Роботизированная коробка передач
Трансмиссия
Можно сказать, что роботизированная коробка передач занимает промежуточное положение между механической и автоматической трансмиссиями. Идея создания «робота» заключалась в том, чтобы в одной коробке передач сочетались бы комфорт, надежность и экономичность с точки зрения топлива. При этом роботизированная коробка должна была стоить намного дешевле классического «автомата». Как показывает практика, обе цели в итоге были достигнуты.
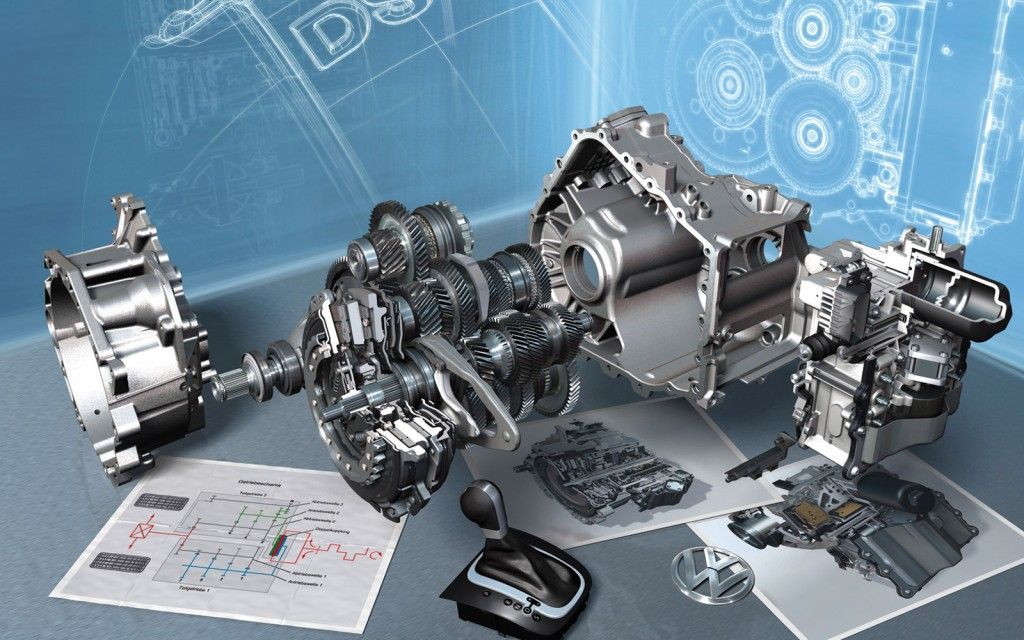
По сути, роботизированная коробка передач является «эволюцией» обычной механической трансмиссии. Устройство и принцип работы «механики» довольно простой. Главными составляющими элементами являются первичный (ведущий) и вторичный (ведомый) валы. На ведущий вал передается крутящий момент от двигателя. Ведомый вал преобразовывает крутящий момент и передает его на передние или задние колеса в зависимости от типа привода автомобиля.
На каждом из валов присутствуют шестерни.
На автомобиле с обычной механической коробкой передач, водитель сначала выжимает сцепление, тем самым отсоединяя первичный вал от мотора. После этого, с помощью рычага коробки на вторичном валу начинают двигаться и перемещаться синхронизаторы, которые не позволяют муфте заблокировать шестерню, пока их скорости вращения не станут одинаковыми. Когда это условие выполнено, синхронизатор жестко блокирует шестерню выбранной передачи на вторичном валу. Чтобы крутящий момент сначала попал на ведомый вал, а от него на главную передачу и ведущие колеса, необходимо включить сцепление.
Но если механической трансмиссией управляет водитель, т.е. он включает и выключает сцепление, выбирает необходимую передачу, то в роботизированной коробке все эти функции выполняет электроника, которая состоит из входных датчиков, электронного блока управления и исполнительные механизмы.![]()
Основная функция входных датчиков заключается в постоянном контроле основных параметров коробки передач. Полученная датчиками информация далее передается в электронный блок управления, который взаимодействует с различными системами автомобиля, такими как ABS, ESP, отслеживает обороты двигателя, скорость движения. Кроме этого, в блок заложена программа управления исполнительными механизмами. На основе полученных данных, электронный блок дает команды исполнительным механизмам, которыми являются сервоприводы – актуаторы.
Как только от электронного блока поступает команда на включение передачи, один сервопривод выжимает сцепление, второй передвигает муфту и включает выбранную передачу. Сразу после включения передачи первый сервопривод плавно отпускает сцепление. Таким образом, водителю не нужно выжимать педаль сцепления, да ее собственно и нет, так как все делает электроника.
Большинство «роботов» имеют два режима работы. В автоматическом режиме все команды, касающиеся работы сцепления и включения необходимой в данный момент передачи, поступают от электронного блока управления.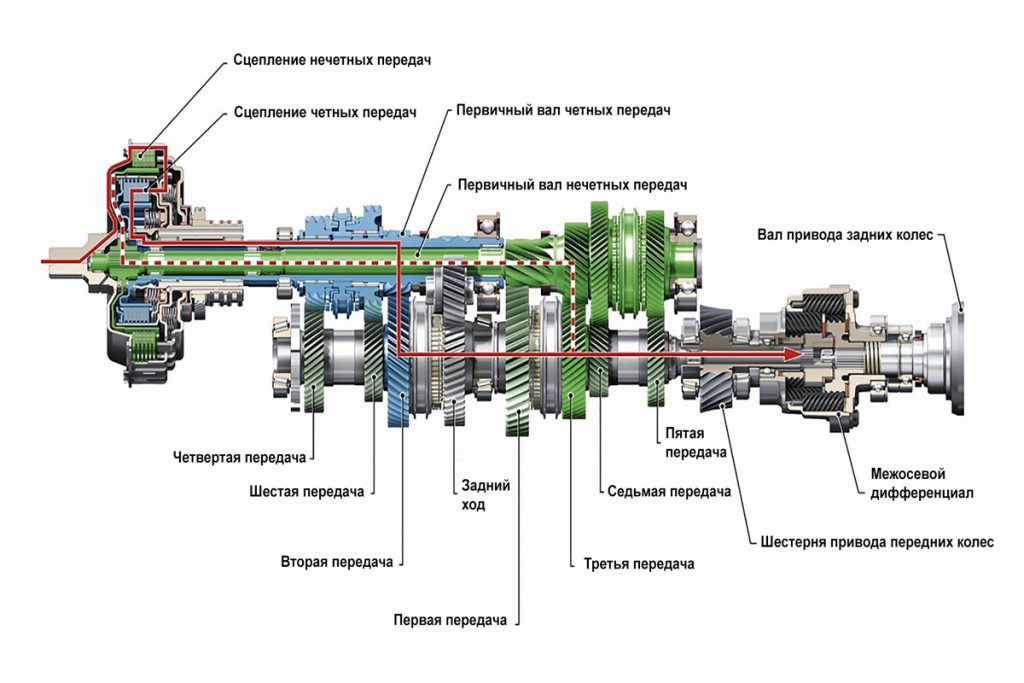 В ручном режиме, водитель самостоятельно переключает передачи.
В ручном режиме, водитель самостоятельно переключает передачи.
При смене передач в автоматическом режиме «робот» надолго прерывает идущую к колесам мощность от двигателя. Причем такие разрывы достаточно продолжительны во времени, чтобы водитель успел их заметить и ощутить.
Чтобы полностью исключить такие провалы или хотя бы существенно сократить время, затрачиваемое на переключение передач, в начале 1980-х годов была разработана роботизированная коробка передач с двойным сцеплением — DCT (dual clutch transmission). Самым известным представителем подобной трансмиссии является коробка DSG, которая применяется на автомобилях Volkswagen, Audi и др.
Статьи — Информация — AUTOSPACE.BY
Название «роботизированная коробка передач» свидетельствует о том, что водитель и условия движения формируют только входную информацию для системы управления, а работой коробки передач руководит электронный блок с определенным алгоритмом управления.
Роботизированная коробка передач сочетает в себе комфорт автоматической коробки передач, надежность и топливную экономичность механической коробки передач. При этом «робот» в большинстве своем значительно дешевле классической АКПП. В настоящее время практически все ведущие автопроизводители оснащают свои автомобили роботизированными коробками передач, устанавливая их на всю линейку моделей от малого до премиум класса.
При этом «робот» в большинстве своем значительно дешевле классической АКПП. В настоящее время практически все ведущие автопроизводители оснащают свои автомобили роботизированными коробками передач, устанавливая их на всю линейку моделей от малого до премиум класса.
Устройство роботизированной коробки передач
Роботизированные коробки передач различаются по конструкции, вместе с тем, можно выделить следующее общее устройство роботизированной коробки передач:
- сцепление;
- механическая коробка передач;
- привод сцепления и передач;
- система управления.
В автоматизированных коробках передач используется сцепление фрикционного типа. Это может быть отдельный диск или пакет фрикционных дисков. Прогрессивным в конструкции коробки передач является т.н. двойное сцепление, которое обеспечивает передачу крутящего момента без разрыва потока мощности.
В основу конструкции роботизированной коробки положена механическая коробка передач.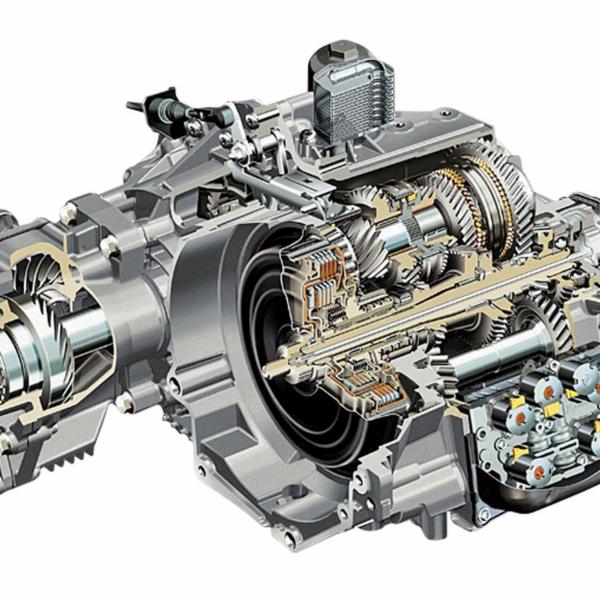 При производстве используются, в основном, готовые технические решения. Например, автоматизированная коробка передач Speedshift от Mercedes-Benz построена на базе АКПП 7G-Tronic путем замены гидротрансформатора на фрикционное многодисковое сцепление. В основе коробки SMG от BMW лежит шестиступенчатая «механика», оборудованная электрогидравлическим приводом сцепления.
При производстве используются, в основном, готовые технические решения. Например, автоматизированная коробка передач Speedshift от Mercedes-Benz построена на базе АКПП 7G-Tronic путем замены гидротрансформатора на фрикционное многодисковое сцепление. В основе коробки SMG от BMW лежит шестиступенчатая «механика», оборудованная электрогидравлическим приводом сцепления.
Коробки-роботы могут иметь электрический или гидравлический привод сцепления и передач. В электрическом приводе исполнительными органами являются сервомеханизмы (электродвигатель и механическая передача). Гидравлический привод осуществляется с помощью гидроцилиндров, которые управляются электромагнитными клапанами. Такой вид привода еще называют электрогидравлическим. В ряде конструкций «роботов» с электрическим приводом (Easytronic от Opel, Durashift EST от Ford) используется гидромеханический блок с электродвигателем для перемещения главного цилиндра привода сцепления.
Электрический привод отличает невысокая скорость работы (время переключения передач 0,3-0,5с) и меньшее энергопотребление.
Эти качества определяют область применения «роботов» с электрическим приводом на бюджетных автомобилях, с гидравлическим приводом – на более дорогих автомобилях. Электрический привод имеют следующие конструкции коробок передач:
- Allshift от Mitsubishi;
- Dualogicот Fiat;
- Durashift EST от Ford;
- Easytronicот Opel;
- MultiModeот Toyota;
- SensoDriveот Citroen;
- 2-Tronic от Peugeot.
Достаточно большое количество роботизированных коробок оснащены гидравлическим приводом:
- ISR (Independent Shifting Rods) от Lamborghini;
- Quickshiftот Renault;
- R-Tronic от Audi;
- Selespeedот Alfa Romeo;
- SMG от BMW.

Управление роботизированной коробкой передач осуществляет электронная система, которая включает входные датчики, электронный блок управления и исполнительные механизмы. Входные датчики отслеживают основные параметры коробки передач: частоту вращения на входе и выходе, положение вилок включения передач, положение селектора, а также давление и температуру масла (для гидравлического привода) и передают их в блок управления.
На основании сигналов датчиков электронный блок управления формирует управляющие воздействия на исполнительные механизмы в соответствии с заложенной программой. В своей работе электронный блок взаимодействует с системой управления двигателем, системой ABS (ESP). В роботизированных коробках с гидравлическим приводом в систему управления дополнительно включен гидравлический блок управления, который обеспечивает непосредственное управление гидроцилиндрами и давлением в системе.
Исполнительными механизмами роботизированной коробки передач в зависимости от вида привода являются электродвигатели (электрический привод), электромагнитные клапаны гидроцилиндров (гидравлический привод).
Коробка передач с двойным сцеплением
Основным недостатком роботизированной коробки передач является сравнительно большое время переключения передач, что приводит к рывкам и провалам в динамике автомобиля и, соответственно, снижает комфорт от управления транспортным средством. Решение указанной проблемы было найдено в применении коробки передач с двумя сцеплениями, обеспечившей переключение передач без разрыва потока мощности.
Двойное сцепление позволяет при включенной передаче выбрать следующую передачу и при необходимости включить ее без перерыва в работе коробки. Поэтому другое название роботизированной коробки передач с двумя сцеплениями – преселективная коробка передач (от preselect – предварительно выбрать).
Другим преимуществом коробки передач с двойным сцеплением является высокая скорость переключение передач, зависящая только от скорости переключения муфт (DSG от Volkswagen – 0,2c, DCT M Drivelogic от BMW – 0,1c). «Робот» с двумя сцеплениями отличает еще и компактность, что актуально для малолитражных автомобилей. Наряду с этим, можно отметить повышенное энергопотребление коробки (особенно с «мокрым» сцеплением). Сравнительно высокая скорость переключения передач в совокупности с непрерывной передачей крутящего момента позволяют добиться отменной разгонной динамики автомобиля и экономии топлива.
«Робот» с двумя сцеплениями отличает еще и компактность, что актуально для малолитражных автомобилей. Наряду с этим, можно отметить повышенное энергопотребление коробки (особенно с «мокрым» сцеплением). Сравнительно высокая скорость переключения передач в совокупности с непрерывной передачей крутящего момента позволяют добиться отменной разгонной динамики автомобиля и экономии топлива.
В настоящее время двойное сцепление применяется во многих роботизированных коробках передач:
- DCT M Drivelogic от BMW;
- DSG от Volkswagen;
- PDK от Porsche;
- Powershift от Ford, Volvo;
- Speedshift DCT от Mercedes-Benz;
- S-Tronic от Audi;
- TCT от Alfa Romeo;
- Twin Clutch SST от Mitsubishi.
Даже великолепная Ferrari 458 Italia оборудована Doppelkupplungsgetriebe (коробка передач с двойным сцеплением). Все перечисленные роботизированные коробки передач используют гидравлический привод сцепления и передач. И лишь одна коробка передач на сегодняшний день имеет электрический привод устройств, это EDC (Efficient Dual Clutch) от Renault (время переключения передач 0,29с).
Все перечисленные роботизированные коробки передач используют гидравлический привод сцепления и передач. И лишь одна коробка передач на сегодняшний день имеет электрический привод устройств, это EDC (Efficient Dual Clutch) от Renault (время переключения передач 0,29с).
Пионерами массового применения коробки передач с двумя сцеплениями являются Volkswagen и Audi, которые устанавливают роботизированную коробку передач DSG и S-Tronic на свои автомобили с 2003 года. Коробка S-Tronic является аналогом коробки DSG, но в отличие от нее устанавливается продольно оси на задне- и полноприводные автомобили.
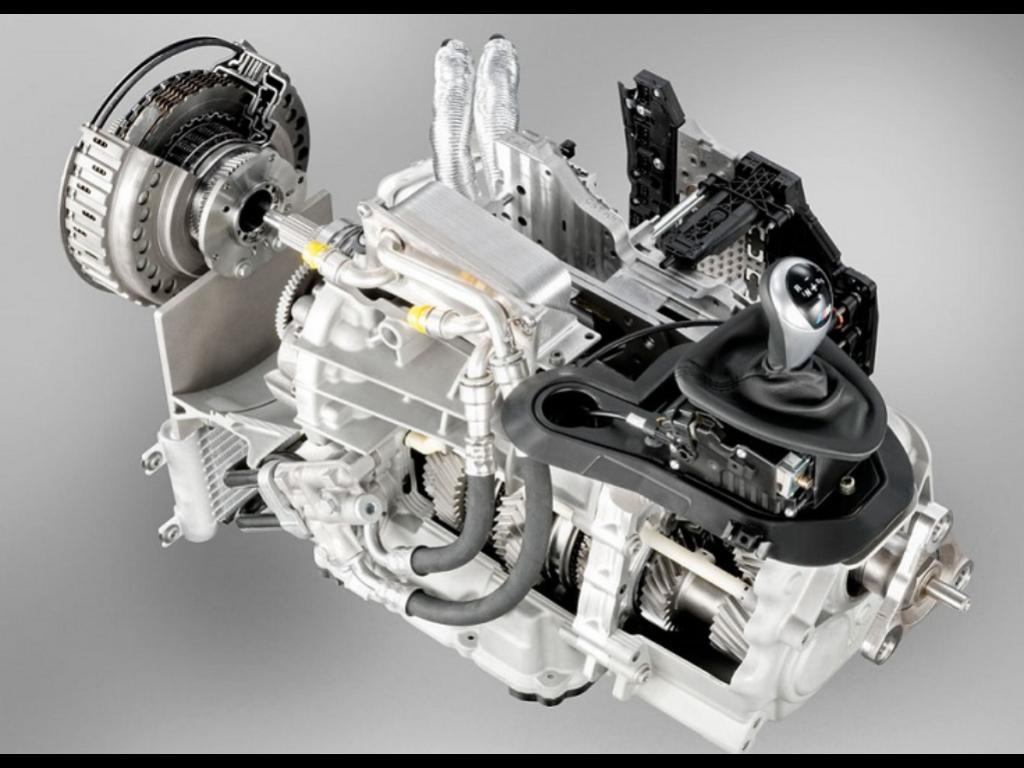
На автоматизированной коробке DCT M Drivelogic в системе управления реализуется функция Drivelogic, которая предполагает одиннадцать программ переключения передач. Шесть программ выполняются в режиме ручного переключения, а пять являются автоматизированными программами переключения передач. Данная функция позволяет адаптировать смену передач под стиль вождения конкретного человека.![]() По сути, данная коробка является адаптивной коробкой передач.
По сути, данная коробка является адаптивной коробкой передач.
Принцип действия роботизированной коробки передач
Работа роботизированной коробки передач может осуществляться в двух режимах: автоматическом и полуавтоматическом. В автоматическом режиме электронный блок управления на основании сигналов входных датчиков реализует определенный алгоритм управления коробкой с помощью исполнительных механизмов.
На всех роботизированных коробках предусмотрен режим ручного (полуавтоматического) переключения передач, аналогичный функции Tiptronic АКПП. Работа в данном режиме позволяет последовательно переключать передачи с низшей на высшую и наоборот с помощью рычага селектора и (или) подрулевых переключателей. Поэтому в ряде источников информации роботизированная трансмиссия называется секвентальной коробкой передач (от sequensum – последовательность).
Шестеренки для робототехники | KHK Производитель зубчатых колес
- ВЕРШИНА >
- Шестерни для робототехники
 org/BreadcrumbList»>
org/BreadcrumbList»>Что такое робот?
Роботы становятся все более неотъемлемой частью нашего общества.
Роботов можно классифицировать по-разному, но в целом их можно разделить на «промышленных роботов» и «сервисных роботов».
Промышленные роботы в основном используются на заводах для автоматизации различных задач, таких как сварка, обработка, сборка, обработка материалов, покраска и т. д., вместо людей (FA — Factory Automation).
Промышленные роботы можно разделить на роботов с вертикальным шарниром, роботов с горизонтальным шарниром (роботы SCARA), роботов с параллельным соединением и декартовых роботов в зависимости от их структуры и формы.
В последние годы кооперативные роботы, которые являются небольшими, взаимодействуют с людьми и могут гибко менять задачи без необходимости в защитных ограждениях, а также AMR (автономный мобильный робот) и AGV (автоматизированное управляемое транспортное средство) для беспилотного транспорта внутри заводов. также вошли в обиход.
также вошли в обиход.
С другой стороны, сервисный робот — это общий термин для роботов, которые оказывают помощь людям и нашли практическое применение в различных областях, таких как медицинское обслуживание, уход за больными, безопасность, обслуживание клиентов и спасение.
Сервисные роботы бывают разных форм, не ограничиваясь гуманоидными роботами, а дроны иногда включаются в сервисные роботы.
Шестерни в роботе
В качестве одного из основных механических элементов (компонентов трансмиссии) шестерни используются в роботах, например, в составе редукторов внутри манипуляторов.
Здесь вращение серводвигателя (электрического привода) замедляется с помощью редуктора скорости для увеличения его выходного крутящего момента, что позволяет получить большую силу с помощью небольшого двигателя.
В случае роботов планетарные зубчатые механизмы, волновые передачи и циклоидальные редукторы используются в качестве типов редукторов и используются в соответствии с применением.
Шестерни также являются незаменимыми и важными механическими элементами, используемыми во многих других местах, помимо редукторов скорости, где они необходимы для увеличения или уменьшения скорости, усиления крутящего момента, изменения направления вращения и т. д.
Зубчатые колеса, используемые в роботах, обрабатываются по мере необходимости, например, шлифование поверхности зубьев, когда требуется высокая точность и бесшумность, и термообработка, когда требуется высокая прочность.
Шестерни, используемые в робототехнике
Цилиндрические шестерни и косозубые шестерни
Цилиндрические зубчатые колеса с косозубыми боковыми поверхностями зубьев называются косозубыми и используются, когда требуется бесшумность и высокая прочность.
Цилиндрические и косозубые шестерни используются в различных местах внутри манипуляторов, например, в механизмах планетарной передачи в качестве механических элементов, используемых для передачи мощности в роботах.
Рейка и шестерня
Реечные шестерни, которые преобразуют вращательное движение в поступательное движение, используются в различных приложениях, таких как роботы с подвижным порталом и открывающие и закрывающие ручные захваты роботов.
Конические шестерни
Конические шестерни используются для изменения направления передачи энергии внутри робота. Тип конического зубчатого колеса также называют «гипоидным зубчатым колесом», оси которого не ортогональны и не параллельны друг другу.
Внутренние шестерни
Внутренние шестерни представляют собой кольцеобразные шестерни с зубьями, прорезанными внутри кольца. В роботах внутренние зубчатые колеса в основном используются в планетарных зубчатых механизмах вместе с цилиндрическими зубчатыми колесами.
Червячные передачи
Червячные передачи, состоящие из червяка и червячного колеса, характеризуются способностью достигать большого передаточного отношения на небольшом пространстве и функцией самоблокировки, которая может предотвратить обратное вращение (в зависимости от условий).
Червячные передачи используются в роботах, например, в шарнирах, при открытии и закрытии ручных захватов роботов и так далее.
Нажмите здесь, чтобы связаться с нами
e-cigre > Публикации > Роботизированное обслуживание воздушных линий электропередачи
SELECT DISTINCT PLACE FROM V_PUB WHERE PLACE NOT NULL AND PLACE » ORDER BY PLACE;Заказать Публикации
Рекламный контент
Ваша учетная запись
LoginPasswordЗабыли парольСоздайте свою учетную записьВебинары
Архитектуры защиты, автоматизации и управления с функциональностью, не зависящей от аппаратного обеспечения
Ref. : WBN043
: WBN043
2023
CIGRE SC. и англ.
CSE 028
Ref.: CSE028
2023
Colloquia Papers
Colloquium — Calgary 2022
Ref.: COLL_CAL_2022
2022
Symposia Papers
Symposium Kyoto — 2022
Ref .: SYMP_KYO_2022
2022
Технические брошюры
Имитационные модели электромагнитных переходных процессов для крупномасштабных исследований влияния системы в энергосистемах с высоким проникновением генерации с инверторным подключением
REF.: 881
2022
Технические брошюры
Примеры рейтинга кабелей для проверки расчета
Ref .: 880
2022
SERTART. Ref.: SESSION_2022_C2
2022
Материалы сессии
Session 2022 — Пакет SC C1
Ref.: SESSION_2022_C1 90
70010 Сессионные материалыСессия 2022 — Пакет SC B5
Ref.