень свободы (DOF) — это еще один термин для осей робота для захвата и размещения. Он определяет количество направлений, в которых может двигаться манипулятор, будь то линейные направления или направления вращения.
[/vc_column][/vc_row]
Что такое робот-подборщик? Использование и типы
Роботы для захвата и размещения обычно используются в современных производственных условиях. Автоматизация Pick and Place ускоряет процесс подбора деталей или предметов и размещения их в других местах. Автоматизация этого процесса помогает увеличить производительность. Роботы «выбирай и размещай» выполняют повторяющиеся задачи, освобождая людей для выполнения более сложной работы.
Как работают роботы для захвата и размещения
Как правило, роботы для захвата и размещения устанавливаются на устойчивой стойке и располагаются так, чтобы достигать различных областей для выполнения работы. Они используют передовые системы зрения, чтобы идентифицировать, захватывать и перемещать объекты из одного места в другое. Благодаря множеству доступных вариантов конструкции роботы для захвата и размещения могут быть сконфигурированы с различными вариантами инструментов на конце манипулятора для использования в различных приложениях, таких как сборка, упаковка или сбор контейнеров. Например, роботизированные системы захвата и размещения могут использоваться для подбора товаров для заказа и помещения их в коробку для упаковки, или они могут использоваться для захвата деталей, необходимых для сборки, и перемещения их в следующее место.
Типы роботов для захвата и размещения
Существует несколько типов и компонентов роботов для захвата и размещения, в том числе:
- Робот-манипулятор . Роботизированные руки являются наиболее распространенным типом роботов для захвата и размещения. 5-осевой роботизированный манипулятор может использоваться для стандартных операций захвата и размещения, когда объекты берутся и перемещаются в другие места в одной плоскости.
 6-осевой робот-манипулятор используется для более сложных задач, например, когда объекты необходимо скрутить или переориентировать, прежде чем поместить в другое место.
6-осевой робот-манипулятор используется для более сложных задач, например, когда объекты необходимо скрутить или переориентировать, прежде чем поместить в другое место. - Декартовы — Подобно 6-осевому манипулятору, декартовы роботы работают в нескольких плоскостях. Эти роботы перемещаются по трем ортогональным осям (X, Y и Z) с использованием декартовых координат. Они могут быть сконструированы с любым типом линейного привода и несколькими типами приводных механизмов, такими как ременные, шариковые или ходовые винтовые механизмы. Как правило, они имеют лучшую точность позиционирования по сравнению с 6-осевыми роботами-манипуляторами.
- Delta . Роботы Delta, которые часто используются в приложениях, где роботы собирают предметы группами и помещают их в шаблоны сборки или контейнеры, оснащены передовыми технологиями зрения, которые позволяют им различать различные размеры, формы и цвета. Существует несколько конфигураций роботов Delta, но большинство из них имеют три руки, которые работают по четырем осям. У них есть тяжелые двигатели, прикрепленные к раме, с легкими рычагами, соединенными с соединительными стержнями с шарнирами на обоих концах каждого рычага (обычно шаровыми шарнирами), чтобы обеспечить движение.
- Fast pick – Роботы Fast pick идеально подходят для работы со средними и большими объемами товаров с высокой скоростью товарных позиций. Роботы для быстрого подбора полностью автоматизируют процесс подбора, высвобождая рабочую силу человека, чтобы сосредоточиться на более важных действиях. Они идеально подходят для быстрых «дополнительных» товаров, таких как рекламные товары, добавляемые к заказам или батареям. Эти роботы могут собирать до 300 SKU в час из пула до 8 SKU.
- Collaborative . Коллаборативные роботы дополняют работу людей, побуждая сотрудников выбирать места и помогая сотрудникам выполнять каждую задачу. Оптимизируя маршруты в режиме реального времени и помогая сотрудникам выполнять задачи, коллаборативные роботы помогают сотрудникам работать более эффективно.
Применение роботов для захвата и укладки
Роботы для захвата и укладки часто используются в производстве, но также используются в таких приложениях, как упаковка, сбор и проверка. Вот несколько наиболее распространенных приложений для роботов для захвата и размещения и способы их использования.
- Сборка – Роботы для захвата и размещения, используемые при сборке, захватывают поступающие детали из одного места, например с конвейера, и помещают или прикрепляют деталь к другой части изделия. Затем две соединенные детали транспортируются на следующую сборочную площадку.
- Упаковка – Роботы для захвата и размещения, используемые в процессе упаковки, захватывают предметы из входящего источника или отведенного места и помещают предметы в упаковочный контейнер.
- Комплектация из корзин – Роботы для захвата и размещения, используемые в приложениях для комплектования корзин, захватывают детали или предметы из корзин. Эти роботы для подбора и размещения обычно имеют усовершенствованные системы зрения, позволяющие им различать цвет, форму и размер, чтобы выбирать нужные предметы даже из корзин, содержащих случайно смешанные предметы. Затем эти части или предметы отправляются в другое место для сборки или упаковки.
- Инспекция — Роботы для захвата и размещения, используемые для инспекционных приложений, оснащены передовыми системами технического зрения для захвата объектов, обнаружения аномалий и удаления дефектных деталей или предметов, размещая их в специально отведенном месте.
Преимущества роботов для захвата и размещения
Основными преимуществами роботов для захвата и размещения являются скорость и стабильность. Роботов можно настроить в соответствии с конкретными производственными требованиями, и они легко программируются, поэтому их можно использовать для различных целей. Хотя конструкции различаются, роботы для захвата и размещения часто имеют небольшие размеры и малый вес, что делает их идеальными для использования в приложениях с ограниченным пространством.
Небольшие роботы для комплектования и размещения помогают увеличить производительность, помогая в процессах комплектования и упаковки заказов на складе. Они также обеспечивают хорошую рентабельность инвестиций для производителей. В обоих случаях роботы «подбирай и размещай» освобождают сотрудников и операторов от монотонной повторяющейся работы, что повышает производительность и снижает физическую нагрузку на людей, которая обычно возникает при выполнении таких задач.
Как правильно выбрать робота для захвата и укладки
Роботы для захвата и укладки могут выполнять практически все операции по перемещению материалов экономично и эффективно — будь то сборка деталей, сбор контейнеров или упаковка. На рынке представлено несколько конструкций и конфигураций, поэтому может быть сложно выбрать ту, которая соответствует вашим эксплуатационным потребностям. Чтобы помочь вам принять правильное решение, давайте рассмотрим некоторые факторы и функции, на которые следует обратить внимание при покупке робота для захвата и размещения.
Количество осей
Количество осей определяет степень свободы и перемещения робота захвата и размещения. Как правило, больше осей означает больше движения и гибкости, поэтому лучше иметь больше осей, чем меньше. Для выполнения заказов с помощью роботов, в которых предметы помещаются на конвейер, в корзину или непосредственно в упаковочный контейнер, робот должен иметь от четырех до пяти осей. Шесть или более осей предпочтительны для приложений, в которых робот должен вращаться или двигаться линейно, чтобы выполнять задачи в рамках своей рабочей области.
Досягаемость
Досягаемость — это часть рабочей зоны, описывающая максимальное расстояние (по горизонтали и вертикали), в пределах которого робот для захвата и размещения может перемещать предметы. Поскольку робот должен собирать и размещать предметы с высокой точностью, вам следует оценить его досягаемость, чтобы определить, подходит ли он для ваших операций. Максимальный охват по горизонтали — это расстояние от центра основания робота до самой дальней точки его захвата или пользовательского инструмента на конце манипулятора. Максимальный вертикальный вылет робота измеряется от самой низкой точки, до которой может дотянуться робот (обычно это его основание), до максимальной высоты, на которую может подняться запястье.
Повторяемость
Повторяемость описывает способность робота поднимать и бросать предметы в одном и том же месте для каждой выполняемой им процедуры. Для высокоточных операций (таких как сборка электронной печатной платы) требуются роботы с превосходной повторяемостью и радиусом действия с нулевым допуском. Правильный робот для захвата и размещения должен соответствовать радиусу допуска для вашего целевого приложения — приблизительно (< 0,5 мм) для операций по выполнению заказов.
Скорость
Чтобы повысить производительность и эффективность, вам понадобится робот для захвата и размещения, который сможет постоянно выполнять операции по обработке материалов с требуемой скоростью. В спецификации робота обычно указывается скорость (в градусах в секунду) в диапазоне от 0 до максимальной скорости. Убедитесь, что робот для захвата и размещения может выполнять операции со скоростью (и выше), необходимой для вашей операции. Кроме того, лучше всего приобрести робота для захвата и размещения с максимальной скоростью, который может комфортно справляться с периодами пикового спроса.
Конфигурация и обзор
Роботы для захвата и размещения могут быть:
- Шарнирный робот или робот-скара (закрепленный вращающимися руками на трех вертикальных осях)
- Сферический робот, обеспечивающий одно линейное и два вращательных движения
- Цилиндрический робот, обеспечивающий движение по горизонтальной, вертикальной и вращательной осям
Хотя большинство роботов для захвата и размещения товаров являются гибкими, они ограничены своими размерами, насадками для обработки продуктов и широтой движения. Эти характеристики влияют на то, где они могут быть развернуты и с чем они могут работать. Кроме того, система визуального наведения должна быть достаточно сложной, чтобы идентифицировать несколько товаров из пула SKU.
Полезная нагрузка
Полезная нагрузка — это максимальный вес, который робот может перенести из одной точки в другую. Он включает в себя вес собираемого продукта и вес инструментов на конце руки робота. Робот для захвата и размещения должен быть в состоянии поднять самый тяжелый предмет в вашем инвентаре, полностью вытянуть руку и точно разместить указанный предмет.
Сколько стоят роботы для захвата и размещения?
Логистические операторы могут получить огромную выгоду от развертывания на своих складах подходящих роботов для захвата и размещения товаров. В связи с тем, что пандемия коронавируса нарушает цепочки поставок по всему миру, для предприятий как никогда важно автоматизировать выполнение заказов, чтобы идти в ногу с растущим спросом потребителей и сокращением предложения рабочей силы.
Роботы для захвата и размещения выполняют задачи точно, точно и надежно, не делая перерывов и не реагируя на усталость, монотонность и отвлекающие факторы окружающей среды.
Время установки незначительно, поскольку компаниям не нужно вносить серьезные изменения в инфраструктуру своих складских помещений. Правильные роботы для захвата и размещения могут начать работу почти сразу после их установки и программирования и могут сразу начать повышать уровень производительности.
Несмотря на уровень сложности технологий, используемых при создании роботов для захвата и размещения, они требуют минимального обслуживания. Используя надлежащие методы очистки и рекомендации по техническому обслуживанию, предприятия могут выполнять все необходимое техническое обслуживание собственными силами. Это делает общую стоимость владения роботом для захвата и размещения намного ниже, чем другие технологии автоматизации склада.
Инвестиции в роботов для захвата и размещения позволяют компаниям получить конкурентное преимущество и максимально повысить производительность своих предприятий.