Типи електродвигунів, принципи їх роботи та особливості
Складно недооцінити роль сучасних електродвигунів. Це промислові і побутові агрегати, що виконують різну роботу: від забезпечення працездатності будівельної техніки до виконання виробничих завдань. На українському ринку великою популярністю користуються мотори змінного струму. Це однофазні і трифазні агрегати, які використовуються в різних умовах. Особливо затребувана серія АИР. У деяких випадках доречніше застосування електродвигунів постійного струму. Вони володіють унікальними особливостями. Сьогодні ми обговоримо типи моторів, чим відрізняються різні моделі (числом оборотів, кліматичним виконанням і ін), звернемо увагу на серію асинхронних двигунів АИР.
Види електричних двигунів і принципи їх роботи
Електродвигуном називають пристрій, що перетворює електричну енергію в механічну. Саме тому його ключовими характеристиками є потужність і число оборотів в хвилину. Переважна більшість однофазних, трифазних та інших моторів складається з двох частин: ротора і статора. Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Існує безліч способів класифікації електродвигунів. Початковим є поділ за типом живлення. Виділяють два види двигунів:
- постійного струму;
- змінного струму.
Чим відрізняються вони один від одного у використанні? Двигуни постійного струму характеризуються рівномірним обертанням. Їх встановлюють в електротранспорті, бурових верстатах, підйомно-транспортних машинах і т. д. Двигуни змінного струму дешевше у виготовленні, надійніше в експлуатації. Вони також поділяються на різні додаткові типи:
- побутові та промислові;
- синхронні і асинхронні;
- однофазні і трифазні.
Яскравим представником пристроїв даного типу є електродвигун АИР. Це асинхронний двигун змінного струму, який знайшов собі застосування в промисловій та побутовій сфері. Двигуни АИР випускаються як в однофазному (живляться від мережі 220 В), так і в трифазному виконанні. На ринку можна знайти безліч подібних моторів з різним числом обертів.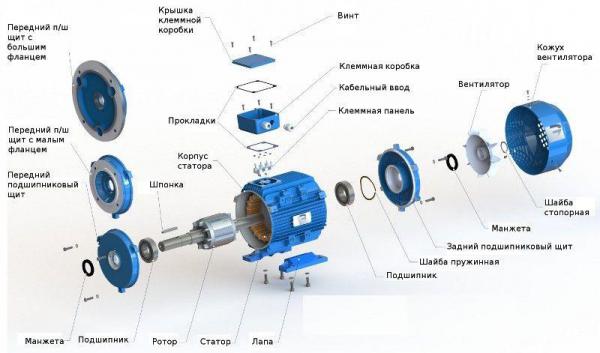 Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Двигуни постійного струму
Обговорюючи типи сучасних електродвигунів, прийнято починати з пристроїв постійного струму. Це складні пристрої, здатні видавати велику потужність і кількість обертів. За характером порушення вони поділяються на:
- незалежні;
- паралельні;
- послідовні;
- змішані.
У кожного типу є свої особливості і рекомендацію по застосуванню. Наприклад, двигуни з незалежним збудженням не можна запускати без навантаження. Дотримання правил експлуатації — гарантія стабільної та ефективної роботи двигуна постійного струму.
До основних переваг даних агрегатів відносять:
- екологічність і надійність;
- можливість застосування в ролі генератора;
- швидкий запуск, легке управління;
- компактні габарити і просту конструкцію.
Чим відрізняються електродвигуни цього типу від двигунів змінного струму? Основний момент — можливість плавного регулювання швидкості обертання (кількості оборотів) вала. Саме це визначає якість побутове та промислове застосування даних машин.
Електродвигуни змінного струму
Як ми вже говорили, електродвигуни змінного струму є найбільш затребуваними. Їх частіше можна зустріти як в побутових, так і в промислових умовах. Вони поділяються на синхронні та асинхронні, бувають однофазними і трифазними. Розглянемо кожен тип більш докладно.
Синхронні двигуни змінного струму
Почнемо з синхронних пристроїв. Число оборотів в хвилину їх ротора дорівнює частоті обертання МП. Це забезпечує стабільну швидкість двигунів даного типу. Застосування досить широко: компресори, насоси, генератори, вентилятори і т. д.
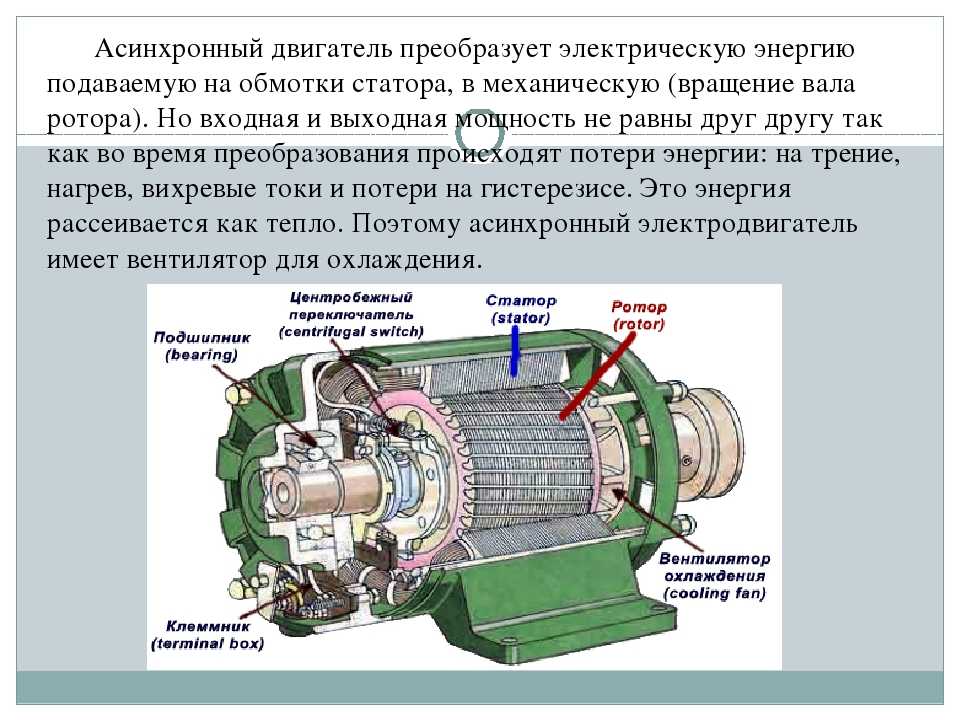
Особливості асинхронних електродвигунів
В асинхронних електродвигунах частота обертання магнітного поля не співпадає з кількістю оборотів в хвилину ротора. Існує два види подібних двигунів змінного струму: з короткозамкненою рухомою частиною і з фазною. В залежності від типу електроланцюга, асинхронні двигуни поділяються на однофазні і трифазні. Чим відрізняються? Перші частіше використовуються в побутових умовах, а другі актуальні для промислових об’єктів. Асинхронні електродвигуни АИР випускаються в обох варіантах. Ключові переваги:
Існує два види подібних двигунів змінного струму: з короткозамкненою рухомою частиною і з фазною. В залежності від типу електроланцюга, асинхронні двигуни поділяються на однофазні і трифазні. Чим відрізняються? Перші частіше використовуються в побутових умовах, а другі актуальні для промислових об’єктів. Асинхронні електродвигуни АИР випускаються в обох варіантах. Ключові переваги:
- універсальність до експлуатації;
- величезна різноманітність моделей;
- ремонтопридатність, надійність корпусу;
- невеликі габарити при високій потужності;
- низький рівень видаваного шуму;
- високий ККД і тривалий термін служби.
Вибираючи однофазні або трифазні асинхронні двигуни АИР, враховуйте особливості місця їх застосування. Ці промислові та побутові агрегати випускаються в різних кліматичних виконаннях. Тому вивчаючи їх характеристики, звертайте увагу не тільки на потужність і число обертів.
Однофазні та трифазні, синхронні і асинхронні, АИР або інших серій — електродвигуни застосовуються в побутовій і промисловій сфері, де полегшують працю людини і вирішують завдання, які без них нездійсненні.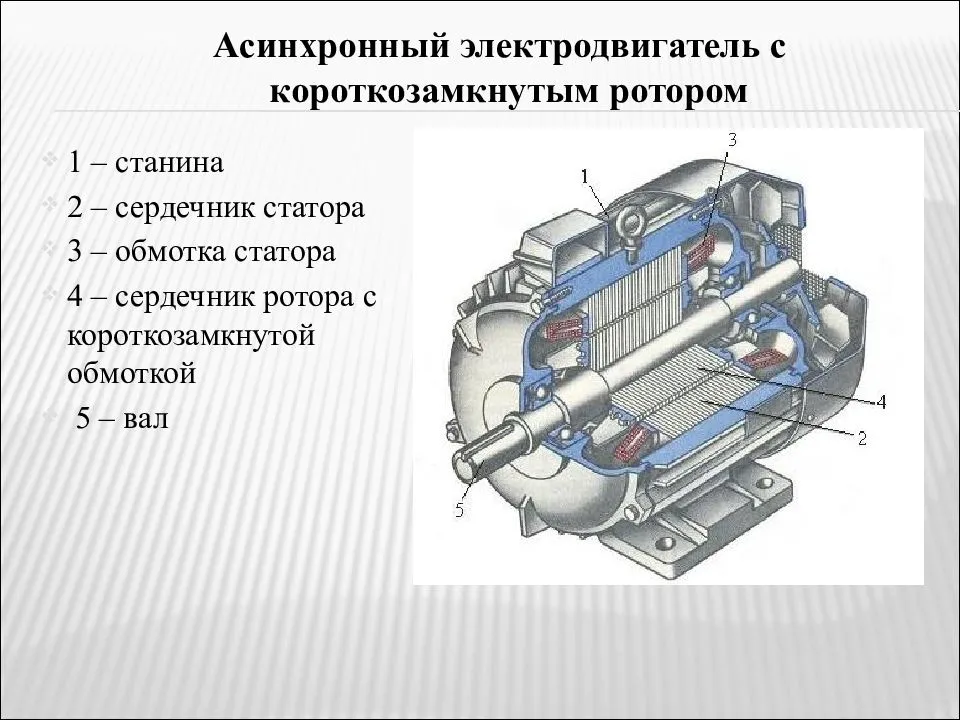
Какие бывают виды электродвигателей переменного тока
Содержание
- Выбор двигателя
- Асинхронные двигатели
- Синхронные двигатели
- Заключение
Как разработать двигательную установку? Для проектирования системы любого типа имеет значение кинематическая схема и эксплуатационные условия, указанные в задании. Записав требуемые технические данные, приступают к кинематическому расчету, который является исходным для силового и энергетического расчета, как отдельных механизмов, так и всей системы. Чтобы к установке правильно подобрать электрический двигатель надо понимать из чего можно выбрать. Поэтому ниже рассмотрим какими они бывают.
Выбор двигателя
Выбор электродвигателя того или иного типа осуществляется на основе технических расчетов, которые выполняются в установленной последовательности:
- расчет мощности и ориентировочный выбор агрегата;
- проверка мотора по пусковым параметрам, перегрузке и нагреву.
Требуемая мощность, скорость и другие параметры определяются на основании исходных данных – рабочих характеристик машины. Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
Значения КПД отдельных узлов кинематической цепи должны соответствовать приведенным данным справочных таблиц.
В зависимости от принципа работы существуют следующие типы электродвигателей:
- асинхронники,
- синхронники.
Любой тип может быть одно-, двух- или трёхфазным. Трехфазные моторы составляют около 70% двигательной техники в промышленности. Однофазные также очень широко применяются в индустрии и составляют около 10-15% моторов.
Асинхронные двигатели
В асинхронных агрегатах весь процесс опирается на небольшую разницу в скорости между магнитными полями статора и ротора, вызывающую ток в обмотке ротора. Расчет мощности и предварительный выбор мотора производится по эквивалентному моменту сопротивления и частоте. Асинхронные двигатели бывают с короткозамкнутым и фазным ротором, как показано на структурной схеме.
Все основные параметры (обмотка, пазы статора) асинхронного мотора имеют соответствующие соотношения. Определиться с выбором техники помогают предварительный и проверочный расчёт основных параметров.
Однофазные асинхронные моторы бывают бытового назначения, потребляемая мощность их обычно невелика. К ним относятся:
- вентиляторы,
- кондиционеры,
- стиральные машины,
- компрессоры холодильников,
- водяные насосы.
Трехфазные асинхронные двигатели используются там, где необходимо большое количество электроэнергии, например, в стартерах, гидравлических насосах. Приводы переменного тока становятся все популярнее с каждым годом.
Синхронные двигатели
Расчет начальных условий для синхронных двигателей здесь не особенно важен, потому что процесс эксплуатации не основан на скольжении и индукции. Синхронные двигатели бывают:
- с электромагнитным возбуждением;
- с постоянными магнитами;
- реактивные, гистерезисные.
Однофазные синхронные электродвигатели являются распространенными источниками питания для работы электрических часов и другого мелкого высокоточного оборудования. Они требуют применения некоторого вспомогательного метода, чтобы довести их до синхронной скорости, то есть, чтобы запустить их. Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Работа трехфазных синхронных электродвигателей при постоянной синхронной скорости чаще используется для работы в системах синхронизатора.
Электродвигатели переменного тока различаются в зависимости:
- от скорости работы – постоянной, переменной и регулируемой;
- от конструктивных особенностей, то есть могут быть открытыми, полузакрытыми, вентилируемыми и т.д.
Если говорить про другие виды электродвигателей переменного тока, выпускаемые современной промышленностью, то, несмотря на широкое разнообразие, все они относятся к механически коммутируемым машинам, в которых скорость зависит от напряжения и соединения обмоток.
Заключение
Электродвигатели и приводы широко применяются в различных сферах. Электромоторы переменного тока являются надёжными, недорогими, обладают хорошими эксплуатационными качествами. Низковольтные приводы переменного тока имеют прекрасную репутацию, а количество установленных и эксплуатируемых приводов исчисляется уже на сотни. Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Способ управления машинами с помощью привода обладает достоинствами с точки зрения экономии энергии и совершенствования технологических процессов.
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Посмотреть все СМИ
- Ключевые сотрудники:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Похожие темы:
- синхронный двигатель линейный двигатель реактивный двигатель вращательный двигатель Индукционный двигатель
См. всю связанную информацию →
электродвигатель
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением. Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что по обмоткам статора протекает набор трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени
На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени  Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Электричество: короткие замыкания и постоянные токи
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со временем изменения магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки. При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
При полной нагрузке скорость обычно на 0,5–5 % ниже рабочей скорости (часто называемой синхронной скоростью), при этом более высокий процент применяется к двигателям меньшего размера. Эту разницу в скорости часто называют скольжением.
Другие синхронные скорости можно получить с источником постоянной частоты, создав машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — число полюсов (которое должно быть четное число). Данную железную раму можно намотать для любого из нескольких возможных чисел пар полюсов, используя катушки, которые охватывают угол приблизительно (360/ р )°. Крутящий момент, доступный от корпуса машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, будучи произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
Электродвигатель | Определение, типы и факты
трехфазный асинхронный двигатель
Смотреть все СМИ
- Ключевые люди:
- Никола Тесла Томас Давенпорт Ипполит Фонтейн Майкл Фарадей
- Похожие темы:
- синхронный двигатель линейный двигатель реактивный двигатель вращательный двигатель Индукционный двигатель
См. всю связанную информацию →
электродвигатель , любой из классов устройств, преобразующих электрическую энергию в механическую, обычно с использованием электромагнитных явлений.
Большинство электродвигателей развивают свой механический крутящий момент за счет взаимодействия проводников, несущих ток, в направлении, перпендикулярном магнитному полю. Различные типы электродвигателей различаются способами расположения проводников и поля, а также управлением, которое может осуществляться над механическим выходным крутящим моментом, скоростью и положением.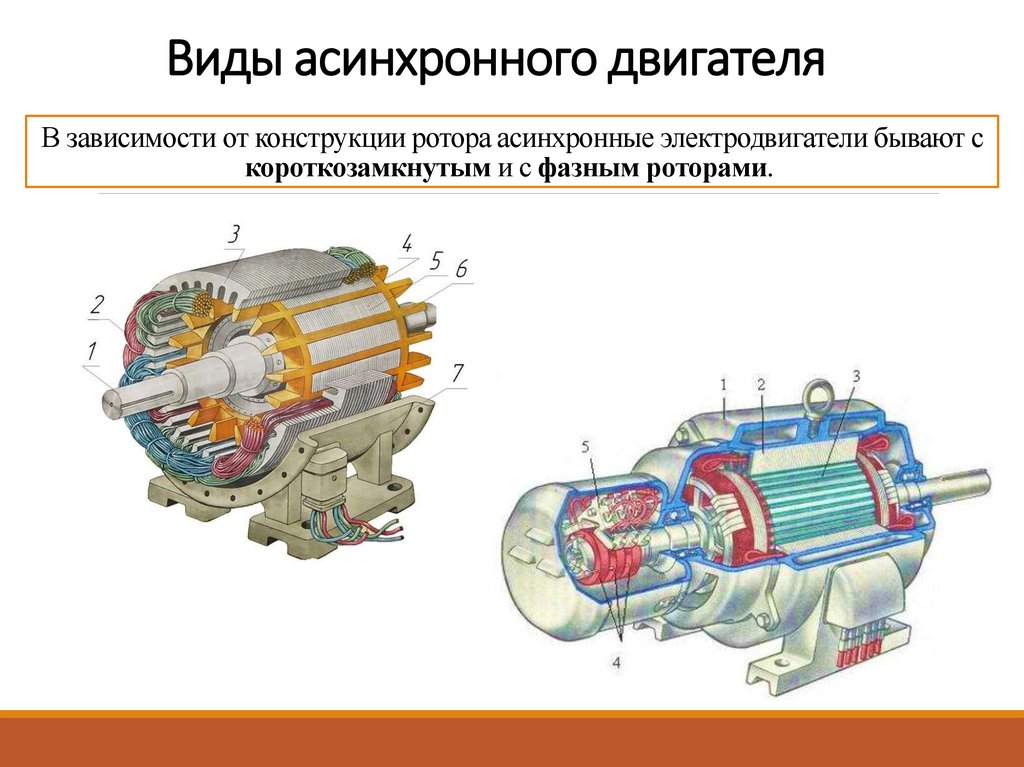 Большинство основных видов описаны ниже.
Большинство основных видов описаны ниже.
Простейший тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть соединены либо по схеме «звезда», обычно без внешнего соединения с нейтральной точкой, либо по схеме «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены друг с другом на каждом конце ротора проводящим концевым кольцом.
Основу работы асинхронного двигателя можно разработать, если сначала предположить, что обмотки статора подключены к трехфазному источнику электропитания и что по обмоткам статора протекает набор трех синусоидальных токов формы, показанной на рисунке. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Для простоты показана только центральная петля проводника для каждой фазной обмотки. В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени.
В данный момент t 1 на рисунке ток в фазе a является максимальным положительным, а в фазах b и c вдвое меньше отрицательного значения. Результатом является магнитное поле с примерно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. е. на одну шестую цикла позже) ток в фазе c максимален, а в обеих фазах b и фазы a имеют положительное значение половины значения. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60° против часовой стрелки. Изучение распределения тока для t 3 , t 4 , t 5 и t 5 и t 6 показывает, что магнитное поле продолжает вращаться во времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Поле совершает один оборот за один цикл токов статора. Таким образом, совместное действие трех равных синусоидальных токов, равномерно смещенных во времени и протекающих по трем равномерно смещенным по угловому положению статорным обмоткам, должно создавать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, зависящей от частоты электроснабжение.
Викторина «Британника»
Энергия и ископаемое топливо
Вращательное движение магнитного поля по отношению к проводникам ротора вызывает индуцирование в каждом из них напряжения, пропорционального величине и скорости поля относительно проводников. Поскольку проводники ротора замкнуты накоротко на каждом конце, эффект будет заключаться в том, что в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны наведенному напряжению, деленному на сопротивление проводника. Картина токов ротора на момент t 1 рисунка показан на этом рисунке.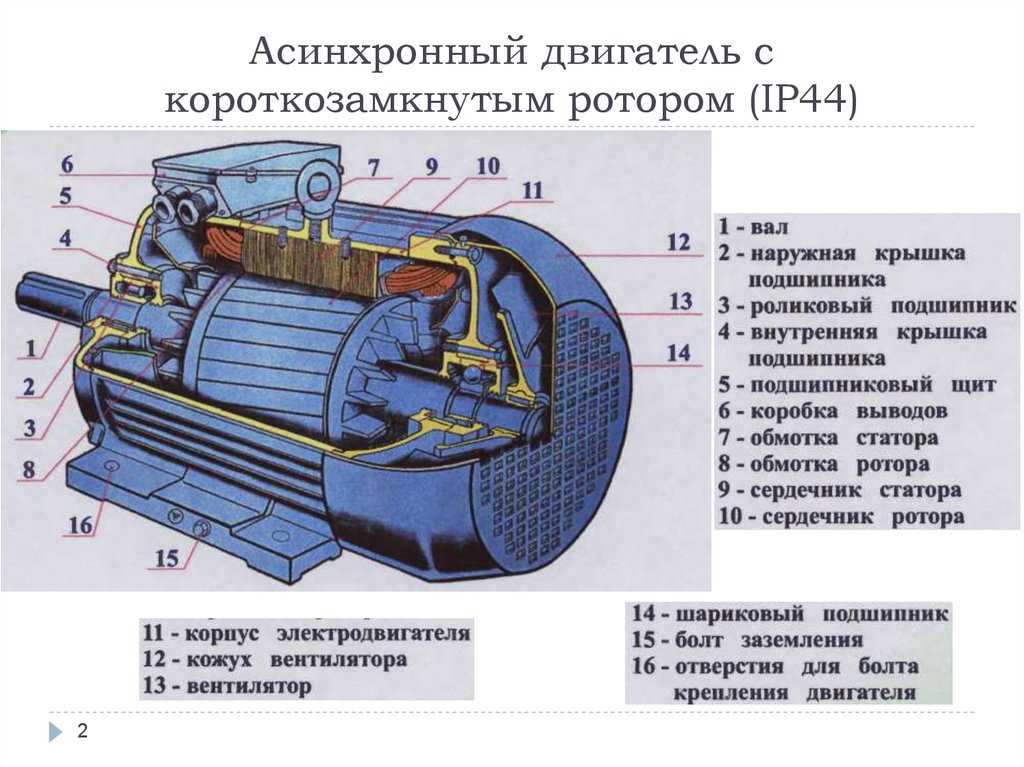 Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать крутящий момент против часовой стрелки на роторе (т. е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока проводника ротора и крутящего момента. Скорость ротора достигает устойчивого значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому при этой скорости нагрузкой, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, как раз достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить необходимую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Чтобы поддерживать это вращающееся поле при наличии токов ротора на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае возникло бы. токами ротора на рисунке. Тогда общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90°, чтобы обеспечить необходимую электрическую мощность. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть периода или 90°. При номинальной нагрузке эта составляющая намагничивания обычно находится в диапазоне от 0,4 до 0,6 величины составляющей мощности.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазной сети постоянного напряжения и постоянной частоты. Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
Типичное линейное напряжение питания находится в диапазоне от 230 вольт между фазами для двигателей относительно малой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для мощных двигателей мощностью примерно до 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласовано со временем изменения магнитного потока в статоре машины. Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. При частоте питания 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для крутящего момента нагрузки.