Двигатель без коленвала — разбираемся с механизмом + видео » АвтоНоватор
На протяжении многих лет инженеры старались представить, как должен работать супердвигатель без коленвала. Ведь это снизило бы расход топлива и степень негативных последствий постоянной вибрации в моторе. И это случилось, изобретение вызвало многочисленные дискуссии. Попробуем составить впечатление об этом агрегате.
Как зарождался современный ДВС?
Если сравнивать автомобиль с организмом человека, то именно движок будет выполнять роль сердца. Без него эксплуатация транспортного средства попросту невозможна. Само слово мотор в переводе с латыни означает приводить в движение. И если в двух словах, то это устройство отвечает за преобразование энергии от сгорания топлива в механическую, без которой автомобиль не заведется.
Мотор автомобиля
Впервые о подобном агрегате услышали в далеком 1801 году, а благодарить за это изобретение следует французского инженера Филиппа Лебона. А вот создателем образцов, наиболее близких по строению к современным моторам, считают немецкого инженера-самоучку Николауса Отто. О его достижениях мир узнал спустя более 70 лет, в 1877 году.
О его достижениях мир узнал спустя более 70 лет, в 1877 году.
Французский инженер Филипп Лебон
За пять лет до этого Брайтон попытался воплотить в жизнь силовой агрегат, который будет работать на керосине, предыдущие устройства функционировали за счет газа. Попытка оказалась неудачной. Но в 1882 году жизнь получил новый агрегат, работающий на жидком топливе – бензине. И благодарить за его появление на свет человечество обязано немецкого конструктора, инженера и промышленника Готтлиба Даймлера.
Почему мы хотим избавиться от коленчатого вала?
Более двухсот лет прошло с момента появления первого силового агрегата, и с тех пор многое изменилось. Появились различные модификации, теперь они работают на бензине, солярке, газе, но неизменной осталась функция и роль мотора в строении авто. Однако значительный скачок приходится именно на наш век. Сегодня зарождаются новые технологии, и уже есть разработки двигателей без коленвала. Но как может мотор работать без этого узла?
Сегодня зарождаются новые технологии, и уже есть разработки двигателей без коленвала. Но как может мотор работать без этого узла?
Двигатель без коленвала
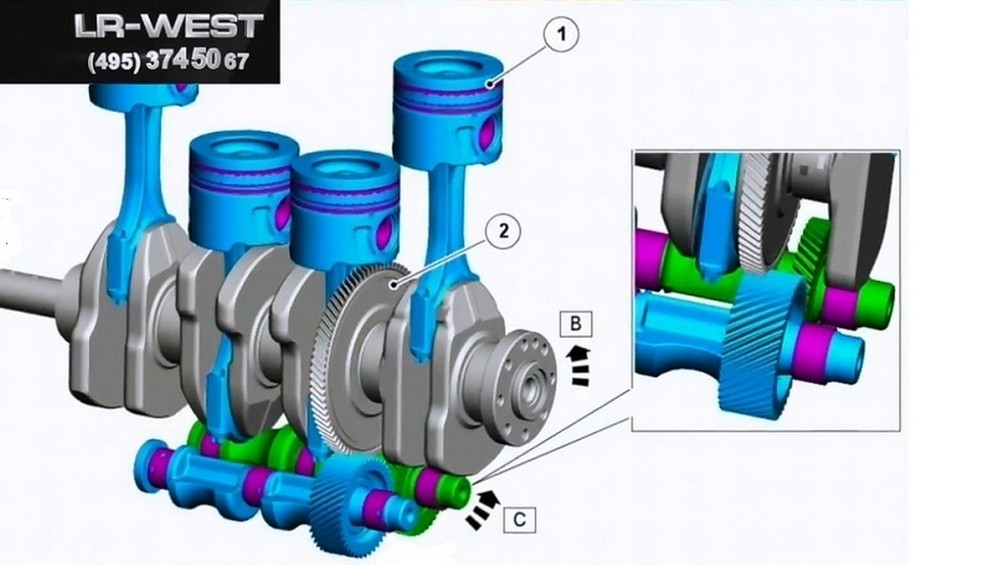
Если разобраться, традиционный кривошипно-шатунный механизм имеет ряд недостатков. Например, во время его работы создается очень сильное боковое усилие на стенки цилиндра. Это приводит к преждевременному износу поршня. Еще подобное усилие значительно увеличивает потери на трение, а значит, страдает КПД. Чтобы исключить этот недостаток, нужен механизм, в котором шатун будет совершать только возвратно-поступательные движения. А вот угловые качения следует полностью устранить. Сейчас можно найти множество разработок подобных агрегатов. Некоторые из них имеют право на существование, другие никуда не годятся.
Кривошипно-шатунный механизм
Основой многих изобретений выступает бесшатунный двигатель Баландина. Его работа заключается в преобразовании возвратно-поступательных движений благодаря специальному эксцентрическому механизму, к которому предъявляются очень высокие требования, что и мешает сделать мотор доступным.
На сегодняшний день у инженеров получилось создать рабочий и прошедший все испытания двигатель, в котором уменьшили количество подшипников коленвала. Это двухпоршневые конструкции. И скорее всего в ближайшие годы этот образец будет пущен в массовое производство. Это, конечно, не воплотило мечту миллионов в реальность, но существенно приблизило нас к ней. А пока что ДВС без коленвала остается навязчивой идеей, и поиски решений продолжаются.
Как видит работу мотора без коленвала Баландин?
Рассмотрим основные элементы и принцип работы таких чудо-агрегатов. Идеально гладкий поршень, на поверхности которого нанесена специальная волнообразная выемка, насаживается на вал. Сюда фиксируется и золотник. Его крепят посредством болтового соединения. Сверху поршня надевается гильза. Вся конструкция помещается в корпус. В его верхней части предусмотрена специальная выемка, куда и устанавливается ролик, а затем она закрывается крышкой на болтах.
Имеется головка, в которую вставляется свеча зажигания. С боковой стороны устанавливается глушитель, который тоже фиксируется посредством четырех длинных болтов. С противоположного торца от головки устанавливается система зажигания и соединяется со свечей посредством тонких трубок. А рядом сбоку крепится карбюратор.
Свечи зажигания для мотора Баландин
Если желаете более наглядно ознакомиться с принципом работы двигателя без коленвала, видео с подробной схемой мы разместили чуть ниже, а сейчас опишем этот процесс в общих чертах. Поршень делает возвратно-поступательные движения. Вал и поршень имеют сквозные отверстия, расположенные в одной плоскости. В них вставляется цилиндр, благодаря которому обеспечивается жесткое соединение. Поэтому при вращении вала вокруг своей оси такие манипуляции испытывает и прикрепленная к нему деталь.
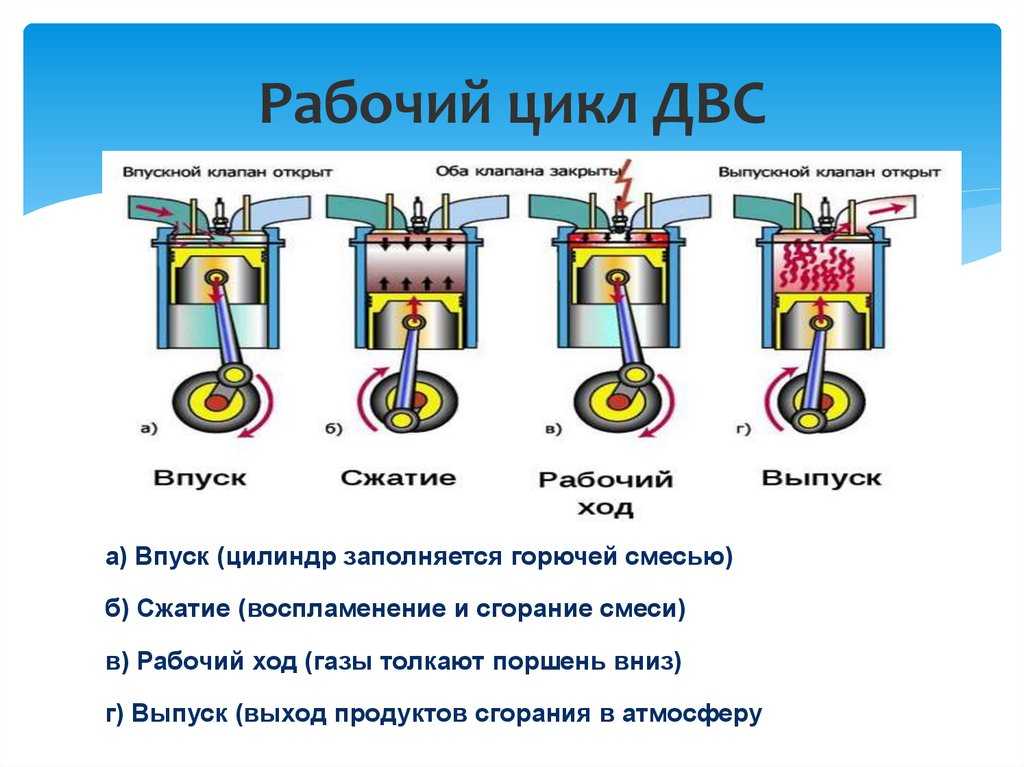
Топливо поступает из бензобака в карбюратор, где распыляется через специальный клапан и перемешивается с воздухом. Когда поршень движется в сторону головки, открывается впускное окно и топливно-воздушная смесь поступает в подпоршневое пространство.
Поршни двигателя без коленвала
Когда поршень находится в крайнем положении, в камере возникает огромное давление и горючее воспламеняется. Этот мини-взрыв толкает поршень в противоположную сторону. Пройдя немного, он открывает канал, через который отработанные газы покидают камеру сгорания. И этот процесс циклично повторяется на протяжении всей работы движка.
Технически подкованным людям при просмотре видеодемонстрации наверняка бросаются в глаза некоторые слабые места такой разработки. И конструкторы продолжают искать пути к повышению надежности и устойчивости такого механизма. Анализ крупных салонов последнего десятилетия показывает, что гиганты автопрома усердно трудятся над совершенствованием мотора. Поэтому есть надежда, что двигатели внутреннего сгорания без коленвала совсем скоро получат реализуемую и надежную конструкцию и автопарк всего мира существенно изменится.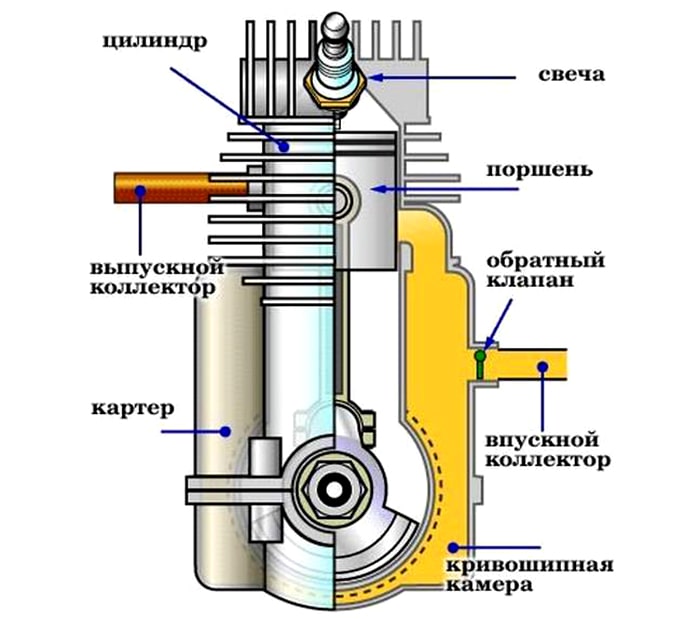
- Автор: Михаил
- Распечатать
Оцените статью:
(4 голоса, среднее: 2.5 из 5)
Поделитесь с друзьями!
Adblockdetector
Двигатель без коленвала: миф или реальность
Для тех, кто активно интересуется различными изобретениями, доработками и инновациями в сфере двигателестроения, следует обратить внимание на двигатель Ибадуллаева, а также на двигатель без коленчатого вала.
Если в первом случае речь идет о значительном увеличении степени сжатия и получении большой мощности без увеличения рабочего объема, то во втором следует понимать снижение механических потерь и рост КПД, расхода горючего, степени вибраций, общего веса ДВС и т. д. Давайте остановимся на моторе без коленвала более подробно.
д. Давайте остановимся на моторе без коленвала более подробно.
Содержание статьи
- Мотор без коленчатого вала: преимущества и сложности реализации
- Бесшатунный двигатель Баландина
- Двигатель Фролова: мотор без шатунов и коленвала
- Что в итоге
Мотор без коленчатого вала: преимущества и сложности реализации
Итак, главной задачей и назначением любого ДВС является преобразование энергии, полученной от сгорания топлива, в механическую работу. Если просто, топливо сгорает в закрытом объеме, газы оказывают давление на поршень, через кривошипно-шатунный механизм возвратно-поступательное движение поршня преобразуется во вращательное.
В результате создается крутящий момент двигателя, который передается через трансмиссию на колеса автомобиля. Примечательно то, что хотя с момента создания первых моторов и их внедрения в широкие массы прошло уже более 100 лет, общая конструкция ДВС не изменилась.
Даже с учетом того, что современные двигатели получили высокоточные развитые системы электронного впрыска и управления, стало возможным изменять фазы газораспределения и т. д., хорошо известный КШМ продолжает лежать в основе силового агрегата на бензине, дизтопливе или газе.
д., хорошо известный КШМ продолжает лежать в основе силового агрегата на бензине, дизтопливе или газе.
При этом постоянно ведутся работы, чтобы мотор мог работать без коленвала. Дело в том, что привычный кривошипно-шатунный механизм не лишен целого ряда определенных минусов. Именно по этой причине инженеры стремятся избавиться от этого узла.
Дело в том, что работа КШМ связана с неизбежным создание трения и значительных боковых усилий, которые приводят к износу стенок цилиндров. В результате зеркало цилиндра повреждается, разрушаются поршневые кольца и т.д. Что касается потерь на трение, общий КПД двигателя заметно снижается.
Также двигатель с коленвалом сложно обслуживать, так как снятие коленвала без снятия двигателя на многих авто крайне сложно реализовать. Вполне очевидно, что если исключить указанные недостатки, двигатель станет более производительным, увеличится моторесурс.
Для решения задачи конструкторы предлагают разные подходы, однако на практике качественно реализовать большинство решений попросту не удается. Наибольшего внимания в данной области сегодня заслуживает двигатель Баландина и двигатель Фролова. Давайте остановимся на механизмах без шатунов и коленвала более подробно.
Наибольшего внимания в данной области сегодня заслуживает двигатель Баландина и двигатель Фролова. Давайте остановимся на механизмах без шатунов и коленвала более подробно.
Бесшатунный двигатель Баландина
Данный мотор известен тем, что в нем отсутствуют шатуны. Преобразование возвратно-поступательного движения поршней в цилиндрах происходит благодаря использованию в конструкции специального эксцентрического механизма.
Общее устройство бесшатунного двигателя предполагает наличие следующих деталей:
- специальный поршневой шток
- коленвал особой конструкции
- подшипник кривошипа и кривошип
- вал для отбора мощности
- поршень
- ползун штока
- цилиндр
В таком ДВС вместо шатунов были использованы поршневые штоки, которые жестко прикреплены к поршням (в обычном агрегате для соединения используется поршневой палец). Указанные штоки, как и привычные шатуны, охватывают шейки коленвала.
Также на штоках с обеих сторон подшипника изготовлены ползуны.
Отсутствие боковых усилий позволяет снизить допуски применительно к размерам поршня. Двигатель становится более производительным, экономичным, возрастает ресурс. Также следует отметить компактность такого ДВС и сниженный вес. Однако главным минусом всей конструкции можно считать крайне высокие требования касательно общей точности изготовления указанного эксцентрика.
Двигатель Фролова: мотор без шатунов и коленвала
Основным принципом В. Фролова, который был положен в основу его разработок, является то, что коленчатый вал является далекой от совершенства деталью. По этой причине талантливый инженер детально изучил конструкцию двигателя Баландина, после чего предложил ряд собственных доработок.
С учетом того, что недостатком бесшатунного мотора Баландина оставались повышенные требования к точности изготовления эксцентрика, на начальном этапе Фролов существенно модернизировал данный узел преобразования. Однако далее был признан факт, что полностью избавиться от недостатков схемы мотора Баландина крайне сложно.
Рекомендуем также прочитать статью о том, что такое двигатель FSI. Из этой статьи вы узнаете, какие особенности имеют двигатели данного типа, а также какие плюсы и минусы имеет указанный мотор.
При этом Фролов не остановился на достигнутом, а также не оставил мысль избавиться от коленвала. Дальнейшие поиски надежных и эффективных механизмов преобразования привели к тому, что изобретатель обратил внимание на механизм ткацкого станка.
В результате был создан сегментно-роторный мотор, в основу которого были положены как заимствованные и доработанные, так и собственные идеи. Полученный двигатель не имеет коленвала, вместо данной детали используется механизм, который по принципу действия и своему устройству похож на шарнир разных угловых скоростей. Такое устройство более известно под названием шарнир Гука.
Такое устройство более известно под названием шарнир Гука.
Вращающиеся детали в таком двигателе Фролова работают благодаря использованию подшипников качения. Что касается смазочной системы, моторное масло подается под крышки клапанов, затем стекает, осуществляя смазку и отвод лишнего тепла. Чтобы масло хорошо охлаждалось, перед двигателем также отдельно установлен масляный радиатор.
Что в итоге
Как видно, даже с учетом сложности реализации, инженеры и конструкторы все равно продолжают искать способы для повышения общей надежности двигателей, увеличения их КПД, снижения расхода топлива.
Рекомендуем также прочитать статью о том, что такое двигатель GDI. Из этой статьи вы узнаете об особенностях конструкции, а также о преимуществах и недостатках моторов данного типа.
Также следует добавить, что западные производители также вплотную занимаются данным вопросом.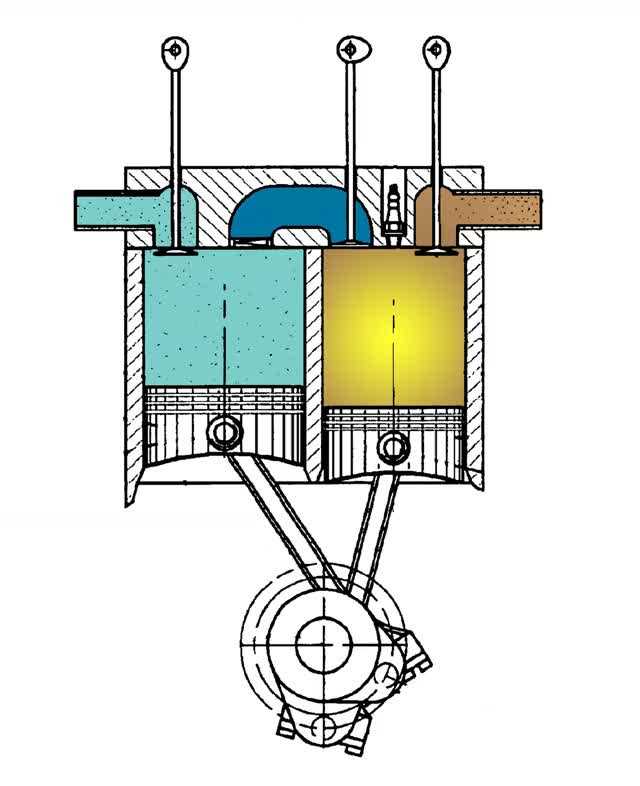 Например, известная японская корпопрация Toyota также предложила свой вариант двигателя без коленвала. Хотя такой агрегат больше похож на электрический генератор, все равно его можно считать одной из версий ДВС.
Например, известная японская корпопрация Toyota также предложила свой вариант двигателя без коленвала. Хотя такой агрегат больше похож на электрический генератор, все равно его можно считать одной из версий ДВС.
С учетом вышесказанного становится понятно, что еще рано говорить об окончании эволюции двигателей внутреннего сгорания. Другими словами, не следует исключать возможность появления бесшатунных моторов, а также агрегатов без коленчатого вала на серийных транспортных средствах.
Двигатель без коленвала своими руками
На протяжении многих лет инженеры старались представить, как должен работать супердвигатель без коленвала. Ведь это снизило бы расход топлива и степень негативных последствий постоянной вибрации в моторе. И это случилось, изобретение вызвало многочисленные дискуссии. Попробуем составить впечатление об этом агрегате.
Как зарождался современный ДВС?
Если сравнивать автомобиль с организмом человека, то именно движок будет выполнять роль сердца.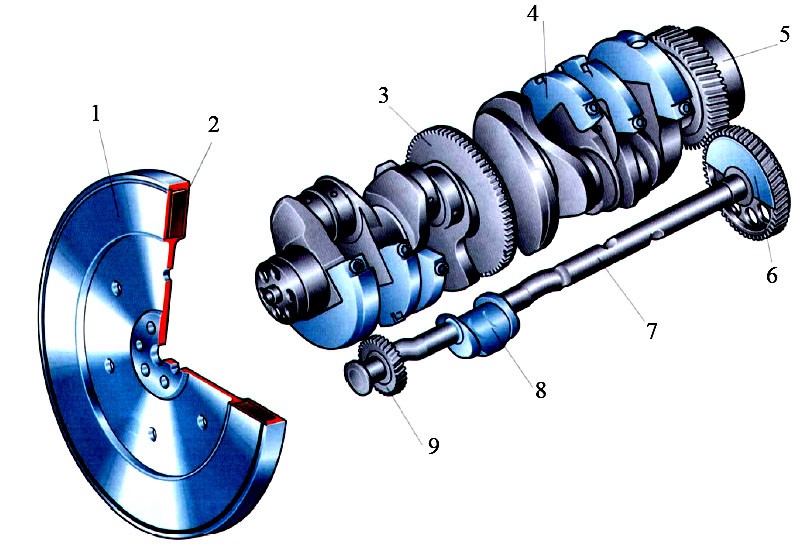 Без него эксплуатация транспортного средства попросту невозможна. Само слово мотор в переводе с латыни означает приводить в движение. И если в двух словах, то это устройство отвечает за преобразование энергии от сгорания топлива в механическую, без которой автомобиль не заведется.
Без него эксплуатация транспортного средства попросту невозможна. Само слово мотор в переводе с латыни означает приводить в движение. И если в двух словах, то это устройство отвечает за преобразование энергии от сгорания топлива в механическую, без которой автомобиль не заведется.
Мотор автомобиля
Впервые о подобном агрегате услышали в далеком 1801 году, а благодарить за это изобретение следует французского инженера Филиппа Лебона. А вот создателем образцов, наиболее близких по строению к современным моторам, считают немецкого инженера-самоучку Николауса Отто. О его достижениях мир узнал спустя более 70 лет, в 1877 году.
Французский инженер Филипп Лебон
За пять лет до этого Брайтон попытался воплотить в жизнь силовой агрегат, который будет работать на керосине, предыдущие устройства функционировали за счет газа. Попытка оказалась неудачной.
Но в 1882 году жизнь получил новый агрегат, работающий на жидком топливе – бензине.
И благодарить за его появление на свет человечество обязано немецкого конструктора, инженера и промышленника Готтлиба Даймлера.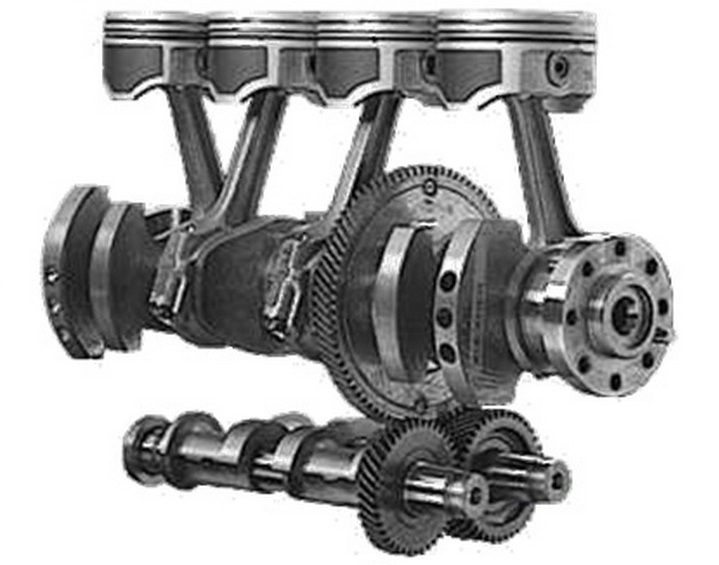
Почему мы хотим избавиться от коленчатого вала?
Более двухсот лет прошло с момента появления первого силового агрегата, и с тех пор многое изменилось.
Появились различные модификации, теперь они работают на бензине, солярке, газе, но неизменной осталась функция и роль мотора в строении авто. Однако значительный скачок приходится именно на наш век.
Сегодня зарождаются новые технологии, и уже есть разработки двигателей без коленвала. Но как может мотор работать без этого узла?
Двигатель без коленвала
Если разобраться, традиционный кривошипно-шатунный механизм имеет ряд недостатков. Например, во время его работы создается очень сильное боковое усилие на стенки цилиндра. Это приводит к преждевременному износу поршня. Еще подобное усилие значительно увеличивает потери на трение, а значит, страдает КПД.
Чтобы исключить этот недостаток, нужен механизм, в котором шатун будет совершать только возвратно-поступательные движения. А вот угловые качения следует полностью устранить. Сейчас можно найти множество разработок подобных агрегатов. Некоторые из них имеют право на существование, другие никуда не годятся.
Сейчас можно найти множество разработок подобных агрегатов. Некоторые из них имеют право на существование, другие никуда не годятся.
Кривошипно-шатунный механизм
Основой многих изобретений выступает бесшатунный двигатель Баландина. Его работа заключается в преобразовании возвратно-поступательных движений благодаря специальному эксцентрическому механизму, к которому предъявляются очень высокие требования, что и мешает сделать мотор доступным.
На сегодняшний день у инженеров получилось создать рабочий и прошедший все испытания двигатель, в котором уменьшили количество подшипников коленвала. Это двухпоршневые конструкции. И скорее всего в ближайшие годы этот образец будет пущен в массовое производство. Это, конечно, не воплотило мечту миллионов в реальность, но существенно приблизило нас к ней.
А пока что ДВС без коленвала остается навязчивой идеей, и поиски решений продолжаются.
Как видит работу мотора без коленвала Баландин?
Рассмотрим основные элементы и принцип работы таких чудо-агрегатов.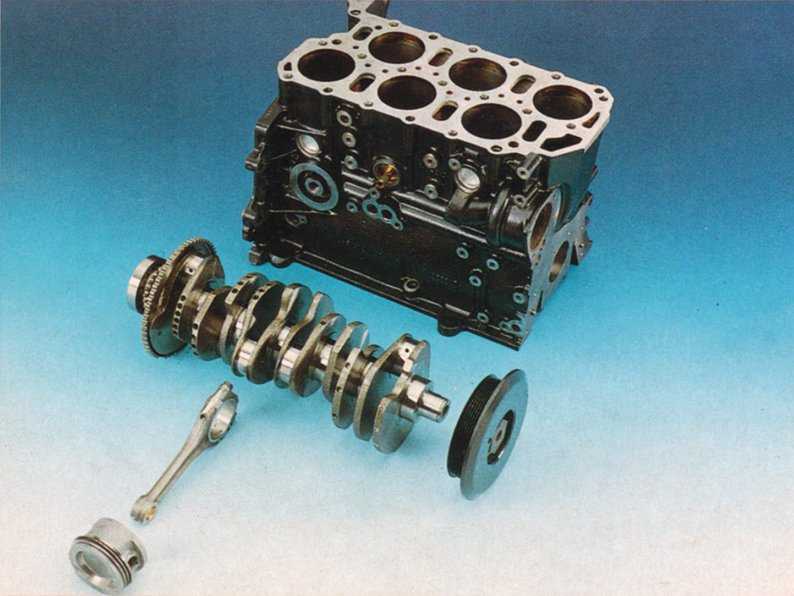 Идеально гладкий поршень, на поверхности которого нанесена специальная волнообразная выемка, насаживается на вал. Сюда фиксируется и золотник.
Идеально гладкий поршень, на поверхности которого нанесена специальная волнообразная выемка, насаживается на вал. Сюда фиксируется и золотник.
Его крепят посредством болтового соединения. Сверху поршня надевается гильза. Вся конструкция помещается в корпус.
В его верхней части предусмотрена специальная выемка, куда и устанавливается ролик, а затем она закрывается крышкой на болтах.
Имеется головка, в которую вставляется свеча зажигания. С боковой стороны устанавливается глушитель, который тоже фиксируется посредством четырех длинных болтов. С противоположного торца от головки устанавливается система зажигания и соединяется со свечей посредством тонких трубок. А рядом сбоку крепится карбюратор.
Свечи зажигания для мотора Баландин
Если желаете более наглядно ознакомиться с принципом работы двигателя без коленвала, видео с подробной схемой мы разместили чуть ниже, а сейчас опишем этот процесс в общих чертах. Поршень делает возвратно-поступательные движения.
Вал и поршень имеют сквозные отверстия, расположенные в одной плоскости. В них вставляется цилиндр, благодаря которому обеспечивается жесткое соединение.
Поэтому при вращении вала вокруг своей оси такие манипуляции испытывает и прикрепленная к нему деталь.
Топливо поступает из бензобака в карбюратор, где распыляется через специальный клапан и перемешивается с воздухом. Когда поршень движется в сторону головки, открывается впускное окно и топливно-воздушная смесь поступает в подпоршневое пространство.
Затем окно закрывается, а горючее сжимается вследствие изменения движения детали в противоположную сторону. В это время открывается продувочное окно, и смесь поступает в камеру сгорания, где опять происходит ее сжатие, обусловленное движением поршня.
Поршни двигателя без коленвала
Когда поршень находится в крайнем положении, в камере возникает огромное давление и горючее воспламеняется. Этот мини-взрыв толкает поршень в противоположную сторону.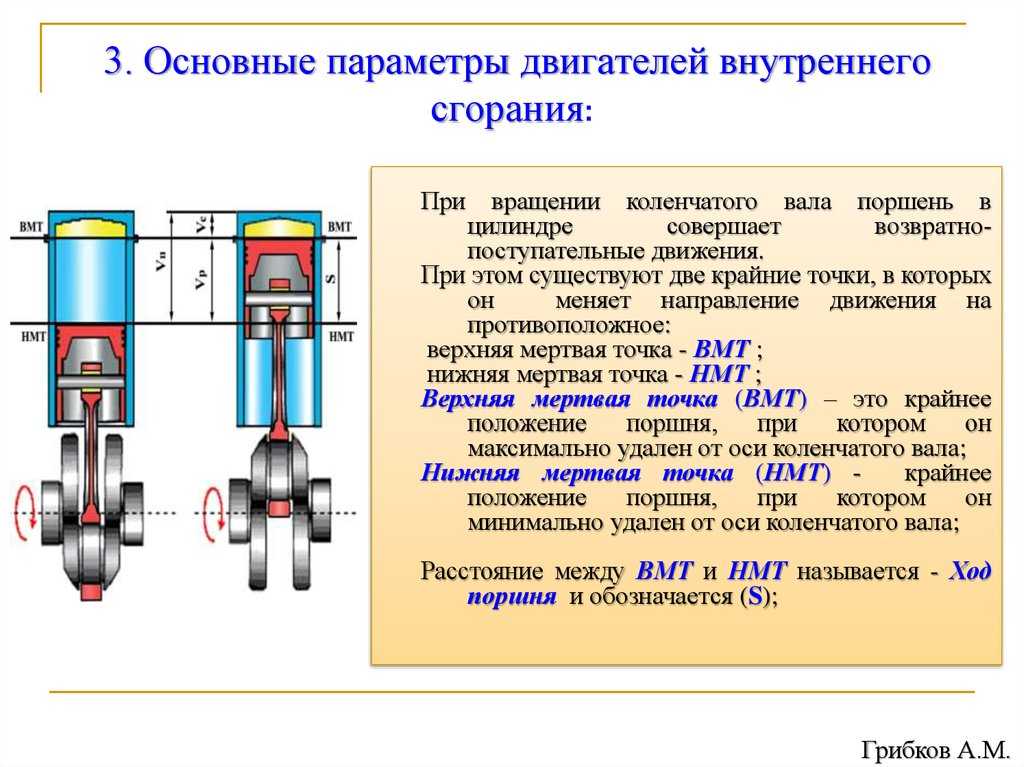
Технически подкованным людям при просмотре видеодемонстрации наверняка бросаются в глаза некоторые слабые места такой разработки. И конструкторы продолжают искать пути к повышению надежности и устойчивости такого механизма.
Анализ крупных салонов последнего десятилетия показывает, что гиганты автопрома усердно трудятся над совершенствованием мотора.
Поэтому есть надежда, что двигатели внутреннего сгорания без коленвала совсем скоро получат реализуемую и надежную конструкцию и автопарк всего мира существенно изменится.
- Михаил
- Распечатать
Двигатели без коленвала — новая эра в автомобилестроении
Первые автомобильные двигатели были изобретены более века назад. С того времени в их конструкции мало что изменилось.
Двигатель без коленвала
Конечно, двигатели усовершенствуются, модернизируются, становятся экологичными, лёгкими и компактными, но основы конструкции остаются прежними. Сейчас всё чаще говорят про ДВС без коленвала.
Сейчас всё чаще говорят про ДВС без коленвала.
Зачем нужно убирать коленчатый вал? Как работают такие агрегаты? Такие ли они совершенные или всё же некоторые отрицательные характеристики для них свойственны?
Почему мы хотим избавиться от коленчатого вала
Отчего же таким ненавистным устройством является коленчатый вал, который ещё называется кривошипно-шатунным механизмом? Почему все так упорно желают избавиться от него? Главная причина скрывается в присутствии чрезмерного бокового усилия, которое приходится на стенки цилиндра. Эта особенность обуславливает наличие ряда негативных факторов:
- сокращение долговечности поршневой системы и её ускоренный износ;
- увеличение потерей, которые приходятся на трение;
- снижение КПД.
Чтобы убрать все эти отрицательные моменты, необходимо создать такой агрегат, конструкция которого будет предполагать возвратно-поступательные движения без углового качения.
Свободнопоршневой двигатель машины
Такие механизмы уже существуют в большом количестве. Далеко не все из них могут применяться на практике, лишь некоторые экземпляры достойны внимания. Мы выбрали две модели двигателей без коленвала, презентация которых всколыхнула общественность.
Далеко не все из них могут применяться на практике, лишь некоторые экземпляры достойны внимания. Мы выбрали две модели двигателей без коленвала, презентация которых всколыхнула общественность.
Бесшатунный двигатель Баландина
Первый достойный двигатель без коленвала, который сейчас ложится в основу многих разработок и изобретений, носит имя Баландина.
Суть функционирования такого механизма заключается в преобразовании движений возвратно-поступательного типа. Это стало возможным за счёт наличия специального эксцентрического механизма.
К этой детали предъявляются высокие требования, которые делают силовой агрегат дорогим и недоступным для широкого использования.
Конструкция является особенной, для неё характерны уникальные характеристики, о которых мы как раз сейчас будем говорить:
- шатуны заменены на поршневые штоки, они жёстко скрепляются с поршнями;
- поршневые штоки аналогично шатунам охватывают шейки с коленвала;
- по обе стороны от подшипника штока располагаются ползуны, которые за счёт направляющих свободно скользят;
- поршень является обоймой для уплотнительных колец, которые располагаются между цилиндром и поршнем.

В такой конструкции отсутствуют боковые усилия, за счёт чего допустимо сокращение размеров поршня. Сам мотор демонстрирует высокую производительность, является экономичным и характеризуется ёмким ресурсом. Также конструкция становится компактной и более лёгкой. О недостатке мы уже говорили, он заключается в высоких требованиях относительно точности эксцентрика.
Многие специалисты работают над усовершенствованием этого механизма, используя его в качестве основы для своих изобретений.
Двигатель Фролова — мотор без шатунов и коленвала
Этот гениальный человек считал коленвал совершенно неидеальной деталью, которая нуждается в серьёзной доработке или, вовсе, является лишней в ДВС. Инженер долго и тщательно изучал конструкцию механизма Баландина. Эти наблюдения натолкнули его на создание другого механизма.
Бесшатунный мотор Баландина
Фролов изначально модернизировал эксцентрик, чтобы в дальнейшем его требования к точности не стали проблемой. Полностью убрать недостатки, характерные для двигателя Баландина, является крайне сложной задачей, даже для Фролова. Украинский инженер продолжил свои разработки, в надежде полностью убрать из механизма коленвал. Его внимание привлёк механизм, который используется в ткацких станках.
Украинский инженер продолжил свои разработки, в надежде полностью убрать из механизма коленвал. Его внимание привлёк механизм, который используется в ткацких станках.
Результатом длительной и плодотворной работы стал сегментно-роторный механизм. В его структуре отсутствует коленвал, он заменён элементом, напоминающим шарнир с разными угловыми скоростями. Такой механизм известен, как шарнир Гука. Вращение деталей в двигателе внутреннего сгорания Фролова обеспечивается подшипниками качения.
Модель мотора без коленвала
Эра эволюции ДВС только начинается, и пока неизвестно, что нас ожидает в конце. Существующие наработки показывают хороший старт и дают повод надеяться на великие открытия. Возможно, уже не за горами момент, когда будет изобретён вечный двигатель.
Есть ли будущее у двигателя внутреннего сгорания без коленчатого вала со свободным поршнем?
История совершенствования двигателя внутреннего сгорания (ДВС) — длительный путь постоянного усложнения систем, обслуживающих термодинамические процессы в камере сгорания машины объѐмного вытеснения с кривошипно-шатунным механизмом.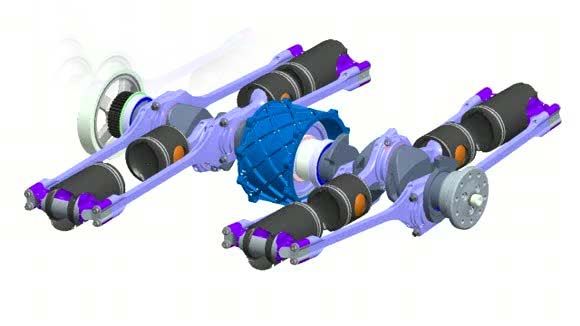
Нетрадиционным направлением развития конструкций двигателей внутреннего сгорания, является разработка свободнопоршневых энергетических установок.
Их особенности работы связаны с отсутствием кривошипно-шатунного механизма, преобразующего в традиционном двигателе возвратно-поступательное движение поршня в однонаправленное вращение выходного вала.
Отсутствие ограничителя движения поршня (кривошипно-шатунного механизма) приводит к иному закону движения, что позволяет получить качественно новые его характеристики.
Устроен двигатель просто. По сути, это цилиндр с глухими концами, внутри которого скользит поршень. На каждом конце цилиндра – инжектор для впрыска топлива, впускное и выпускное окно или клапана.
В зависимости от типа топлива к ним могут быть добавлены свечи зажигания. И все: меньше десятка простейших деталей и лишь одна — движущаяся.
Поршень в таком двигателе движется линейно, возвратно-поступательно, между двумя камерами сгорания.
В традиционной силовой установке среди нагромождения этих систем практически не виден сам двигатель, структурная схема основного механизма которого осталась неизменной со времѐн Ленуара, Отто, Бенца и Даймлера.
Существует своеобразное «табу» на основной механизм ДВС при котором значительно изменяется конструкция различных систем: газообмена, впрыска топлива и т.д., но существенным образом не изменяется схема кривошипно-шатунного механизма.
И это при том, что кривошипно-шатунный механизм имеет много принципиальных недостатков: он обеспечивает возможность реализации далеко не идеального термодинамического процесса при постоянно изменяющемся рабочем объѐме и не позволяет преобразовывать максимальную нагрузку на поршень в крутящий момент на валу при нулевом эффективном плече; быстротекущие процессы расширения-сжатия определяют политропный процесс преобразования тепловой энергии, существенно отличающийся от идеального; прижатие поршня к цилиндру существенно ограничивает работоспособность и ресурс двигателя, а механизм одноцилиндрового двигателя вовсе кинематически неработоспособен и необходимо применение лишней массивной детали — маховика.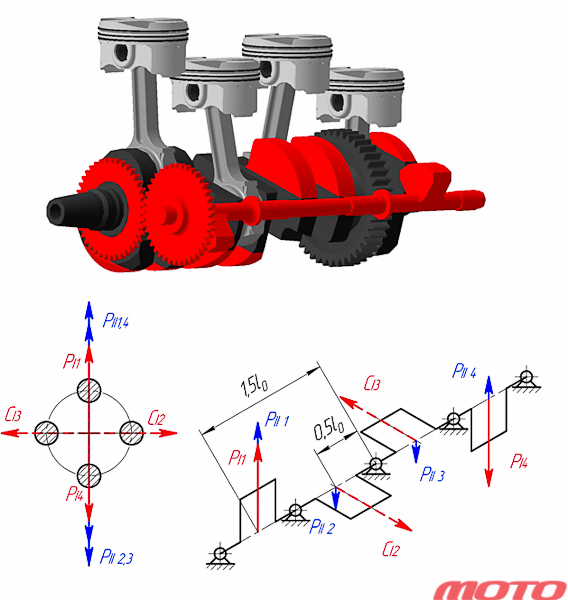
Кроме того повышение частоты вращения и степени сжатия, как способ увеличения литровой мощности двигателя, приводит к снижению его термодинамического совершенства. Как следствие имеется объективная причина поиска принципиально новых механизмов двигателей силовых установок.
Оригинальная концепция двигателя внутреннего сгорания — простота.
Одна из самых радикальных концепций ДВС в истории — двигатель со свободным поршнем. Первые упоминания о нем в специальной литературе относятся к 20-м годам прошедшего столетия.
С 1930-х по 1960-е годы такие двигатели использовались в качестве воздушных компрессоров и газогенераторов, поскольку они обладали заметными преимуществами перед обычными двигателями внутреннего сгорания и газовыми турбинами.
Свободнопоршневой двигатель аналогичен обычному поршневому двигателю внутреннего сгорания, но с заменой системы коленчатого вала линейным поршневым узлом, который может работать свободно и только в линейном перемещении.
КПД такого двигателя теоретически больше 70%. Он легок и прост в производстве, а, значит, дешев. Но, не смотря на то, что этот двигатель известен около ста лет, широкого распространения он не получил.
Причин тому несколько, и самая главная из них состоит в том, что до последнего времени инженеры не знали, каким способом можно было бы снять мощность с поршня, движущегося взад-вперед внутри цилиндра с частотой 20 000 раз в минуту.
Основная особенность свободнопоршневого двигателя в том, что движение поршня определяется не механической связью кривошипно-шатунного механизма, а соотношением нагрузки к силе расширяющихся газов. Степень сжатия, таким образом, у него получается переменной. Как следствие, этот двигатель можно просто настроить на бензин, дизельное топливо, этанол, природный газ, водород и т. д.
Первостепенная проблема — как снять мощность с такого двигателя, который механически представляет собой замкнутую систему? Как подключиться к поршню, который перемещается с высокой частотой?
Эта задача долго оставалась нерешенной, хотя попытки производились регулярно.
В частности об нее обломали зубы инженеры General Motors в 1960-х годах в процессе разработки компрессора экспериментального газотурбинного автомобиля.
Действующие образцы судовых насосов на основе свободнопоршневых двигателей в начале 1980-х были изготовлены французской компанией Sigma и британской Alan Muntz, но в серию они не пошли.
Растущий интерес к исследованиям и разработкам, а также инвестиции в эту технологию привели к появлению большего числа конфигураций прототипов двигателя со свободным поршнем.
В целом они могут быть различного типа: двухтактные с оппозитными поршнями, четырехтактные с оппозитными поршнями, двухтактные с одним поршнем и двухтактные с двумя поршнями, используя свечи зажигания или принцип дизельного двигателя и пр.
Известны даже двигатели со свободным поршнем, работающим по принципу Стирлинга.
Устроен двигатель просто. По сути, это цилиндр с глухими концами, внутри которого скользит поршень.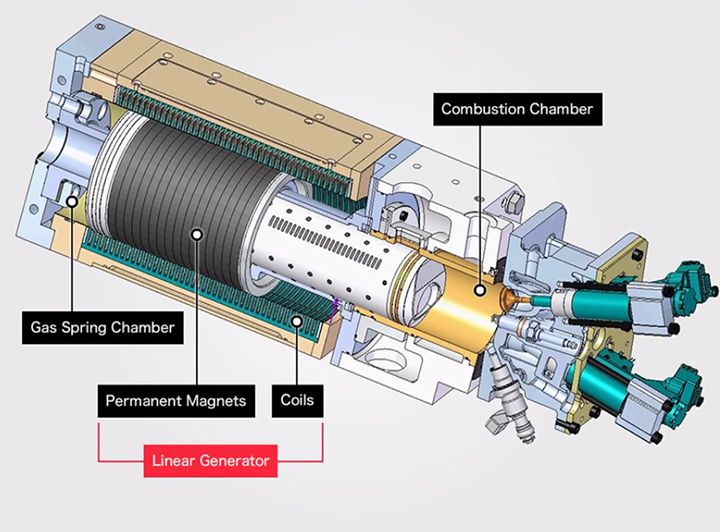 На каждом конце цилиндра – инжектор для впрыска топлива, впускное и выпускное окно или клапана.
На каждом конце цилиндра – инжектор для впрыска топлива, впускное и выпускное окно или клапана.
В зависимости от типа топлива к ним могут быть добавлены свечи зажигания. И все: меньше десятка простейших деталей и лишь одна — движущаяся.
Поршень в таком двигателе движется линейно, возвратно-поступательно, между двумя камерами сгорания.
Свободнопоршневой двигатель можно считать наиболее простой конструкцией хорошо приспособленной к требованиям массового производства, исходя из основных требований — простота, минимум подвижных звеньев, высокий КПД.
Преимущества свободнопоршневого двигателя заманчивы:
- организация и условия протекания рабочего процесса, которые обеспечивают высокие КПД и динамические показатели при отсутствии дымления (сажи) (преимущества свободного поршня в дизеле заключаются в оптимальном подводе тепла, отсутствии ограничений на жесткость и максимальное давление цикла, высокий механический КПД, незначительный (до 10%) провал коэффициента избытка воздуха при наборе нагрузки;
- многотопливность, возможность применения низкосортных альтернативных топлив и газов произвольного состава, включая сбросные и тощие (содержание метана более 10 – 20 % без потери мощности) с воспламенением от сжатия;
- динамическая уравновешенность, отсутствие вибраций;
- низкие затраты при эксплуатации и ремонте;
- высокие пусковые качества при низких температурах;
- возможность отключения одного или нескольких секций без остановки остальных;
- возможность повышения давления наддува и максимального давления сгорания;
- простота, надежность и технологичность конструкции;
- удобство компоновки в пространстве (возможен модульный принцип построения):
- удельная массовая и габаритная мощность значительно выше дизелей.
Свободнопоршневой двигатель можно считать наиболее простым по конструкции и хорошо приспособленным к требованиям массового производства среди всех используемых ДВС.
Устроен двигатель просто. По сути, это цилиндр с глухими концами, внутри которого скользит поршень. На каждом конце цилиндра – инжектор для впрыска топлива, впускное и выпускное окно или клапана.
В зависимости от типа топлива к ним могут быть добавлены свечи зажигания. И все: меньше десятка простейших деталей и лишь одна — движущаяся.
Поршень в таком двигателе движется линейно, возвратно-поступательно, между двумя камерами сгорания.
Свободнопоршневой двигатель. Источник: DLR
Однако не все так просто. Перед учеными стоят две важнейшие проблемы свободнопоршневого двигателя: отбор полученной мощности и управление капризным поршнем.
Не так то просто снять механически мощность с двигателя, представляющего собой замкнутую систему, и контролировать работу установки при частоте до 20 000 циклов в минуту. Кроме того, верхняя мертвая точка траектории зависит от степени сжатия и скорости сгорания топливного заряда.
Кроме того, верхняя мертвая точка траектории зависит от степени сжатия и скорости сгорания топливного заряда.
Фактически торможение поршня происходит за счет создания критического давления в камере и последующего самопроизвольного возгорания смеси. В обычном ДВС каждый последующий цикл является аналогом предыдущего благодаря жестким механическим связям между поршнями и коленчатым валом.
В свободнопоршневом же длительность тактов и верхняя мертвая точка — плавающие величины. Малейшая неточность в дозировке топливного заряда или нестабильность режима сгорания вызывают остановку поршня или удар в один из торцов цилиндра.
Таким образом, для двигателя такого типа требуется мощная и быстродействующая электронная система управления. Создать ее не так просто, как кажется. Многие эксперты считают эту задачу трудновыполнимой.
Гарри Смайт, научный руководитель лаборатории General Motors по силовым установкам, утверждает: «Двигатели внутреннего сгорания со свободным поршнем обладают рядом уникальных достоинств.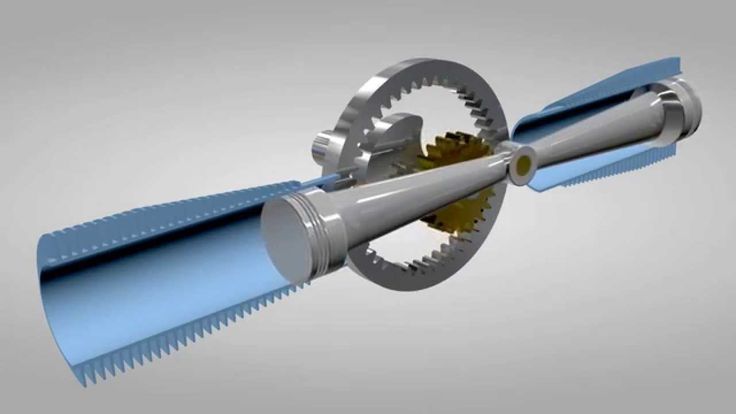 Но чтобы создать надежный серийный агрегат, нужно еще очень много узнать о его термодинамике и научиться управлять процессом сгорания смеси».
Но чтобы создать надежный серийный агрегат, нужно еще очень много узнать о его термодинамике и научиться управлять процессом сгорания смеси».
Ему вторит профессор Массачусетского технологического института Джон Хейвуд: «В этой области еще очень много белых пятен. Не факт, что для свободнопоршневого двигателя удастся разработать простую и дешевую систему управления».
Но наука и техника развиваются настолько стремительно, что проблемы, реализация которых была невозможна вчера, сегодня вполне реализуемые за счет новых материалов, технологий, микропроцессорной техники и интеллектуальных систем управления.
В этом двигателе нет коленвала
В ЭТОМ ДВИГАТЕЛЕ НЕТ КОЛЕНВАЛА
В начале изобретательской карьеры, 30 лет назад, Виталий Фролов еще не замахивался на то, чтобы изменить ДВС — ограничился малым: установил на коленвал особые накладки. Когда они изнашивались, менял их вместе с вкладышами, и вал продолжал работать.
Когда они изнашивались, менял их вместе с вкладышами, и вал продолжал работать.
Просто? Тем не менее, до этого раньше никто не додумался. Виталий получил первое авторское свидетельство, его наградили серебряной медалью Выставки достижений народного хозяйства СССР — в те времена считалось очень почетным стать лауреатом этой награды.
Так часто бывает: гениальные изобретения забываются. Чудесный коленвал так и не был внедрен…
Похоже, обида на неразумное человечество вылилась у Виталия в нелюбовь к коленчатым валам, и позже он беспощадно «уничтожал» деталь во всех своих последующих разработках. И сформулировал один из принципов: коленчатый вал — деталь несовершенная.
СТРАННЫЙ ОППОЗИТОднажды он получил заказ от специалистов воздушно-десантных войск: разработать двигатель — помощник суперсолдат. Мотор, сказали ему люди в мундирах, должен быть легким, экономичным, безотказным в воздухе, на земле и воде. И вскоре такой появился — 2-тактный оппозит, в основе которого лежал мотор «Иж-Юпитер 5».
Оппозит Фролова необычный — без уплотнительной перегородки между кривошипными камерами, так усложняющей конструкцию ординарных 2-цилиндровых двухтактников.
Коленчатый вал (до поры до времени Фролов оставил его в покое) — с двумя опорными подшипниками (вместо трех), что снизило его вес и длину.
В конструкции Фролов использовал два своих изобретения: «Демпфер крутильных колебаний коленчатого вала ДВС» и «Узел двигателя внутреннего сгорания».
Мотор получился компактным и «бодрым» — в 1,5 раза возросли мощность и крутящий момент. Он предназначался для сверхлегкой авиации, водномоторного спорта. В 1988 г. пришел заказ на изготовление 300 моторов для дельтапланов. Опытный мотор УМБ-760 устанавливался и на автомобиль ЛуАЗ, планировалось начать его серийный выпуск.
В 2001 году появился мотоцикл, который сразу привлек внимание байкеров. Еще бы: во время демонстрации работоспособности аппарата на второй передаче заднее колесо срывало в букс. Производство движка планировали развернуть на одном из харьковских заводов — для переоборудования обычных «Ижей». Но нагрянули известные события с распадом СССР, и проект так и остался невоплощенным.
Производство движка планировали развернуть на одном из харьковских заводов — для переоборудования обычных «Ижей». Но нагрянули известные события с распадом СССР, и проект так и остался невоплощенным.
Вконец разочаровавшись в коленчатых валах, Виталий Фролов увлекся бесшатунными двигателями Баландина. У этих моторов нет не только шатуна, но и коленчатого вала: преобразование возвратно-поступательного движения поршня в них происходит посредством особого эксцентрического механизма.
Недостаток баландинского «бесшатунника» — излишне высокие требования к точности изготовления эксцентрика. Модернизировав узел преобразования, Виталий изготовил два опытных мотора: один смонтировал в картере «Минска», использовав штатные цилиндр, головку, сцепление и КП. Второй по этой же схеме был от начала до конца самоделкой.
Иногда он давал мотогонщикам свои моторы — и те выигрывали. Техкомиссия их не засекала, потому что о необычных «внутренностях» никто и не догадывался: габариты двигателя оставались прежними.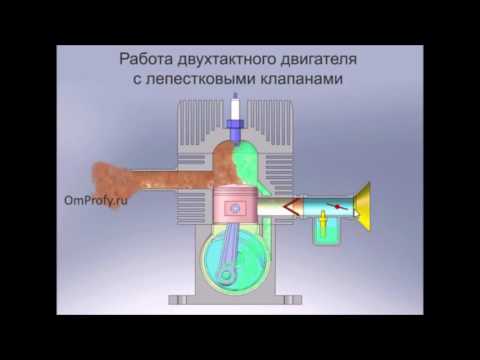
Настолько не догадывались, что однажды в гонках по спидвею победившего спортсмена дисквалифицировали с формулировкой… «опасно ехал». Но никто не продолжил мысль: ведь это происходило в силу избытка мощности мотора.
Никому в голову не пришло заглянуть вовнутрь.
И все равно, даже усовершенствованный «баландин» не устраивал изобретателя: механизм преобразования своей громоздкостью напоминал ненавистный коленчатый вал.
В этом двигателе нет коленвалаВ этом двигателе нет коленвала
Двигатель без коленвала своими руками
Главная » Новости
Рейтинг статьи Загрузка…
Иногда возникает необходимость замены цилиндро-поршневой группы. В этой статье описан порядок действий по ее замене.
Когда нужна замена цилиндро-поршневой группы(ЦПГ)?
Особенности подборки и замены ЦПГ
Удобней менять ЦПГ на снятом двигателе. Замена ЦПГ на двигателе, установленном на автомобиле возможна лишь на моторах, в которых вставные гильзы можно просто выбить.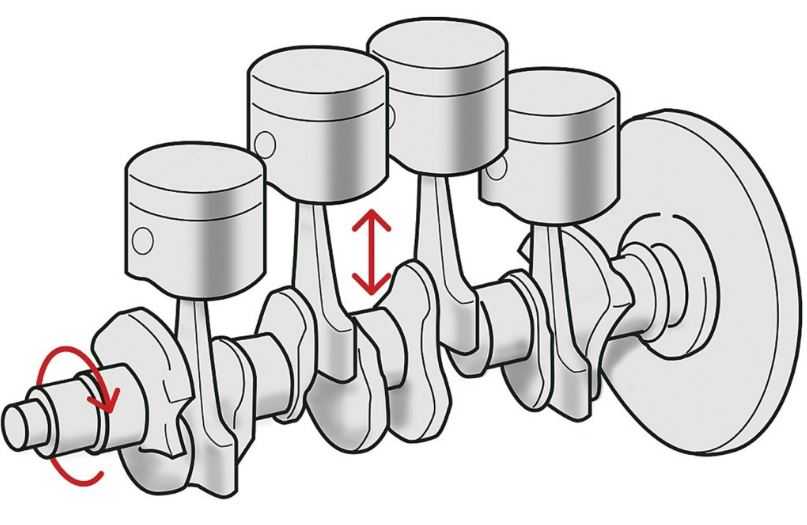
Замена ЦПГ
Для того, чтобы заменить ЦПГ, сделайте следующее: 1) Закатите автомобиль на яму. Можно делать и лежа под автомобилем, но неудобно. 2) Отключите и уберите аккумулятор. 3) Слейте масло и охлаждающую жидкость.
4) Если есть возможность снять двигатель, снимите и положите на моторный стол. Если нет, придется все делать на автомобиле. 5) Отсоедините все навесные узлы, карбюратор, коллекторы, гидроусилитель руля, инжектор. 6) Снимите головку блока цилиндров.
7) Снимите масляный поддон двигателя. 8) Открутите гайки бугелей шатунов, и снимите бугеля. 9) Осторожно постукивая рукояткой молотка, выбейте все поршни. 10) Положите вынутые поршни в керосин. Если вместе с ЦПГ меняете и шатуны, эта операция не нужна.
11) Подберите по весу поршень, палец и шатун для каждого цилиндра. 12) Специальным съемником извлеките гильзы из блока цилиндров.
13) Запрессуйте новые гильзы. В зависимости от модели двигателя могут понадобиться дополнительные действия.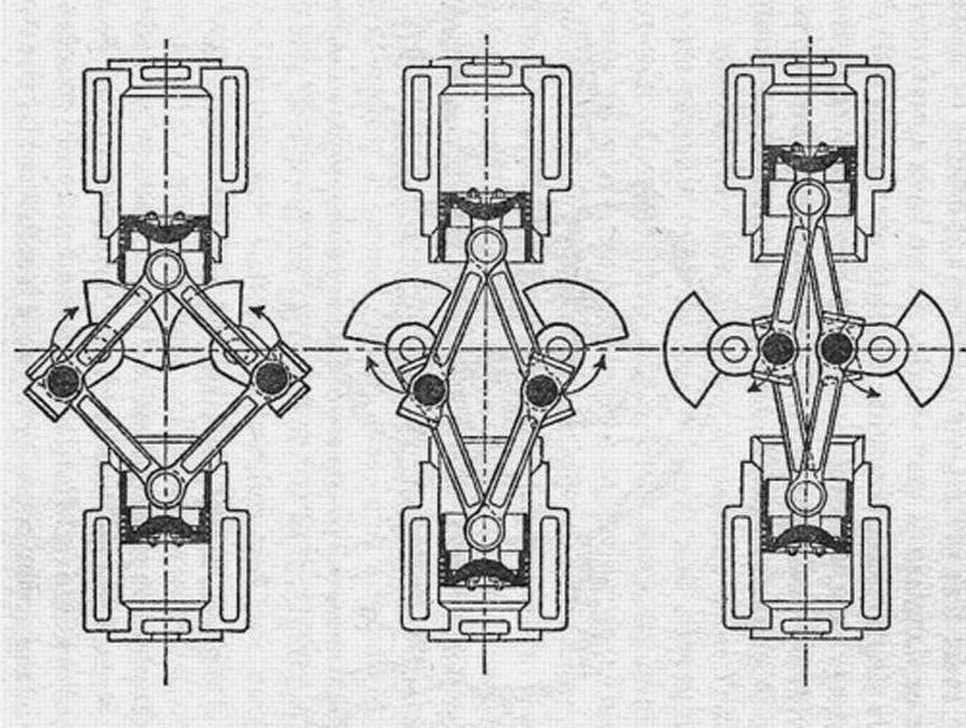 За подробностями обратитесь к инструкции по ремонту вашего автомобиля.
За подробностями обратитесь к инструкции по ремонту вашего автомобиля.
15) Оденьте на поршни поршневые кольца. Старайтесь не сломать их. Кольца должны подходить по размеру. Зазор установленного в гильзу кольца должен быть в пределах 0,2-0,9 мм. 16) С помощью оправки вставьте поршни в блок цилиндров, соблюдая направление. Чтобы выемки на поршнях совпадали с клапанами. 17) Очистите постели шатунов и вкладыши.
Смажьте вкладыши маслом, и установите их в постели. 18) Оденьте шатуны на коленчатый вал. 19) Очистите бугеля и вкладыши, смажьте вкладыши маслом, и установите в бугеля. 20) Оденьте бугеля каждый на свой шатун, и затяните. 21) Очистите привалочную поверхность блока цилиндров и головки блока цилиндров.
22) Поставьте новую прокладку головки блока цилиндров. 23) Установите и затяните головку блока цилиндров. 24) Установите и затяните прокладку и масляный поддон двигателя. 25) Поставьте и подключите все навесное оборудование. 26) Залейте охлаждающую жидкость и масло.
27) Поставьте аккумулятор.
28) Заведите двигатель и обкатайте на холостых оборотах в течение восьми — десяти часов.
29) Обкатайте автомобиль в движении.
Заменить ЦПГ сможет любой водитель. В этой статье описан порядок действий по замене, и некоторые секреты, которые позволят хорошо отремонтировать мотор.
Двигатель без коленвала: миф или реальность
Для тех, кто активно интересуется различными изобретениями, доработками и инновациями в сфере двигателестроения, следует обратить внимание на двигатель Ибадуллаева, а также на двигатель без коленчатого вала.
Если в первом случае речь идет о значительном увеличении степени сжатия и получении большой мощности без увеличения рабочего объема, то во втором следует понимать снижение механических потерь и рост КПД, расхода горючего, степени вибраций, общего веса ДВС и т.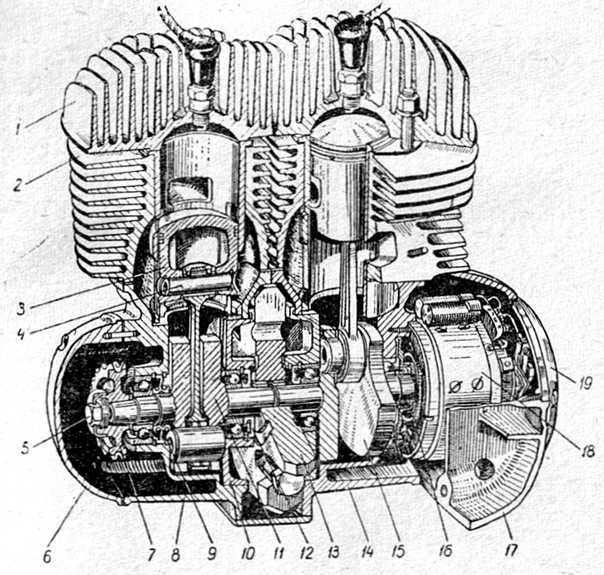 д. Давайте остановимся на моторе без коленвала более подробно.
д. Давайте остановимся на моторе без коленвала более подробно.
Bugatti Veyron W16
0 Смотреть все фото в галерее
Конечно, куда же без него, великий и могучий Veyron W16. Одни только цифры поражают: 8 литров, более 1000 лошадиных сил, 16 цилиндров – этот двигатель является самым мощным и сложным среди всех серийных автомобилей.
Он имеет 64 клапана, четыре турбины, W-компоновку – такого мы еще никогда не видели. И да, на него распространяется гарантия.
Такие двигатели являются удивительно редкими, поэтому мы должны ценить то, что нам удалось застать такие уникальные технологические прорывы.
Не тот гибрид
Возможно, в недалеком будущем мы увидим на автомобилях концерна GM двигатели, сочетающие в себе преимущества как дизельных, так и бензиновых моторов.
НА СОВРЕМЕННЫХ автомобилях в основном применяются два типа двигателей – бензиновые и дизельные. Первые отличаются высокой мощностью, вторые – хорошей тяговитостью и экономичностью.
Сейчас многие автопроизводители работают над созданием мотора, который совместил бы в себе оба эти достоинства.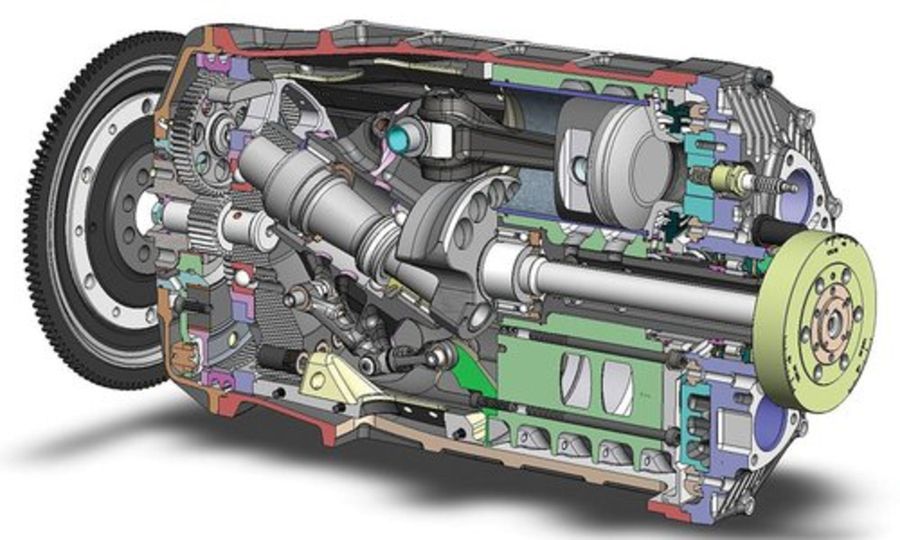 В принципе конструкция обычных бензиновых агрегатов уже стала очень похожей на дизель: непосредственный впрыск топлива позволил поднять степень сжатия до 13-14 единиц (против 17-19 у дизельных вариантов).
В принципе конструкция обычных бензиновых агрегатов уже стала очень похожей на дизель: непосредственный впрыск топлива позволил поднять степень сжатия до 13-14 единиц (против 17-19 у дизельных вариантов).
На экспериментальных моделях степень сжатия еще выше – 15-16 единиц. Однако для постоянного самовоспламенения смеси этого не всегда достаточно. Поэтому при запуске двигателя, а также при высоких нагрузках топливо поджигается обычной свечой.
При равномерном движении она отключается, и мотор переходит на “дизельный” режим работы, потребляя минимум топлива. Контролирует всю систему электроника, которая следит за условиями движения и при их изменении дает соответствующие команды исполнительным механизмам.
По словам разработчиков, подобные двигатели весьма экономичны и практически не загрязняют окружающую среду. Однако уже сейчас ясно, что стоимость автомобилей с такими моторами будет достаточно высокой. Найдут ли они свое место на рынке, пока сказать сложно.
Автор Юрий УРЮКОВ Издание Клаксон №24 2008 год Фото фото фирм-производителей
Knight Sleeve Valve
0 В начале прошлого века, Чарльз Йел Найт решил, что пора внести в конструкцию двигателей что-то новенькое, и придумал бесклапанный двигатель с гильзовым распределением. К всеобщему удивлению, технология оказалась рабочей. Такие двигатели были весьма эффективными, тихими и надежными.
Среди минусов можно отметить потребление масла. Двигатель был запатентован в 1908 году, а позднее появлялся во многих автомобилях, в том числе Mercedes-Benz, Panhard и Peugeot.
Технология отошла на задний план, когда двигатели стали быстрее крутиться, с чем традиционная клапанная система справлялась гораздо лучше.
Зачем нужно заливать моторное масло?
Смазочный материал необходим для каждого двигателя внутреннего сгорания. При его использовании необходимо соблюдать основные правила эксплуатации:
- Регулярно контролировать уровень моторного масла в картере двигателя при помощи специального масломерного щупа, чтобы не допустить масляного голодания.
- Производить полную замену жидкости в сервисном центре в соответствии с рекомендациями.
- Использовать качественный смазочный материал правильной степени вязкости, следуя указаниям автопроизводителя.
Современные машины обладают высокой надежностью, но это не является причиной для игнорирования данных требований.
Масляное голодание — этот термин применяется, когда рабочие элементы силового агрегата не получают смазки в достаточном количестве для предотвращения ускоренного износа или поломки двигателя.
Mazda Wankel Rotary
0 Пришел как-то один парень в офис Mazda, и предложил сделать двигатель, в котором трехконечный поршень должен вращаться в овальном пространстве. По сути, это напоминало футбольный мяч в стиральной машине, но по факту двигатель оказался удивительно сбалансированным.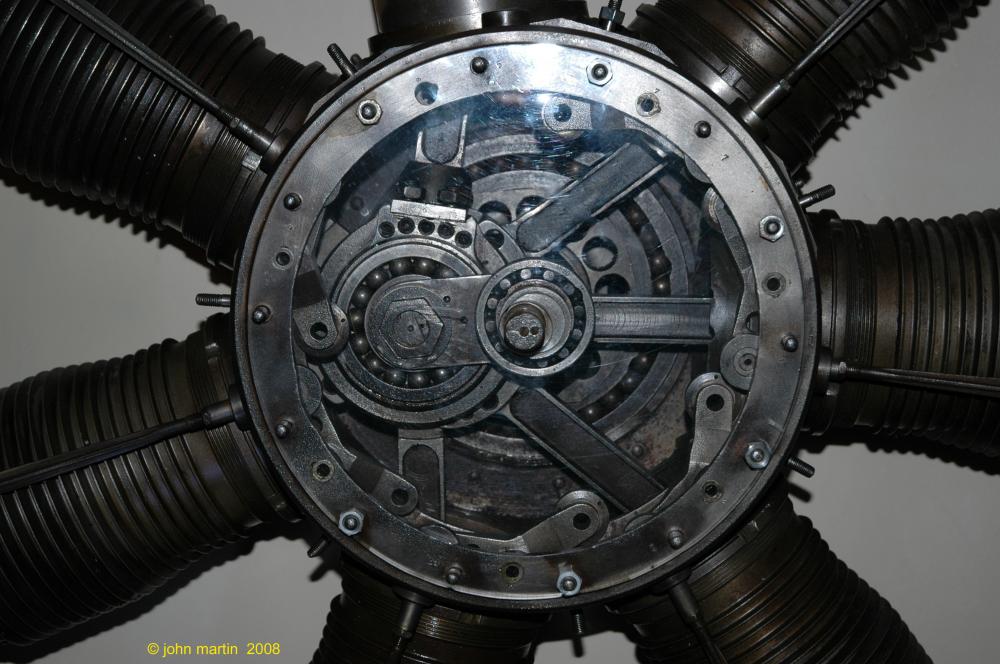
Вращаясь, ротор создает три небольших полости, которые отвечают за четыре фазы силового цикла: впрыск, компрессия, мощность и выхлоп. Звучит эффективно, и так оно и есть. Соотношение мощности и объема довольно высоко, но сам по себе движок нефонтанистый, потому что камера сгорания у него сильно удлинена. Странно, не так ли? А знаете, что еще более странно? Он всё еще в производстве.
Купите Mazda RX-8 и получите сумасшедший движок, который вращается до 9000 об/мин. Чего же вы ждете? Скорее в салон!
Без шатунов
Десятилетиями моторостроители стремились создать конструкцию д.в.с. без возвратно-поступательного движения – вроде роторно-поршневого двигателя Ванкеля. Или же сибирский роторный («Сибирский роторный», «Турбо», 2003, №10), где вместо поршней и вовсе лопасти…
Однако со временем пришло понимание, что дело не в возвратно-поступательном перемещении поршней [На самом деле поршни, возвратно-поступательно движущиеся в цилиндрах, не так уж и плохи: они образуют камеру сгорания довольно приличной конфигурации. Полусферическую, шатровую – с высоким термическим к.п.д.
Полусферическую, шатровую – с высоким термическим к.п.д.
В отличие от никуда не годной серповидной у двигателя Ванкеля, которая и погубила блестящую, на первый взгляд, идею.], а в недостатках древнего кривошипно-шатунного механизма. Надо каким-то образом избавляться от шатунов: наклоняясь к оси цилиндра, шатун создает мощную силу, прижимающую поршень к зеркалу (см. «Долгий путь к себе», «Турбо», 2002, №9).
Немалые потери трения и износ – на ровном, как говорится, месте.
Проекты бесшатунных д.в.с. известны много десятков лет – знаменитый двигатель Баландина и др. К сожалению, ни один не прижился в моторостроении – и не просто так; сложная и малонадежная конструкция всякий раз оказывалась неработоспособной в реальном времени. Что ж, конструкторская мысль не стоит на месте: познакомьтесь с проектом австралийских новаторов – под названием Revetec.
Принципиальная схема двигателя: ролики на штоках раздвигают 3-вершинные кулачки и заставляют их проворачиваться. И наоборот И наоборот |
Новый д.в.с. обходится не только без шатунов, но и без коленчатого вала; урезАть так урезать.
Как видно, противолежащие поршни соединены штоком (не шатун, поскольку не качается, не наклоняется), а между ними размещен вал с 3-вершинными кулачками.
Вернее, 2 соосных вала, вращающихся навстречу друг другу, – в том-то и прикол. Ролики на штоке работают по кулачкам и заставляют их проворачиваться; у Revetec оригинальный механизм называют Trilobe.
В принципе для работы двигателя достаточно одного-единственного вала, но тогда возникают все те же крайне неприятные боковые силы.
А когда кулачков 2 – и они действуют в режиме контрротации, — то боковые силы как раз взаимно нейтрализуются. Чем-то напоминает 2-шатунную конструкцию Р. Бейндла (см.
«Дизелек» — «Турбо», 2008, №3), хотя вместо 2-х параллельных коленвалов у Revetec 2 соосных – и без колен.
| Ранняя конструкция с пространственными штоками, соединяющими противолежащие поршни |
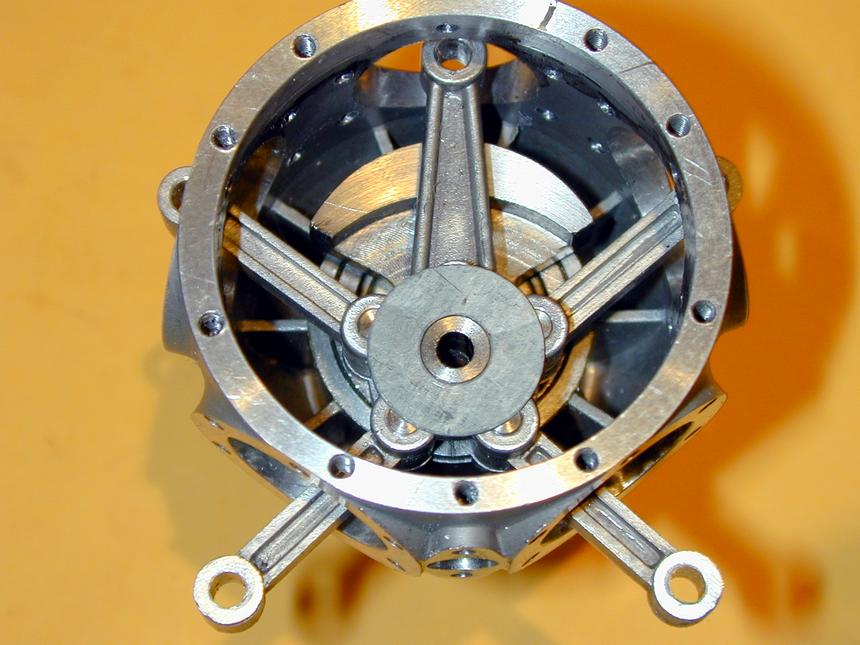
Представьте, работает. А поршни скользят в цилиндрах без трения! Австралийцы демонстрируют один агрегат за другим; последняя модель под обозначением X4v2 построена по «крестообразной» схеме. Здесь 4 поршня и 2 штока; ролики взаимодействуют с 4-я кулачками.
А поршни скользят в цилиндрах без трения! Австралийцы демонстрируют один агрегат за другим; последняя модель под обозначением X4v2 построена по «крестообразной» схеме. Здесь 4 поршня и 2 штока; ролики взаимодействуют с 4-я кулачками.
При диаметре цилиндров и ходе поршней 108 х 65 мм («ультракороткоходная» архитектура) рабочий объем «четверки» равен 2382 миллилитрам. Главная сложность – в синхронизации контрвращения 2-х валов; приходится применять вспомогательные валы с зубчатыми парами.
Тут не исключены вибрации и шум; впрочем, известны и другие способы согласования валов.
У X4v2 двойное зажигание (по 2 свечи на цилиндр) и простенький ГРМ со штангами и коромыслами: 2-клапанные головки цилиндров. По сведениям от Revetec, со степенью сжатия 9,5 бесшатунный двигатель развивает на стенде до 94 л.
с. при 3600 мин-1, наибольший крутящий момент – 202 Нм при 3 тыс. оборотов. Неплохо, а с 4-клапанным ГРМ тщательно доведенный двигатель покажет, наверное, гораздо большую отдачу, – скажем, 225 л.с. где-нибудь при 6500 мин-1.
| Продвинутая «крестообразная» конструкция с плоскими штоками |
Поскольку кулачки 3-вершинные, то валы делают один оборот на 6 ходов поршней (в одну сторону). Небыстро, и скорость качения роликов по рабочим поверхностям кулачков, по-видимому, не слишком высока.
Создатели бесшатунного двигателя подчеркивают его дополнительное преимущество: профиль кулачков задается более или менее свободно, и его нетрудно подобрать так, чтобы на рабочем ходе наивысшее давление газов приходилось на сравнительно круто спадающий участок. То, что специалисты называют leverage – плечо рычага.
От плеча опять же зависят потери трения; судя по всему, у Revetec механический к.п.д. в общем и целом выше, чем у обычных поршневых двигателей. Что и требовалось доказать.
Что и требовалось доказать.
| Плоские штоки (крестом) гораздо компактней |
Вообще-то «крестообразный» X4v2 задуман для легкой авиации; отсюда кое-какие особенности его конструкции. Вместе с тем новаторы настаивают на его полной пригодности для автотранспорта, а для наглядности смонтировали бесшатунный мотор на шасси 3-колки. Якобы гоняет безо всяких, хоть и не аэроплан.
Самодел X4v2 тянет на 130+ кг, но по оценкам его создателей, вес промышленного изделия нетрудно сократить килограммов до 105. Его габариты – 740х550х460 мм; вроде компактный агрегат. Принцип Revetec одинаково пригоден для двигателей с искровым зажиганием – и для дизелей. Для 4-тактного цикла – и для 2-тактного.
Нет вопросов; интересно, а что скажут автомобилестроители?
| Лихая 3-колка с двигателем Х4v2 |
Eisenhuth Compound
0 Джон Айзенхат знаменит тем, что изобрел интересный трехцилиндровый двигатель, в котором два крайних цилиндра питали средний, «мертвый» незажженный цилиндр своими выхлопными газами, который, в свою очередь, отвечал за выходящую энергию. Айзенхат пророчил своему двигателю 47-процентную экономию топлива. Через пару лет компания развалилась и обанкротилась. Делайте выводы.
Айзенхат пророчил своему двигателю 47-процентную экономию топлива. Через пару лет компания развалилась и обанкротилась. Делайте выводы.
Дышать во все клапаны
0 Источник:
Красный график демонстрирует кривую открытия впускного клапана, синий — выпускного.
Хорошо видно, что клапаны максимально долго пребывают в полностью открытом положении, — графики имеют почти прямоугольный профиль, тогда как с обычным ГРМ они были бы больше похожи на параболы.
Необходимые объемы газов проходят через клапаны Freevalve за меньший промежуток времени, чем обычно, поэтому короткие фазы впуска и выпуска не перекрываются. В этом кроется причина почти двукратного улучшения экологических показателей.
Panhard Flat-Twin
0 Французская компания Panhard стала известна благодаря своим интересным двигателям с алюминиевыми блоками. Их изюминкой является конструкция.
Суть в том, что блок и головка блока цилиндров сварены в единое целое. Объем двигателя составлял от 0. 61 до 0.85 литра, мощность – от 42 до 60 л.с, в зависимости от модели.
61 до 0.85 литра, мощность – от 42 до 60 л.с, в зависимости от модели.
Удивительный факт: этот двигатель является самым странным участником и победителем (!!!) гонок Le Mans.
Обработка коленвала
Коленвалы ДВС в процессе изготовления подвергаются механической и химико-термической обработкам. Так как коленчатый вал двигателей — это сложное устройство с высокой точностью, оно делается с высокими квалитетами только на заводах. Механобработка вала, в основном, понятна многим — это изменение формы по заданным параметрам.
Химическая обработка коленвалов — это закалка током высокой частоты (ТВЧ), азотирование, закалка поверхностного слоя. Изношенные азотированные валы не шлифуют, они подлежат замене. Благодаря всем этим хим и термическим обработкам повышается прочность и износоустойчивость.
Автор публикации
не в сети 1 неделя
Gobron Brillie Opposed Piston
0 Двигатель Commer TS3 построили, вдохновившись именно этим чудом инженерии родом из Франции. Поршни располагались противоположно друг другу. Первая пара отвечала за коленвал, вторая – за шатуны, соединенные с коленвалом под углом 180°.
Поршни располагались противоположно друг другу. Первая пара отвечала за коленвал, вторая – за шатуны, соединенные с коленвалом под углом 180°.
Компания производила широкий спектр двигателей, от двухцилиндровых объемом 2.3 литра, до шестицилиндровых объемом 11.4 литра. Был еще огромный 13.
5-литровый четырехцилиндровый гоночный движок, благодаря которому впервые была пройдена отметка скорости в 100 миль/час в 1904 году.
Двигатель BRM h26
Используется: с 1966 года
В 1966 году британская команда Формулы-1 British Racing Motors представила странный новый мотор для своего болида, который назывался BRM h26. Конструкция мотора, по сути, представляла два плоских восьмицилиндровых двигателя, установленных друг над другом. Каждый из них оснащался отдельным коленвалом, к которым были присоединены шестерни, что делало всю конструкцию очень тяжелой.
Этот мотор устанавливался на Lotus 43 (на фото), за рулем которого сидел Джим Кларко, ставший в 1966 году победителем Гран-при США.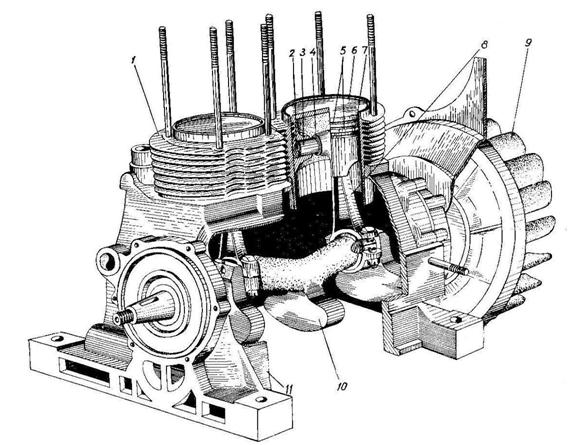 Однако это была единственная победа болида с двигателем h26. Вскоре разработка этого мотора прекратилась в пользу более прогрессивного двигателя V12.
Однако это была единственная победа болида с двигателем h26. Вскоре разработка этого мотора прекратилась в пользу более прогрессивного двигателя V12.
Adams-Farwell
Сама идея того, что сзади тебя в автомобиле вращается двигатель, довольно интересна, именно поэтому данный движок попал в наш список.
Вообще, вращался не весь двигатель, а только цилиндры и поршни, потому что коленвалы были прочно зафиксированы. Установленные по кругу цилиндры охлаждались воздухом и напоминали крутящееся колесо.
Сам двигатель устанавливался позади водительского места, которое было выдвинуто максимально вперед. Идеальная схема для летального исхода во время аварии.
Причины снижения уровня масла
Одной из главных причин снижения уровня масла в двигателе является естественный расход смазочного материала в процессе эксплуатации транспортного средства. Все автопроизводители предупреждают, что любая езда приводит к его расходу. Смазка расходуется, падает ее уровень. При замере это сразу видно, необходимо доливать жидкость по мере ее расходования.
Еще одна причина — несвоевременность замены отработанного вещества. Во время эксплуатации двигателя моторное масло превращается в густую массу. Она заполняет все отверстия и каналы, существенно снижая их проходимость. Отработанное масло не перетекает свободно по двигателю и не смазывает трущиеся поверхности рабочих деталей и узлов. Возникает масляное голодание.
Низкое качество смазочного материала также является причиной быстрого износа силового агрегата. Бывают случаи, когда смазочные материалы, даже известных мировых брендов, превращаются в вещество густой консистенции в течение небольших сроков эксплуатации. Это приводит к поломкам двигателя внутреннего сгорания.
Троянский конь
Уже сегодня у EcoMotors имеются три полностью готовых к производству оппозитных агрегата различной мощности: модуль мощностью 13,5 л.с. (размеры — 95 мм / 155 мм / 410 мм, вес — 6 кг), 40 л.с. (95 мм / 245 мм / 410 мм, 18 кг) и модуль 325л.с. (400 мм / 890 мм / 1000 мм, 100 кг).
Хоффбауэр и Колетти намерены продемонстрировать электрогибридный пятиместный седан среднего класса с дизельным генератором OPOC на базе одной из массовых моделей уже в текущем году.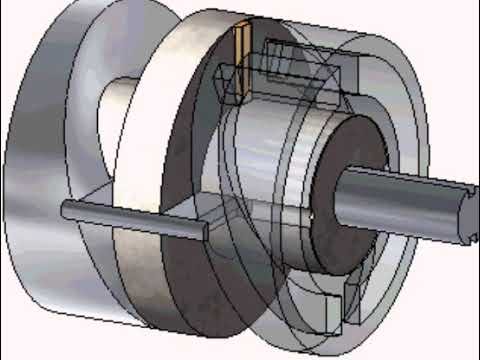 Средний расход солярки у этого автомобиля не превысит 2 л на сотню в комбинированном электрическом и смешанном режимах.
Средний расход солярки у этого автомобиля не превысит 2 л на сотню в комбинированном электрическом и смешанном режимах.
Недавно EcoMotors открыла собственный технический центр в городке Троя, штат Мичиган, и уже подыскивает подходящее предприятие для организации серийного производства своих моторов. Несмотря на рассекреченность проекта, из недр компании поступает крайне скудная информация.
По‑видимому, Винод Хосла решил придержать до поры убойные козыри.
Что такое коленчатый вал? | Как работает коленчатый вал?
Что такое коленчатый вал?Коленчатый вал представляет собой вал, приводимый в движение кривошипно-шатунным механизмом, состоящим из ряда кривошипов и шатунов, к которым прикреплены шатуны двигателя. Это механическая часть, способная выполнять преобразование возвратно-поступательного движения во вращательное.
Основное назначение этого шатуна — воспринимать возвратно-поступательное движение поршня и передавать его на коленчатый вал. Когда коленчатый вал приводится в движение шатуном, он преобразует это движение во вращательное и вращает маховик, который продолжает вращать колеса автомобиля.
Когда коленчатый вал приводится в движение шатуном, он преобразует это движение во вращательное и вращает маховик, который продолжает вращать колеса автомобиля.
Без кривошипа поршневой двигатель не может передавать возвратно-поступательное движение поршня на приводной вал. Проще говоря, поршневой двигатель не может привести в движение транспортное средство без коленчатого вала.
Различные двигатели проходят рабочий цикл с разным числом оборотов коленчатого вала. Например, двухтактный двигатель завершает рабочий цикл после одного оборота коленчатого вала, а четырехтактный двигатель завершает рабочий цикл после завершения двух оборотов коленчатого вала.
Коленчатые валы могут быть сварными, полуинтегральными или цельными. Этот компонент двигателя соединяет выходную часть двигателя с входной частью.
Кривошип действует как звено, которое обеспечивает выходную мощность в виде кинетической энергии вращения – поршень соединен с центром кривошипа через шатун. Кривошип позволяет поршню вращать коленчатый вал, создавая силу для движения автомобиля.
По сути, коленчатый вал выполняет простую задачу: переводить прямолинейное движение поршней во вращение. Он выполняет ту же работу, что и шатун велосипеда, который более или менее превращает движение ног вверх и вниз во вращение.
Хотя принцип прост, когда речь идет о высокопроизводительных двигателях, возникает множество сложностей. Сгорание топлива выбрасывает поршень прямо через цилиндр, работа коленчатого вала заключается в преобразовании этого линейного движения во вращение — в основном путем раскачивания поршня вперед и назад в цилиндре.
Терминология коленчатого вала довольно специфична, поэтому начнем с наименования нескольких деталей. Шейка – это часть вала, которая вращается в подшипнике. Как видно выше, на коленчатом валу есть два типа шеек — коренные шейки образуют ось вращения коленчатого вала, а шатунные шейки крепятся к концам шатунов, которые подходят к поршням.
Для дополнительной путаницы шатунные шейки обозначаются аббревиатурой шатунные шейки, а также обычно называются шатунными шейками или шатунными шейками. Шатунные шейки соединены с основными шейками перемычками.
Шатунные шейки соединены с основными шейками перемычками.
Расстояние между центром шейки коренного подшипника и центром шейки коленчатого вала называется радиусом кривошипа, также известным как ход кривошипа. Это измерение определяет диапазон хода поршня при вращении коленчатого вала — это расстояние сверху вниз называется ходом. Ход поршня в два раза больше радиуса кривошипа.
Задний конец коленчатого вала выходит за пределы картера и заканчивается фланцем маховика. Этот прецизионно обработанный фланец крепится болтами к маховику, большая масса которого помогает сгладить пульсацию поршней в разное время. Маховик передает вращение на колеса через коробку передач и главную передачу.
В автоматической коробке передач коленчатый вал крепится болтами к зубчатому венцу, который несет гидротрансформатор и передает привод на автоматическую коробку передач. По сути, это мощность двигателя, а энергия направляется туда, где она нужна: на гребные винты лодок и самолетов, на индукционные катушки генераторов и на опорные колеса транспортного средства.
Передний конец коленчатого вала, иногда называемый носовой частью, представляет собой вал, выходящий за пределы картера. Этот вал соединяется с шестерней, которая приводит в движение клапанный механизм через зубчатый ремень или цепь [или наборы шестерен в высокотехнологичных приложениях], и шкив, который использует приводной ремень для питания таких аксессуаров, как генератор переменного тока и водяной насос.
Части коленчатого валаСледующие приведены основные части коленчатого вала с его диаграммой:
- Crankpin
- Основные журналы
- Crank Web
- СПАСИТЕЛЯ
- TRAST WASHERS WILLE WILLE WILLE WILLE WILLE WIST WIST WIST WIST. монтажный фланец
Шатун является механической частью двигателя. Это позволяет очень прочно прикрепить шатун к коленчатому валу.
Поверхность шатунной шейки имеет цилиндрическую форму для передачи крутящего момента на большой конец шатуна. Они также известны как шатунные подшипники.
Они также известны как шатунные подшипники.
Журналы крепятся к блоку цилиндров. Эти подшипники удерживают коленчатый вал и обеспечивают его вращение в блоке цилиндров. Этот подшипник представляет собой, например, подшипник скольжения или опорный подшипник. Коренные подшипники различаются от двигателя к двигателю, часто в зависимости от сил, прилагаемых двигателем.
3. Шестерня кривошипаШестерня кривошипа является наиболее важной частью коленчатого вала. Перемычка кривошипа соединяет коленчатый вал с шейками коренных подшипников.
4. ПротивовесыПротивовесы представляют собой тип груза, который прикладывает противодействующую силу, которая обеспечивает баланс и устойчивость коленчатого вала. Они монтируются на шатуне.
Причина добавления противовесов к коленчатому валу заключается в том, что они могут устранить реакцию, вызванную вращением. И очень полезно получить более высокие обороты и поддерживать легкую работу двигателя.
В некоторых точках предусмотрены две или более упорных шайб для предотвращения продольного перемещения коленчатого вала. Эти упорные шайбы устанавливаются между обработанными поверхностями в перемычке и седле коленчатого вала.
С помощью упорных шайб можно легко поддерживать зазор и способствует уменьшению бокового смещения коленчатого вала. Во многих двигателях они сделаны как часть коренных подшипников, обычно в более старых типах используются отдельные шайбы.
6. Масляный канал и сальникиМасляный канал коленчатого вала пропускает масло от коренных шеек к большим концевым шейкам. Обычно отверстие просверливают в шейке кривошипа. Когда шатунная шейка находится в верхнем положении и силы сгорания толкают шатун вниз, масло может проникать между шейкой и подшипником.
Коленчатый вал немного выступает за картер с обоих концов. Это приведет к утечке масла с этих концов. Для предотвращения попадания масла в эти отверстия предусмотрены сальники.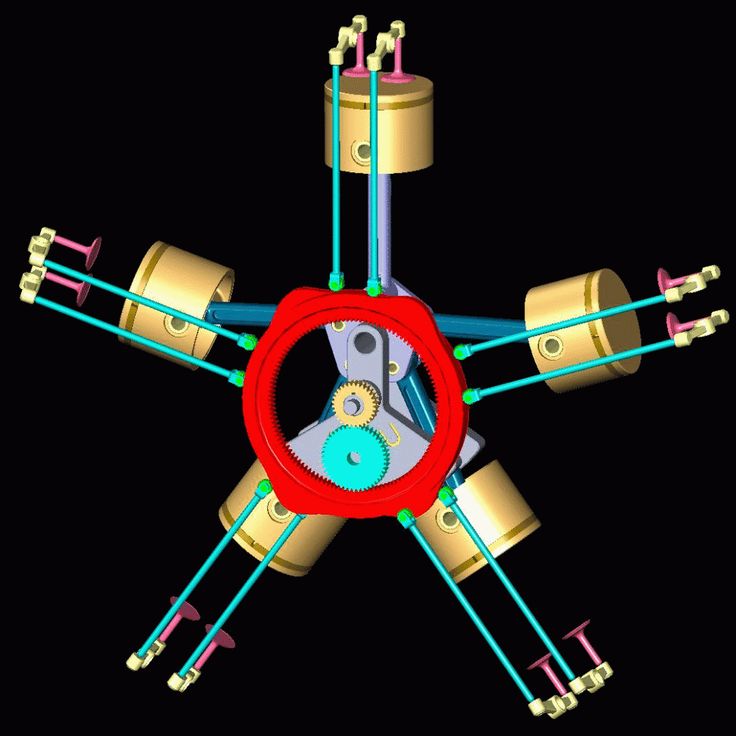 На переднем и заднем концах соединены два основных масляных уплотнения.
На переднем и заднем концах соединены два основных масляных уплотнения.
- Передние сальники: Очень похожи на задние сальники. Однако их отказ менее деструктивен и более доступен. Передний сальник устанавливается за шкивом и распределительным механизмом.
- Задние сальники: Устанавливаются в коренных шейках и маховиках. Он вставляется в отверстие между блоком двигателя и масляным поддоном. Масляное уплотнение имеет формованную кромку, которая плотно удерживается в коленчатом валу пружиной, называемой стягивающей пружиной.
В большинстве случаев коленчатый вал крепится к маховику через фланцы. Диаметр конца колеса коленчатого вала больше, чем другой конец. Это дает поверхность фланца для установки маховика.
Конструкция коленчатого вала
Для изготовления коленчатого вала использовались следующие материалы:
- Чугун
- Углеродистая сталь
- Микролегированная ванадием сталь
- Кованая сталь
Кривошип может быть собран из разных частей или выполнен цельным (монолитным).
Монолитная версия — самая популярная рукоятка во всем мире. Однако некоторые большие и малые двигатели внутреннего сгорания имеют сборные коленчатые валы.
Эти валы также могут быть отлиты из ковкого чугуна, модульной или ковкой стали. Сварные узлы отлиты из стали. Этот недорогой метод подходит для недорогих серийных двигателей с приемлемыми нагрузками. Процесс ковки имеет отличную прочность. Следовательно, ковка известна как предпочтительный метод изготовления коленчатых валов.
Что такое
Датчики коленчатого вала ?Датчик положения коленчатого вала крепится к блоку двигателя, обращенному к синхронизирующему ротору на коленчатом валу двигателя. Датчик обнаруживает сигналы, используемые ЭБУ двигателя для расчета положения коленчатого вала и скорости вращения двигателя.
Датчик коленчатого вала — это электронное устройство, используемое в двигателе внутреннего сгорания, как бензиновом, так и дизельном, для контроля положения или скорости коленчатого вала.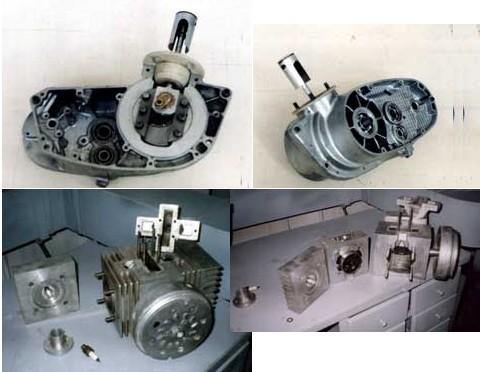 Эта информация используется системами управления двигателем для контроля времени впрыска топлива или зажигания, а также других параметров двигателя.
Эта информация используется системами управления двигателем для контроля времени впрыска топлива или зажигания, а также других параметров двигателя.
До того, как появились электронные датчики коленчатого вала, распределитель на бензиновых двигателях нужно было вручную устанавливать на метку синхронизации.
Датчик коленчатого вала можно использовать в сочетании с аналогичным датчиком положения распределительного вала для контроля соотношения между поршнями и клапанами в двигателе, что особенно важно в двигателях с регулируемой фазой газораспределения.
Этот метод также используется для «синхронизации» четырехтактного двигателя при запуске, чтобы система управления знала, когда впрыскивать топливо. Он также широко используется в качестве основного источника для измерения скорости вращения двигателя в оборотах в минуту.
Типы датчиков положения коленчатого вала
Существует 2 типа датчиков положения коленчатого вала.
- MPU, тип
- MRE, тип
34 зубца, расположенные через каждые 10° угла поворота коленчатого вала (CA), плюс два отсутствующих зубца для определения верхней мертвой точки (ВМТ) расположены по внешнему диаметру синхронизирующий ротор.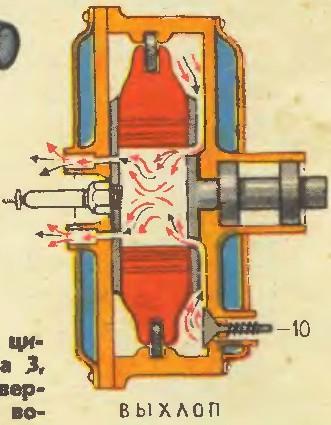 Таким образом, датчик выдает 34 волны переменного тока на каждый оборот коленчатого вала.
Таким образом, датчик выдает 34 волны переменного тока на каждый оборот коленчатого вала.
Эти волны переменного тока преобразуются в прямоугольные формы с помощью схемы формирования формы волны в ЭБУ двигателя и используются для расчета положения коленчатого вала, ВМТ и частоты вращения коленчатого вала.
Тип MREИз-за вращения ротора таймера направление магнитного поля (магнитного вектора), излучаемого магнитом датчика, изменяется в соответствии с положением зубца обнаружения в течение времени, когда зубец обнаружения прикреплен к Ротор таймера приближается к датчику положения распределительного вала, а затем удаляется от датчика положения распределительного вала.
В результате значение сопротивления MRE также изменяется. Напряжение от ЭБУ двигателя подается на датчик положения распределительного вала, и изменение значения сопротивления MRE выводится как изменение напряжения.
Выходные сигналы двух MRE дифференциально усиливаются и преобразуются в прямоугольную форму с помощью схемы усиления/формирования сигнала в датчике. Затем выходные данные MRE отправляются в блок управления двигателем.
Затем выходные данные MRE отправляются в блок управления двигателем.
Другой тип датчика кривошипа используется на велосипедах для контроля положения кривошипа, обычно для считывания частоты педалирования велокомпьютера. Обычно это герконы, установленные на раме велосипеда с соответствующим магнитом, прикрепленным к одному из шатунов педали.
Общий коленчатый вал и симптомы сбоя датчика коленчатого вала- Проверка двигателя. Общие причины отказа
Со временем любой датчик выходит из строя из-за несчастных случаев, проблем с питанием или естественного износа. Из-за отказа датчика положения коленчатого или распределительного вала двигатель может заглохнуть, заглохнуть во время движения или отказаться запускаться.
Неисправный датчик может привести к катастрофическому отказу двигателя.
Часто задаваемые вопросы.
Что такое коленчатый вал?
Коленчатый вал представляет собой вал, приводимый в движение кривошипно-шатунным механизмом, состоящим из ряда кривошипов и шатунов, к которым прикреплены шатуны двигателя.
 Это механическая часть, способная выполнять преобразование возвратно-поступательного движения во вращательное.
Это механическая часть, способная выполнять преобразование возвратно-поступательного движения во вращательное.H коленчатый вал работает
По сути, коленчатый вал выполняет простую задачу: перевести прямолинейное движение поршней во вращение . Он выполняет ту же работу, что и шатун велосипеда, который более или менее превращает движение ног вверх и вниз во вращение.
Что такое датчик коленчатого вала?
Датчик коленчатого вала — это электронное устройство, используемое в двигателе внутреннего сгорания, как бензиновом, так и дизельном, для контроля положения или скорости вращения коленчатого вала. Эта информация используется системами управления двигателем для управления впрыском топлива или синхронизацией системы зажигания и другими параметрами двигателя.
Коленчатые валы поршневых двигателей
Коленчатый вал устанавливается параллельно продольной оси картера и обычно поддерживается коренным подшипником между каждым броском. Коренные подшипники коленчатого вала должны быть жестко закреплены в картере. Обычно это достигается с помощью поперечных ребер в картере, по одному на каждый коренной подшипник. Стенки составляют неотъемлемую часть конструкции и, помимо поддержки основных подшипников, повышают прочность всего корпуса. Картер разделен на две секции в продольной плоскости. Это разделение может быть в плоскости коленчатого вала, так что половина коренного подшипника (а иногда и подшипников распределительного вала) находится в одной части корпуса, а другая половина — в противоположной части. [Рисунок 1] Другой метод заключается в разделении картера таким образом, чтобы коренные подшипники крепились только к одной секции картера, к которой прикреплены цилиндры, тем самым обеспечивая средства снятия секции картера для осмотра, не нарушая регулировка подшипника.
Коренные подшипники коленчатого вала должны быть жестко закреплены в картере. Обычно это достигается с помощью поперечных ребер в картере, по одному на каждый коренной подшипник. Стенки составляют неотъемлемую часть конструкции и, помимо поддержки основных подшипников, повышают прочность всего корпуса. Картер разделен на две секции в продольной плоскости. Это разделение может быть в плоскости коленчатого вала, так что половина коренного подшипника (а иногда и подшипников распределительного вала) находится в одной части корпуса, а другая половина — в противоположной части. [Рисунок 1] Другой метод заключается в разделении картера таким образом, чтобы коренные подшипники крепились только к одной секции картера, к которой прикреплены цилиндры, тем самым обеспечивая средства снятия секции картера для осмотра, не нарушая регулировка подшипника.Рис. 1. Типовой оппозитный двигатель в разобранном виде на узлы Коленчатый вал является основой поршневого двигателя.
 На него действует большая часть сил, развиваемых двигателем. Его основное назначение — преобразовать возвратно-поступательное движение поршня и шатуна во вращательное движение для вращения гребного винта. Коленчатый вал, как следует из названия, представляет собой вал, состоящий из одного или нескольких кривошипов, расположенных в определенных точках по его длине. Шатуны или шатуны формируются путем ковки выступов в вал перед его механической обработкой. Поскольку коленчатые валы должны быть очень прочными, их обычно выковывают из очень прочного сплава, такого как хромоникелевомолибденовая сталь.
На него действует большая часть сил, развиваемых двигателем. Его основное назначение — преобразовать возвратно-поступательное движение поршня и шатуна во вращательное движение для вращения гребного винта. Коленчатый вал, как следует из названия, представляет собой вал, состоящий из одного или нескольких кривошипов, расположенных в определенных точках по его длине. Шатуны или шатуны формируются путем ковки выступов в вал перед его механической обработкой. Поскольку коленчатые валы должны быть очень прочными, их обычно выковывают из очень прочного сплава, такого как хромоникелевомолибденовая сталь.Коленчатый вал может быть цельным или составным. На рис. 2 показаны два репрезентативных типа сплошных коленчатых валов, используемых в авиационных двигателях. Четырехрядная конструкция может использоваться как на четырехцилиндровых горизонтально-оппозитных, так и на четырехцилиндровых рядных двигателях. Шестиходовой вал используется в шестицилиндровых рядных двигателях, 12-цилиндровых двигателях V-образного типа и шестицилиндровых оппозитных двигателях.
 Коленчатые валы радиальных двигателей могут быть однорядными, двухрядными или четырехрядными, в зависимости от того, является ли двигатель однорядным, двухрядным или четырехрядным.
Коленчатые валы радиальных двигателей могут быть однорядными, двухрядными или четырехрядными, в зависимости от того, является ли двигатель однорядным, двухрядным или четырехрядным.Рисунок 2. Цельные типы коленчатых валов детали — шейка, шатунная шейка и шатунная щека. Противовесы и демпферы, хотя и не являются настоящей частью коленчатого вала, обычно прикрепляются к нему для уменьшения вибрации двигателя. Рис. 3. Коленчатый вал одноходового радиального двигателя Шейка поддерживается и вращается в коренном подшипнике. Он служит центром вращения коленчатого вала. Он имеет поверхностную закалку для уменьшения износа. Шатун — это часть, к которой крепится шатун. Он смещен от центра основных журналов и часто называется броском.
 Две щеки кривошипа и шатунная шейка делают бросок. Когда сила прикладывается к шатунной шейке в любом направлении, кроме параллельного или перпендикулярного к центральной линии коленчатого вала и через нее, это заставляет коленчатый вал вращаться. Внешняя поверхность закалена азотированием для повышения износостойкости и обеспечения требуемой опорной поверхности. Шатунная шейка обычно полая. Это уменьшает общий вес коленчатого вала и обеспечивает проход для передачи смазочного масла. На ранних двигателях полая шатунная шейка также служила камерой для сбора шлама, нагара и других посторонних материалов. Центробежная сила выбрасывала эти вещества за пределы камеры и не позволяла им достичь поверхности шатунного подшипника. Из-за использования беззольных масел-диспергаторов в новых двигателях больше не используются шламовые камеры. На некоторых двигателях в щеке коленчатого вала просверливается канал, через который масло из полого коленчатого вала может распыляться на стенки цилиндров. Щека кривошипа соединяет шатунную шейку с коренной шейкой.
Две щеки кривошипа и шатунная шейка делают бросок. Когда сила прикладывается к шатунной шейке в любом направлении, кроме параллельного или перпендикулярного к центральной линии коленчатого вала и через нее, это заставляет коленчатый вал вращаться. Внешняя поверхность закалена азотированием для повышения износостойкости и обеспечения требуемой опорной поверхности. Шатунная шейка обычно полая. Это уменьшает общий вес коленчатого вала и обеспечивает проход для передачи смазочного масла. На ранних двигателях полая шатунная шейка также служила камерой для сбора шлама, нагара и других посторонних материалов. Центробежная сила выбрасывала эти вещества за пределы камеры и не позволяла им достичь поверхности шатунного подшипника. Из-за использования беззольных масел-диспергаторов в новых двигателях больше не используются шламовые камеры. На некоторых двигателях в щеке коленчатого вала просверливается канал, через который масло из полого коленчатого вала может распыляться на стенки цилиндров. Щека кривошипа соединяет шатунную шейку с коренной шейкой.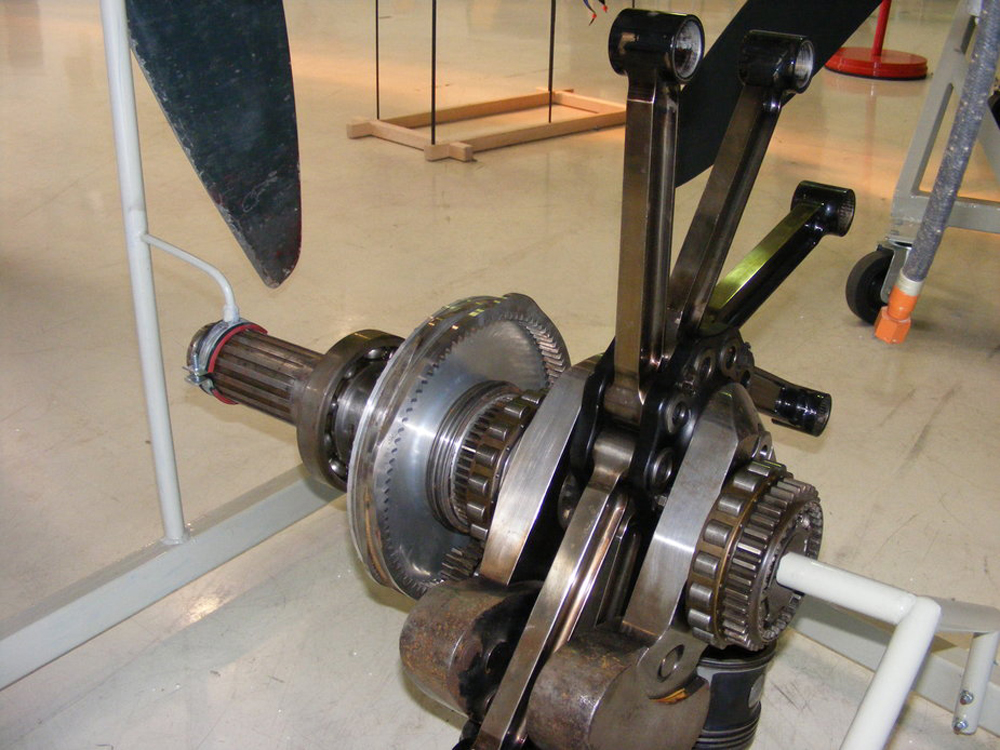 В некоторых конструкциях щека выходит за пределы шейки и несет противовес для балансировки коленчатого вала. Щека кривошипа должна иметь прочную конструкцию, чтобы обеспечить требуемую жесткость между шатунной шейкой и шейкой.
В некоторых конструкциях щека выходит за пределы шейки и несет противовес для балансировки коленчатого вала. Щека кривошипа должна иметь прочную конструкцию, чтобы обеспечить требуемую жесткость между шатунной шейкой и шейкой.Во всех случаях тип коленчатого вала и количество шатунных шеек должны соответствовать расположению цилиндров двигателя. Положение кривошипов на коленчатом валу по отношению к другим кривошипам того же вала выражается в градусах.
Самый простой коленчатый вал – одноходовой или 360°. Этот тип используется в однорядном радиальном двигателе. Он может быть построен из одной или двух частей. При использовании этого типа коленчатого вала предусмотрены два коренных подшипника (по одному на каждом конце). Двухходовой или 180-градусный коленчатый вал используется на двухрядных радиальных двигателях. В двигателе радиального типа предусмотрен один ход на каждый ряд цилиндров.
Балансировка коленчатого вала
Чрезмерная вибрация в двигателе приводит не только к усталостному разрушению металлических конструкций, но и к быстрому износу движущихся частей.
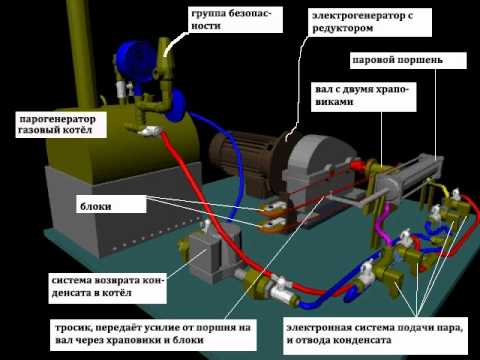 В некоторых случаях чрезмерная вибрация вызвана неуравновешенным коленчатым валом. Коленчатые валы сбалансированы для статической и динамической балансировки. Коленчатый вал статически уравновешен, когда вес всей сборки шатунов, щечек кривошипа и противовесов уравновешен вокруг оси вращения. При проверке на статическую уравновешенность его помещают на две кромки ножей. Если вал имеет тенденцию поворачиваться в каком-либо одном положении во время испытания, он не находится в статическом равновесии.
В некоторых случаях чрезмерная вибрация вызвана неуравновешенным коленчатым валом. Коленчатые валы сбалансированы для статической и динамической балансировки. Коленчатый вал статически уравновешен, когда вес всей сборки шатунов, щечек кривошипа и противовесов уравновешен вокруг оси вращения. При проверке на статическую уравновешенность его помещают на две кромки ножей. Если вал имеет тенденцию поворачиваться в каком-либо одном положении во время испытания, он не находится в статическом равновесии.Динамические демпферы
Коленчатый вал является динамически сбалансированным, когда все силы, создаваемые вращением коленчатого вала, и импульсы мощности уравновешиваются внутри себя, так что при работе двигателя возникает небольшая вибрация или она вообще отсутствует. Для снижения вибрации до минимума во время работы двигателя на коленчатый вал встроены динамические демпферы. Динамический демпфер — это просто маятник, прикрепленный к коленчатому валу так, что он может свободно двигаться по малой дуге.
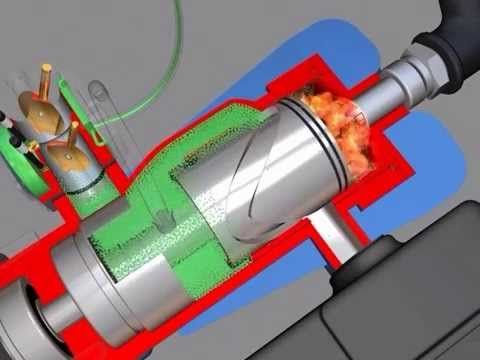 Он встроен в узел противовеса. Некоторые коленчатые валы включают два или более таких узла, каждый из которых прикреплен к разной щеке кривошипа. Расстояние, которое проходит маятник, а значит, и частота его колебаний, соответствует частоте силовых импульсов двигателя. Когда возникает частота вибрации коленчатого вала, маятник колеблется не синхронно с вибрацией коленчатого вала, тем самым сводя вибрацию к минимуму.
Он встроен в узел противовеса. Некоторые коленчатые валы включают два или более таких узла, каждый из которых прикреплен к разной щеке кривошипа. Расстояние, которое проходит маятник, а значит, и частота его колебаний, соответствует частоте силовых импульсов двигателя. Когда возникает частота вибрации коленчатого вала, маятник колеблется не синхронно с вибрацией коленчатого вала, тем самым сводя вибрацию к минимуму.Конструкция динамического демпфера, используемого в одном двигателе, состоит из подвижного стального противовеса с прорезями, прикрепленного к щеке кривошипа. Два стальных штифта в форме катушек входят в прорезь и проходят через увеличенные отверстия в противовесе и щеке кривошипа. Разница в диаметре между штифтами и отверстиями обеспечивает эффект маятника. Аналогия работы динамического демпфера показана на рис. 4.
0254 СВЯЗАННЫЕ ПОСТЫ
Датчик положения коленчатого вала (CKP)
Общее описание
Датчик положения коленчатого вала (CKP), без которого невозможна работа системы впрыска топлива. Дефекты в ДПКВ неизбежно приводят к отказу двигателя, и машина не заводится. Датчик положения коленчатого вала (ДКП) представляет собой электромагнитный датчик, с помощью которого система впрыска топлива осуществляет синхронизацию работы топливных форсунок и системы зажигания. Датчик СКР посылает сигнал о частоте вращения и положении коленчатого вала на бортовой контроллер. Этот сигнал представляет собой серию повторяющихся импульсов электрического напряжения, генерируемых датчиком при вращении коленчатого вала. На основе этих импульсов бортовой контроллер управляет топливными форсунками и системой зажигания.
Дефекты в ДПКВ неизбежно приводят к отказу двигателя, и машина не заводится. Датчик положения коленчатого вала (ДКП) представляет собой электромагнитный датчик, с помощью которого система впрыска топлива осуществляет синхронизацию работы топливных форсунок и системы зажигания. Датчик СКР посылает сигнал о частоте вращения и положении коленчатого вала на бортовой контроллер. Этот сигнал представляет собой серию повторяющихся импульсов электрического напряжения, генерируемых датчиком при вращении коленчатого вала. На основе этих импульсов бортовой контроллер управляет топливными форсунками и системой зажигания.Внешний вид
Типовой датчик СКР показан на рис.1.
Рис. 1Принцип работы пары шестерня коленчатого вала – датчик положения коленчатого вала
Положение коленчатого вала устанавливается на консоли к зубчатому колесу коленчатого вала.
Рис. 2 Рис. 3
3
Воздушный зазор расположен между датчиком и зубчатым колесом. Этот зазор должен составлять примерно 1 мм ± 0,4 мм и достигается подбором соответствующих шайб (рис. 2 и рис. 3).
Зубчатое колесо коленчатого вала изготавливается в виде специального диска, который обычно имеет 58 зубьев через каждые 6 градусов. Отсутствуют два зубца, которые используются для генерации импульса синхронизации (рис. 2 и рис. 3). Вращение коленчатого вала вызывает изменение магнитного поля датчика и, таким образом, создает импульсы напряжения. Через синхронизацию импульсов от датчика CKP бортовой контроллер определяет положение и скорость коленчатого вала и вычисляет точный момент работы топливных форсунок и точный момент для образования искры. Начало 20-го зуба (после отсутствующих) зубчатого колеса совпадает с верхней мертвой точкой (ВМТ) первого и четвертого цилиндров.
Зубчатое колесо может быть литым, неметаллическим или демпферным (с резиновой изоляцией). За время эксплуатации автомобиля износа неметаллической шестерни не наблюдалось. Единственное, за чем стоит следить, так это за недопущением попадания мелких частиц и грязи между зубами. Если зубчатое колесо с демпфером, то его состояние следует контролировать на предмет повреждения демпфера, так как это может привести к проблемам с двигателем. При ремонте следует соблюдать осторожность, чтобы не допустить деформации зубчатого колеса, так как это может привести к поломке двигателя. Визуально наблюдать за зубчатым колесом можно со стороны правого переднего колеса, как показано на рис. 4.
За время эксплуатации автомобиля износа неметаллической шестерни не наблюдалось. Единственное, за чем стоит следить, так это за недопущением попадания мелких частиц и грязи между зубами. Если зубчатое колесо с демпфером, то его состояние следует контролировать на предмет повреждения демпфера, так как это может привести к проблемам с двигателем. При ремонте следует соблюдать осторожность, чтобы не допустить деформации зубчатого колеса, так как это может привести к поломке двигателя. Визуально наблюдать за зубчатым колесом можно со стороны правого переднего колеса, как показано на рис. 4.
Рис. 4Используемые типы датчиков
СКР делятся на два типа:- Индуктивные
- Эффект датчика Холла
В индуктивных чувствительный элемент имеет сердечник намагничивания и обмотку из медного проводника, закрепленную на изолированной катушке.
Датчики Холла используют «эффект Холла», выражающий влияние магнитного поля на полупроводниковый датчик.

Типичные признаки неисправности CKP и зубчатого колеса коленчатого вала
В случае выхода из строя CKP или шестерни коленчатого вала бортовой контроллер регистрирует неисправность и включает контрольную лампу «CHECK ENGINE». К неисправностям этих элементов можно отнести следующие симптомы:- неустойчивый холостой ход
- самопроизвольное повышение и понижение оборотов двигателя;
- остановка двигателя;
- двигатель не заводится;
- плохая работа двигателя;
- стук при разгоне;
- Пропуски зажигания в двигателе.
На рис.5 и рис.6 показано зубчатое колесо коленчатого вала с поврежденным демпфером. Эта неисправность делает невозможной правильную синхронизацию фаз впрыска и зажигания, так как внутренняя часть смещена к зубчатому колесу и, следовательно, фазы впрыска и зажигания сдвинуты друг относительно друга.
Рис. 5 Рис.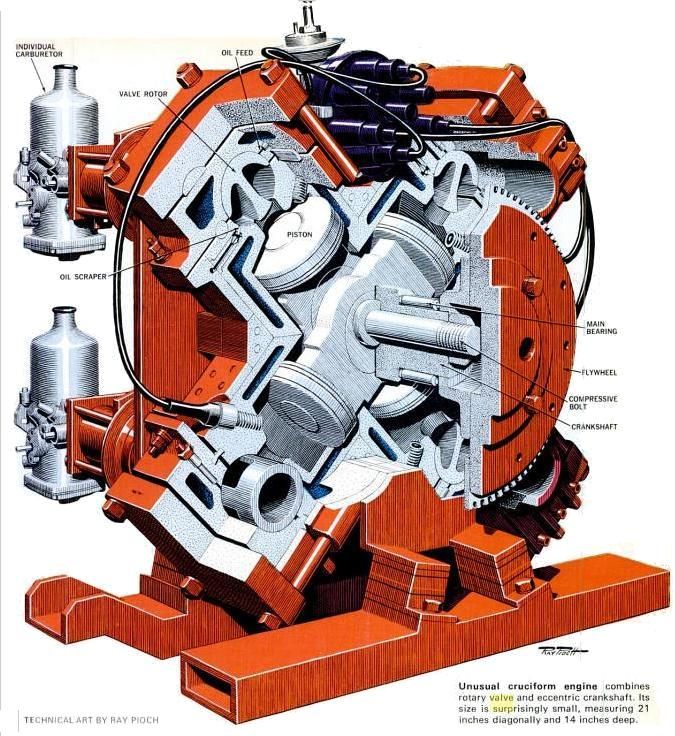 6
6Процедура проверки состояния СКР
- Выполните внешний визуальный осмотр CKP и зубчатого колеса коленчатого вала.
- Проверьте жгут CKP на предмет коррозии и повреждений.
- Убедитесь, что штифты жгутов надежно закреплены на своих местах и имеется хороший электрический контакт.
- Убедитесь, что воздушный зазор между зубчатым колесом и датчиком положения коленчатого вала находится в допустимых пределах.
- Отсоедините жгут датчика.
- Измерить омметром активное сопротивление между выводами ДКП. Проверьте по базе данных, какое должно быть значение измеренного сопротивления датчика для соответствующей марки и модели автомобиля. Если показания показывают чрезвычайно высокое сопротивление, это означает, что в датчике имеется обрыв. Нулевая или близкая к нулю индикация означает короткое замыкание в катушке.
ПРИМЕЧАНИЕ. Несмотря на то, что измеренное сопротивление находится в допустимых пределах, это не может рассматриваться как свидетельство того, что CKP сможет выдавать правильный сигнал.
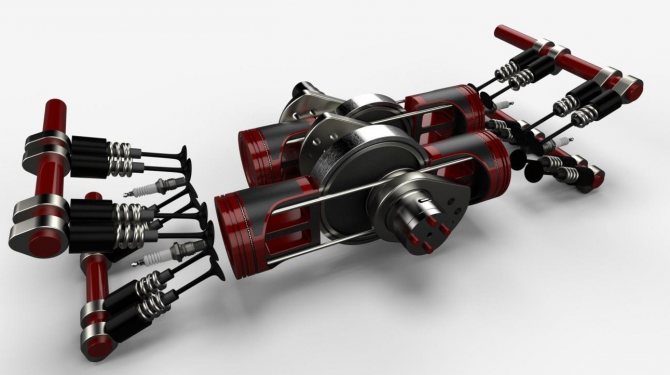
Проверьте экранированный кабель CKP:
- CKP может иметь экранированный кабель (не во всех случаях). Разденьте муфту жгута.
- Подключить один из щупов омметра к одному из выводов СКР (1 или 2).
- Подключите другой зонд к клемме, соответствующей экрану. Чтение должно склоняться к бесконечному сопротивлению.
- Переместите зонд с клеммы экрана и подключите его к земле. Показания должны стремиться к бесконечности.
Примечание. В некоторых системах экранирующий кабель CKP соединен с кабелем обратной связи CKP с землей. В этом случае омметр покажет короткое замыкание, что является нормальным для данной системы . Исследуйте электрическую цепь тестируемой системы, чтобы определить, как именно подключен CKP. - Вставьте разъем датчика.
Измерения осциллографом
— Датчик индуктивного типа —
Активный конец измерительного щупа подключите к одному из выводов CKP, а другой конец к земле. Наверх
Наверх