Электроусилитель руля — ЭУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora), коды ошибок, электросхема подключения.
Комплектация с электроусилителем руля — ЭУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora)
Автомобиль Лада Приора выпускается в комплектации с электроусилителем руля (ЭУР). В данном разделе мы более подробно расскажем о его технических характеристиках, особенностях эксплуатации и ремонта. О установке и снятии электромеханичсекого усилителя можно посмотреть в разделе «Снятие и установка электромеханического усилителя рулевого управления ВАЗ 2170 Лада Приора (Lada Priora)»
Технические характеристики электроусилителя руля — ЭУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora)
— номинальное напряжение питания…13,5В;
— максималиный ток потребления…не более 55А;
— ток потребления при отсутствии момента на входном валу…не более 0,5А;
— максимальный компенсирующий момент (при скорости вращения вала до 360С/сек. ,
,
— скорости автомобиля 0км/ч, момент нагрузки на выходном валу 35Нм) …24Нм(12,9кгс при Rрул.колеса=190мм), что соответствует усилию управления на рулевом колесе водителем 6Нм(3,2кгс при Rрул.колеса=190мм)
— момент сопротивления вращению вала при неработающем ЭМУР не более 0,8Нм
— полная масса…не более 9,3кг
— рабочий диапазон температур…-40…+65С;
— рабочий диапазон напряжения питания…10,8..15В;
Коды ошибок — неисправностей электроусилителя руля ЭУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora)
| Коды ошибок неисправности электроусилителя руля ЭУР ВАЗ 2170 2171 2172 Приора | Расшифровка кода ошибки и рекомендации к ремонту | Внешние проявления отказа работы электроусилителя руля ЭУР ВАЗ 2170 2171 2172 Приора, дополнительная информация |
| Код ошибки С1000 | Ошибки не обнаружены | нет — |
| Код ошибки С1011 | Цепь сигнала оборотов двигателя автомобиля, отсутствие сигнала- проверить цепь сигнала оборотов двигателя | после выявления и устранения неисправности, выключить и включить зажигание |
| Код ошибки С1012 | Цепь сигнала датчика скорости автомобиля, отсутствие сигнала- проверить цепь сигнала датчика скорости автомобиля | после выявления и устранения неисправности, выключить и включить зажигание |
| Код ошибки С1013 |
Напряжение бортовой сети автомобиля ниже минимального порога- проверить цепь питания бортовой сети автомобиля |
после выявления и устранения неисправности, выключить и включить зажигание |
| Код ошибки С1014 |
Напряжение на замке зажигания ниже минимального порога- проверить цепь питания с замка зажигания |
после выявления и устранения неисправности, выключить и включить зажигание |
| Код ошибки С1021 |
Напряжение основного вывода датчика момента- выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1022 |
Напряжение контрольного вывода датчика момента- выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1023 |
Неверный сигнал основного и/или контрольного вывода датчика момента — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1024 |
Датчик момента отсутствие сигнала — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1031 |
Датчик положения рулевого вала, неисправность цепи основного сигнала, либо несоответствие допустимому диапазону — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1032 |
Датчик положения рулевого вала, неисправность цепи контрольного сигнала, либо несоответствие допустимому диапазону — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1033 |
Датчик положения рулевого вала, отсутствие питания — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1041 |
Датчик положения ротора двигателя, неисправность цепи фазы А, либо несоответствие допустимому диапазону — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1042 |
Датчик положения ротора двигателя, неисправность цепи фазы В, либо несоответствие допустимому диапазону — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1043 |
Датчик положения ротора двигателя, неисправность цепи фазы С, либо несоответствие допустимому диапазону — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1044 |
Неверная последовательность датчика положения ротора — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1045 |
Датчик положения ротора двигателя, отсутствие питания — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1050 |
Замыкание на массу в силовых цепях — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1051 |
Двигатель, превышение тока через фазную обмотку А — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1052 |
Двигатель, превышение тока через фазную обмотку В — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1053 |
Двигатель, превышение тока через фазную обмотку С — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1054 |
Двигатель, обрыв фазных обмоток — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1055 |
Двигатель, обрыв фазной обмотки А — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1056 |
Двигатель, обрыв фазной обмотки В — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1057 |
Двигатель, обрыв фазной обмотки С — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1058 |
Двигатель, замыкание фазных обмоток — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1059 |
Замыкание обмотки фазы А двигателя — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1060 |
Замыкание обмотки фазы В двигателя — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1061 |
Замыкание обмотки фазы С двигателя — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1071 |
Блок управления, ошибка ОЗУ электронного блока — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1072 |
Блок управления, ошибка ПЗУ электронного блока — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1073 |
Блок управления, ошибка EEPROM электронного блока — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1074 |
Реле электронного блока — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1075 |
Блок управления, превышение температуры радиатора — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР |
, произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1076 |
Напряжение питания элементов ЭБУ ниже минимального порога — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1077 |
Напряжение на силовых конденсаторах ниже минимального порога — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1078 |
Время заряда силовых конденсаторов — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1079 |
Ток одной из фазных обмоток выше максимального порога — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
| Код ошибки С1080 |
Пробой как минимум одного из верхних силовых транзисторов — выключить, включить зажигание завести ДВС и вращая рулевое колесо проверить работоспособность ЭМУР, |
произвести пробный заезд на скорости до 40км/ч |
Назначение выводов колодок электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Колодка Х1 электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Контакт №1 — «+12В» от аккумуляторной батареи
Контакт №2 — «Минус» от аккумуляторной батареи
Колодка Х2 электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Контакт №1 — «+12В» с клеммы «15» выключателя зажигания
Контакт №2 — Вход сигнала от тахометра
Контакт №3 — Вход сигнала от датчика скорости
Контакт №4 — Выход на индикатор состояния ЭМУР
Контакт №5 — Выход «К-линия» на колодку диагностики
Контакт №6 — Выход «L-линия» (не задействован)
Контакт №7 — Общий(масса)
Контакт №8 — Технологический вывод (не задействован)
Колодка Х3 электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Контакт А1 — Фаза А электродвигателя
Контакт А2 — Фаза А электродвигателя
Контакт В1 — Фаза В электродвигателя
Контакт В2 — Фаза В электродвигателя
Контакт С1 — Фаза С электродвигателя
Контакт С2 — Фаза С электродвигателя
Колодка Х4 электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Контакт №1 — Общий провод 1 датчика момента
Контакт №2 — Общий провод 2 датчика момента
Контакт №3 — Питание датчика момента
Контакт №4 — Выход 1 датчика момента
Контакт №5 — Выход 2 датчика момента
Контакт №6 — Вход сигнала частоты 250кГц
Колодка Х5 электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora):
Контакт №1 — Общий провод датчика положения ротора
Контакт №2 — Выход фаза А датчика положения ротора
Контакт №3 — Выход фазы В датчика положения ротора
Контакт №4 — Выход фазы С датчика положения ротора
Контакт №5 — Питание «+5В» датчика положения ротора
Электрическая схема подключения электромеханического усилителя руля ЭМУР на автомобиле Лада Приора ВАЗ 2170 2171 2172 (Lada Priora)
Зависимость сил от электроусилителя при различных скоростях движения автомобиля Лада Приора ВАЗ 2170 2171 2172 (Lada Priora)
При рабочем усилителе соблюдается следующая закономероность, при низких скоростях усилитель работает с максимальными усилиями. При постепенном повышении скорости, электроусилитель уменьшает свое влияние на управление автомобилем, вплоть до отключения, из таблицы ниже можно увидеть данную закономерность для автомобиля Лада Приора ВАЗ 2170 2171 2172 (Lada Priora).
При постепенном повышении скорости, электроусилитель уменьшает свое влияние на управление автомобилем, вплоть до отключения, из таблицы ниже можно увидеть данную закономерность для автомобиля Лада Приора ВАЗ 2170 2171 2172 (Lada Priora).
Снятие и установка ЭУР Приоры
| Электроусилитель руля Приоры (ЭУР) снимается вместе с рулевой колонкой для замены или ремонта. Установку рекомендуется выполнять вместе с помощником. |
Снятие электроусилителя руля ВАЗ 2170
Потребуется: Крестовая отвертка, накидной ключ «на 8», торцевой ключ «на 13».
Снять минусовую клемму с аккумулятора. Снять руль, декоративные накладки рулевой колонки и накладку панели приборов. Далее по порядку:
- Отвернуть 4 самореза с помощью крестовой отвертки, и снять нижнюю накладку панели.
- Отсоединить колодки с проводами от подрулевых переключателей и контактного кольца.
- Ослабить стяжной болт, используя накидной ключ «на 8».
 Разъединить колодки с проводами от замка зажигания.
Разъединить колодки с проводами от замка зажигания. - Сжать фиксаторы и отсоединить жгут с проводами от рулевой колонки.
- Сжать фиксаторы и отсоединить жгут с проводами в нижней части рулевой колонки.
- Освободить фиксаторы, и отсоединить 2 колодки с проводами от электроусилителя рулевого управления.
- Снять со шпильки крепления рулевой колонки декоративную шторку.
- Ослабить затяжку гаек нижнего крепления рулевой колонки, используя торцевой ключ «на 13». Отвернуть их на несколько оборотов.
Замечание:
| Снять рулевую колонку можно в сборе с промежуточным валом, но снимать и устанавливать колонку удобнее, если разъединить промежуточный вал. Соединение фланцев карданных шарниров промежуточного вала помечать не нужно, их установка возможна только в одном положении. |
Далее:
- Отвернуть гайку стяжного болта с помощью ключа «на 13» (он соединяет карданные шарниры промежуточного вала).
- Извлечь болт.
- Отвернуть левую гайку верхнего крепления рулевой колонки, используя торцевой ключ «на 13».
- Отвернуть правую гайку верхнего крепления рулевой колонки, используя торцевой ключ «на 13».
- Снять рулевую колонку Приоры в сборе.
- Отвернуть гайку стяжного болта фланца нижнего карданного шарнира и рулевого вала, используя ключ «на 13».
- Извлечь болт и снять карданный шарнир со шлицевого вала рулевого механизма.
Установка электроусилителя руля на Lada Priora
Установка рулевой колонки с ЭУР производится в обратной последовательности. Перед установкой убеждаемся, что паз на валу, метка на крышке картера рулевого механизма, и метки на защитном чехле расположены должным образом.
Расположение меток для установки рулевого вала:
1 — угловое углубление в крышке картера рулевого механизма; 2 — паз на валу рулевого механизма; 3 — крышка картера рулевого механизма; А — угловой выступ на защитном чехле; Б — вырез в кромке защитного чехла.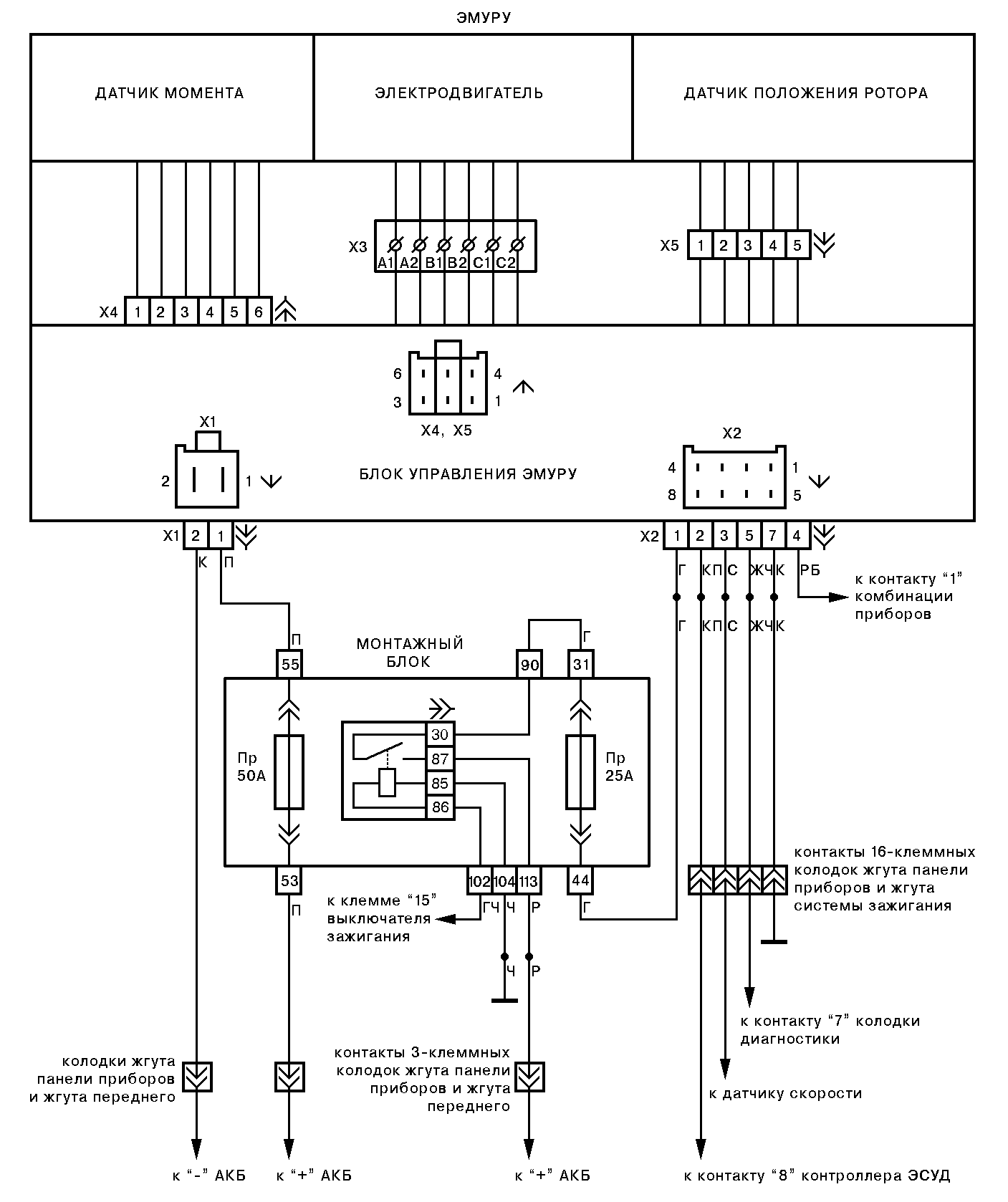
Проследите, чтобы метка А располагалась напротив углубления угловой формы (№1), которая расположена в крышке картера, а вал был повернут так, чтобы его паз (№2) располагался напротив метки Б.
Гайки стяжных болтов на фланцах промежуточного вала затягиваем моментом 23—28 Нм (2,3—2,8 кгсм).
Гайки крепления рулевой колонки затягиваем моментом 15—18,6 Нм (1,5-1,9 кгсм).
Устройство и схема электроусилителя руля Лада Приора
Элементы рулевого управления Lada Priora:
1 — правая рулевая тяга в сборе; 2 — правая опора рулевого механизма; 3 — скоба опоры рулевого механизма; 4 — промежуточный карданный вал; 5 — электроусилитель; 6 — рулевое колесо; 7 — труба рулевой колонки; 8 — левая опора рулевого механизма; 9 — рулевой механизм; 10 — левая рулевая тяга в сборе
Рулевая колонка с электроусилителем рулевого управления Приоры:
1 — входной вал; 2 — труба колонки; 3 — кронштейн колонки; 4 — электроусилитель; 5 — блок управления электроусилителем; 6 — рычаг регулировки наклона рулевой колонки; 7 — стяжная шпилька; 8 — задний кронштейн электроусилителя; 9 — пружина; 10 — выходной вал; 11 — болт-ось; 12 — передний кронштейн электроусилителя; 13 — силовой разъем блока управления; 14 — управляющий разъем блока управления; 15 — гайка.
Ключевые слова:
- руль гранты
- эур калины
Понравилась статья? Поделитесь с друзьями!
Рулевое управление с электроусилителем: прошлое, настоящее и будущее
От Fieros до беспилотного автомобиля электроусилитель руля прошел долгий путь и изменит способ работы вашего магазина.Рулевое управление с электроусилителем быстро становится стандартной функцией на новых автомобилях, но это не новая технология, поскольку она используется уже почти два десятилетия.
Одним из первых отечественных автомобилей, почти дошедших до серийного производства, стал Pontiac Fiero. Модель 1989 года должна была иметь насос с электроприводом, который располагался спереди и приводил в действие обычную рулевую рейку и шестерню с усилителем — технология, которая в конечном итоге была использована Porsche.
В ходе эволюции этой системы гидравлическая часть была заменена магнитами и арматурой. Другая эволюция была в области датчиков. Некоторые современные датчики крутящего момента могут даже определить, убрал ли водитель руки с руля.
Некоторые современные датчики крутящего момента могут даже определить, убрал ли водитель руки с руля.
Электродвигатель эволюционировал до такой степени, что теперь он может взять на себя управление. Более мощные двигатели позволяют автомобилю парковаться самостоятельно и даже подталкивать его обратно в свою полосу движения, если система обнаруживает занос из-за текстового сообщения водителя или смены радиостанции.
Основы
При повороте рулевого колеса датчик рулевого управления определяет его положение и скорость вращения. Эта информация вместе с входными данными от датчика крутящего момента рулевого управления, установленного на рулевом валу, подается в модуль управления усилителем рулевого управления. Другие входные данные, такие как скорость автомобиля и входные данные от систем контроля тяги или контроля устойчивости, учитываются, чтобы определить, какое усилие рулевого управления требуется.
Затем модуль управления дает команду двигателю повернуться на определенную величину, а датчик на двигателе обеспечивает обратную связь с модулем управления, чтобы он мог контролировать положение двигателя. В более старых системах, если датчик или другой компонент системы рулевого управления выходит из строя или начинает выдавать данные за пределами допустимого диапазона, самодиагностика должна обнаружить неисправность, установить код и, скорее всего, отключить усилитель мощности. Предупреждающая лампа загорится, чтобы предупредить водителя, и водитель заметит значительное увеличение усилия на рулевом колесе при повороте автомобиля. Цель системы — предотвратить перегрев и повреждение электродвигателя.
В более старых системах, если датчик или другой компонент системы рулевого управления выходит из строя или начинает выдавать данные за пределами допустимого диапазона, самодиагностика должна обнаружить неисправность, установить код и, скорее всего, отключить усилитель мощности. Предупреждающая лампа загорится, чтобы предупредить водителя, и водитель заметит значительное увеличение усилия на рулевом колесе при повороте автомобиля. Цель системы — предотвратить перегрев и повреждение электродвигателя.
Электроусилитель рулевого управления GM имел только четыре режима работы. В обычном режиме рулевое управление реагирует на действия водителя, измеряемые датчиком угла поворота рулевого колеса и датчиком крутящего момента, и обеспечивает усиление рулевого управления, необходимое для скорости автомобиля.
В режиме возврата система помогает вернуть рулевое управление после завершения поворота. Информация от датчика положения руля не позволяет системе «выйти за пределы» центрального положения.
В режиме демпфера система действует как гидравлический демпфер, предотвращая отдачу и подруливание. Он использует информацию о скорости и положении рулевого колеса для определения степени демпфирования. Иногда рулевое управление переходило в этот режим, когда автомобиль был припаркован с включенным двигателем, и водитель мог заметить небольшие движения руля.
Наиболее важным режимом является режим защиты. Этот режим обнаруживает и оценивает чрезмерное количество или длительные периоды потребления тока, которые могут сжечь двигатель. Это может произойти, если рулевое колесо удерживается в заблокированном положении в течение длительного времени или если информация от датчика угла поворота рулевого колеса ошибочна. В некоторых случаях, если датчик показывает неправильный угол поворота руля, высокая дорожная корона может привести к перегреву системы.
Система имела элементарную диагностику и индикатор неисправности на приборной панели. Он выполняет самопроверку, когда автомобиль начинает подтверждать сигналы и связь с модулем ABS и ECM, и использует входные данные, такие как угол поворота рулевого колеса, приложенный крутящий момент, скорость вращения рулевого колеса и скорость автомобиля, чтобы определить степень помощи.
Эти ранние системы любят перестраховываться. Автопроизводители, предоставившие гарантии на эти системы, хотели исключить вероятность того, что поврежденный или плохо откалиброванный датчик может привести к тому, что двигатель будет работать с большей нагрузкой, чем обычно, и сгорит. При первых признаках неисправности система отключалась и предупреждала водителя лампочкой на приборной панели, надеясь, что автомобиль будет отремонтирован и коллективного иска удастся избежать.
Этот безопасный режим создает диагностическую проблему для технического специалиста, поскольку автомобиль, скорее всего, будет доставлен в вашу мастерскую в таком выключенном состоянии, что затрудняет выявление причины проблемы до тех пор, пока не будут выполнены дополнительные тесты.
Активная система помощи при парковке автоматически управляет рулевым управлением и отдает команды водителю для выполнения плавных маневров при парковке задним ходом.Усовершенствованные системы
Более совершенные системы электроснабжения присутствуют на рынке уже десять лет, и их сложность возрастает с каждым годом.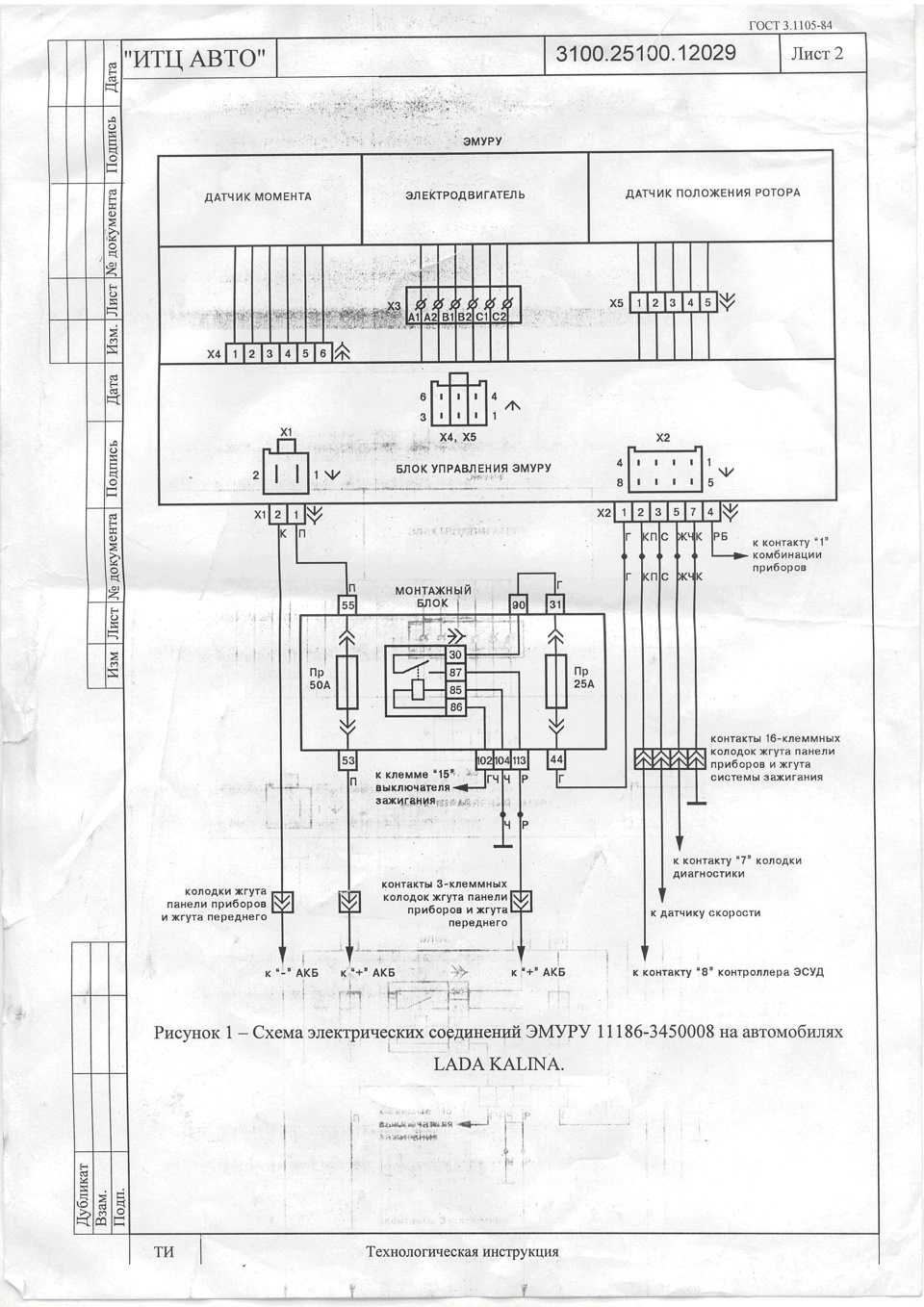 Эти системы являются более мощными и используют больше информации от разных систем, чтобы повысить уровень безопасности, ощущения от рулевого управления и удобства для водителя.
Эти системы являются более мощными и используют больше информации от разных систем, чтобы повысить уровень безопасности, ощущения от рулевого управления и удобства для водителя.
Современный модуль электроусилителя руля связывается как минимум с блоком управления ABS и двигателем по высокоскоростной шине CAN. Модуль рулевого управления с усилителем также может просматривать другую информацию через модуль шлюза.
Самое передовое приложение для электрического рулевого управления использует двунаправленный бесщеточный двигатель, датчики и электронный контроллер для обеспечения помощи при рулевом управлении. Двигатель будет вращать шестерню, которая может быть соединена с валом рулевой колонки или рулевой рейкой. Как и в более старых системах, датчики, расположенные в рулевой колонке, измеряют два основных воздействия водителя — крутящий момент (усилие на рулевом колесе) и скорость и положение рулевого колеса. Контроллер обрабатывает усилие на рулевом колесе и положение маховика с помощью ряда алгоритмов помощи и возврата, чтобы обеспечить правильную полярность и ток для двигателя.
Что действительно отличает более совершенные системы от предыдущих систем, так это разрешение датчиков крутящего момента и положения рулевого колеса. Датчики могут измерять меньшие изменения во входных сигналах водителя по сравнению с датчиками на некоторых системах GM 2005-11 годов.
Существует три различных типа электронных датчиков крутящего момента, которые подразделяются на контактные и бесконтактные. В бесконтактном датчике используется магнитный ротор с чередующимися полюсными наконечниками, прикрепленный к торсиону. Датчики Холла контролируют скручивание торсиона, измеряя изменение магнитного потока, создаваемого его положением на лопасти, расположенные на кольцах статора датчика.
Когда система обнаруживает, что автомобиль съезжает с полосы движения, водитель предупреждается звуковым сигналом и сигнальной лампой на приборной панели. Система автоматически направит автомобиль в полосу движения, если водитель не отреагирует. Когда ротор движется, изменение магнитного потока создает сигнал для аналоговой интегральной схемы, которая обрабатывает сигнал и отправляет информацию вспомогательному алгоритму контроллера.
Благодаря более точным данным и более быстрым модулям электродвигатель на раме делает гораздо больше, чем просто помогает водителю. С помощью всего нескольких дополнительных датчиков и нового программного обеспечения автомобиль будущего становится возможным благодаря электроусилителю руля.
Параллельная парковка невозможна? Установите несколько датчиков приближения в бамперы, которые можно использовать для системы помощи при парковке, которая может параллельно парковать автомобиль. Все, что нужно сделать водителю, это нажать на газ и тормоз.
Добавьте передние и задние камеры и датчики приближения к боковым зеркалам, и вы получите систему выезда за пределы полосы движения, которая может определять, когда транспортное средство съезжает с полосы движения. Мягкие системы могут трясти колесо, как будто они ударяются о воображаемую полосу грохота; более агрессивные системы могут принять меры и направить автомобиль обратно в полосу движения. Эти системы имеют программное обеспечение, которое может определить, вызван ли занос отвлекающим фактором, например, телефонным звонком или законной сменой полосы движения. NHTSA рассматривает возможность обязательного использования этих систем на новых автомобилях 2018 модельного года.
NHTSA рассматривает возможность обязательного использования этих систем на новых автомобилях 2018 модельного года.
Сочетание адаптивного круиз-контроля и электроусилителя руля может почти создать самоуправляемый автомобиль, и некоторые автопроизводители делают этот первый шаг на малых скоростях. Audi, Mercedes Benz и Volvo внедряют функцию, которая позволяет водителю полностью отключиться от движения во время пробки. Водитель может сидеть и отдыхать, пока система берет на себя управление.
Благодаря большему количеству информации и датчиков диагностика стала проще по сравнению со старыми системами. Правильный инструмент сканирования может просматривать множество данных PID и участвовать в двунаправленных тестах. Кроме того, сканер необходим для калибровки датчиков и перепрошивки сменных модулей.
Будущее
Будущее электроусилителя руля безоблачно, поскольку производители автомобилей стремятся улучшить топливную экономичность и добавить функции, которые смогут выделить их автомобили среди конкурентов. Еще одна область, в которой может помочь электроусилитель руля, — это контроль устойчивости.
Еще одна область, в которой может помочь электроусилитель руля, — это контроль устойчивости.
Новые системы рулевого управления в сочетании с системами ABS/ESC вносят небольшие коррективы в рулевое управление, чтобы автомобиль оставался прямолинейным. Эти типы условий могут возникнуть, если автомобиль тормозит на поверхностях с неравномерным сцеплением. Система BMW, например, будет вносить крошечные поправки в угол поворота колес (обычно не замечаемые водителем), чтобы сделать коррекцию с помощью модулятора ABS более эффективной. Эти системные интеграции были бы невозможны, если бы датчики рыскания и угла поворота рулевого колеса не были точными.
Адаптивное или активное рулевое управление изменяет соотношение между действиями водителя на руле и на стойке. В традиционных транспортных средствах это фиксированное передаточное отношение рулевого управления. Благодаря этой новой технологии передаточное отношение рулевого управления постоянно изменяется в зависимости от скорости автомобиля, оптимизируя реакцию рулевого управления в любых условиях.
На более низких скоростях, например, при въезде на парковочное место или маневрировании в тесных помещениях, система делает автомобиль более маневренным и легче поворачивает, так как сильнее направляет руль на опорное колесо. Каждый маневр на низкой скорости требует меньшего количества поворотов рулевого колеса. На высоких скоростях система дополнительно оптимизирует реакцию рулевого управления, позволяя автомобилю более плавно и точно реагировать на действия водителя. Адаптивное рулевое управление может помочь водителю чувствовать себя более комфортно и сделать любую поездку более приятной.
Система BMW помещает планетарную передачу с электронным управлением между рейкой и двигателем. Система может быть заблокирована, если обнаружена проблема. Audi и Lexus размещают коробку передач между рулем и стойкой с механизмом блокировки, включенным в качестве предохранителя.
Новая система с переменным передаточным числом Ford использует прецизионный привод, расположенный внутри рулевого колеса, и не требует изменений в традиционной системе рулевого управления автомобиля.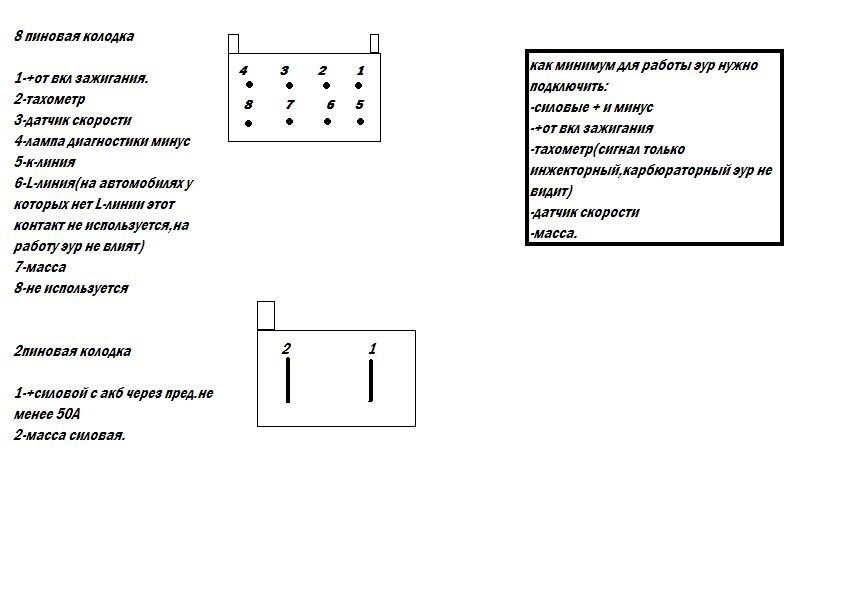 Привод электродвигателя и система редуктора существенно увеличивают или уменьшают влияние водителя на рулевое управление.
Привод электродвигателя и система редуктора существенно увеличивают или уменьшают влияние водителя на рулевое управление.
Обслуживание этих систем потребует обучения и усовершенствованных инструментов сканирования, а диагностика этих систем также потребует предварительного понимания шин CAN. Но самый важный шаг, который вы можете сделать сегодня, — это запустить в своем автосервисе программу калибровки датчиков положения рулевого управления после обслуживания системы рулевого управления или развала-схождения.
Как работает рулевое управление с электроусилителем (EPAS) и почему оно лучше, чем гидравлическое
Рулевое управление с электроусилителем постепенно выходит на передний план автомобильной техники, и некоторые из продаваемых автомобилей с лучшими характеристиками (особенно Porsche) переходят системы рулевого управления в эпоху электроники
Напомнить позже
В более простые времена, до появления какой-либо помощи при вождении, рулевое управление было настолько аналоговым, насколько это возможно, с использованием реечной системы для направления автомобиля в нужном направлении.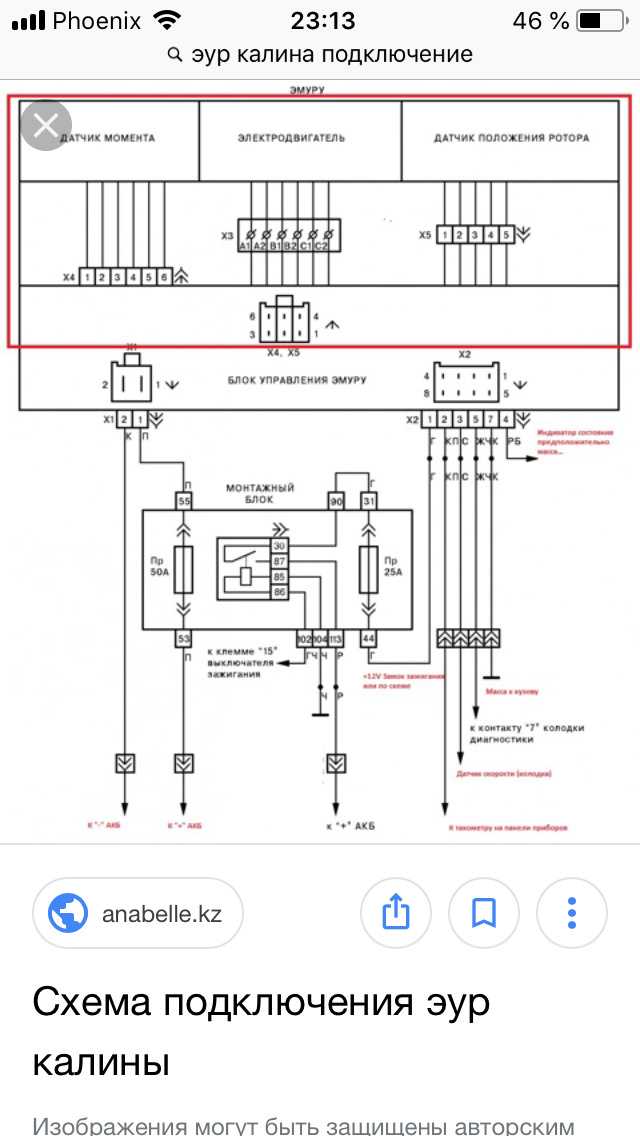 Следующим шагом стало рулевое управление с гидравлическим усилителем, которое доминировало в автомобильном мире с 1951 года, когда его впервые применил Chrysler.
Следующим шагом стало рулевое управление с гидравлическим усилителем, которое доминировало в автомобильном мире с 1951 года, когда его впервые применил Chrysler.
В этой форме системы используется гидравлический насос, который приводится в действие от ремня, прикрепленного к двигателю. Силовой поршень приводится в движение гидравлической жидкостью, которая находится под давлением за счет движения ремня. Затем регулирующий клапан определяет, какое гидравлическое давление необходимо для перемещения колес в любом направлении в зависимости от усилия рулевого управления. Гидравлика увеличивает нагрузку на рулевую рейку, тем самым снижая уровень усилий, необходимых для изменения направления.
Несмотря на то, что гидравлические системы по-прежнему широко используются и почти усовершенствованы, у них есть свои недостатки. Поскольку технически насос приводится в действие двигателем, гидравлическое усиление рассматривается как паразитная потеря. Это означает, что небольшое количество мощности двигателя расходуется на работу насоса, что снижает общую эффективность трансмиссии. В наши дни высокопроизводительные автомобили также должны иметь набор режимов, из которых водитель может выбирать, и большинство из них включают регулировку рулевого управления. Это неудобно для гидравлики, поскольку гидравлическая жидкость, прокачиваемая через систему, будет иметь заданную вязкость (насколько легко жидкость течет), поэтому необходимо использовать какую-то альтернативную форму ограничения.
В наши дни высокопроизводительные автомобили также должны иметь набор режимов, из которых водитель может выбирать, и большинство из них включают регулировку рулевого управления. Это неудобно для гидравлики, поскольку гидравлическая жидкость, прокачиваемая через систему, будет иметь заданную вязкость (насколько легко жидкость течет), поэтому необходимо использовать какую-то альтернативную форму ограничения.
В последнее десятилетие инженеры решили заменить гидравлику старой школы электродвигателями, что неудивительно, учитывая общий сдвиг. к автомобилям с полностью электрическим приводом. Двигатели обычно размещаются либо в основании рулевой колонки, либо непосредственно на рулевой рейке и стали довольно простым решением для продвижения усилителя руля в 21 век. Электронные датчики фиксируют степень блокировки рулевого управления и добавляют пропорциональное дополнительное усилие к усилию рулевого управления. Электрический заряд используется для вращения двигателя, и за счет передачи энергии создается боковая сила, которая способствует движению вдоль рулевой рейки.
Электронные датчики фиксируют степень блокировки рулевого управления и добавляют пропорциональное дополнительное усилие к усилию рулевого управления. Электрический заряд используется для вращения двигателя, и за счет передачи энергии создается боковая сила, которая способствует движению вдоль рулевой рейки.
Главный аргумент против электроники — ощущение руля. Поскольку гидравлика тактильна благодаря наличию вязкой жидкости, она любима пуристами из-за количества обратной связи, которая может передаваться через рулевую рейку и обратно на руль. Итак, когда впервые появились электрические системы рулевого управления, многие дорожные тестеры жаловались на отсутствие обратной связи. Из-за того, что электричество фактически является не тактильным товаром, справедливо предположить, что очень небольшая сила реакции будет возвращаться через электродвигатель.
Простая система EPAS с электродвигателем, установленным на рулевой колонке Однако по мере разработки и усовершенствования систем EPAS (электроусилитель рулевого управления) производителям, таким как Porsche, удалось создать электронные системы, которые почти не уступают по ощущениям гидравлической системе и затем продолжайте превосходить механический метод во многих областях.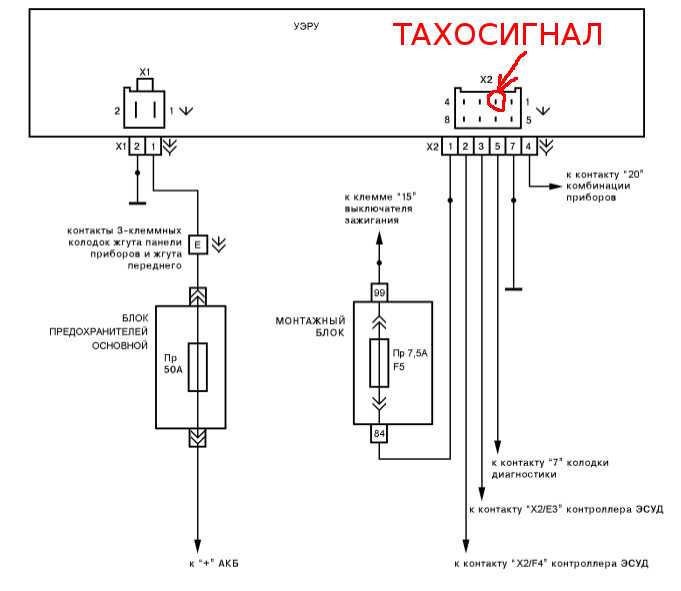 Он сделал это, изменив направление обратной связи внутри электроники; большинство производителей используют систему, которая вводит усилие рулевого управления, рассчитанное на основе датчика крутящего момента колес, в то время как Porsche использует датчики рыскания, угол поворота рулевого колеса и другие значения из системы контроля устойчивости для увеличения и уменьшения помощи соответственно и с гораздо более частой скоростью. Это означает, что в систему EPAS вновь вводится чувство «ощущения», и кроме тех, кто водит автомобили без посторонней помощи, между этими системами EPAS и системой HPAS нельзя найти никаких реальных различий.
Он сделал это, изменив направление обратной связи внутри электроники; большинство производителей используют систему, которая вводит усилие рулевого управления, рассчитанное на основе датчика крутящего момента колес, в то время как Porsche использует датчики рыскания, угол поворота рулевого колеса и другие значения из системы контроля устойчивости для увеличения и уменьшения помощи соответственно и с гораздо более частой скоростью. Это означает, что в систему EPAS вновь вводится чувство «ощущения», и кроме тех, кто водит автомобили без посторонней помощи, между этими системами EPAS и системой HPAS нельзя найти никаких реальных различий.
Другими преимуществами EPAS являются эффективность, удобство и упаковка. Chevrolet продемонстрировал увеличение экономии топлива на 2,5% с момента перехода на электронное рулевое управление из-за отсутствия паразитных отходов двигателя. Парковка с радарным управлением также работает в сочетании с системой EPAS, а с массовым ростом автоматизации электронное рулевое управление определенно никуда не денется.
в спортивных автомобилях. Porsche 911 — отличный пример преимуществ упаковки системы EPAS. До перехода на электронику в конструкцию автомобиля нужно было встроить обширный маршрут гидравлических трубопроводов, чтобы они шли от расположенного сзади двигателя к передним колесам. На автомобилях поколения 991 компания Porsche использовала полную систему EPAS, чтобы двигатели можно было расположить в передней части автомобиля без необходимости использования длинных трубопроводов, что, в свою очередь, способствовало распределению веса 911 — важное соображение для автомобиля с задним расположением двигателя. .
Системы EPAS являются важной частью головоломки для современного автомобилестроения на пути к автоматизации. ввод просто путем изменения количества заряда, создаваемого электронным двигателем, что, в свою очередь, изменяет величину помощи рулевого управления.