Мотор-редуктор и мотор-редукторы | SEW-EURODRIVE
Наша модульная система мотор-редукторов ориентируется на многообразие ваших сфер применения. Выберите для своего привода идеальный вариант из мотор-редукторов стандартного исполнения, для сервопривода, с вариатором, из нержавеющей стали или взрывозащищенных.
Что такое мотор-редуктор?
Мотор-редуктор Мотор-редукторМотор-редуктор – это единый компактный узел, состоящий из редуктора и двигателя. В электроприводной технике, изготавливаемой компанией SEW-EURODRIVE, двигатель всегда электрический. Идея „агрегата из двигателя и редуктора“ восходит к патенту конструктора и предпринимателя Альберта Обермозера из г. Брухзаль от 1928 года: он изобрел так называемый „двигатель с промежуточной передачей“.
С тех пор мотор-редукторы постоянно совершенствовались, были изобретены новые типы редукторов.
Как работает мотор-редуктор?
Главным компонентом мотор-редуктора является редуктор с его ступенями – парами зубчатых колес. Они передают усилие двигателя от входной стороны к выходной. Таким образом, редуктор работает как преобразователь вращающего момента и частоты вращения.
В большинстве случаев применения редуктор замедляет скорость вращения двигателя, а вращающий момент при этом становится значительно больше, чем у электродвигателя без редуктора. Поэтому от конструкции редуктора зависит, будет ли мотор-редуктор использоваться для малых, средних или тяжелых нагрузок, для коротких или долгих периодов включенного состояния.
В зависимости от того, уменьшает или увеличивает редуктор частоту вращения двигателя (т. е. частоту вращения на входе), говорят о понижающем или повышающем редукторе.
Еще одним важным параметром мотор-редуктора является максимальный вращающий момент на выходном валу. Он указывается в ньютон-метрах (Нм) и является мерой усилия мотор-редуктора и нагрузки, которую он может привести в движение этим усилием.
Какие типы мотор-редукторов существуют?
Тип мотор-редуктора определяется прежде всего направлением передачи усилия в редукторе. При этом различают три основных варианта конструкции: редуктор с параллельными валами, угловой редуктор и планетарный редуктор.
Где применяются мотор-редукторы?
Возможности применения мотор-редукторов чрезвычайно разнообразны. Без мотор-редукторов остановились бы целые отрасли экономики по всему миру. Так, в промышленном производстве они приводят в движение бесчисленные конвейерные линии, поднимают и опускают грузы и перемещают самые разные товары в различных системах транспортировки из пункта А в пункт Б.
Вот лишь малая доля возможных применений:
В автомобилестроении мотор-редукторы можно встретить на каждом этапе производства от штамповки кузовных деталей до окончательной сборки. А в производстве безалкогольных напитков они перемещают бутылки, упаковки и ящики, а также применяются при розливе напитков или сортировке пустой тары. Вся внутренняя логистика производственных предприятий полностью зависит от приводов, будь то складирование, сортировка или выдача товара.
Также и в аэропортах без мотор-редукторов ничего бы уже не двигалось, и пассажиры напрасно ждали бы своего багажа в зоне выдачи.
Манипуляторы и роботы, для которых очень важна высокая динамика и точность движений, были бы немыслимы без мотор-редукторов для сервопривода.
И последнее, но не менее важное: совсем не было бы некоторых аттракционов в индустрии развлечений, и мы, наверное, не знали бы, как захватывает дух на американских горках.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25Ключ
-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
- 12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
22
-
23
-
24
-
25
Мотор-редукторы из модульной системы SEW-EURODRIVE
Как и сферы применения наших мотор-редукторов, столь же разнообразны и широки возможности их комбинирования. Благодаря разработанной в SEW-EURODRIVE универсальной модульной системе наши клиенты могут использовать миллионы вариантов и найти индивидуальное техническое решение для любых задач. При этом цель модульной системы – суметь из минимального числа компонентов составить максимальное многообразие конечных продуктов.
Благодаря разработанной в SEW-EURODRIVE универсальной модульной системе наши клиенты могут использовать миллионы вариантов и найти индивидуальное техническое решение для любых задач. При этом цель модульной системы – суметь из минимального числа компонентов составить максимальное многообразие конечных продуктов.
Мотор-редукторы SEW-EURODRIVE делятся на следующие категории: стандартные мотор-редукторы, мотор-редукторы для сервопривода, мотор-редукторы для троллейного привода, мотор-редукторы с вариатором, мотор-редукторы из нержавеющей стали и взрывозащищенные мотор-редукторы.
Стандартные мотор-редукторы:
Стандартные мотор-редукторыСтандартные мотор-редукторы отличаются разнообразием конструкций, оптимальной градацией множества типоразмеров и самыми разными исполнениями. Это делает их незаменимыми и надежными приводами, особенно в сфере производства и логистики. В зависимости от количества типоразмеров редукторов возможны вращающие моменты до 50 000 Нм.
Мотор-редукторы для сервопривода:
Сила, динамика и точность. Это основные особенности мотор-редукторов для сервопривода. Наша модульная система и в этом случае является ключом к широким возможностям комбинирования и позволяет реализовать в этом сегменте самые разнообразные конфигурации из редукторов и двигателей. Поскольку для любой задачи можно подобрать идеальный вариант мотор-редуктора.
Какой бы ни была конфигурация сервопривода из наших планетарных редукторов PF.. или цилиндрических редукторов BF.. в сочетании с синхронными серводвигателями CMP, асинхронными серводвигателями типа DRL.. или с асинхронными двигателями DR..: Всякий раз специальная согласованность двигателя и редуктора дает вам именно те характеристики привода, которые идеально подходят к вашей системе и ее задачам.
Наши редукторы стандартной категории тоже позволяют вам создавать разнообразные комбинации с нашими серводвигателями, чтобы вполне индивидуально компоновать и оптимизировать свою приводную систему.
Мотор-редукторы с вариатором:
Для таких систем, где частота вращения привода должна регулироваться плавно, применяются наши механические мотор-редукторы с вариатором. Такие требования характерны, например, для простых ленточных конвейеров или мешалок, скорость которых должна постоянно адаптироваться к различным производственным процессам. При этом скорость регулируется бесступенчато с помощью либо маховичка, либо устройства дистанционного регулирования.
Мотор-редукторы из нержавеющей стали:
Если привод применяется в гигиенических зонах с высокими требованиями к чистоте, мотор-редуктор должен выдерживать воздействие химикатов и влаги. Для этих целей разработаны наши мотор-редукторы из нержавеющей стали, устойчивые к воздействию кислот и щелочей. Кроме того, их оптимизированная для очистки поверхность и отсутствие крыльчатки на дают грязи скапливаться в углублениях. Что же касается мощности, то никаких компромиссов от вас не потребуется.
Взрывозащищенные мотор-редукторы:
Большинство наших стандартных и сервоприводных мотор-редукторов при соблюдении местных нормативов доступны по всему миру как взрывозащищенные мотор-редукторы. Это мощные и безопасные приводы, которые обеспечивают вам необходимую высокую производительность даже во взрывоопасных средах с воздушно-газовыми или воздушно-пылевыми смесями.
Мотор — снято: «Лады» остались без мощного агрегата | Статьи
«АвтоВАЗ» официально прекратил продажи Lada Vesta с мотором 1,8 л. Из-за низкого спроса его производство вообще может оказаться экономически нецелосообразным. Есть ли у российского агрегата будущее и почему он важен для «Лады» — в материале «Известий».
«АвтоВАЗ» убрал из прайс-листов «Весты» версии с самым мощным мотором — бензиновым 1,8 л (122 л.с.). Ранее этого агрегата лишили Xray.
Слабая доля
Представители российского автогиганта рассказали, что «Весты» с мотором 1,8 не выпускают уже с ноября 2020 года. Получается всё это время дилеры распродавали остатки машин. Представитель автозавода подчеркнул, что мотор 1,8 остается на приподнятых Cross версиях Xray и Vesta. Кроме того, его форсированной версией продолжат оснащать седаны Vesta Sport.
Причина сокращения вариантов с мотором 1,8 в низком спросе. За прошлый год «Веста» с этим силовым агрегатом разошлась тиражом 12 058 экземпляров — это всего 11,2% от общего числа проданных машин (10 7281 шт.). У Lada Xray ситуация получше — 4494 машины, или 23% от общего числа (19 286 шт.).
Кросс-продажи
В основном двигатель 1,8 выбирали покупатели внедорожных версий Cross. Например, 2020 году на 10 725 приподнятых «Вест» пришлось только 882 обычных и 451 «заряженная» Vesta Sport. За то же время купили 4183 кроссовера Xray Cross и только 311 обычных «Иксреев». Вот по этой причине «АвтоВАЗ» и решил уменьшить разнообразие модельного ряда.
За то же время купили 4183 кроссовера Xray Cross и только 311 обычных «Иксреев». Вот по этой причине «АвтоВАЗ» и решил уменьшить разнообразие модельного ряда.
У версий Cross хуже аэродинамика, большие 17-дюймовые колеса, поэтому им нужен самый мощный мотор из имеющихся. В то же время показатели двигателя 1,8 по современным меркам скромные: 122 л.с. и 170 Нм момента. В форсированном варианте для Vesta Sport удалось добиться 145 л.с. и 184 Нм момента — результат скорее гражданский нежели спортивный. Так что динамические характеристики автомобилей с мотором 1,8 можно назвать приемлемыми за неимением лучшего.
Кроссовер Lada Xray
Фото: ТАСС/Сергей Коньков
Бесславный робот
Кроме того, мотору 1,8 л не хватает современного автомата. Имеющийся «робот» АМТ с одним сцеплением по плавности переключения передач ощутимо проигрывает другим автоматическим трансмиссиям. Несмотря на то, что инженеры «АвтоВАЗа» постоянно улучшают АМТ — очередная версия умеет переключать передачи значительно быстрее и вдобавок снабжена снежным режимом — популярностью эта коробка не пользуется.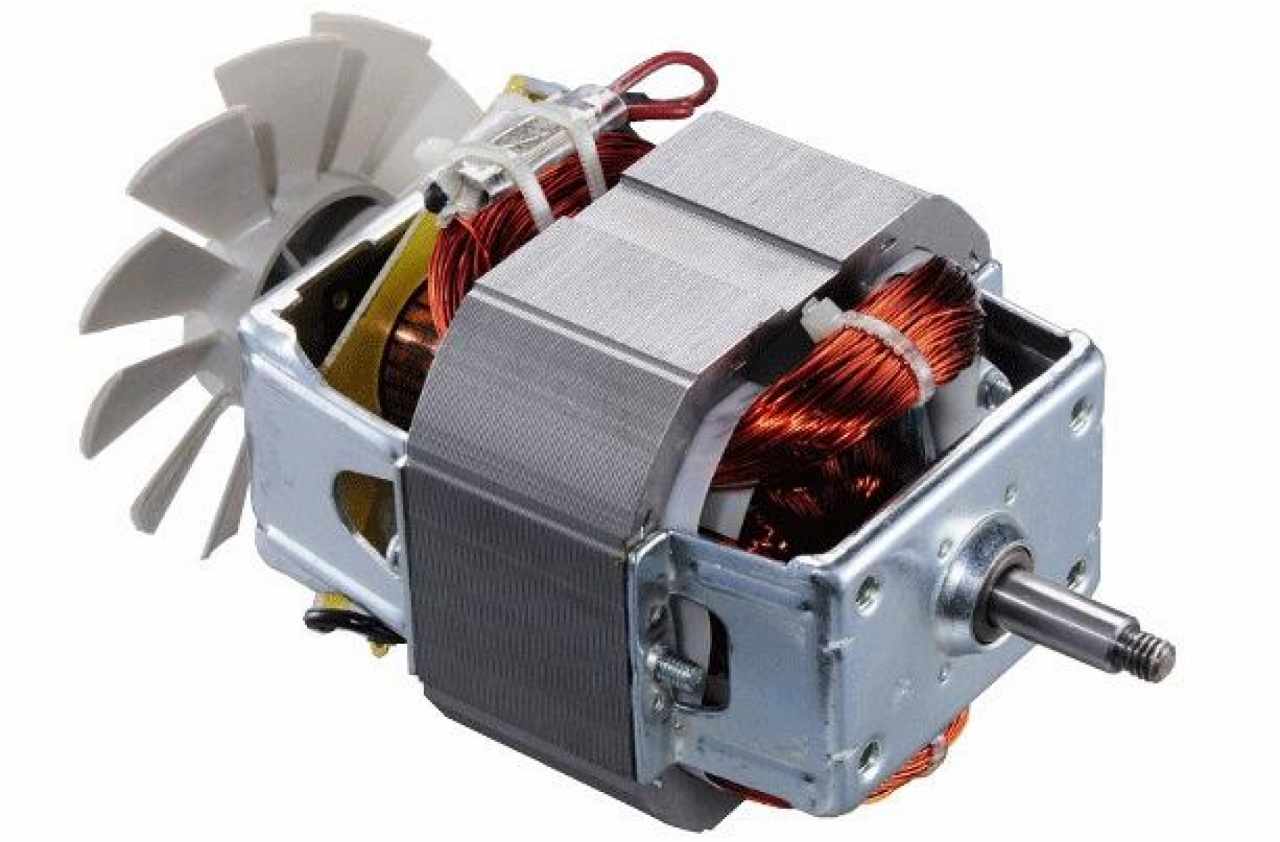 Даже несмотря на то, что доплата за нее невысока.
Даже несмотря на то, что доплата за нее невысока.
У «Весты» и Xray доля AMT в общих продажах машин с мотором 1,8 была в районе 7%. Только с появлением вариатора в паре с агрегатом h5M (113 л.с. и 152 Нм) альянса Renault–Nissan спрос на Lada с автоматическими трансмиссиями начал расти. Несмотря на меньшую мощность иностранного агрегата, вариаторные машины оказались не только плавнее в разгоне, но и чуть динамичнее при схожем расходе.
«Если бы было принципиальное различие в мощности, например, мотор 1,8 развивал 140 л.с, был бы спрос. А так разница в мощности между моторами невелика, и смысла покупать 122-сильный нет совсем», — считает автоэксперт Игорь Моржаретто.
Надежен, но
Мотор ВАЗ-21179 объемом 1,8 л создавался для Lada C, предшественника «Весты», которая разрабатывалась совместно с канадской Magna, но так и не стала серийной. Это первый мотор «АвтоВАЗа», оснащенный системой регулировки фаз газораспределения. Особенности конструкции и использование импортных комплектующих должно было обеспечить надежность и ресурс в районе 400 тыс. км.
км.
На деле же получился повышенный расход масла и «детские» болезни. Например, топливный шланг у части машин перетирался о хомут проводки, что могло привести к пожару. В октябре прошлого года по этой причине было отозвано более 90 тыс. машин. Затем мотор получил новую головку блока цилиндров, конструкция которой позволила победить масложор.
Между тем, перспективы мотора туманны. За первый квартал этого года доля «Вест» с мотором 1,8 упала вдвое до 1336 штук, а доля 122-сильного Xray просела до 18,3%. Низкий спрос может привести к тому, что выпуск российского силового агрегата окажется нецелесообразным. Под вопросом и модель Xray. Вариатор, которым оснащается Xray Cross, на нее установить невозможно, пришлось бы серьезно переделывать автомобиль, а недавно появившийся на версии с мотором 1,6 «робот» — замена сомнительная.
Двигатель автомобиля LADA Niva Travel
Фото: РИА Новости/Алексей Даничев
Золотая «Нива»
Мотор 1,8 мог бы заменить древний и маломощный агрегат «Нивы», и ходили слухи, что он пропишется под капотом тольяттинского внедорожника. Однако эксперимент с Chevrolet Niva FAM-1, оснащавшейся опелевским силовым агрегатом того же объема, показал, что нивовская трансмиссия работает на пределе и требует доработок, а они в итоге не лучшим образом отразятся на цене внедорожника.
Однако эксперимент с Chevrolet Niva FAM-1, оснащавшейся опелевским силовым агрегатом того же объема, показал, что нивовская трансмиссия работает на пределе и требует доработок, а они в итоге не лучшим образом отразятся на цене внедорожника.
«Люди пишут: разве трудно «АвтоВАЗу» новый мотор поставить, вон, умельцы же делают. Умелец делает для себя, а затем лежит под этим мотором. Одно дело, когда ты сделал две машины, а другое — когда выпускаешь на рынок машину, обеспеченную гарантией, запчастями. Чтобы приставить новую коробку к мотору, мало сделать переходник, нужно провести полный цикл испытаний по расходу топлива, по надежности, подобрать передаточный ряд, калибровки по экологии», — рассказал «Известиям» главный редактор «За рулем» Максим Кадаков.
Вторая попытка
Определенная угроза российскому мотору исходит и от плана Renaulution, новой стратегии Группы Renault. Он подразумевает сокращение платформ и кузовов марки Lada, унификацию силовых агрегатов. Новые Granta и Niva создаются на общей с новыми «Логаном» и «Дастером» платформой CMF-B.
Впрочем, по информации «Авторевю», во французском плане нашлось место для российского мотора 1,8. Его модернизированная версия, где, в частности, появится второй фазовращатель, а мощность вырастет до 135 л.с., появится под капотом новой «Нивы». Впрочем, есть шанс, что он дебютирует раньше 2024 года, на рестайлинговой «Весте». И вполне возможно, со второй попытки этот двигатель получит признание.
Автомобильный завод LADA в Ижевске
Фото: ТАСС/Алена Селезнева
«Какое-то будущее у вазовских моторов есть, у существующих либо их модернизированных версий. Вполне очевидный вариант разведения машин, например, «Нивы» и «Дастера» — это моторная гамма. Какая-то дистанция между ними должна быть. Если использовать российский мотор, то он будет дешевле турбомотора на будущем «Дастере». Другое дело, что всё завязано на объемы производства. По некоторым вопросам трудно предсказать, что будет в 2024 году, и многие решения будут зависеть от конъюнктуры спроса. Вполне возможно, покупателей «Нивы» устроит вазовский мотор из-за цены», — предположил Максим Кадаков.
Вполне возможно, покупателей «Нивы» устроит вазовский мотор из-за цены», — предположил Максим Кадаков.
Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
- Коллекторные/Brushed (др. названия: DC)/Сoreless.
- Бесколлекторные/Brushless.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.

Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения).
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя.
 Поэтому чем сопротивление меньше — тем лучше.
Поэтому чем сопротивление меньше — тем лучше.
Мотор — что это такое
Двигатель — это сердце автомобиля!
Двигатель или мотор представляет собой устройство, которое преобразовывает энергию топлива в механическую.
Так же как и нашему сердцу нужна кровь, мотору нужно топливо в виде топливо-воздушной смеси, которую обеспечивает топливная система.
Что важнее кузов или мотор сказать сложно. Одно без другого — просто груда металла.
Мотор — важнейшим компонент автомобиля, который приводит его в движение. Механическая энергия, которую он производит, передается при помощи трансмиссии на колеса. Ее конструкция вкупе с конструкцией мотора называют силовой установкой.
Основные виды мотора:
- электродвигатели,
- внутреннего сгорания, или ДВС,
- гибридные, комбинированные двигатели.
Безусловно, самым популярным и распространенным из них является ДВС, который работает благодаря топливу.
В свою очередь, среди ДВС выделяют следующие типы:
- роторно-поршневой,
- поршневой мотор,
- газотурбинный
Большинство автомобилей оснащены поршневыми ДВС, работающие при помощи дизельного топлива, бензина или природного газа. Таким двигателям требуется система смазки и система охлаждения. Для каждого конкретного двигателя требуется определенное моторное масло с заданными параметрами, по научному — допусками.
В последнее время также наблюдается тенденция востребованности электродвигателей, т.к. он экономичен и экологичен.
Работает такой двигатель за счет электроэнергии, но есть у этих устройств и недостаток — маленькая емкость батареи.
Гибридные моторы — новейшая разработка. Она состоит из ДВС и электродвигателя. Оба компоненты связываются друг с другом генератором, а энергия передается параллельно или последовательно на колеса.
Назад
Назван лучший автомобильный мотор в России
МОСКВА, 5 фев — ПРАЙМ. Автомобильный двигатель, разработанный в рамках проекта «Кортеж» для семейства автомобилей правительственного класса Aurus, является лучшей силовой установкой для машин, созданной в России, – именно поэтому её решили взять за основу нового авиамотора, заявил в интервью РИА Новости генеральный директор Центрального института авиационного моторостроения (ЦИАМ) имени П.И. Баранова Михаил Гордин.
«Можно только похвалить НАМИ (Научно-исследовательский автомобильный и автомоторный институт) и Минпромторг России, обеспечивших освоение современных технологий создания автомобильного двигателя. Ведь почему для проекта конверсии выбрали двигатель «Кортежа»? Да потому что он лучший из всех, что производятся в нашей стране», — сказал он.
Aurus планирует выпуск автомобилей на водороде
Ученый отметил, что осенью 2020 года специалисты ЦИАМ испытали данную двигательную установку в термобарокамере, посмотрели, как она работает на высоте. В этом году двигатель будут «примерять» на самолет. В качестве платформы на данном этапе испытаний могут быть использованы Як-18Т и Як-52.
В качестве платформы на данном этапе испытаний могут быть использованы Як-18Т и Як-52.
«У нас пока нет задачи полететь, планируем сделать пробежки, посмотреть вибрации. Перед первым полетом нужно провести большой комплекс испытаний. Это целая история – чтобы двигатель стал авиационным, серийным», — пояснил Гордин.
Ранее директор ЦИАМ заявлял РИА Новости о проведении в России научно-исследовательских работ в области превращения автомобильного двигателя от проекта «Кортеж» в авиационный. По его словам, основная цель данного проекта – понять, что конкретно нужно поменять в автомобильном двигателе, чтобы на нем полетел самолет.
Эксперт объяснила, почему беременные не дождутся новых пособий
По словам Гордина, автомобильные двигатели — крупносерийные, их себестоимость существенно ниже, поэтому есть возможность сделать относительно дешевый авиационный двигатель.
В рамках проекта «Кортеж» ФГУП НАМИ совместно с Porsche Engineering разработало семейство модульных двигателей. Самым мощным из них является V12 с четырьмя турбинами, непосредственным впрыском топлива и системой изменения фаз газораспределения.
Двигатель наизнанку. Южноуральские ученые разрабатывают «мотор» для многоразовой ракеты будущего
Прорывная разработка произвела фурор на прошедшей в Челябинске Всероссийской научно-технической конференции «Динамика теплофизических процессов двигателей, энергетических установок и импульсных систем».
Что новый двигатель внешнего расширения даст для создания многоразовой ракеты и поможет ли продвинуть освоение космоса? Об этом мы беседуем с одним из авторов проекта, инженером Государственного ракетного центра им. академика В.П. Макеева Андреем Естехиным.
Российский «шаттл»
— Что собой представляет проект «Корона»?
— Это проект создания ракеты-носителя многоразового использования. Сегодня полезный груз в космос выводят одноразовые ракеты, ступени которых отделяются по мере выхода на орбиту, а приземляется с помощью парашютной системы лишь спускаемый аппарат. Корпус, двигатели, рули управления, топливные баки сгорают в атмосфере, делая космический запуск очень дорогим.
Ученые уже давно задумываются над тем, как уменьшить затраты на космические запуски. Наиболее приемлемый вариант — это возвращаемые ракеты-носители. Даже частичное возвращение первой ступени существенно удешевляет взлет, а мы предлагаем сохранять всю ракету. «Корона» должна будет выходить в космос в автоматическом варианте, по сути, это роботизированный комплекс с интеллектуальным программным обеспечением системы управления.
— Подобные попытки предпринимались и раньше?
— Идею многоразовости носителей пытались реализовать еще в прошлом веке в рамках американского проекта SpaceShuttle и советского «Энергия-Буран». Была и другая российская разработка — проект «Россиянка» нашего ГРЦ. Это двуступенчатая ракетная система, в которой первая ступень многоразовая. В 2011 году разработчики представили «Россиянку» на конкурсе «Роскосмоса», но тогда отдали предпочтение проекту «Байкал-Ангара» ГКНПЦ им. Хруничева. У «Байкала» первая ступень должна была возвращаться в самолетном варианте. Планировалось, что после вывода на заданную высоту у нее будет открываться специальное крыло, чтобы выпускаемая ступень садилась на аэродром при помощи шасси. Но и этот дорогостоящий проект не был доведен до конца.
А в наше время повторное использование первой ступени отрабатывается Илоном Маском для ракет SpaceX Falcon 9. SpaceX уже осуществил ряд успешных посадок, но большой минус этой системы в том, что возвращается только одна ступень и такую ракету приходится вновь собирать после каждого полета.
Для ракеты-носителя «Корона» рассматривается и вариант с применением многопусковых схем. При этом одновременно запускаются две ракеты. Вторая только с топливом на борту, набрав высоту, перекачивает его в первую. Ракета-дубль предназначена для выведения полезного груза, большей массой, чем для «одиночки».
В нашей разработке, ракете-носителе «Корона», в отличие от американской нет отделяемых ступеней. Фактически это многоразовый автоматический космический корабль, что приближает мечту о дальних межпланетных полетах. Пока предполагается, что это будет многоразовая ракета-носитель для доставки на орбиту грузов, а когда она станет по-настоящему надежной, то и космонавтов.
На «внешней тяге»
— Но для такой ракеты нужна и особая тяговая сила. Чем «сердце» вашей «Короны» отличается от существующих маршевых двигателей?
— Проектируемый двигатель имеет сопло внешнего расширения с центральным телом. Двигатели такого типа как бы вывернуты наизнанку: сопло находится снаружи, а агрегаты внутри.
Их особенность в том, что струя продуктов сгорания при расширении взаимодействует с окружающей средой, подстраиваясь под наружное давление. При классической схеме сопло Лаваля работает без потерь лишь при одной величине наружного давления. Между тем при наборе высоты оно падает, поэтому сегодня используют многоступенчатые ракеты-носители, ступени которых отделяются в ходе взлета ракеты.
А потери нашего двигателя не зависят от давления воздуха. Отсюда и большее «кпд двигателя» (удельный импульс) на протяжении всего полета. Как показало компьютерное моделирование его работы, потери при этом минимальные.
— Были ли у вашего двигателя свои предшественники?
— Подобными двигателями занимались американцы в 60-х годах прошлого века. Так, в 1965 году компания Rocketdyne разрабатывала двигатель J-2T-200k c системой внешнего расширения «центрального тела», а через два года — AMPS-1 c высоким пустотным удельным импульсом. А в 1990-х американцы в рамках проекта VentureStar пытались создать линейный двигатель внешнего расширения для многоразового космического корабля-космолета, но проект был заморожен из-за технологических и финансовых проблем.
Подобные двигатели в начале 1990-х в США пытались разработать для одноступенчатой ракеты «Дельта-клиппер» и даже испытали опытный образец, но этот проект был, к сожалению, закрыт. Правда, в последнее время за рубежом серьезно продвинулись в этом направлении. К примеру, австралийская компания Amaero недавно провела успешные испытания ракетного двигателя внешнего расширения, детали которого «напечатаны» на 3D-принтере. Уже изготовила и испытывает экспериментальный образец такого двигателя и фирма ARCA.
Разработки по созданию одноступенчатых многоразовых ракет для космического туризма ведет и BlueOrigin. В мае 2019 года она вошла в список компаний, отобранных НАСА для создания прототипов космических аппаратов для высадки на Луну.
Чтобы не отстать от Запада, нужно расширять финансирование разработки отечественных аналогов многоразовых ракет. И наш двигатель наизнанку, и в целом проект «Корона», на мой взгляд, сможет помочь обойти зарубежных конкурентов.
Броня для супермотора
— Такой двигатель должен выдерживать колоссальные нагрузки и космические температуры?
— Это так. Но мы предусмотрели их и приняли защитные меры. Для изготовления центрального тела инновационного двигателя планируется использовать особо прочный и термостойкий материал — углестеклокомпозит, способный выдерживать температуру до 700 градусов по Цельсию. А часть конструкции и трубопроводы будут из углепластика с использованием новейших теплоизоляционных материалов.
Другое новшество в том, что центральное тело двигателя будет без системы охлаждения, не как при классической схеме. Изюминка в том, что современные материалы в процессе сгорания топлива обеспечат надежную защиту от нагрева. Для этого рассматриваются два варианта материалов — углеродно-композитный и на основе керамики. По расчетам, они обеспечат надежную работу двигателя при температуре более двух тысяч кельвинов!
— А какое топливо планируете применять?
– Мы предлагаем использовать высокоэффективный жидкостный реактивный двигатель, работающий на жидких водороде и кислороде.
Беспилотный челнок
— Видимо, для такого двигателя нужна и особая обтекаемая форма ракеты?
— Мы учли это и изучаем несколько вариантов конструкции. Вообще форма корпуса этой ракеты должна обеспечивать большую маневренность на участке спуска. Также исследуется влияние формы кормовой части на характеристики двигателя на участке выведения. Форма кормовой части «обратный конус» позволяет спрятать взлетно-посадочные амортизаторы от воздействия набегающего потока на участке спуска, но при этом за «кормой» возникает циркулирующая воздушная зона, которая создает дополнительное аэродинамическое сопротивление. У ракеты с закругленной формой кормовой части дополнительного сопротивления не возникает, но появляются проблемы с размещением амортизаторов. Мы работаем над конструкторским решением этих проблем.
— Где многоразовые ракеты могут найти применение?
— На мой взгляд, их можно будет использовать в качестве «челноков» для беспилотной доставки на орбиту модулей космической станции. За счет удешевления стоимости полетов затраты уменьшатся в разы. Кроме того, в перспективе на орбите можно будет, как из конструктора, собирать из модульных элементов защитные комплексы для борьбы с космическим мусором, астероидами и даже космические корабли для полетов к Луне, Марсу и другим планетам.
Двигатели для садовой техники — ROZETKA
Двигатели: классификация и разновидности
Двигатели представляют собой центральный рабочий орган огромного количества технических приспособлений. От их качества во многом зависит работоспособность мотоблоков, культиваторов и многой другой садовой техники.
Данные конструкции просто обязаны быть прочными, надежными и долговечными. Они должны выдерживать длительную эксплуатацию и работать без малейших сбоев в функционировании.
Условно все моторы можно определить на две большие категории: дизельные и бензиновые модели. Дизельные двигатели отличаются повышенной экономичностью. Стоимость дизельного топлива гораздо ниже, чем бензинового. Такие аппараты имеют повышенную тягу на низких скоростях. Это означает, что модели, работающие на бензине, зачастую оказываются не такими мощными, как устройства на дизеле. Перепады температуры для таких конструкций также не вызывают неприятностей. Двигатель может функционировать при повышенном температурном режиме без затруднений. Такие устройства часто используются для садовой техники, которая используется в условиях усложненной эксплуатации.
Бензиновые двигатели при эксплуатации обходятся немного дороже дизельных моделей. Они характеризуются повышенной надежностью и прочностью. Такие устройства помогают транспортному средству развивать повышенную скорость. Многие производители стараются улучшать модельный ряд данных товаров, дополняя созданные моторы новыми полезными функциями. Например, на большинстве моделей присутствуют специальные датчики, помогающие контролировать уровень масла. Двигатель мотоблока, работающий на бензине, пользуются популярностей среди современных потребителей.
По типу запуска моторы также делятся на несколько характерных подгрупп. Классификация данных устройств представлена следующим образом:
- Комбинированный (ручной/электро). Считается самой надежной категорией запуска моторов. Устройство может приходить в действие как благодаря одному повороту ключа, так и с помощью традиционного запуска. Надежность комбинированных моделей обусловлена возможностью выполнения запуска вручную в отсутствие возможности сделать это с помощью электросистемы.
- Ручной. Чаще всего такой тип запуска характерен для двигателей небольшого уровня мощности – в пределах десяти лошадиных сил. Таким образом запускаются достаточно устаревшие модели, отличающиеся невысокой стоимостью.
- Электрический. Такие моторы принято устанавливать на современные модели. Отличаются высокой простотой запуска. Для того, чтобы привести двигатель в действие, потребуется просто повернуть ключ в системе зажигания. Электрический запуск является одним из главных преимуществ при выборе мотора.
Как выбрать двигатель
Прежде, чем остановить выбор на определенной модели мотора, стоит определить, какие бывают двигатели. Для этого нужно обратить внимание на вышеуказанную классификацию и определиться с оптимальным вариантом.
Не меньшего внимания заслуживает и производитель указанного оборудования. Для того, чтобы выбрать самый качественный аппарат, потребуется присмотреться к модельным рядам популярных концернов. Представленная в них техника характеризуется прочностью и долговечностью.
Одной из главных характеристик таких устройств является объем двигателя. Его необходимо рассчитывать исходя из индивидуальных особенностей техники, на которую будет установлен аппарат. Мощность мотора должна соответствовать основным требованиям техники, на которую он будет установлен. Чтобы определить качество функционирования выбранной модели, следует внимательно изучить отзывы предыдущих покупателей. Так можно узнать обо всех преимуществах и недостатках каждого мотора.
Перед приобретением требуется проверить совместимость двигателя с конкретной моделью садовой техники. Для этого необходимо прочитать техническую информацию от производителя и определиться с требуемыми характеристиками мотора. Это поможет выбрать самый оптимальный вариант для конкретной техники, тем самым обеспечивая ее нормальную работоспособность.
Что такое мотор? | Сервоприводы и контроллеры машин | Продукты и решения
Что такое мотор?
Словарь описывает: «Двигатель — это машина, преобразующая электрическую энергию в механическую». Другими словами, электрическая энергия — это «батарея», а механическая энергия — это «вращение». Для физического объяснения мотора хорошо подходит хорошо известное «правило левой руки Флеминга». Когда электрический ток течет по электрическому проводу, помещенному между двумя магнитами, обращенными друг к другу, он создает силу.Электрический ток, магнитное поле и движение соответственно применяются в перпендикулярных направлениях друг к другу, как когда вы разводите средний палец (электрический ток), указательный палец (магнитное поле) и большой палец (сила) левой руки соответственно к взаимно ортогональным осям.
Тогда почему электрический ток, протекающий по электрическому проводу, создает силу? Это связано с тем, что, когда электрический ток течет по электрическому проводу, вокруг него создается магнитное поле. Магнитное поле притягивает или отталкивает магнитное поле от магнитов, которые создают силу для перемещения электрического провода.Электрическая энергия здесь — это «электрический ток», а механическая энергия — это «сила».
Начало моторов
В 1831 году британский физик Майкл Фарадей открыл закон электромагнитной индукции, согласно которому электрический ток течет при перемещении магнитов в катушке с воздушным сердечником. Закон электромагнитной индукции доказал, что электрическая энергия и механическая энергия взаимно преобразованы. Говорят, что это катализатор изобретения двигателей.В те дни Великобритания переживала период первой промышленной революции, и паровая энергия была движущей силой революции. Никто не мог признать важность двигателей, которые работали с электричеством в те дни без электросети.
На пути к практичным моторам
Никола Тесла |
С момента открытия Фарадеем электромагнитной индукции люди изобрели ряд двигателей.В 1834 году Томас Давенпорт изобрел практический двигатель постоянного тока. После этого югославскому инженеру-электрику, позже ставшему американцем Никола Тесла, пришла в голову идея управлять двигателями переменным током. В 1882 году идея принципа вращающегося магнитного поля внезапно поразила его голову, когда он гулял в парке. В 1887 году он закончил практический двухфазный двигатель переменного тока (асинхронный двигатель), использующий вращающееся магнитное поле. С тех пор были разработаны технологии переменного тока, такие как трансформатор, трехфазная трехпроводная система, а также электросети.Чем доступнее становилось электричество, тем шире использовались двигатели.
Благодаря прорыву Tesla теперь мы можем наслаждаться жизнью с помощью электричества и двигателей. Кстати, когда-то Тесла работал в компании, которой руководил великий изобретатель Эдисон, он вступил в конфликт с Эдисоном и покинул компанию в течение одного года. Тесла оставил слова, цинично искажающие слова Эдисона: «Гений — это 1 процент вдохновения и 99 процентов тщетных усилий».
Отечественное производство моторов и выезд Yaskawa Electric
Первый заказ размещен асинхронный двигатель |
Говорят, что первый двигатель, использованный в Японии, был для лифта (вмещал 15-20 человек, работал до 8 этажа) в Ry inunkaku, первом небоскребе в западном стиле в Японии, открытом в 1890 году в Асакуса, Токио.Не говоря уже о том, что такой технологии для проектирования и производства двигателей в Японии не было, в лифте использовался 15-сильный двигатель (двигатель постоянного тока), купленный в Америке. Хотя утверждается, что лифт прекратил свою работу в течение 1 года из-за частых поломок, это стало эпизодом, продемонстрировавшим стремление людей к моторизации.
В 1890-х годах в Японии начали использовать импортные двигатели, например, для насосов в шахтах. Поскольку уровень промышленных технологий в Японии в то время был значительно ниже, чем в Европе и Америке, большинство электрических устройств было импортным.Однако говорят, что они часто выходили из строя. Итак, двигатели отечественного производства постепенно набирали обороты.
В 1895 году был выпущен первый двигатель (асинхронный двигатель), произведенный в Японии. Затем, в 1915 году, Yaskawa Electric была основана как компания, которая производила и продавала электрические продукты, произведенные исключительно в Японии, и в 1917 году запустила первый заказ на асинхронные двигатели. С этого момента операторы угольных шахт начали размещать заказы на двигатели Yaskawa для их насосы и тягачи.
Различные виды и особенности двигателей
Через 180 лет после появления двигателей его характеристики и удобство использования значительно улучшились благодаря прогрессу в разработке и производстве технологий и материалов, а также электроники. Существуют различные способы вызова двигателей в зависимости от категоризации функций и структур, таких как серводвигатель для его точной работы по командам, линейный двигатель для его линейного движения, вибрационный двигатель для его вибрации для уведомления о входящем вызове на мобильном телефоне и мотор-редуктор для комбинированного редуктора.У двигателей также есть несколько названий, хотя их конструкция одинакова. Начиная с двигателя для угольной шахты, теперь, когда двигатели Yaskawa Electric находят применение в самых разных областях, таких как промышленное оборудование, роботы и электромобили (EV). Например, в приведенном ниже списке показаны несколько названий, используемых в двигателях для электромобилей. Люди назвали моторы, чтобы обозначить отличия от других, в результате осталось много названий для моторов. Это такой сложный фон, но вместе с тем «доказательство диверсификации автомобильной промышленности».”
Категоризация двигателей
Двигатели постоянного тока пропускают через него постоянный ток (DC), а двигатели переменного тока пропускают через него переменный ток. Бесщеточный электродвигатель постоянного тока — это электродвигатель постоянного тока, в котором вместо щетки и коммутатора используется полупроводниковый переключающий элемент. Универсальный двигатель может вращать двигатель на высокой скорости с помощью электричества 100 В переменного тока для домашних хозяйств, удерживая ту же щетку и коммутатор для двигателей постоянного тока. Кроме них, есть шаговый двигатель, который движется с прямоугольным потоком тока, и реактивный двигатель с переключаемым сопротивлением.Ультразвуковой двигатель — это специальный двигатель, который работает путем вибрации пьезоэлектрической керамики при приложении высокочастотного напряжения.
1) Двигатели постоянного тока
Двигатель, который многие японские ученики использовали в своих научных экспериментах в начальной школе, был электродвигателем постоянного тока. Это самый популярный двигатель, используемый в моделях, бытовой электронике и вибрационных двигателях в мобильных телефонах. Чтобы примерно объяснить устройство двигателей, в нем есть ротор и статор.Ротор — это часть, соединенная с валом, а статор — это неподвижная часть, которая составляет внешнюю часть.
Статор в двигателях постоянного тока удерживает постоянные магниты и щетки, которые подают электрический ток на ротор, а ротор удерживает обмотки и коммутатор. Как только щетки подают постоянный ток на коммутатор, электрический ток начинает течь через обмотки, подключенные к коммутатору, и создает крутящий момент. Здесь обмотки и коммутатор имеют механизм для протекания электрического тока таким образом, что крутящий момент остается на одном уровне.Самая большая особенность двигателя постоянного тока — его удобство использования с сухими элементами. Вы можете изменить направление вращения, просто изменив подключение проводов двигателя. Вот почему двигатели постоянного тока получили широкое распространение.
2) Бесщеточные двигатели постоянного тока
Бесщеточный двигатель постоянного тока можно охарактеризовать как «двигатель без щеток, обладающий характеристиками, аналогичными двигателю постоянного тока». Он содержит обмотки статора и постоянные магниты в роторе в качестве своей структуры. В нем нет щеток и коммутатора, которые раньше были в двигателях постоянного тока, вместо этого он содержит полупроводниковый переключающий элемент вне двигателя.Он работает, чтобы постоянно пропускать постоянный ток через две из трех фаз обмоток, фазы U, V и W. Он переключает поток тока в соответствии с положением постоянных магнитов, обнаруженным, например, датчиком элемента Холла, и продолжает генерировать то же самое. уровень крутящего момента.
3) Синхронные двигатели
С другой стороны, синхронный двигатель работает синусоидально, используя информацию, обнаруженную датчиком угла, прикрепленным к краю ротора. Синхронный двигатель назван в честь механизма, в котором вращение магнитного поля, создаваемого трехфазными обмотками, синхронизируется с вращением ротора.Конструкция синхронных двигателей в основном такая же, как и у бесщеточных двигателей постоянного тока. Поэтому люди часто принимают синхронные двигатели за бесщеточные двигатели постоянного тока и наоборот.
Одной из особенностей синхронных двигателей и бесщеточных двигателей постоянного тока является то, что они способны предотвращать износ щеток и электрические шумы. Они также могут уменьшаться в размерах, иметь высокую производительность и высокую эффективность за счет использования сильных редкоземельных магнитов. Благодаря этим характеристикам, существует широкий спектр применения, например, в информационных устройствах, бытовой электронике, автомобильных двигателях и серводвигателях.Говорят, что на двигатели постоянного тока приходится 70%, а общее количество бесщеточных двигателей постоянного тока и синхронных двигателей составляет 20% от общего количества произведенных малогабаритных двигателей.
4) Асинхронные двигатели
Принцип вращения асинхронных двигателей основан на «вращениях Араго», открытых французским физиком Араго. Это явление заключается в том, что когда вы помещаете алюминиевый диск между U-образным магнитом и перемещаете магнит в направлении вращения, алюминиевый диск начинает вращаться в том же направлении с небольшой задержкой по времени.Когда магнитное поле U-образного магнита изменяется на алюминиевом диске, спиральный электрический ток течет через алюминиевый диск (закон электромагнитной индукции), и действие тока и магнитного поля U-образного магнита генерирует электромагнитную силу. Асинхронные двигатели — это изобретение, применяемое во вращении Араго.
Статор асинхронных двигателей имеет в своем составе трехфазные обмотки. А на роторе находится алюминиевая деталь в виде клетки (корпусный проводник).Когда вы запускаете трехфазные обмотки в виде синусоиды, она генерирует магнитное поле, которое вращается с определенной частотой. Затем, как и в принципе вращения Араго, электрический ток течет через проводник с короткозамкнутым ротором, который воспринимает изменения магнитного поля, и ротор начинает вращаться с небольшой задержкой по времени.
Асинхронные двигателименее эффективны по сравнению с бесщеточными двигателями постоянного тока и синхронными двигателями, в которых используются постоянные магниты, однако у них есть другие особенности, например, они применимы к коммерческому трехфазному источнику питания переменного тока 200 В, с возможностью вращения без датчика Холла или датчик угла поворота, который трудно сломать, может эффективно работать с приводом переменного тока и обеспечивать большую мощность при использовании крупногабаритного двигателя.Таким образом, существует множество вариантов использования асинхронных двигателей в промышленной сфере и транспортных средствах. Подобно биоразнообразию, у нас есть множество двигателей, которые имеют широкий диапазон природы в зависимости от различия структур и распределения материалов.
Двигатели переменного тока и мотор-редукторы
Двигателипеременного тока и мотор-редукторы включают однофазные двигатели, используемые с однофазным источником питания переменного тока, и трехфазные двигатели, используемые с трехфазным источником питания переменного тока. Однофазный двигатель может работать, просто подключив его к однофазному источнику питания через поставляемый конденсатор.Трехфазный двигатель не требует конденсатора. Все, что вам нужно, это подключить двигатель напрямую к трехфазному источнику переменного тока.
Oriental Motor предлагает широкий ассортимент двигателей переменного тока и мотор-редукторов
- Доступны двигатели переменного тока с постоянной скоростью или с регулировкой скорости
- Однофазные или трехфазные типы
- Опции редуктора и электромагнитного тормоза
Подробнее …
Двигатели переменного тока с постоянной скоростью и мотор-редукторы
Двигателипеременного тока и мотор-редукторы включают однофазные двигатели, используемые с однофазным источником питания переменного тока, и трехфазные двигатели, используемые с трехфазным источником питания переменного тока.Однофазный двигатель может работать, просто подключив его к однофазному источнику питания через поставляемый конденсатор. Трехфазный двигатель не требует конденсатора. Все, что вам нужно, это подключить двигатель напрямую к трехфазному источнику переменного тока.
- 1 Вт (1/750 л.с.) до 3 л.с.
- Параллельный вал, прямоугольный цельный и полый вал или круглый вал (без шестерни)
- Однофазное или трехфазное напряжение переменного тока
Двигатели переменного тока с регулировкой скорости и мотор-редукторы
Двигатели с регулировкой скорости переменного тока и мотор-редукторы позволяют изменять скорость двигателя.Путем комбинирования двигателя переменного тока со специальной схемой управления можно изменять скорость. Доступен широкий ассортимент двигателей переменного тока и мотор-редукторов, которые можно легко использовать для управления скоростью.
- 6 Вт (1/125 л.с.) до 3 л.с.
- Замкнутый контур или инвертор / ЧРП
- Однофазное или трехфазное напряжение переменного тока
Редукторы скорости NEMA C-Face
Шестерни в этих редукторах NEMA C-Face отличаются высокой прочностью, не требуют технического обслуживания и могут устанавливаться в любом направлении благодаря конструкции с кольцевым уплотнением с проскальзыванием.Доступны варианты с низким и высоким передаточным числом, фланцевое крепление или крепление на лапах, под прямым углом или с полым валом под прямым углом. Подходит для двигателей переменного тока NEMA C-Face, бесщеточных двигателей постоянного тока и щеточных двигателей постоянного тока.
- Для двигателей от 1/2 до 3 л.с.
- Входные фланцы NEMA 56C, 140TC и 180TC
- Редукторы скорости с рядным цилиндрическим зубчатым колесом
- Редуктор скорости с прямоугольным гипоидным редуктором
Характеристики и типы мотор-редукторов переменного тока
Двигатели с постоянной скоростью бывают различных типов, как показано ниже.Выбирайте из широкого ассортимента продуктов в зависимости от области применения, требуемых функций, мощности и т. Д.
Частота источника питания определяет скорость
Базовая скорость (синхронная скорость) стандартного двигателя переменного тока определяется частотой источника питания и количеством полюсов. Многие из наших стандартных двигателей переменного тока имеют четыре полюса, поэтому их синхронная скорость составляет:
- 50 Гц: 1500 об / мин
- 60 Гц: 1800 об / мин
Фактическая скорость зависит от момента нагрузки.
У наших двигателей скорость примерно находится в следующих диапазонах при крутящем моменте нагрузки, эквивалентном номинальному крутящему моменту:
- 50 Гц: от 1200 до 1300 об / мин
- 60 Гц: от 1450 до 1600 об / мин
Номинальная скорость наших стандартных двигателей переменного тока установлена в указанных выше диапазонах и указана в технических характеристиках каждого двигателя. Для более точного расчета скорости машины используйте номинальную скорость в качестве справочной.
Частота источника питания варьируется от региона к региону.В случае использования автоматизированного оборудования в разных регионах измените передаточное число редуктора или примите соответствующие меры для получения желаемой скорости.
Асинхронные двигатели
Эти двигатели могут легко работать от источника переменного тока. Доступны однофазные и трехфазные двигатели.
Реверсивные двигатели
Эти однофазные двигатели переменного тока, генерирующие больший пусковой момент и оснащенные встроенным фрикционным тормозом, позволяют мгновенно переключать направление вращения.
Тип электромагнитного тормоза (асинхронный или реверсивный двигатель)
Эти двигатели переменного тока оснащены электромагнитным тормозом, активируемым при отключении питания, для удержания нагрузки в нужном положении при отключении питания.
Промывочные двигатели
Мотор-редукторы переменного тока с отличной водонепроницаемой и пыленепроницаемой структурой. Эти двигатели переменного тока соответствуют стандарту IEC IP67 или IP65.
Моментные двигатели
Специальный ротор используется для обеспечения большого пускового момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постепенно уменьшается с увеличением скорости).Крутящий момент можно изменить, изменив приложенное напряжение.
Низкооборотные синхронные двигатели
Использует тот же статор и ротор, что и в шаговых двигателях. Двигатель обеспечивает превосходные характеристики пуска, останова и реверса, а также синхронную работу.
Двигатели переменного тока с регулировкой скорости
В двигателяхс регулировкой скорости переменного тока используется система управления с обратной связью от встроенного тахогенератора.
Визуально обновляемые оценки состояния руки модулируют проприоцептивный рефлекс независимо от требований двигательной задачи
Существенных изменений:
1) Все три рецензента отметили, что доказательства, подтверждающие утверждение о том, что изменения в долгосрочном компоненте рефлекса растяжения связаны с повышенной неопределенностью в оценке состояний рук, являются слабыми. Начнем с того, что введение зрительно-моторного смещения в экспериментах не создает визуального искажения как такового (т.е. визуальный сигнал не ухудшается или не становится менее надежным). Таким образом, не ожидается, что зрительно-моторное смещение повлияет на визуальную дисперсию / точность. Скорее, это может повлиять на визуальную точность / предвзятость (или неспецифические ответы), которые, как было обнаружено, не влияют на весовые коэффициенты модальности в мультисенсорной интеграции.
Спасибо за важный комментарий. Как и в предыдущем комментарии, визуальное вращение, по-видимому, не вызывает «визуальных» искажений, но искажает визуально-моторную карту посредством визуальной обратной связи.Термины «искажение зрительной обратной связи», «искажение зрительной обратной связи» и «искажение зрительно-моторной карты» часто используются в исследованиях моторного обучения с зрительно-моторным вращением (более 100 раз по данным ученого Google). Поэтому мы хотели бы продолжать использовать термины «искажение (конечности) визуальной обратной связи» и «искажение визуальной обратной связи» в нашей отредактированной рукописи. Обратите внимание, что термин «визуальное искажение», использованный два раза в исходной рукописи, был изменен на «искажение визуальной обратной связи» в исправленной рукописи.
Но, как в вышеприведенном комментарии, во многих предыдущих исследованиях зрительно-моторного обучения, включая наши предыдущие исследования, часто использовались парадигмы визуального вращения, чтобы в основном сосредоточиться на сдвиге смещения конечной точки (например, Mazzoni and Krakauer, 2006; Saijo and Gomi, 2010 , 2012). В отличие от этих исследований двумерных движений, текущее исследование использовало движение с одной степенью свободы (только вращение запястья) и показало вращающуюся визуальную обратную связь. Мы не наблюдали каких-либо отклонений конечных точек во всех повернутых условиях (45 °, 90 °, 135 °, 180 °) от исходного состояния (0 °) в эксперименте 1.Вероятно, это связано с тем, что задачи, связанные с одномерным перемещением, относительно просты по сравнению с задачами, использующими двумерные перемещения. Однако в нашем текущем исследовании мы обнаружили, что отклонения (SD) конечной точки для условий 135 ° и 180 ° были значительно больше, чем для условия 0 °, что позволяет предположить, что большое вращательное искажение действительно увеличивает неопределенность используемых состояний. для управления двигателем.
При рассмотрении движений с измененной зрительной обратной связью в более общем плане было показано, что большой угол зрительного вращения, а также состояние зеркала увеличивают время реакции на рассматриваемые движения (Saijo and Gomi, 2010; Fernandez-Ruiz et al. ., 2011; Telgen et al., 2014). Это означает, что эти зрительно-моторные трансформации слишком сложны, чтобы легко устранить несоответствие между зрительной и проприоцептивной информацией. В результате этой сложности траектории движения становятся изменчивыми из-за визуального искажения даже после некоторого количества обучения, как показано в (Buch et al., 2003). Поэтому мы можем представить, что эти преобразования могут ухудшить интеграцию зрительных и проприоцептивных сигналов для представления состояний рук, что приведет к большим отклонениям конечных точек для условий большого визуального вращения.
В исправленную рукопись мы добавили анализ дисперсии конечных точек во всех условиях ротации Эксперимента 1 после увеличения числа участников в группе Агонистов в ответ на другой комментарий редактора / рецензента (см. Также наш ответ ниже) . Следует отметить, что метод определения конечной точки был улучшен, чтобы стабильно обнаруживать конец движения. Соответствующие предложения в разделе «Материалы и методы» изменены. Мы также добавили вышеуказанные исследования в подраздел «Влияние зрительных стимулов на моторную коррекцию».
В соответствии с вышеизложенным, в некоторых экспериментах (например, Эксперимент 2) нет четкой тенденции между изменчивостью движений и ЭМГ сгибателей. Если изменения в достоверности оценки состояния приводят к ослаблению рефлекса растяжения, как предложено авторами, то рефлекс растяжения должен быть ниже в нормальном состоянии укрытия по сравнению с состоянием зеркального отражения. Могут ли авторы показать эту отрицательную взаимосвязь между вариабельностью конечных точек и амплитудой рефлекса по данным участников, которых они ускользают (как выглядят корреляционные значения)?
Мы очень ценим это вдумчивое изучение наших данных.Соответственно, мы рассчитали значения корреляции между вариабельностью конечной точки и амплитудой рефлекса для каждого участника эксперимента 2. Среднее значение коэффициента корреляции составило -0,73 (бутстраповский 95% ДИ [-0,79 -0,66]), что значительно отличалось от нулевого значения. . Хотя это предполагает статистически значимую связь между дисперсией конечной точки и изменением рефлекса, значения корреляции не были высокими. Если мы предположим, что дисперсия конечной точки полностью коррелировала с представлением неопределенности состояния, мы можем ожидать более высокой корреляции между изменениями рефлекса и дисперсией конечной точки.Однако, поскольку на дисперсию конечной точки также может повлиять (уменьшить) онлайн-визуальная коррекция в условиях визуальной обратной связи, дисперсия конечной точки в условиях нормального и зеркального отображения будет, как правило, недооценена. А именно, различия в SD конечных точек между условиями Hide и Show могут быть переоценены как показатель неопределенности представления состояния. Этот смешивающий фактор может ухудшить симметричную взаимосвязь между изменением SD конечной точки (рис. 4C) и изменением амплитуды рефлекса (рис. 4E).
Отрицательная корреляция между изменениями рефлекса и конечной точки SD была последовательно обнаружена в эксперименте 1 и эксперименте 3, что убедительно подтверждает идею модуляции рефлекса растяжения неопределенностью оцененных состояний. В измененной рукописи значения корреляции Эксперимента 1, Эксперимента 2 и Эксперимента 3 были описаны в разделе «Результаты».
Учитывая, что переменные ошибки сообщаются только для некоторых условий, а систематические ошибки не сообщаются ни для одного из условий, трудно оценить, повлияли ли какие-либо экспериментальные манипуляции на выполнение двигательной задачи.Это важно, потому что если изменения в визуальном отображении вызывают изменения в движении, то мы не можем сделать вывод, происходит ли модуляция рефлекса растяжения из-за изменения зрительных стимулов или из-за изменения движения. Анализ движений с точки зрения точности и времени движения требуется во всех четырех экспериментах, а также их взаимосвязи с ЭМГ сгибателей.
Благодарим вас за внимательное рассмотрение и приносим свои извинения за недостаточную информацию в оригинальной рукописи.В отредактированной рукописи были указаны продолжительность движения, положение конечной точки (смещения), стандартное отклонение конечной точки (дисперсия) и пиковая скорость движений во всех экспериментах (номера цифр в исправленной рукописи перечислены ниже). В результате мы обнаружили значительное увеличение дисперсии конечных точек не только в эксперименте 2, но и во всех других экспериментах. Если мы можем предположить, что дисперсия конечной точки является разумным маркером неопределенности оцениваемых состояний, как это было рассмотрено в предыдущем исследовании (Wolpert et al., 1995; Izawa and Shadmehr, 2008), этот результат усиливает идею о том, что усиление рефлекса растяжения регулируется неопределенностью репрезентации состояния.
Что касается других кинематических переменных, в Эксперименте 1 конечные точки во всех повернутых условиях не отличались от таковых в базовых условиях (0 °), хотя мы обнаружили значительную разницу в положении конечных точек между 45 ° и 90 ° в апостериорных условиях. сравнение, как показано на рисунке 2 — приложение к рисунку 1B. Таким образом, разница в средней конечной точке не учитывает снижение рефлекса растяжения при больших углах визуального вращения.Кроме того, другие показатели (продолжительность движения, пиковая скорость и фоновая ЭМГ) существенно не различались в зависимости от углов поворота курсора. Таким образом, модуляция рефлекса растяжения не связана с изменениями кинематики движения.
В Эксперименте 2 и Эксперименте 4, хотя пиковые скорости не различались в зависимости от условий, были обнаружены небольшие, но существенные различия в положении конечной точки и продолжительности движения, вероятно, из-за удаления курсора и поворота зеркала. Поэтому, чтобы оправдать сравнение реакций рефлекса растяжения в различных условиях зрительной обратной связи, скорость руки непосредственно перед приложением механического возмущения и фоновая ЭМГ (BGA) также указаны в приложениях к рисункам (Рисунок 4 — приложение к рисунку 1D и 1E и рисунок 8 — приложение к рисунку 1Е и 1F соответственно) в переработанной рукописи.Не было различий в этих значениях между условиями в каждом эксперименте, что позволяет предположить, что различие в модуляции рефлекса растяжения не может быть связано с изменениями кинематики движения и фоновой мышечной активности.
Для эксперимента 1 (группа агонистов)
Продолжительность движения: Рисунок 2 — приложение к рисунку 1A
Конечная точка (смещение): Рисунок 2 — дополнение к рисунку 1B
Endpoint SD: рисунок 2B
Пиковая скорость: Рисунок 2 — дополнение к рисунку 1C
для эксперимента 1 (группа антагонистов)
Продолжительность движения: Рисунок 3 — приложение к рисунку 1A
Конечная точка (смещение): Рисунок 3 — дополнение к рисунку 1B
SD конечной точки: Рисунок 3B
Пиковая скорость: Рисунок 3 — приложение к рисунку 1C
Для эксперимента 2
Продолжительность движения: Рисунок 4 — приложение к рисунку 1A
Конечная точка (смещение): Рисунок 4 — дополнение к рисунку 1B
SD конечной точки: Рисунок 4C
Пиковая скорость: Рисунок 4 — дополнение к рисунку 1C
Скорость руки в начале МП: Рисунок 4 — дополнение к рисунку 1D
Фоновая ЭМГ сгибателя (BGA): Рисунок 4 — приложение к рисунку 1E
Для эксперимента 3
Продолжительность движения: Рисунок 5 — приложение к рисунку 1A,
Конечная точка (смещение): Рисунок 5 — приложение к рисунку 1B,
Endpoint SD: рисунок 5C,
Пиковая скорость: Рисунок 5 — приложение к рисунку 1C,
Фоновая ЭМГ сгибателя (BGA): Рисунок 5 — приложение к рисунку 1D,
Для эксперимента 4
Продолжительность движения: Рисунок 8 — приложение к рисунку 1A
Конечная точка (смещение): Рисунок 8 — дополнение к рисунку 1B
Endpoint SD: Рисунок 8 — дополнение к рисунку 1C
Пиковая скорость: Рисунок 8 — дополнение к рисунку 1D
Скорость руки в начале МП: Рисунок 8 — дополнение к рисунку 1E
Фоновая ЭМГ сгибателя (BGA): Рисунок 8 — приложение к рисунку 1F
Кроме того, авторам следует рассмотреть альтернативную точку зрения.Как визуальная обратная связь улучшает оценку состояния? Если усиление выше с визуальной и проприоцептивной обратной связью, это означает, что интегрирование выполняется с учетом различных задержек, в противном случае объединение движения, связанного с возмущением, с визуальной информацией, полученной до того, как возмущение должно вызвать уменьшение усиления отклика в комбинированном случае, потому что на коротком интервале возмущения еще не видно. Таким образом, интеграция визуальной и проприоцептивной обратной связи дает увеличение усиления (при условии, что искажение влияет на надежность) только в том случае, если интеграция выполняется с учетом динамики и задержек.В этом отношении и вопреки мнению авторов, рецензенты предполагают, что текущие результаты хорошо согласуются с результатами, представленными в Crevecoeur et al., (2016). Рецензенты рекомендуют более подробно изучить и явным образом представить допущение между искажением и надежностью, а также приложить усилия, чтобы лучше обосновать или теоретически показать, почему или при каких обстоятельствах ожидалось снижение усиления отклика при изменении визуальных условий.
Спасибо за содержательный комментарий.Как и в комментарии, мы полностью согласны с тем, что различные задержки следует принимать во внимание для сенсорной интеграции, которая сильно влияет на репрезентацию состояния. Наша гипотеза не противоречит Crevecoeur et al., (2016), которые показали важность короткой задержки проприоцептивной информации при оценке состояний конечностей. Однако только с такой формулировкой мы думаем, что снижение усиления рефлексов, наблюдаемое в наших экспериментах, не может быть объяснено. Если мы используем модель оптимального управления для зрительно-моторного контроля достижения, потребуется некоторое расширение модели, чтобы воспроизвести наше наблюдение.Есть как минимум два возможных объяснения снижения рефлекса растяжения.
Одна возможность состоит в том, что оптимальная политика управления, вычисляющая усиление обратной связи, изменяется для оценки неопределенности представления состояния. Увеличение неопределенности оценок состояния может вызвать уменьшение усиления проприоцептивной обратной связи, если меньшее усиление является «оптимальным» при оценке неопределенности в политике. Чтобы избежать ненужной или вредной компенсаторной двигательной реакции, изменение политики (или стратегии) снижения рефлекса растяжения было бы разумным, когда самой проприоцептивной информации недостаточно для представления надежного состояния конечности в пространстве задачи (визуальном).В таком случае рефлекс растяжения с короткой задержкой также может быть изменен нисходящим регулированием, даже если он не участвует в оценке состояния высокого уровня.
Другая возможность состоит в том, что увеличение неопределенности в оцененных состояниях вызывает уменьшение усиления фильтра в процессе оценки состояния, что может привести к задержке отслеживания в оценке состояния, что приводит к уменьшению корректирующей команды для переходного возмущения. Как описано в рукописи, эта возможность снижения усиления из-за увеличения неопределенности состояния была исследована ранее для зрительно-моторных реакций (Izawa and Shadmehr, 2008).Учитывая влияние неопределенности состояния на регуляцию проприоцептивно-моторной реакции, показанное в нашем исследовании, представляется возможным в будущем исследовании расширить вычислительную модель, включив в нее мультимодальную интеграцию для достижения движений. В обоих случаях нам нужно предположить, что по крайней мере часть команды двигателя генерируется с упреждением, чтобы реализовать заранее заданную скорость движения. Эта идея была поддержана многими экспериментальными и модельными исследованиями (Wolpert et al., 1998; Kawato, 1999; Sabes, 2000; Bastian, 2006; Saijo and Gomi, 2010).
Вышеупомянутое обсуждение было добавлено в раздел «Обсуждение» (Неопределенность в оценках состояния влияет на усиление обратной связи) исправленной рукописи.
2) Второй вопрос, поднятый рецензентами, — это низкие размеры выборки во всех экспериментах. Похоже, есть тенденция к короткому латентному компоненту рефлекса растяжения (рис. 2C), который необходимо проверить на больших объемах выборки. В случае подтверждения эта тенденция окажет явное влияние на интерпретацию. основано на прочных теоретических основаниях.Например, рассмотрим результаты Yang et al., 2011, которые показали, что требуется не менее 70 мс, а другие исследования с зрительно-моторными пертурбациями обнаружили значения, близкие к 100 мс, чтобы интегрировать новую визуальную информацию в целенаправленный ответ (например, Pisella, 2000 ; Cressman et al., 2006). Представляется разумным предположить, что при изменении визуальной обратной связи участники изменили свою политику контроля, уменьшив усиление отклика неспецифическим образом. Частично это можно проверить, посмотрев на короткую задержку с большим количеством субъектов.Авторы действительно демонстрируют, что могут быть различия в зрительно-моторной и проприоцептивной системах, но это не исключает неспецифического снижения каждой модальности. Базовые схемы различны, и было бы удивительно увидеть одинаковое сокращение в обеих.
В соответствии с вышеуказанным запросом мы добавили восемь участников в группу агонистов эксперимента 1. В результате мы обнаружили значительные отличия компонентов рефлекса с короткой задержкой в условиях 90 ° и 135 ° от базовой линии (0 °), но не обнаружил отличий в состоянии 180 ° от базовой линии.Эта тенденция модуляции рефлекса растяжения с короткой задержкой не была сопоставима с таковой для рефлекса растяжения с длительным временем ожидания, как показано на рисунке 2D. Кроме того, мы не обнаружили какой-либо модуляции компонента рефлекса растяжения с короткой задержкой в группе антагонистов Эксперимента 1, Эксперименте 2 (Нормальный / Зеркальный, Показать / Скрыть), Эксперименте 3 (Изменение длительности скрытия) или Нормальных / Зеркальных условиях в Эксперименте 4 , в то время как модуляция рефлекса с длительным временем ожидания постоянно наблюдалась в этих экспериментах. Поскольку в этом исследовании мы в основном фокусируемся на модуляции компонентов с большой задержкой, и мы не смогли найти какой-либо систематической модуляции компонентов с короткой задержкой в эксперименте 1, мы не добавляли участников в другие эксперименты.
Конечно, мы не отрицаем возможность модуляции кратковременной составляющей визуальной информацией. В дополнение к относительно быстрому влиянию зрительных стимулов на двигательные реакции (Cressman et al., 2006; Pisella et al., 2000; Yang et al., 2011), предыдущее исследование четко продемонстрировало модуляцию коротколатентного компонента визуальными стимулами. (Weiler et al., 2019). Модуляция компонента с короткой задержкой, наблюдаемая в нашем исследовании, может быть частично объяснена изменением политики снижения специфического усиления проприоцепции, как это было проверено в предыдущем ответе.Как было показано ранее (Weiler et al., 2019), рефлекс растяжения с короткой задержкой можно модулировать в зависимости от задачи.
Однако, как объяснено выше, мы не наблюдали аналогичной модуляции компонентов с короткой и длинной задержкой. Скорее, мы наблюдали значительную модуляцию вариабельности конечных точек за счет визуальных искажений (вращение и зеркальное отражение) и за счет исключения курсора, и что амплитуды компонентов с большой задержкой были отрицательно коррелированы с наблюдаемой вариабельностью конечных точек.Основываясь на недавнем рассмотрении многомодальной оценки состояния и моделей оптимальной обратной связи, мы предполагаем, что модуляция рефлекса растяжения связана с неопределенностью оцениваемых состояний. Некоторая степень снижения рефлекса растяжения неспецифическим (то есть не связанным с задачей) образом может быть объяснена этой скрытой связью между неопределенностью состояния и модуляцией рефлекса. Вышеупомянутое исследование было добавлено в раздел «Обсуждение» (подразделы «Влияние визуальных стимулов на моторную коррекцию» и «Неопределенность в оценках состояния влияет на усиление обратной связи»).
3) Третья необходимая доработка — это анализ «испытаний улова», чтобы убедиться, что испытуемые постоянно обращали внимание на визуальную обратную связь. Рецензенты могут видеть ценность постоянного движения руки в разных условиях, так что изменяется только визуальное отображение. Однако, как упоминалось выше, мы не знаем, были ли фактические движения постоянными в разных условиях. Более того, многократное повторение одного и того же движения дает испытуемым возможность запомнить движение и научиться выполнять его, не обращая внимания на визуальную обратную связь.Эксперимент 1 показывает, что некоторые испытания содержали визуальное возмущение, чтобы предотвратить это, но не представлен анализ этих испытаний, подтверждающий, что испытуемые постоянно обращали внимание на визуальную обратную связь.
Спасибо за ваше пристальное внимание к экспериментальному контролю. Мы проанализировали данные испытаний на улов. Средние конечные точки испытаний по улову каждого участника в каждом условии угла поворота и соответствующее время реакции показаны на рисунке 2 — добавление к рисунку 1D в исправленной рукописи.Как показано на рисунке, участники правильно сместили конечные точки движения в испытаниях по уловам, и это время реакции было достаточно коротким, что позволяет предположить, что все участники постоянно обращали внимание на обратную связь визуального курсора. В отредактированную рукопись добавлены краткие пояснения в разделе «Результаты».
4) Всем рецензентам было трудно следить за экспериментальными манипуляциями и, следовательно, за испытаниями, включенными в некоторые из экспериментов (в частности, в отношении эксперимента № 4).Пожалуйста, поясните различные типы испытаний и инструкции для всех экспериментов (например, что участники должны были делать в состоянии антиреакции?).
Мы добавили сводные таблицы условий сеанса / блока / испытания (Таблица 2, Таблица 3 и Таблица 4) для Эксперимента 3 и Эксперимента 4, чтобы прояснить эксперименты в измененной рукописи, как написано для Эксперимента 2. Кроме того, описания методов Эксперимента 3 и Эксперимент 4 были полностью переработаны, чтобы прояснить условия и задачи испытаний.Поскольку условия эксперимента 1 были настолько простыми, мы просто оставили объяснение экспериментальной манипуляции в основном тексте.
5) Что касается статистики, то вроде: i. Статистика определения времени коррекции руки в эксперименте 4 не ясна. Задержка ответа оценивается на основе среднего пути / производительности, индивидуальных испытаний для каждого участника или всех испытаний? Учитывая, что было выполнено большое количество односторонних тестов t , какие корректировки были внесены для множественных сравнений? И зачем был нужен этот метод? Почему бы просто не определить пороговое значение ускорения?
Задержка ответа была оценена путем последовательного сравнения двух наборов данных для прямого и обратного перехода для каждого участника.Этот метод стандартно используется для нахождения точек расхождения для данных временных рядов, статистически расходящихся (Prablanc, Martin, 1992; Diamond et al., 2015; Crevecoeur et al., 2016) без корректировки статистических пороговых значений (возможно, потому что основная цель в этом случае анализ не является строгими p-значениями). Хотя обнаружение начала с помощью порогового значения также широко используется (Oostwoud Wijdenes et al., 2014), расчетная задержка будет относительно чувствительна к пороговому значению. В частности, если отклик не намного превышает базовую изменчивость, может быть трудно определить разумное пороговое значение для точного и стабильного обнаружения запуска, потому что малое пороговое значение может неправильно обнаруживать базовое изменение, поскольку задержка и большие пороговые значения могут оценивать задержку дольше, чем истинное ‘ значение.В текущем исследовании нам было трудно выбрать хорошее и постоянное пороговое значение для всех участников из-за большой вариабельности между испытаниями и шумов в сигналах ускорения и ЭМГ. Таким образом, мы использовали последовательные t -тесты в качестве метода обнаружения задержки. Были процитированы статьи, в которых использовался аналогичный метод, и было пересмотрено объяснение обнаружения задержки. [Подраздел «Сбор и анализ данных» в отредактированной рукописи].
ii. Зачем анализировать каждую группу в эксперименте 1 с помощью отдельных односторонних дисперсионных анализов? ANOVA смешанной модели с факторами «группа» (между субъектами) и «угол поворота» (внутри субъекта) будет более простым.
В эксперименте 1 нас в основном интересуют эффекты визуальной обратной связи на рефлексы растяжения мышцы-сгибателя (агониста) в одной группе и мышцы-разгибателя (антагониста) в другой группе, отдельно. Два эксперимента были выполнены независимо, механические возмущения были приложены в противоположных направлениях. Поэтому, хотя основные задачи в этих экспериментах были одинаковыми, мы считаем, что нет необходимости (или нецелесообразно) сравнивать данные между этими условиями.Кроме того, поскольку исходная активность мышц-агонистов и антагонистов совершенно различна и независима по своей природе, мы не можем предполагать однородность дисперсии между этими двумя переменными. Таким образом, мы считаем нецелесообразным напрямую сравнивать эти переменные в одном ANOVA.
https://doi.org/10.7554/eLife.52380.sa2Портативный дефибриллятор — The Official Escape from Tarkov Wiki
Портативный дефибриллятор | |||||||||||||||||||||||||
Портативный дефибриллятор (Дефибриллятор) входит в комплект поставки Escape from Tarkov . Внезапная остановка сердца (ВСС) может случиться с кем угодно, когда угодно и где угодно. Компания Phipils использует технологию SMART Biphasic в своих дефибрилляторах HeartStart для создания эффективного сильноточного дефибрилляционного разряда при более низкой дозе энергии и минимизации побочных эффектов.
Портативный дефибриллятор можно найти только в мире и контейнерах на картах The Lab и Interchange. Лаборатория [править | править источник]
Interchange [править | править источник]Двигатели и схемы управления двигателямиЭтот курс также можно пройти для получения академического кредита как ECEA 5341, часть степени магистра наук в области электротехники CU Boulder. Автовозы | TxDMV.govПриостановлены требования к выдаче разрешений на крупногабаритный / избыточный вес на случай зимней погодыГубернатор Техаса Грег Эбботт объявил о катастрофе в 254 округах Техаса в связи с экстремальными погодными условиями зимой.Департамент автотранспортных средств Техаса отреагировал на это, временно приостановив требования разрешений на негабаритный / избыточный вес для транспортных средств и грузов, связанных с деятельностью, необходимой для реагирования на стихийное бедствие. Кроме того, Департамент транспортных средств Техаса в настоящее время временно приостанавливает действие плана международной регистрации (IRP) и 72-часовых и 144-часовых разрешительных требований для транспортных средств и грузов, связанных с деятельностью, необходимой для реагирования на стихийное бедствие. В транспортном средстве должны находиться копии Отказа губернатора Грега Эбботта и Уведомления об отказе от требований TxDMV, оба из которых прилагаются ниже. Кроме того, президент Джозеф Байден одобрил объявление о чрезвычайной ситуации в Техасе, которое можно найти по адресу President-Joseph-R-Biden-Jr-Approves-Major-Discovery-Texas. Это дает Техасу право выдавать федеральное разрешение на оказание помощи при стихийных бедствиях (MAP-21), которое теперь доступно через Систему выдачи разрешений и оптимизации маршрутов Техаса (TxPROS). Рекомендации Федерального управления шоссейных дорог по использованию этого разрешения приведены по ссылке ниже. Уведомление о подвеске TxDMV
Примеры помощи при стихийных бедствиях включают, но не ограничиваются ими, транспортные средства, используемые для перевозки гуманитарных работников, продуктов питания, воды, одежды, оборудования, медицинских принадлежностей, материалов, топлива, жилья и других предметов снабжения в районы стихийных бедствий. в качестве транспортных средств, используемых для восстановления инженерных сетей и вывоза мусора из зон бедствия, перечисленных в декларации бедствия. Приостановление действия не распространяется на какие-либо требования, прямо не указанные в этом уведомлении, включая требования безопасности и страхования.Кроме того, операторы несут ответственность за безопасный маршрут движения своих транспортных средств и получение актуальной информации об опасных дорожных условиях до начала движения. Оператор коммерческого транспорта должен хранить следующую документацию в кабине транспортного средства и предоставлять ее любому офицеру по поддержанию мира в Техасе по запросу: Эти отстранения остаются в силе до тех пор, пока не будут отменены Управлением губернатора или пока не истечет срок действия декларации о стихийном бедствии, упомянутой выше. COVID-19 / Коронавирус
Информация о ликвидации последствий урагана Харви
Что такое Motor Planning | РазобралсяВозможно, вы знакомы с условиями мелкая моторика и крупная моторика.Но что такое моторное планирование? Этот важный навык является ключом к , выполняющему движения. Это позволяет нам знать, запоминать и выполнять небольшие шаги, которые приводят к выполнению определенного движения или задачи. Например, обычная чистка зубов может показаться автоматической. Но наш мозг на самом деле выполняет молниеносное планирование, прежде чем мы начнем и когда мы продолжим чистить зубы. Он определяет, как мы будем двигаться, какие шаги и порядок, в котором мы должны их делать. Без навыков двигательного планирования зубная щетка может никогда не добраться до вашего рта. Узнайте больше о навыках моторного планирования и их роли в обучении и выполнении повседневных задач. Двигательное планирование — это часть группы навыков, которые помогают нам двигать телом так, как мы хотим. Есть разные виды моторики, которые мы используем снова и снова на протяжении всей жизни, чтобы добиться цели. Большая моторика помогает нам двигать большими мышцами, чтобы мы могли выполнять такие действия, как ходьба, прыжки и балансировка. Мелкая моторика помогает нам двигать более мелкими мышцами, которые контролируют наши руки, запястья и ступни.Они ключ к более мелким действиям, таким как взятие карандаша или завязывание шнурков. Координация — это то, как мы организуем все наши физические действия, чтобы двигаться эффективно. Все эти навыки необходимы для физических действий. Но что-то должно произойти , прежде чем мы сможем эффективно использовать эти навыки. Нам нужно подумать о том, как мы будем двигать своим телом, чтобы выполнить поставленную задачу. Вот пример. Когда мы учились мыть руки в детстве, кто-то показал нам, как это делать.В конце концов, однако, нашему мозгу пришлось выяснить, как наше тело физически будет делать то, что нам показали. Как нам двигать руками и пальцами, чтобы достать мыло? Как мы будем держать мыло, чтобы потереть его руками? Как далеко мы отойдем от раковины, чтобы вода не разбрызгивалась? Мы также должны были продумать порядок всех этих шагов. Вначале было очень тяжело. Нам приходилось делать все очень медленно. Нам приходилось постоянно корректировать то, что мы делали — мыть дольше или приближаться к раковине.Мы уделили много внимания процессу. И с исправлениями и помощью мы, в конце концов, смогли сделать это самостоятельно. Две вещи резко меняются, когда мы действительно знаем, как мыть руки. Мы движемся намного быстрее и точнее. Нам не нужно уделять столько внимания нашим действиям. Они стали автоматическими. Мы планируем всю задачу быстро и эффективно. И если нам нужно внести исправления, мы сможем это легко сделать. Проблемы с двигательным планированиемДвигательное планирование — это процесс, который помогает нам изучать двигательные действия.Вы пробуете что-то и сразу же получаете обратную связь о том, как все прошло. Вы настраиваете то, что делаете, и пытаетесь снова. И вы продолжаете приспосабливаться, пока не найдете наиболее эффективный способ сделать это. С этого момента ваш мозг каждый раз быстро планирует это действие. Однако когда у детей возникают проблемы с двигательным планированием, им нелегко учиться на обратной связи. Даже если они уже выполняли задание раньше, похоже, что они делают это впервые. Дети, которым сложно научиться планировать движения, могут казаться неуклюжими.Может показаться, что они медленно осваивают базовые навыки и тратят «вечность» на выполнение физических задач, таких как завязывание обуви. Проблемы с двигательным планированием также могут повлиять на успеваемость детей в школе, поскольку им могут быть трудно выполнять основные физические задачи. Проблемы с двигательным планированием могут быть частью более серьезной проблемы с движением и координацией. Часто встречается у детей, у которых нарушение координации развития (DCD), которое иногда называют диспраксией. Как помочь ребенку с двигательным планированиемЕсли ваш ребенок борется с двигательным планированием, важно знать, что этот навык можно улучшить.An эрготерапевт может помочь вашему ребенку выучить начальные шаги и последовательность задач. Это поможет сделать задачи более автоматическими. Но это требует времени, терпения, визуальных и физических демонстраций и большого количества практики. Наверх
| |||||||||||||||||||||||||