Робот и автомат в чем разница
Автоцентр Сервис Технологии Робот против автомата. Плюсы и минусы коробок передач
Марка
Модель
Оставьте ваши контактные данные:
По телефону
На почту
Уточните удобное время для звонка:
День/дата
- День/дата
- Сегодня
- Завтра
- 24
- 25
- 26
- 27
- 28
- 29
Часы
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
Минуты
- 10
- 20
- 30
- 40
- 50
Отправляя заявку я предоставляю свое согласие на сбор и обработку предоставленных мною личных персональных данных в соответствии с Законом Украины «О защите персональных данных»
Оставьте ваши контактные данные:
Уточните удобное время для звонка:День/дата
- День/дата
- Сегодня
- Завтра
- 24
- 25
- 26
- 27
- 28
- 29
Часы
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 19
- 20
Минуты
- 10
- 20
- 30
- 40
- 50
Прямо сейчас
Отправляя заявку я предоставляю свое согласие на сбор и обработку предоставленных мною личных персональных данных в соответствии с Законом Украины «О защите персональных данных»
Оставьте ваши контактные данные:
Выберите машину:
Марка
- Сначала выберите дилера
Модель
- Сначала выберите марку
Отправляя заявку я предоставляю свое согласие на сбор и обработку предоставленных мною личных персональных данных в соответствии с Законом Украины «О защите персональных данных»
Sample Text
Оставьте ваши контактные данные:
Выберите машину:
Марка
- Сначала выберите дилера
Модель
- Сначала выберите марку
День/дата
- День/дата
- Сегодня
- Завтра
- 24 сентября
- 25 сентября
- 26 сентября
- 27 сентября
- 28 сентября
- 29 сентября
- 30 сентября
- 01 октября
- 02 октября
- 03 октября
- 04 октября
- 05 октября
- 06 октября
Часы
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
Минуты
- 00
- 10
- 20
- 30
- 40
- 50
Отправляя заявку я предоставляю свое согласие на сбор и обработку предоставленных мною личных персональных данных в соответствии с Законом Украины «О защите персональных данных»
X
Оберіть мовну версію сайту. За замовчуванням autocentre.ua відображається українською мовою.
За замовчуванням autocentre.ua відображається українською мовою.
Слава Україні! Героям слава!
Ви будете перенаправлені на українську версію сайту через 10 секунд
какая из них лучше простыми словами
Разница робота от коробки автомат сразу незаметна. Водитель – новичок не сможет найти различия. В обоих передачи переключаются самостоятельно без участия человека. В действительности здесь присутствует много конструктивных и визуальных отличий.
Содержание
- 1 Как отличить автомат от робота визуально
- 2 Разница по конструкции
- 3 В чем разница по плавности и скорости переключения
- 4 Отличия в обслуживании и ремонте
- 5 По потреблению масла и топлива
- 6 Что лучше
- 7 Итог
2 агрегата имеют плюсы и минусы. Преимущества АКПП:
- более простое и удобное управление;
- невысокий расход топлива при большом количестве ступеней переключения;
- надежность и долговечность гидротрансформатора.

Плюсы робота:
- небольшая стоимость агрегата;
- малый вес изделия;
- хорошая динамика;
- доступный и недорогой ремонт.
Недостатки АКПП:
- неудобная динамика разгона автомобиля;
- высокие цены на запчасти;
- наличие гидротрансформатора снижает КПД агрегата.
Минусы робота:
- наличие пробуксовок, снижающих ресурс коробки;
- паузы при переключении передач;
- в отличие от автомата щелканье скоростей более резкое;
- останавливаясь, необходимо переставлять рычаг в нейтральное положение ручным способом.
Учитывая сильные и слабые стороны агрегатов, каждый водитель выбирает для себя приемлемый вариант, ну а наше мнение высказано дальше.
Как отличить автомат от робота визуально
По фото визуальных отличий незаметно. В действительности они есть, и опытный человек внешне их сразу найдет. Первое — это рычаг селектора. В АКПП следующие положения:
- Р — парковка;
- N – нейтраль;
- R — задняя передача;
- D — перемещение вперед.

Существуют и другие, они отличаются в зависимости от модели. У робота заметны положения:
- N – нейтральная;
- R – задняя;
- D – движение вперед.
Парковка отсутствует.
Отличить вариатор от других агрегатов можно, внимая имеющиеся режимы. Кроме основных положений в АКПП могут присутствовать «L», «2», и «3». У вариатора только один режим — «L».
Разница по конструкции
АКПП отличается от робота наличием:
- Гидротрансформатора, выполняющего функцию сцепления. Обеспечивает плавное без рывков переключение передач. Работа осуществляется на основе анализа полученных сигналов о режиме движения и оборотах двигателя автомобиля.
- Редуктора — система зацепления из зубчатых колес и шестерен.
Переключается в автоматическом режиме, достигая мотором определенных оборотов.
Роботизированная коробка в отличие от АКПП выполняется в 2-х вариантах:
- Обычная механика, но с присутствующим электронным блоком, подающим команды на щелканье скоростей.
- Усовершенствованная РКПП с двумя системами сцепления.
В конструкцию робота входят:
- 2 вала с сцеплением;
- актуатор или сервопривод;
- электронный блок.
Переключается в автоматическом порядке. Отвечает электронный блок управления, что является главным отличием робота. Далее представлено видео, где наглядно показывается функционирование АКПП и робота.
В чем разница по плавности и скорости переключения
По функциональным характеристикам на автомате ездить удобнее. Связано с тем, что здесь передачи переключаются плавно. Вручную ничего делать не требуется.
Робот не в состоянии быстро гасить рывки. Автомобиль движется динамичнее, меньше потребляет топлива, а скорости щелкаются быстрее. Возможен переход на полу ручное управление. Оно не полное, переключаться можно только в одном положении.
Отличия в обслуживании и ремонте
АКПП нуждается в правильном сервисе. Выражается в следующем:
Выражается в следующем:
- Регулярная замена масла через определенный период.
- Установка нового фильтра, который забивается различными мелкими частицами.
- Промывка коробки. Совершается, когда у АКПП большой пробег.
Необходимо осуществлять регулярную плановую компьютерную диагностику агрегата. Если процедуру проводить вовремя — возможно выявление проблем на ранней стадии, что исключит вероятность серьезного ремонта.
Отличительная особенность обслуживания робота — диагностика электронного блока. Отсюда возникают все неполадки. Электронную систему нужно регулярно адаптировать под ресурс трансмиссии. В чистом состоянии должен находиться мехатронный блок. Не допускается наличие загрязнений или подтеков смазки на его поверхности.
По потреблению масла и топлива
Если агрегаты находятся в хорошем состоянии, то и расхода жидкостей в автомате и роботе наблюдаться не должно. По рекомендациям завода замена смазочного материала вообще не должна проводиться. Водители не придерживаются рекомендаций и меняют масло в коробке через 60000 км пробега. Забегая вперед, стоит сказать, что это правильно, ведь производитель заинтересован, чтобы ресурс агрегата не превышал 200к, а обновляя смазку, продлевается жизнь этого узла. Механики автомастерских аналогичного мнения.
Водители не придерживаются рекомендаций и меняют масло в коробке через 60000 км пробега. Забегая вперед, стоит сказать, что это правильно, ведь производитель заинтересован, чтобы ресурс агрегата не превышал 200к, а обновляя смазку, продлевается жизнь этого узла. Механики автомастерских аналогичного мнения.
У автомобилей одинаковой мощности потребление горючего наблюдается больше у того, где установлен автомат. Отличие небольшое. Многое зависит от стиля езды. Если не перегружать автомобиль и плавно нажимать на газ, то даже с АКПП расход существенно снизится.
Что лучше
Ответить можно на основании отзывов. Водители, привыкшие к АКПП, на 70% остаются ее приверженцами. Им нравится плавный разгон автомобиля и простота управления.
Итог
Однозначно дать совет по выбору АКПП или робота возможно, проанализировав текущие потребности и бюджет водителя. Когда денег достаточно подойдет автомат, но мысленно стоит готовится, что на ремонт агрегата должна быть отложена некая сумма. Взамен владелец получит более удобное передвижение. Когда бюджет меньше – стоит рассмотреть коробку робот.
Когда денег достаточно подойдет автомат, но мысленно стоит готовится, что на ремонт агрегата должна быть отложена некая сумма. Взамен владелец получит более удобное передвижение. Когда бюджет меньше – стоит рассмотреть коробку робот.
Оставить отзыв
Как правильно ездить на роботизированной коробке передач: особенности работы робота
, Статьи
Рассказываем о специфике использования робота в машине.
Роботизированная коробка передач — в простонародье просто робот — для большинства водителей мало чем отличается от традиционного автомата, рычаг которого для начала движения переводится в положения D (Drive) или R (Reverse). Но в то же время эти коробки устроены иначе. Поэтому владельцам машин с такой популярной в наши дни трансмиссией следует знать, как правильно ездить на роботе.
Как работает роботизированная коробка передач
По конструкции робот напоминает механику. Разница между ними в том, что у роботизированной коробки за управление переключением ступеней и смыкание/размыкание сцепления отвечает автоматика. То есть водителю не нужно выбирать рычагом нужную ступень и при этом каждый раз выжимать левую педаль. У машин с роботом, как и с автоматом, ее нет. То есть педалей на автомобиле с роботизированной коробкой всего две, а не три.
То есть водителю не нужно выбирать рычагом нужную ступень и при этом каждый раз выжимать левую педаль. У машин с роботом, как и с автоматом, ее нет. То есть педалей на автомобиле с роботизированной коробкой всего две, а не три.
Роботы бывают двух видов: с одним сцеплением (автоматизированные) и с двумя (преселективные). Первые проще, дешевле и конструктивно больше походят на механику, поскольку сделаны на ее основе и дополнены сервоприводами и управляющей электроникой. Они задумчивее и грубее в переключении ступеней, с ними машина дольше трогается с места, а смена передач в движении может происходить с «кивками» автомобиля. Однодисковые роботы, как правило, встречаются на недорогих моделях автомобилей из недалекого прошлого.
Преселективная коробка сложнее по конструкции. Она — как две механики в одном корпусе: одна с четными передачами, а другая с нечетными. Переключения в таком роботе происходят быстрее и без разрыва мощности, как в однодисковом, поскольку следующая передача в нужный момент уже готова включиться. Такой тип коробок передач распространен на машинах концерна Volkswagen, где он носит название DSG. Преселектив можно встретить на Porsche, «Шкодах» и Audi. А еще такие коробки используют фирмы BMW, Mercedes-Benz, Ford, Renault, Volvo, Kia, Hyundai и другие.
Такой тип коробок передач распространен на машинах концерна Volkswagen, где он носит название DSG. Преселектив можно встретить на Porsche, «Шкодах» и Audi. А еще такие коробки используют фирмы BMW, Mercedes-Benz, Ford, Renault, Volvo, Kia, Hyundai и другие.
Как переключать передачи на роботе
К роботизированным коробкам передач применимы все основные правила пользования автоматом:
-
Для начала движения при нажатом тормозе нужно включить режим D или R, а после остановки — выключить.
-
Не рекомендуется нажимать одновременно на газ и тормоз при выбранном режиме движения, чтобы избежать перегрузки трансмиссии и снижения ее ресурса.
-
Переключения между режимами D, R и P следует производить после полной остановки машины при нажатом тормозе, то есть когда сцепления полностью разомкнуты.
-
Избегайте резких стартов в режиме «газ в пол» и прочих «светофорных гонок», а также дрифта и езды с заносами, чтобы раньше времени не убить коробку.

-
Не стоит покорять бездорожье на машине без понижающей передачи. От пробуксовок на оффроуде у робота сильно изнашивается сцепление, а сам он перегревается.
-
Не переключайте робот в N для движения накатом, чтобы не подвергать сцепление ударным нагрузкам при последующем включении режима D.
-
По возможности избегайте буксировки прицепов или других автомобилей, чтобы не подвергать элементы робота повышенному износу. А если это все же необходимо, то двигайтесь плавно, без резких разгонов и торможений.
Как управлять роботизированной коробкой передач
Поскольку роботы конструктивно отличаются не только от привычного классического автомата, но и друг от друга, в их эксплуатации есть разного рода нюансы, о которых следует знать владельцам машин с такими коробками. Например, чтобы в автоматическом режиме однодисковый робот успевал переключать ступени и не пинался, а преселективный не путался в передачах, лучше ездить спокойно, плавно и не торопясь. Для агрессивной езды по этой же причине предпочтительнее ручной режим коробки, в котором можно щелкать ступени самостоятельно.
Для агрессивной езды по этой же причине предпочтительнее ручной режим коробки, в котором можно щелкать ступени самостоятельно.
У машин с однодисковым сцеплением, как правило, не предусмотрен режим автоматического включения стояночного тормоза при остановке либо он действует всего несколько секунд, чтобы водитель успел потянуть за рычаг между передними сиденьями. Поэтому стоять на светофоре и трогаться с места в горку с такой коробкой нужно как на механике — предварительно нажав тормоз или удерживая автомобиль на месте с помощью «ручника». Роботы изначально настроены на экономичный стиль езды, поэтому после первой они спешат скорее подоткнуть вторую передачу.
При толкании в заторах на небольшой скорости роботизированные трансмиссии то и дело переключаются между первой и второй ступенью, тем самым увеличивая нагрузку на свои элементы и больше нагреваясь. Да и сцеплению при этом приходится работать с пробуксовками. Чтобы наносить меньше вреда роботу и минимизировать дискомфорт для водителя и пассажиров от пинков коробки, в пробках лучше ездить в ручном режиме, выбрав и зафиксировав оптимальную для дорожной ситуации первую или вторую передачу.
Иван Титов
Читайте также
- Автомобили с пробегом продолжают дорожать, но рост цен замедлился
- Какими смартфонами пользуются автомобилисты в России
- Полный список автомобильных новинок месяца: их уже можно купить
- Топ товаров с «АлиЭкспресс» к предстоящему отпуску
- ГИБДД рассказала о новом дорожном знаке
Продолжение темы
Все новости29 июня 2022Как бороться с запахами в салоне машины: лайфхак от таксистов
6 июня 2022Как распознать, что на машине ездил лихач?
17 мая 2022Как увеличить клиренс автомобиля: 5 простых способов
2 мая 2022Что делать, если машина сломалась в дороге?
30 апреля 2022Куда поехать на шашлыки, чтобы не нарваться на штраф
чего не любят машины с роботами и вариаторами
16 сентября 2021 11:37 Иван Зенкевич Утро России
Минус автоматической коробки передач – это низкий КПД, что означает больший расход топлива перед другими типами трансмиссий, меньшая динамика автомобиля по сравнению с механической или роботизированной коробкой передач. Производители обычно выбора не оставляют, предлагая для конкретной модели лишь один вид автомата. Реже два. А надежность и долговечность любого варианта во многом зависит от нас.
Производители обычно выбора не оставляют, предлагая для конкретной модели лишь один вид автомата. Реже два. А надежность и долговечность любого варианта во многом зависит от нас.
Сегодня машин с различными типами автоматических коробок продается значительно больше, чем со старой доброй механикой. Что не удивительно – передвижение с автоматом куда комфортнее.
Давайте разберемся, какие у каждой коробки сильные и слабые стороны? И что предпочесть, исходя из условий эксплуатации? Правда, сразу оговоримся – производители обычно выбора не оставляют, предлагая для конкретной модели лишь один вид автомата. Реже два.
«Японцы» обычно оснащаются вариаторами, «немцы» – роботами. Все три типа у одной марки встречаются очень редко. На нашем рынке это, пожалуй, только KIA со своим бюджетным кроссовером Seltos.
Начнем с классического гидротрансформаторного агрегата. Это старая, проверенная и хорошо доработанная конструкция. Из чего следует надежность и ремонтопригодность. При должном обслуживании и не агрессивной манере езды можно пройти 200 и более тысяч километров без особых проблем. Позволяет автомат и в меру побуксовать. Недостатки тоже есть, но они не критичны.
Позволяет автомат и в меру побуксовать. Недостатки тоже есть, но они не критичны.
«Минус автоматической коробки передач – это низкий КПД, что означает больший расход топлива перед другими типами трансмиссий, меньшая динамика автомобиля по сравнению с механической или роботизированной коробкой передач», – перечисляет промахи АКПП продавец-консультант Николай Андриянов.
Вариатор – очень распространенный сегодня тип АКПП, во многом благодаря плавному разгону: ведь передач, а значит и переключений нет. Второй плюс – топливная экономичность. Но есть и слабые стороны.
«Вариаторная коробка требует к себе больше внимания, нежели чем автоматическая. При эксплуатации машины в городе замена масла требуется раз на 40 тысяч километров», – подчеркивает мастер-консультант слесарного цеха Андрей Золотарев.
Такая трансмиссия чувствительна к перегреву и перегрузу, не любит пробуксовок и резких остановок, например, при парковке «в бордюр». И, наконец, робот. Плюсы – экономичность и хорошая динамика.
Слабое место роботов – гидравлическая часть и система управления. Ремонт может уже потребоваться через 100 тысяч километров, а «удовольствие» это не из дешевых.
Какой вариант трансмиссии предпочесть – решать вам. Любите погонять или часто выбираетесь на бездорожье, значит нужен классический автомат.
Для легковушки и моноприводного кроссовера, который передвигается только по городу, вполне сгодится вариатор.
Робот универсален, но его главный минус – спорная репутация, что отражается в том числе и на стоимости авто на вторичном рынке. Не все хотят рисковать.
Впрочем, надежность и долговечность любого варианта во многом зависит от нас. Агрессивная манера езды и обслуживание «спустя рукава» быстро выведут из строя даже самую надежную конструкцию.
авто экономика машина/автомобиль покупка Иван Зенкевич автосервис автослесарь автоматическая коробка переключения передач/АКПП общество новости робот
Ранее по теме
Мойка самообслуживания: что делать и как экономить
Восемь железных советов при покупке подержанного авто
Нарушителей ночной тишины будут ловить шумомерами
Назван критерий, по которому Vesta лучше Polo, Creta и Coolray
Главный враг и симптомы «болезни» АКПП
Автомобильные фильтры – какие бывают и как часто их менять
Виды коробок передач автомобилей и их устройство.
 КПП робот что это? Чем отличается автоматическая коробка передач от робота
КПП робот что это? Чем отличается автоматическая коробка передач от роботаАвтоматические коробки передач скоро совсем вытеснят механические, но не все знают, а те кто знают — задаются вопросом, какие разновидности автоматических коробок существует и чем они отличаются? На самом деле их много и у каждой свои особенности, но сегодня мы рассмотрим два самых популярных типа КПП — это классический автомат и роботизированная механика .
Как отличить автомат от робота визуально
Если вы уже приобрели автомобиль или только собираетесь и не знаете какой автомат там стоит, то эти две коробки очень легко можно отличить друг от друга визуально. Просто посмотрите на кулису (рычаг переключения передач) если вы видите там, в самом верху, положение «P » — Паркинг, то это автомат, а если такого положения кулисы вы не видите, а есть только «N » — Нейтраль и «R » — Задняя, то это однозначно робот!
Принцип автоматической коробки
Автомат включает в себя два главных модуля: редуктор и гидротрансформатор . Функция первого – это осуществлять передачу усилия через систему шестеренок, которые могут находиться в зацеплении между собой в различных вариациях, благодаря чему это усилие изменяется. Второй обеспечивает плавное переключение скоростей и выполняет функцию, аналогичную сцеплению на механике.
Функция первого – это осуществлять передачу усилия через систему шестеренок, которые могут находиться в зацеплении между собой в различных вариациях, благодаря чему это усилие изменяется. Второй обеспечивает плавное переключение скоростей и выполняет функцию, аналогичную сцеплению на механике.
Такой тип коробки значительно упрощает управление, освободив водителя от необходимости постоянного обращения к педали сцепления, переключения передач рычагом, и контроля плавного трогания с места. За него это делает автоматика. В результате появляется больше возможностей контролировать ситуацию при движении на дороге.
При этом надежность гидротрансформатора как узла, аналогичного сцеплению в механической КПП будет выше, и сломать его из-за неумения пользоваться, как это делают неопытные водители, невозможно. За счет него нагрузка на силовой агрегат и ходовую часть снижается.
Скорости переключаются при оптимальных оборотах, за счет чего ресурс двигателя сохраняется. Большее количество ступеней передаточного числа позволяет экономнее расходовать топливо. Пассивная система безопасности не даст автомобилю покатится, стоя на уклоне.
Пассивная система безопасности не даст автомобилю покатится, стоя на уклоне.
Но кроме этих преимуществ, данный тип КПП имеет и некоторые недостатки. При езде проявляется меньшая динамика набора скорости в сравнении с механической трансмиссией. Топливо расходуется менее экономно в обратной зависимости от количества ступеней передач. Так, коробка с четырьмя ступенями будет самой неэкономичной.
Также силовой агрегат имеет меньший КПД из-за гидротрансформатора, на работу которого уходит часть мощности. Сам агрегат достаточно дорогостоящий, что заметно влияет на всю стоимость изделия. Недешевым будет его ремонт и обслуживание, при этом нужно учесть большой объем масла в устройстве и его немалую стоимость.
Особенности роботизированной коробки
Данный тип коробок делится на два подвида. В первом это практически механическая коробка, в которой установлено автоматическое управление. Контроль за переключениями выполняется электроникой. Следовательно, привычного сцепления тоже нет. Передачи могут переключаться автоматически и вручную, как на механике. В этих коробках крутящий момент прерывается, и при переключениях бывают провалы.
Передачи могут переключаться автоматически и вручную, как на механике. В этих коробках крутящий момент прерывается, и при переключениях бывают провалы.
Второй тип отличается большим совершенством в сравнении с предыдущим. Его устанавливают на спортивных машинах, принимающих участие в гонках. Их технические особенности заключены в двух системах сцепления, отвечающих за разные передачи. Благодаря этому, скорость переключения очень быстрая.
В данном типе КПП много слабых сторон, но при этом отмечается относительно малый расход топлива, который можно сравнить с механическими трансмиссиями. Такая коробка более дешевая не только сама по себе, но и при обслуживании, а также потребляет меньше расходных материалов. Ее вес уступает автоматическим коробкам. Она имеет хорошую динамику и удобные кнопки переключения, расположенные на руле.
Минусы такой трансмиссии заключаются в ее прерывистости работы, которые слышны при переключениях, а также существует задержка после включения самой передачи. При остановке рычаг КПП необходимо переводить на нейтральное положение. Все пробуксовки движения уменьшают ее ресурс, поэтому автомобиль с такой коробкой желательно использовать на хороших дорогах.
При остановке рычаг КПП необходимо переводить на нейтральное положение. Все пробуксовки движения уменьшают ее ресурс, поэтому автомобиль с такой коробкой желательно использовать на хороших дорогах.
В чём разница? Плюсы и минусы
- Плохая динамика разгона;
- Завышенный расход топлива;
- Высокая цена самого устройства и обслуживания;
- Уменьшение КПД из-за гидротрансформатора;
- Инерция при переключении передач.
Минусы Автомата:
- Менее плавное переключение даже в сравнении с автоматом;
- Задержка после включений передачи;
- Пробуксовки уменьшают ресурс коробки;
- Ручной перевод рычага нейтрального положения при остановке.
Минусы Робота:
Что выбрать?
Сравнительная характеристика обоих типов КПП не показывают однозначного преимущества какой-либо одной над другой. Иначе производители трансмиссий выпускали бы лучший вариант. Выбор типа коробки зависит от личных представлений водителя автомобиля о комфорте и удобстве вождения автомобиля, а также денежных средств, которые он готов на это потратить.
Можно только отметить, что автомат больше подойдет любителям плавной езды, а робот – предпочитающим более динамический стиль, и компромисс между качеством и стоимостью.
Современные автомобили оборудуются разными типами коробок передач и потребителю особенно при покупке своей первой машины бывает тяжело сделать правильный выбор среди этого разнообразия .
Поэтому в этой статье попробуем понять, чем отличается коробка автомат от робота, именно этот вопрос волнует многих будущих автовладельцев.
Отличие робота от автомата
Коробка автомат. Как вы знаете, в состав автоматической коробки передач входят два основных узла — это гидротрансформатор и редуктор. Гидротрансформатор обеспечивает плавное и безрывковое переключение передач, по сути, он работает вместо , которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определённого набора шестерёнок, они находятся в зацеплении и образуют несколько ступеней: 4, 5, 6 и даже 8.
Из-за особенностей конструкции, автоматическая коробка передач исходя от оборотов мотора и нагнетания масляного давления сама переключает ступени (скорости), без вмешательства водителя. Благодаря такому переключению скоростей, электроника используется по минимуму.
КПП робот что это? Если сказать просто, то на механическую коробку передач поставили блок управления, который состоит из гидропривода и сервопривода (электронный узел). Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Коробка робот
Принцип работы робота как у механики, только всё происходит автоматически — гидравлика с электронным управлением всё сделает сама.
Плюсы и минусы автомата и робота
Чтобы лучше понять, чем отличается автоматическая коробка передач от роботизированной, давайте рассмотрим их эксплуатационные характеристики.
1. АКПП значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Есть у автоматической коробки передач и минусы — это повышенный , особенно в городе и ремонт автомата, который иногда случается, выльется в приличную сумму.
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем у автомата. Расход топлива у автомобиля с коробкой роботом приравнивается к , а в условиях города даже ниже, что не может не радовать. Ещё, роботы кушают масла по меньше, чем автоматы.
Роботы передают крутящий момент от мотора к колёсам автомобиля без существенных потерь, чего не скажешь об автомате. Большой в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.
Есть у робота и минусы — это медленное переключение скоростей и толчки с рывками в работе коробки, это случается довольно часто, если водитель очень сильно давит на педаль газа. Также, в городской черте во время стоянок необходимо рычаг селектора ставить в положение «нейтраль».
Также, в городской черте во время стоянок необходимо рычаг селектора ставить в положение «нейтраль».
А зачем так делать, можете узнать в этом видео, где рассказано о коробке робот.
Подведём итоги, чем отличается автомат от робота:
- робот — это механическая коробка передач с блоком управления, автомату присуща своя конструкция;
- при переключениях передач автомат выигрывает у робота по скорости и плавности переключений;
- у робота есть ручное переключение, а у многих автоматов подобная функция отсутствует;
- коробка робот потребляет топлива и масла меньше, чем автомат;
- обслуживание и ремонт роботизированной коробки дешевле, чем автоматической коробки.
Заключение
. Моё мнение: робот — это тёмная лошадка, от которой можно ожидать неприятных сюрпризов. Я выбираю автомат, он изучен и предсказуем в работе, тем более, новые автоматические коробки с большим набором передач приближаются уже по к механике и также, эти автоматы могут подстраиваться под каждого водителя.
Сегодня количество модификаций и разновидностей автоматических растёт с каждым днём. Ещё совсем недавно автолюбители всего мира узнали о том, что существует стандартная АКПП с гидротрансформатором. Позже машины стали укомплектовывать И теперь появились роботизированные КПП. Многие ещё не доверяют этому свежему техническому решению. Так что лучше — «автомат» или «робот»? В чём различия между этими коробками, что выбрать рядовому автолюбителю?
Роботизированная КПП
Такая КПП или же «коробка-робот» — это не автомат.
На самом деле, это механическая трансмиссия, где функции отключения сцепления и переключения передачи проходят в автоматическом режиме. Название такой системы говорит о том, что водитель автомобиля и дорожные условия формируют лишь входные данные. А вся работа внутри КПП проводится при помощи электронного блока по определённым алгоритмам. Это главное отличие коробки: «робот» от «автомата» разнится этим в первую очередь.
«Робот» — это комфорт АКПП, высокая надёжность, а также экономия топлива — ведь он является механикой. При этом роботизированная коробка зачастую намного дешевле классических автоматических решений. Сегодня многие популярные и даже неизвестные оснащают свои авто именно такими установками. Уже есть производители, которые установили такие коробки на всю линейку: от бюджетных моделей до премиум класса.
Как устроена роботизированная КПП
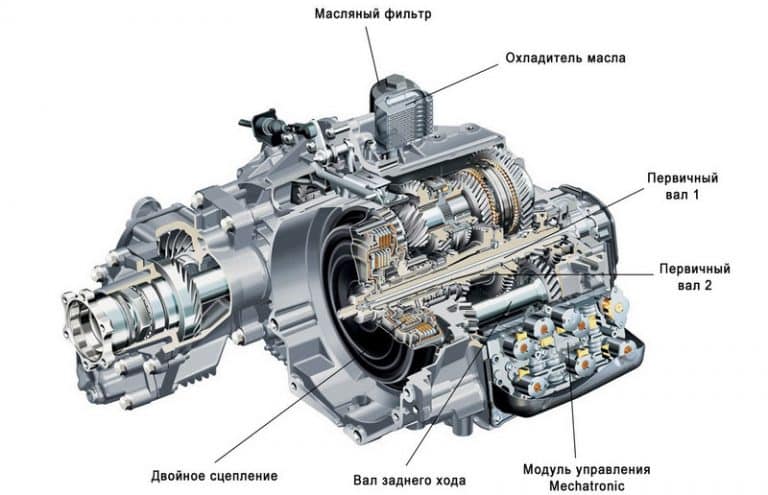
Чем «робот» отличается от «автомата»? Как минимум своим устройством. «Роботы» также могут отличаться между собой. Однако есть в этих узлах кое-что общее. Это МКПП, где переключением и сцеплением управляет электроника. В подобных решениях применяют фрикционную систему сцепления.
Она может быть как однодисковой, так и многодисковой. В современных КПП обычно применяют двойное сцепление. Это позволяет избежать потерь в мощности и динамике. В основе «роботов» лежит привычная механика. На производствах применяются уже готовые решения. К примеру, в роботизированных системах SpeedShift используется база АКПП 7G-Tronic от «Мерседес». Здесь просто вместо гидротрансформатора установили
Модель SMG от BMW — это шестиступенчатая механическая КПП с электрогидравлическим приводом сцепления. Так, что по технической части разница между «роботом» и «автоматом» — отсутствие гидротрансформатора и другая электроника. Вот и все отличия.
Привод роботизированных КПП
КПП-роботы бывают гидравлическими либо электрическими. Если модель имеет последний привод, тогда в качестве него используют сервомоторы и механизмы. Если он гидравлический, то работа осуществляется при помощи гидроцилиндров, которые управляются посредством электромагнитных клапанов. Специалисты и маркетологи называют эту систему электрогидравлическим приводом. Такими коробками оснащены некоторые модели Opel и Ford. Также может быть использован гидромеханический узел совместно с электрическим двигателем. Мотор в этом случае служит для перемещения основного цилиндра сцепления.
Электропривод отличается более медленной работой. Средняя скорость переключения составляет около 0,3-0,5 с. А потребление энергии — значительно меньше. Системы на гидро-приводе обеспечивают постоянное давление, а, значит, энергетические затраты будут выше. Однако, гидравлика гораздо быстрее. Подобные решения устанавливаются на спортивные автомобили из-за высокой скорости работы.
Привод и область применения
Электрические «роботы» применяются чаще на бюджетных моделях автомобилей.
Среди популярных коробок можно выделить: Allshift — Mitsubishi, Dualogic — Fiat, 2-Tronic — Peugeot. Гидравлику устанавливают на более дорогие модели.
Управление
Управляет робо-КПП специальная электронная система. В неё входят различные датчики, ЭБУ, а также исполнительные системы. Датчики наблюдают за основными параметрами. Ещё в отслеживается уровень давления, температура. Датчики отдают информацию в блок управления. На основании полученных сигналов, блок формирует управляющие импульсы на исполнительную часть по определённым алгоритмам. Управляющий блок находится в постоянном взаимодействии со многими узлами в авто.
В гидравлических системах, кроме всего этого, в блок управления также входит гидравлический элемент, обеспечивающий управление работой гидравлики. Это ещё одно отличие «робота» от «автомата».
Робот с двойным сцеплением
Главный недостаток подобных решений — долгое время срабатывания. Это приводит к рывкам и провалам в динамике.
Всё это в комплексе снижает комфорт управления. Но это было раньше. Сейчас эту проблему решили двумя сцеплениями, что обеспечило быстрое переключение без потерь в мощности. Ещё одно отличие «робота» от «автомата» следующее: при одной включённой передаче водитель может выбрать другую и, если необходимо, включить её без каких-либо перерывов. Такие системы называют переселективными коробками. Ни одно автоматическое решение пока не может такого предложить.
Ещё одно преимущество систем с двойным сцеплением — высокая скорость работы. Она здесь зависит лишь от скорости переключения муфт. Это применено в популярной DSG от «Фольксваген». Чем «робот» отличается от «автомата»? Стоит сказать про компактные размеры первого и малый вес. Это очень актуально для небольших малолитражных моделей авто. Кроме компактности, отмечают большое энергопотребление. Высокая скорость работы с постоянной отдачей крутящего момента даёт возможность получить хорошую разгонную динамику и экономию горючего.
Как работает «робот»?
Что касается работы, то здесь доступно два режима — автоматический и полуавтоматический. В первом случае ЭБУ по датчикам реализует заложенные алгоритмы. В каждой роботизированной коробке есть ручной режим. Он аналогичен работе Tiptronic на большинстве «автоматов». Этот режим позволяет последовательно переходить от низшей передачи к высшей при помощи селектора.
Коробка «робот» и «автомат»: разница
Если взглянуть на обе системы с точки зрения эксплуатации, то отличий немного. В случае с «автоматом» отсутствует управление сцеплением. Робот же им управляет, но полностью автоматически. «Робот» — это механика, автомат — гидромеханическая система. В этом и кроется отличие его от «автомата».
Важно брать во внимание разгон с опозданием. Жидкость в автоматической трансмиссии не может сразу справиться с воздействием ведомого вала. Они сцеплены не очень жёстко — это своего рода «предохранитель». Трансформатор будет вращаться свободно даже тогда, когда что-то заклинит. гидротрансформатора небольшой, поэтому часть мощности пропадает. Если двигатель отключён, «автомат» не может работать.
Плюсы и минусы
Чем «робот» отличается от «автомата»? Как минимум ценой. Среди достоинств можно выделить надёжную конструкцию.
В основе — механика, которая уже достаточно изучена и проверена. По своей надёжности РКПП значительно превосходит и вариатор, и «автомат». Также считается, что применение РКПП может способствовать меньшему расходу горючего. Так, некоторые владельцы заявляют об экономии до 30%. Роботизированная коробка потребляет меньшее количество масла. Так, здесь хватит 2-3 литров, а вариатор съест 7. Число передач равно количеству на механической трансмиссии.
Механика значительно проще и дешевле ремонтируется, хотя автолюбители пишут на форумах, что обслуживание достаточно дорогое. Но большую часть поломок можно выполнить своими руками, имея необходимый опыт. Также увеличен ресурс дисков сцепления. В условиях города водитель часто стоит в пробках, а на подъёмах функция ручного управления будет очень полезной. Среди недостатков — отсутствие возможности прошивки агрегата.
Скорость работы ниже, чем на автомате. В городе требуется переключаться на полуавтоматический режим. На подъёмах размыкается сцепление.
Визуальные различия
Если автолюбители не знают, как отличить «автомат» от «робота», то, выбирая автомобиль, стоит взглянуть на селектор. Если есть знак P, тогда это автомат. Если есть только N и R, тогда это «робот».
Какую трансмиссию выбрать?
Если сравнить плюсы и минусы, то ни одна трансмиссия преимуществ не имеет. Иначе производители бы уже выпускали самое лучшее решение. Выбор зависит больше от личных предпочтений. Трудно сказать, что лучше: «автомат» или «робот». Нужно отметить, что АКПП — это плавность, РКПП — динамика. Итак, мы выяснили, чем «робот» отличается от «автомата».
Коробка передач робот или автомат: что лучше
Если еще сравнительно недавно автолюбители при выборе автомобиля могли рассчитывать только на автомат либо механику, то сегодня диапазон выбора значительно расширился. С развитием автомобилестроения в обиход вошли трансмиссии нового поколения, такие как роботизированная коробка и вариатор. Чем отличается роботизированная коробка передач от автомата, и какая коробка лучше (автомат или робот) необходимо знать каждому покупателю автомобиля. От этого зависит выбор, который в итоге сделает водитель.
АКПП — устройство, характеристики, особенности
По статистике, около половины продающихся в настоящее время машин – с автоматической коробкой передач. Ее назначение – менять частоту и вращающий момент, передаваемый ведущим колесам, в более широком диапазоне, чем может обеспечить двигатель. Но разные конструкции коробок делают это немного по-разному.
Автоматическая коробка передач
Автомат – это такой вид трансмиссии, где выбор передаточного числа происходит автоматически, в зависимости от нескольких факторов. Автоматическими называют лишь те коробки передач, где присутствуют обязательно два конструктивных элемента: планетарная передача и гидротрансформатор. Трансформатор отвечает за передачу крутящего момента от двигателя, вращение передается за счет жидкости — масла.
Устройство автоматической коробки передач
Планетарная передача появилась в качестве конструктивного элемента еще в начале 20 века. Первый серийно выпускаемый автомобиль, Ford T, имел такой элемент в конструкции. Его изготавливали по всему миру с 1908 года почти двадцать лет миллионными сериями. Но еще в 1906 году начал выпускаться автомобиль Cadillac, с полностью автоматической передачей.
Первый автомобиль с планетарной передачей — Ford T
Планетарная передача напоминает по виду движение планет вокруг Солнца. Составные части этого механизма перечислены ниже:
- В центре редуктора – так называемое «солнце» или малое зубчатое колесо.
- Водило – рычажный механизм.
- Большое зубчатое колесо c внутренними шестеренками.
- Сателлиты – аналог планет Солнечной системы, зубчатые колеса, вращаются вокруг «солнца».
Устройство планетарной системы АКПП
Планетарная система – несколько планетарных передач. Гидротрансформатор передает крутящий момент, но здесь нет жесткой связи двигателя с коробкой, в отличие от механики. Это аналог сцепления в МКПП. Есть небольшая потеря мощности при передаче движения из-за отсутствия жесткой связи с двигателем, но за счет гидравлики ход более мягкий. Определенные шестеренки в планетарной системе блокируются, и получается понижающая, повышающая или прямая передача.
Плюсы коробки автомат
Когда приходится добираться на работу через пробки, удобнее использовать АКПП. Тогда водителю не приходится нажимать на множество рычагов, и управление не требует такой концентрации, как при эксплуатации механики. Ведь после нескольких часов в потоке машин, ноги устают, а потеря концентрации может привести к аварийной ситуации. Люди, для которых непостижима МКПП, выбирают автоматику, и к их числу относят себя многие из обучающихся. При этом срок службы у приведенных моделей одинаковый. Снижается и влияние на человеческий фактор, не нужно постоянно контролировать машину.
Передачи переключаются мягко, машина двигается без резких рывков. Коробка передач подстраивается под водителя, поэтому поездка комфортна, независимо от выбранной манеры езды. Диски сцепления и выжимной подшипник служат дольше, и эту особенность отмечают даже опытные шоферы, все жизнь пользовавшиеся МКПП. Автоматы начали производиться раньше, поэтому в их поведении меньше подводных камней. Постоянно принимаются меры по совершенствованию конструкции, в результате расход топлива снижается.
Минусы коробки автомат
За комфорт при поездке, мягкий разгон, приходится платить более высокой стоимостью КП и снижением КПД. Во время гидропередачи происходит рассогласование частот вращения турбинного и насосного колеса. Этот процесс именуют скольжением гидропередачи, оно присутствует при любом режиме эксплуатации трансмиссии. Но, если скорость постоянна, нет торможения и разгона, применяется блокирование гидротрансформатора. Гидравлический трансформатор исключается из цепи передачи крутящего момента. Двигатель соединяется с валом КП напрямую.
АКПП в разрезе
В автосервисе придется оставить немалую сумму, если что-то сломается. Причина этого — сложность механизма. Если сядет аккумулятор, нельзя будет завести машину народными методами. С МКПП можно просто толкнуть авто, а автоматическая коробка при использовании такого метода сломается. Автоматы в бюджетных автомобилях могут с задержкой реагировать на команды. Решение принимает система, а не человек, поэтому контролировать машину труднее.
Автовладельцу придется проявлять осторожность при вождении. В холодное время года на снегу часто приходится буксовать, чтобы пройти сложный участок. Когда железный конь укомплектован АКПП, такие манипуляции приводят к ее перегреву. Если продолжать в том же духе, машина быстро сломается.
Управляемость с АКПП зимой чуть хуже, чем на механике
Вывод следующий — управляемость зимой хуже, чем летом, особенно при поездках за город. АКПП больше подходит для спокойных условий города, а не гонок по пересеченной местности. В случае поломки, нельзя отбуксировать машину, придется заплатить за эвакуатор. Нельзя резко трогаться с места, переключаться в режим паркинга или неаккуратно парковаться, иначе придется ремонтировать устройство раньше положенного срока.
Роботизированная коробка передач
Работает по такому же принципу, что и механическая, имеет схожую конструкцию с шестеренками. Но разобщение коленвала мотора с силовой передачей транспортного средства и переключение шестерен в коробке осуществляется автоматизированно. Устройством управляет электроника, а автолюбитель лишь подает информацию на вход.
Роботизированная коробка передач
Управление осуществляется электронным блоком с сервоприводами или актуаторами, которые бывают двух видов — гидравлические и электромоторы. Когда исполняющим механизмам дается команда для переключения, один актуатор выжимает сцепление. Другой — включает необходимую скорость, перемещая синхронизаторы.
Гидравлический привод стоит дороже, и устанавливают его только на автомобили представительского класса или спортивные болиды. Эксплуатация предполагает использование тормозной жидкости. Она находится под давлением и ускоряет процесс переключения до 0,05 сек. Поэтому гидравлику выбирают гонщики и стритрейсеры. Электропривод применяется чаще, так как стоит дешевле. Но задержка переключения составляет десятые доли секунды, что ощущается в момент разгона.
Слева — гибравлический привод, справа — электропривод
Есть два рабочих режима коробки — автоматический и ручной. В первом случае компьютер посылает приказ сменить передачи на основе собранных данных различных систем. Сюда относится скорость движения, количество оборотов двигателя и прочие показатели. Если активирован ручной режим, человек подает команды, используя рычаги управления — лепестки под рулем и селектор КПП. Автолюбитель сам производит регулировку селектора и устанавливает ограничение на смену передач роботом.
Подрулевой лепесток для переключения скоростей
Чтобы до конца понять, как работает роботизированная коробка, стоит рассмотреть ее конструкцию. Устройство идентично МКПП. Она состоит из корпуса, называемого картером. Внутри находятся валы, расположенные параллельно друг другу. На них крепятся шестеренки, попарно находящиеся в зацеплении. Коробка бывает двухвальной либо трехвальной.
Устройство роботизированной коробки передач
Крутящий момент передается от мотора на первичный, также называемый ведущим, вал. Преобразованный момент направляется на ведущие колеса со вторичного — ведомого. Разница между валами заключается в том, что на вторичном шестерни могут свободно вращаться, а на ведущем крепятся жестко. Часто ведомый делят на два, чтобы уменьшить его длину и соответственно, размеры коробки. Чтобы крутящий момент не подавался на колеса, выбирают положение «нейтраль». В таком режиме на ведомом вале свободно прокручиваются шестерни.
При использовании МКПП перед сменой передачи требуется нажать на педаль сцепления. В противном случае первичный вал не отсоединится от двигателя автомобиля. Электроника, встроенная в роботизированные модификации, снимает лишнюю нагрузку с водителя. Поэтому во время вождения человеку не нужно нажимать ногой на педаль сцепления.
После срабатывания сцепления, при помощи рычага коробки передач водитель перемещает синхронизаторы. Они представляют собой особые механизмы, выравнивающие частоту вращения ведомого вала и активируемой шестерни. Когда срабатывает сцепление, вращающий момент с нужным коэффициентом переносится на ведомый вал. Далее он подается на главную передачу и колеса.
Делаем выводы
Какая же коробка передач лучше? С точки зрения комфорта, несомненно выигрывает АКПП, хотя разработчики робота и пытались отвоевать эту позицию у автоматической коробки.
А вот более экономически выгодным будет робот. Стоимость самой коробки, ее обслуживание и ремонт обойдутся дешевле. Да и топливо с маслом автомобиль с роботизированной коробкой потребляет меньше, чем с автоматической.
Теперь надежность. Здесь можно поспорить. Ни ту, ни другую коробку нельзя назвать абсолютно надежной в сравнении с той же механикой. Непонятно также, как обе коробки поведут себя в тяжелых условиях. Но АКПП хотя бы более предсказуема, чем робот, от которого неизвестно чего ожидать.
Поэтому какая коробка передач будет лучше, каждый водитель решает сам, исходя из своих представлений об удобстве и комфорте управления автомобилем. Стоит отметить, что робот можно легко принять за автомат: зачастую отсутствие педали сцепления как у автоматической, так и у роботизированной КПП приводит неопытных водителей в замешательство. Поэтому необходимо внимательно изучать характеристики выбранного автомобиля в процессе покупки.
Плюсы роботизированной коробки передач
Первые роботы были представлены, как изобретение, соединившее в себе положительные качества механики и автомата. Новинки с электронным блоком управления унаследовали от МКПП прочную конструкцию. При поломке нетрудно найти мастера, который произведет ремонт.
Улучшенные механизмы также отличает низкий расход топлива и масла в сравнении с АКПП. В сравнении со многими гидротрансформаторными, роботизированные модификации расходуют на 30% меньше горючего.
Вариаторные и гидротрансформаторные модели имеют более сложную конструкцию и чаще ломаются. Отличительное свойство роботов — это более простое управление, чем при эксплуатации механики.
К преимуществам роботизированных устройств относят и комфорт во время поездки. Для избавления от рывков в современных моделях устанавливаются два независимых сцепления. Такие коробки называют преселективными, у них переключение скоростей занимает 0. 02 секунды. Они позволяют при включенной передаче активировать следующую ступень, не делая перерыва в работе и сохраняя тягу. Комфорт во время поездки и улучшение динамики достигается за счет уменьшения момента разрыва мощности.
Двухдисковое сцепление в коробке передач-роботе
У робота может быть до 10 скоростей, как в недавно представленном компанией Volkswagen авто. Если выбрать МКПП, максимальное количество передач — всего 8. Аппараты с электронным блоком управления изобретены около 20 лет назад и запущены в массовое производство. Сейчас можно встретить как бюджетный седан, так и тюнингованный спорткар с роботизированной КПП.
Дополнительные нюансы
Коробка передач робот (что это такое, читайте выше) и автомат имеют много сходств. Обе они пользуются большим спросом. Робот считается доработкой механической трансмиссии. Благодаря блоку управления и другим особенностям с данной коробкой передач можно работать как с механикой, так и с автоматом. При этом конструкция будет намного проще, чем во втором варианте.
Также роботы больше выдерживают нагрузки, за ними не нужен особый уход. Автомобиль с такой коробкой будет потреблять меньше топлива, чем та машина, которая работает на автомате. Более того, водителям не приходится затрачивать время на переключение передач, если сравнивать с гидравлическим приводом.
В статье мы обсудили, как работает коробка передач, что за механизм ею руководит, какие особенности она получила. Таким образом, любой может заметить, что такой вид трансмиссии подойдет для любителей механики и для фанатов автомата. В любой момент ее можно переключить из механики в автомат или воспользоваться роботом. Но из-за того что данное изобретение относительно новое, то и покупать машину с наличием такой детали многие боятся. Однако, судя по отзывам, не стоит опасаться каких-либо непредвиденных обстоятельств, так как данное устройство максимально надежное.
Минусы роботизированной коробки передач
В отличие от живого водителя, робот не может почувствовать момент, когда смыкаются диски, и плавно переключить скорость. Поэтому движение может происходить с рывками. Чтобы сделать его более плавным, создатели роботизированных КП приняли меры. В улучшенных модификациях во моменты смены передачи электроника на некоторое время разрывает поток мощности, передаваемый к колесам от мотора. Поэтому исчезают неприятные провалы во время набора скорости.
Принцип работы роботизированной коробки передач
Такие конструкции меньших габаритов, с более плавным ходом, но они будут стоить дороже. В них устанавливается одиночный электромагнитный сервопривод. Механизм выбора передачи срабатывает быстрее, а время разрыва мощности сокращается.
Роботы требуют соблюдения правил эксплуатации. Водителю не следует сильно давить на газ, а при торможении рекомендуется нажимать на педаль посильнее. При резком наборе или буксовании коробка передач может выйти из строя. Необходимо следить, чтобы при передвижении не перегревалось сцепление.
Автоматика подстраивается под манеру езды владельца авто. В прошивке блока управления робота устанавливается режим, поддерживающий только один стиль. Еще один минус — для гонок на трассе придется покупать модификацию с гидроприводом, а стоить она будет намного дороже. Ремонт МКПП обойдется дешевле, и при поездках по изношенному дорожному покрытию такой механизм прослужит дольше. Электронный механизм может выйти из строя после неправильно выполненной перепрошивки или Чип-тюнинга. В худшем случае придется менять и сцепление.
Вопросы обслуживания
Чтобы роботизированная трансмиссия исправно работала как можно дольше, нужно вовремя выполнять диагностику и обслуживание этого агрегата. Кроме того, робот требует бережной езды на автомобиле — агрессивный стиль не его конек.
Обслуживание узла должно выполняться не реже чем через каждые 40-50 тысяч км пробега. При этом в соответствии с регламентом проводится чистка контактов либо они меняются на новые элементы. Также меняется и сам
Кроме самой замены масла, требуется еще выполнить адаптацию точки захвата со сцеплением. Процедура эта несложная и обеспечивает корректировку агрегата и износившегося узла сцепления. В будущем это продлит ресурс агрегата, добавив толику комфорта управлению автомобилем.
Исключением к проведению процедуры адаптацию является появление писка сцепления. В этом случае операция е принесет результата либо отсрочить поломку на неопределенный срок. Для любителей экономить выходит один — замена узла.
Чтобы выявить ту или иную неисправность коробки передач стоит посетить специализированный автосервис, который работает именно с роботизированной трансмиссией. Без необходимого оборудования и специалистов диагностику на профессиональном уровне невозможно выполнить. Ровно, как и устранить обнаруженные проблемы.
Любая попытка заняться самостоятельным ремонтом обернется опасными последствиями. Нельзя исключать вероятность полного его выхода из строя. Поэтому лучше все же обратиться к мастерам своего дела, нежели пытаться исправить все своими силами. Одного только знания, как устроен подобный механизм недостаточно — нужны соответствующие умения и навыки. Только так можно решить любую возникшую проблему, независимо от ее сложности.
Что лучше — роботизированная или автоматическая КПП
Автомат или робот – выбор непрост, а ведь есть еще и вариатор. Но вариатор не переключает скорости, так как там они изменяются плавно. То есть, он не является устройством переключения скоростей. А робота с автоматикой вполне можно сравнить по материальным параметрам, динамике разгона, поведению в неблагоприятных условиях — при пробуксовке, маневрировании на сложном дорожном покрытии.
Если рассматривать комфортность поездки, на первом месте коробка-автомат. Когда важнее стремиться к выгоде, лидирует роботизированная КП, у которой меньше расход топлива и масла. Но АКПП считают более предсказуемой при поездке. На вид при покупке может быть трудно оценить, робот или автомат перед будущим владельцем. В обоих вариантах отсутствует педаль сцепления, поэтому нужно заранее поинтересоваться, какой коробкой оснащена выбранная модель.
Ниже можете ознакомиться с таблицей сравнения АКПП и роботиированной КПП.
| АКПП | Роботизированная КПП | |
| Плюсы | Плавный разгон и движение | Конструкция проще, чем у АКПП |
| Простота управления машиной | Экономия топлива и более высокий КПД по сравнению с АКПП | |
| Не нужно постоянно заменять сцепление | Ремонт и обслуживание дешевле ,чем у АКПП | |
| Минусы | КПД ниже, чем у робота | Движение рывками при старте и переключении передач |
| Выше расход топлива | Медленнее переключаются передачи | |
| Высокая стоимость, в том числе ремонта | Непредсказуемость поведения в тяжелых дорожных условиях |
Преимущества и недостатки трансмиссий
Чтобы окончательно сделать выводы о том, что лучше: робот или автомат, стоит проанализировать положительные и отрицательные стороны каждой из трансмиссий.
Плюсы и минусы АКПП
Сравнительная характеристика преимуществ и недостатков автоматики представлена далее.
| Преимущества | Недостатки |
|
|
Рекомендуем: Из чего состоит и как работает сцепление автомобиля?
Плюсы и минусы РКПП
На очереди анализ преимуществ и недостатков роботизированных трансмиссий.
| Преимущества | Недостатки |
|
|
Подведем итоги
Невозможно сказать, какая система лучше – автоматическая или роботизированная. Если бы такой вывод возможно было сделать для всех машин, производители уже давным-давно выпускали КП одного типа. При приобретении авто нужно учесть следующие факторы:
- На каких дорогах предполагается ездить – городских или загородных. Для загруженных улиц лучше АКПП, а при поездках по трассам подойдет и робот, так как не придется все время разгоняться и тормозить.
- Имеет ли значение расход топлива — у АКПП он несколько больше.
- Рекомендации уже опробовавших данную коробку.
- Цена АКПП, а также ее ремонт, дороже роботизированной.
- Ездить с АКПП комфортнее и водителю, и пассажирам, ведь нет резких толчков при разгоне.

Учтя все рекомендации, а также финансовые возможности, выбрать будет несложно.
4.2/5 — (4 голоса)
Выводы
Некоторые результаты измерений:
| Параметры | Автомобили | ||||
| Lada Granta Cross 1.6 АМТ | Hyundai Solaris 1.6 AT | Renault Logan Stepway 1.6 CVT | Skoda Rapid 1.4 TSI DSG | ||
| Максимальная скорость, км/ч | 177,0 | 198,3 | 165,2 | 200,0 | |
| Время разгона, с | 0-50 км/ч | 4,7 | 3,9 | 4,2 | 3,5 |
| 0-100 км/ч | 13,2/13,6* | 10,9/11,9* | 12,1/13,4* | 9,3/9,7* | |
| 0-150 км/ч | 33,6 | 24,8 | 35,5 | 21,1 | |
| на пути 400 м | 18,9 | 17,7 | 18,5 | 16,9 | |
| на пути 1000 м | 34,6 | 32,2 | 34,2 | 30,7 | |
| 60-100 км/ч (D) | 7,2 | 5,8 | 7,4 | 4,9 | |
| 80-120 км/ч (D) | 8,6 | 7,4 | 9,7 | 6,6 | |
| Выбег, м | с 50 км/ч | 646 | 740 | 662 | 633 |
| 130-80 км/ч | 888 | 1095 | 890 | 1016 | |
| 160-80 км/ч | 1329 | 1646 | 1331 | 1541 | |
| Расход топлива, л/100км | 9,9 | 9,2 | 9,5 | 8,5 |
* Разгон с двух педалей/разгон с переносом ноги (ESP и кондиционер включены)
Хотите удобства управления тягой в сочетании с высокой надежностью и приемлемой экономичностью? Выбирайте старую добрую гидромеханику с числом передач не менее шести — альтернативы которой так и не придумано. А какую трансмиссию выбрали бы вы?
- Тест-драйв Lada Vesta с вариатором Jatco и двигателем Renault-Nissan
- Тест-драйв Lada XRAY Cross с вариатором Jatco и двигателем Renault-Nissan
Ключевые слова: вариатор | коробка передач лада веста | коробка передач lada xray | коробка передач лада гранта | коробка передач лада калина | коробка передач лада приора
117
5
Обнаружили ошибку? Выделите ее и нажмите Ctrl+Enter..
Что такое робот, АКПП и вариатор: в чем отличия
— Реклама —
Обычно при выборе автомобиля для покупки будущий владелец обращает внимание на тип и мощность двигателя, привод, дизайн кузова и салона, конечно же, а также на тип коробки передач. И здесь многие совершают распространенную ошибку, думая, что все коробки передач делятся всего на два типа – «механика» и «автомат», хотя на самом деле это не совсем так. Сегодня мы подробно рассмотрим все современные типы коробок передач, изучим их механику работы, а также обозначим плюсы и минусы каждого решения. Это полезно как для общего развития, так и для потенциального выбора лучшего варианта.
⚠️ Важно: о принципе работы МКПП мы сегодня говорить не будем, так как сама МКПП давно себя изжила и постепенно уступает рынок более современным решениям.
Как работает роботизированная коробка передач
— Реклама —
Начать стоит, пожалуй, с роботизированной коробки передач — МКПП или, в народе, «робот». Этот тип коробки передач можно разделить на модели с одним и двумя сцеплениями. Собственно, робот с одним сцеплением — это самая обычная «механика», только вместо водителя за выжим сцепления и переключение передач отвечает гидравлический или электрический привод, а система управления выбирает нужную передачу. Такая конструкция получается недорогой и неприхотливой, но не очень удобной в использовании — электроника не всегда обеспечивает плавность и правильно подбирает момент переключения.
Решением этих двух проблем стало появление механических коробок передач с двумя сцеплениями — так называемых преселективных роботов. Конструктивно в такой трансмиссии объединены две механические коробки, одна с четными ступенями, а вторая с нечетными. На практике, пока автомобиль стоит на четной передаче, следующая нечетная передача уже включена на второй передаче, и для плавного и быстрого переключения системе достаточно лишь выжать сцепление. Наиболее распространенной коробкой передач с двойным сцеплением является DSG от Volkswagen.
— Реклама —
✅ Преимущества:
- МКПП дешевле «автомата»;
- относительно простая в ремонте и обслуживании коробка;
- обеспечивает более динамичное ускорение и ускорение;
- более экономно расходует топливо;
- плавное переключение передач (модели с двойным сцеплением).
❌ Недостатки:
- боится плохих дорог – на ровном асфальтовом покрытии лучше эксплуатировать МКПП;
- проскальзывание приводит к быстрому износу деталей.
Как работает АКПП
Эта коробка работает совсем не как «механика» или «робот» — здесь вместо обычного сцепления установлен гидротрансформатор, обеспечивающий плавную передачу крутящего момента… , коробка передач является базовым элементом АКПП – именно в ней спрятаны 4, 5, 6, а иногда и 8 и более ступеней. Соответственно, по мере разгона автомобиля система управления подает сигналы гидравлике, и «автомат» переключается на повышенную или пониженную передачу без какого-либо участия водителя.
Инженеры решили не останавливаться на обычном «автомате» — уже много лет на рынке присутствует коробка передач с функцией «типтроник», которая позволяет переключать передачи в ручном режиме при движении в АКПП.
✅ Преимущества:
- «автомат» чрезвычайно прост в использовании;
- плавное переключение передач без рывков;
- современные АКПП способны подстраиваться под манеру вождения своего владельца;
- если ехать без резких рывков и торможений, то убить «автомат» практически невозможно.
❌ Недостатки:
- АКПП значительно удорожает сам автомобиль;
- «автомат» дороже в обслуживании;
- необходимо полностью менять трансмиссионную жидкость каждые 30-50 тысяч километров.
Принцип работы вариатора
Конструкция вариатора на самом деле довольно сложная и дорогая в производстве, но все же можно кратко описать механизм работы – внутри корпуса расположены два вала (входной и выходной (или ведущий и ведомые)), на которых установлены конусообразные диски. Они образуют шкив переменного диаметра, в котором ремень (или цепь) действует как трансмиссия. Собственно, сдвигая диски относительно друг друга, можно менять передаточное число — ступенчатого переключения в данном случае нет. Соответственно, никаких рывков при переключении «передач» у вариатора нет, так как сами передачи, по сути, тоже отсутствуют. Хотя, конечно, стоит такая система немало и требует постоянного контроля за трансмиссионной жидкостью.
✅ Преимущества:
- нет переключения передач в привычном понимании – езда максимально плавная;
- автомобиль с вариатором не катится по наклонным поверхностям.
❌ Недостатки:
- ресурс ремня (цепи) – примерно 100 тыс. км пробега;
- нужно постоянно следить за трансмиссионной жидкостью;
- стоит довольно дорого;
- вариатор быстро перегревается при езде по бездорожью.
На любой вкус и цвет
Нельзя сказать, что тот или иной редуктор хуже или лучше – это просто разные механизмы с определенными преимуществами и недостатками, которые лучше подходят для конкретных задач. Например, если человек понимает, что за год он преодолевает внушительные расстояния и не планирует через год-два менять машину, то можно смело брать «робота» — дешевле его обслуживать и ремонтировать. Если проезжать до 5 тысяч километров в год и не выезжать за черту города, то можно взять «автомат» — он мягче, местами комфортнее, но, конечно, дорог в обслуживании и ремонте. Вариатор, конечно, тоже отлично справляется с поставленной задачей, но нужно понимать, что за плавное переключение передач придется заплатить высокую цену, плюс брать что-то крупнее кроссовера с вариатором точно не стоит( если это не Субару).
Источник: Корзина
— Реклама —
Автоматическая коробка передач ||Выбор места онлайн
Предоставлено IFR
На следующей неделе не будет недостатка в решениях для робототехники и автоматизации, так как десятки тысяч людей со всего мира приедут на выставку Automate в Чикаго.
Так что самое время взглянуть на то, как робототехника проникает в каждый сектор промышленности и во все регионы, согласно отчету World Robot Statistics 2014, опубликованному в конце января базирующейся в Германии Международной федерацией робототехники (IFR). на следующей неделе в Чикаго также пройдет Международный симпозиум по робототехнике.
Результат обновления? Китай, далеко не отстающий, когда дело доходит до производства, только начинает применять робототехнику в этом производстве.
«К 2017 году на производственных предприятиях Китая будет работать больше промышленных роботов, чем в Европейском союзе или Северной Америке», — говорится в отчете IFR. «Количество операционных единиц там удвоится с сегодняшних 200 000 до более чем 400 000. Для сравнения: в Северной Америке число вырастет примерно до 300 000 — при этом 340 000 прогнозируются для пяти крупнейших экономик Европы».
Предоставлено IFR
Еще один роботизированный измеритель плотности. По данным IFR, в настоящее время в Китае на 10 000 занятых в обрабатывающей промышленности приходится всего 30 промышленных роботов. Плотность Японии в 11 раз больше, Германии — в 10 раз, а Северной Америки — в пять раз.
«Автоматизация производственных предприятий в Китае только началась», — сказал Пер Вегард Нерсет, управляющий директор ABB Robotics, в отчете IFR. «Как первый иностранный производитель роботов, приехавший сюда, мы наблюдали за рынком и развитием событий в течение многих лет. Мы стали свидетелями быстрого, почти взрывного роста за последние два или три года, превзойдя даже наши ожидания». Kuka и два японских производителя роботов теперь также имеют собственные локальные производственные площадки. Китайское правительство одновременно продвигает роботизированные исследования.
Пер Вегард Нерсет,
Управляющий директор,
ABB Robotics
Одной из крупнейших инвестиций в производство робототехники, отслеживаемой базой данных новых заводов Site Selection с начала 2013 года, был завод Yaskawa Electric Corp. стоимостью 40 миллионов долларов в Чанчжоу летом. 2013. Среди прочего, Yaskawa в 2013 году наладила стратегическое партнерство с Argo Medical Technologies, базирующимся в Массачусетсе производителем отмеченной наградами экзоскелетной системы ReWalk для паралича нижних конечностей, впервые описанной в Site Selection в ноябре 2012 года.
Немецкая компания Dürr объявила в этом месяце, что за последние три года она инвестировала более 70 миллионов евро в свои объекты по всему миру, в том числе в новый учебный центр, который откроется в ближайшие несколько недель в Ченнаи, Индия, и в объекты в Германии и недалеко от Турина, Италия. Более 70 процентов от общего объема инвестиций направляется на строительство двух крупных заводов в Китае и США.
«В Шанхае-Цинпу компания строит офисное здание, сборочный цех для прикладных технологий, а также учебные и испытательные центры», — говорится в сообщении компании. «Этот кампус будет запущен в 2017 году. Он будет расположен рядом с заводом по производству систем окраски и окончательной сборки, который открылся в 2012 году. Это означает более короткие расстояния для 850 сотрудников, которые в настоящее время находятся там. для клиентов будет еще лучше, так как их сотрудники смогут посещать учебные мероприятия в Dürr в Цинпу, а не лететь в Германию. Они также смогут следить за этапом предварительного ввода в эксплуатацию и тестировать новые процессы на месте».
В сентябре 2013 года компания Dürr открыла новый машиностроительный завод в Шанхае. Производственно-офисный комплекс в районе Баошань объединяет всю китайскую деятельность подразделения измерительных и технологических систем, в котором работает около 600 сотрудников под эгидой Schenck Shanghai Machinery Ltd. На своей базе в Баошань Группа занимается технологиями балансировки, очистки и наполнения. бизнес, а также тестирование и сборка продукции в Китае и Юго-Восточной Азии.
Компания Dürr инвестирует в предприятия по всему миру, в том числе в свою итальянскую дочернюю компанию CPM, которая переоборудовала свой завод в Бейнаско недалеко от Турина. Над новыми офисами в техническом центре установлена система с двумя тележками.
Предоставлено Dürr
С 2016 года все предприятия Dürr USA, расположенные в настоящее время в районе Детройта, будут объединены под одной крышей в Саутфилде, штат Мичиган. Около 500 сотрудников переедут в новые помещения из Оберн-Хиллз, Плимута и Уиксома.
«Консолидация упростит деятельность Dürr в Северной Америке для клиентов», — говорится в сообщении компании. «Еще одним преимуществом является хорошо оборудованная площадка для тестирования продукции и обучения. Около 25 процентов из 21 000 квадратных метров [226 050 квадратных футов] полезной площади предназначено для гибкого сборочного цеха. технологии балансировки, наполнения, очистки и тестирования
North American Upswing Too
Заказы и поставки роботов в Северной Америке установили новые рекорды в 2014 году, согласно отчету, опубликованному в феврале Ассоциацией робототехники (RIA).
Всего в 2014 году у североамериканских компаний было заказано 27 685 роботов на сумму 1,6 миллиарда долларов, что на 28 процентов больше, чем в 2013 году, и на 19 процентов в долларах. отгружено покупателям из Северной Америки в 2014 г. Отгрузки выросли на 13% в единицах и на 6% в долларах по сравнению с предыдущими рекордами, установленными в 2013 г.
По оценкам RIA, около 230 000 роботов в настоящее время используются на заводах в США, что ставит США на второе место после Японии по использованию роботов.
Автомобильная промышленность была основной движущей силой роста в 2014 году: заказы на роботов увеличились на 45 процентов в годовом исчислении. Неавтомобильные отрасли также показали хорошие результаты в течение года, увеличившись на 7 процентов по сравнению с 2013 годом. «Выдающимися неавтомобильными отраслями в 2014 году с точки зрения роста заказов были пластмассы и резина (25 процентов), полупроводники и электроника (21 процент) и металлов (16 процентов)», — сообщает РИА. Роботы для дуговой и точечной сварки были самыми быстрорастущими сферами применения, за которыми следовали сборка и погрузочно-разгрузочные работы. По оценкам RIA, около 230 000 роботов в настоящее время используются на заводах в США, что ставит США на второе место после Японии по использованию роботов.
Заказы на роботов в неавтомобильной промышленности в 2014 году выросли на 7 процентов по сравнению с 2013 годом. Здесь робот Kawasaki помогает упаковывать мед.
Предоставлено IFR
Джефф Бернстайн, президент RIA, отметил, что RIA и его родительская группа, Ассоциация продвижения автоматизации, видят влияние роста спроса на автоматизацию на таких мероприятиях, как предстоящая выставка Automate 2015. «За шесть недель до конца выставки Automate 2015 выставочная площадка уже более чем на 70 процентов больше, чем на нашем мероприятии 2013 года», — сказал он в феврале. «Этот рост объясняется тем, что ведущие компании по автоматизации обращаются к малым и средним клиентам, многие из которых только сейчас начинают изучать автоматизацию».
Как недавно сообщил Тим Эппель из The Wall Street Journal, сообщество венчурного капитала также обращает на это внимание. Блогер по робототехнике Трэвис Дейл в январе сообщил, что венчурное финансирование робототехники в 2014 году увеличилось более чем на 36 процентов по сравнению с 2013 годом и составило 341,3 миллиона долларов, причем лидируют приложения для дронов и медицинских роботов.
Среди корпоративных инвесторов, отслеживаемых Site Selection за последние два года, находится Genesis Systems Group, один из крупнейших в Северной Америке интеграторов робототехники, который в декабре 2013 года отметил свое 30-летие в бизнесе, объявив о капитальных вложениях в размере 4,6 млн долларов США, которые добавили рабочие места и позволило компании производить больше своей продукции на своей базе в Давенпорте, штат Айова, в районе метро Quad Cities. Ремонт здания площадью 61 000 кв. футов. В здании площадью 5 667 кв. м потребовалось немедленное создание еще девяти рабочих мест, которые должны были быть добавлены к фонду заработной платы, составляющему 163 человека, с дополнительными мощностями, доступными для будущего роста.
«Quad Cities — идеальный центр для расширяющегося многонационального предприятия Genesis, — сказал Джоэл Лоренцен, президент и главный исполнительный директор Genesis Systems Group, во время объявления. — Наша рабочая сила — лучшая в мире для того, что мы делаем».
«Quad Cities имеет богатое наследие передового производства и инноваций, и работа, которую делает Genesis Systems Group, продолжает укреплять репутацию региона как центра передовых производственных инноваций», — говорит Тара Барни, генеральный директор Quad Cities Chamber, которая начал работать с компанией в 2012 году в рамках информационно-пропагандистской программы Business Connection: «Сотрудники Палаты вместе с сотрудниками Управления экономического развития города Давенпорт и штата Айова тесно сотрудничали с Genesis Systems Group для продвижения этого проекта».
Местная комиссия по предпринимательской зоне города Давенпорт одобрила заявку Genesis, что позволило подать заявку в штат Айова. Genesis Systems Group получила от штата Айова инвестиционный налоговый кредит в размере 162 600 долларов США, подлежащий амортизации в течение пяти лет.
Amada America в начале прошлого года инвестировала 14 миллионов долларов в свой Amada Solution Center в Шаумбурге, штат Иллинойс, высокотехнологичный центр площадью 133 000 кв. футов. Объект площадью 12 356 кв. м, предназначенный для демонстрации клиентам линейки лазерной резки, роботизированной гибки и других решений для производителей. Инвестиции поступили через год после открытия нового торгового центра площадью 180 000 кв. футов. Завод по производству лазеров (16 722 кв. м) в Бреа, Калифорния, февраль 2013 г. Созданный по образцу крупнейшего в мире завода по производству лазеров в Фудзиномии, Япония, завод станет одним из основных производственных предприятий Amada.
По состоянию на эту неделю Amada имеет более 30 вакансий в Соединенных Штатах, в том числе несколько вакансий в области сварки, механической обработки и производства на предприятиях в Шаумбурге и Бреа.
Dürr USA планирует переехать в новый кампус в Саутфилде, штат Мичиган, в начале 2016 года.
Изображение предоставлено Dürr крупномасштабные традиционные отрасли обрабатывающей промышленности, включая автомобилестроение или электронику. Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряющую роботов на малых и средних предприятиях (МСП) и в вспомогательных службах, как правило, в здравоохранении (SPARC, 2015).
Для крупномасштабных, высокоавтоматизированных промышленных сред преимущество роботизированных решений по сравнению с операторами-людьми в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные нагрузки с исключительной точностью позиционирования и на высокой скорости. . Эти аспекты имеют ключевое значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применение в производстве малого и среднего бизнеса и персональный помощник бросают вызов этой традиционной парадигме робототехники. Ключ к успеху этих новых приложений заключается в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей. Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на работу роботов. Опыт, накопленный за последние десятилетия, в основном в медицинской робототехнике, свидетельствует о том, что для безопасного и эффективного взаимодействия с человеком роботы должны в основном двигаться как люди, тем самым жертвуя некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости. Эта ситуация привела к обильным исследованиям в последние годы, посвященным оптимальному выбору первичных двигателей и трансмиссий для приведения в действие HRI (Zinn et al., 2004; Ham et al., 2009).; Икбал и др., 2011; Вейл и Се, 2016 г.; Верстратен и др., 2016; Groothuis и др., 2018; Саеренс и др., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию сцепления между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных достижений в этой области дает полезную информацию для понимания влияния редуктора на общую производительность системы. Паш и Сиринг (1983) определили важность инерции при срабатывании и предложили использовать передаточное отношение, соответствующее инерции двигателя и отраженной нагрузки, как средство минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применил эту идею к области робототехники и определил результирующую способность ускорения рабочего органа в качестве определяющего параметра. Ван де Стрэте и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предложили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов. Роос и др. (2006) изучали оптимальный выбор привода для силовых агрегатов электромобилей с учетом эффективности коробки передач. Гиберти и др. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность редуктора и инерцию редуктора как наиболее важные параметры для выбора срабатывания и предлагают графический метод для оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009 г.)) снова сосредоточился на промышленных роботах и представил метод, который моделирует коробку передач с сильным акцентом на массу, инерцию и трение. Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют вклад трения в планетарную коробку передач, в которой кулоновское трение является доминирующим механизмом трения, и демонстрируют, как эффективность коробки передач обычно становится доминирующей над эффективностью двигателя при высоких передаточных числах трансмиссии.
Начиная с первоначальных моделей редукторов, использованных в этих работах, где редукторы моделируются как идеальные передаточные числа, сложность моделей постепенно возрастала. Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, важные эффекты, такие как жесткость при кручении и потери движения, не учитываются, а модели инерции и эффективности редуктора сильно упрощены. Это оправданный подход для многих приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Поэтому требуется другой подход, чтобы предоставить полезные рекомендации по выбору редуктора в HRI, избегая чрезмерной сложности задач оптимизации в этой области. Предоставление подробной информации об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора является еще одним вариантом, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др. (2016), а также Фам и Ан (2018) представляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не проанализированы достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора состоит в том, чтобы последовательно дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо возможности прогнозировать будущее технологий редукторов в робототехнике, этот подход может помочь неспециалистам по редукторам определить подходящие технологии компактных редукторов для многофакторных требований новых роботизированных приложений (López-García et al., 2018). Специалистам по коробкам передач из других областей этот анализ может помочь получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить структуру оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробки передач для этой области. Эта структура включает в себя сильную перспективу pHRI и включает новый параметр — коэффициент скрытой мощности — для оценки внутренней эффективности определенной топологии редуктора. Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий трансмиссии, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, полученных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Система оценки роботизированных трансмиссий, дополненная HRI
Управление
Управление роботизированными устройствами — очень широкая и сложная тема, предмет обширной исследовательской литературы. В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния редуктора на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные роботизированные устройства превосходно достигают высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 19). 91). Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: введение дополнительных нелинейностей и сильное влияние на отраженные инерции.
Нелинейности, возникающие при включении трансмиссии, принимают в основном форму люфта и/или трения и уменьшают полосу пропускания системы, создавая серьезные проблемы управления (Schempf, 1990). Заявление о шестернях приводит к люфту, трению и (нежелательному) податливости, что затрудняет точное управление (Hunter et al., 1991) сегодня так же актуален, как и почти 30 лет назад. Для некоторых технологий большие погрешности кинематической передачи и особенно нелинейные характеристики трения также могут вызывать значительную нелинейность.
Передачи также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, видимой первичным двигателем и отражаемой им, на коэффициент, равный квадрату коэффициента уменьшения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции с обеих сторон трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 19).83).
Отраженная инерция особенно важна, когда рабочие органы подвергаются быстрым и частым изменениям скорости и/или крутящего момента, что является очень распространенной ситуацией в задачах автоматизации и робототехники. В этих случаях вводится перспектива пропускной способности, чтобы подтвердить способность системы следовать этим изменениям (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа обратной управляемости, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие от ее естественного выхода (обратная управляемость). Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, характерном для реабилитационных устройств или экзоскелетов. Как показывают Ван и Ким (2015), способность редуктора к обратному ходу включает комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и поэтому она тесно связана с эффективностью редуктора.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как ее передаточных чисел, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за ограждениями в высоко структурированных средах, где они могут воспользоваться преимуществами своих быстрых и точных роботизированных движений, не ставя под угрозу целостность людей-операторов.
Безопасный pHRI, включающий возможность безопасного перемещения в неструктурированной/неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из , формируя механический импеданс (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением/скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора/пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться податливым, человекоподобным образом (Караяннидис и др., 2015). Это подчеркивает важность импеданса и внутренней податливости (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009).), где желательно высокое соблюдение требований (Хаддадин и Крофт, 2016).
С точки зрения управления инерция полезной нагрузки, отражаемая на первичный двигатель, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно малая инерция ротора первичного двигателя усиливается этим же коэффициентом при отражении со стороны полезной нагрузки, которая должна быть добавлена к инерции, возникающей в результате движения роботизированного устройства и нагрузки, по соображениям безопасности, далее ограничение рабочих скоростей.
Хотя сегодня в большинстве приводов pHRI используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Sensinger et al. (2011) видят большой потенциал для робототехники в использовании двигателей с высоким крутящим моментом (out-runner), требующих очень малых передаточных чисел. Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их словам, увеличение инерции двигателя и уменьшение передаточного числа должно привести к снижению инерции двигателя, отражаемой на рабочий орган, что позволит увеличить рабочие скорости и/или полезную нагрузку без ущерба для целостности оператора. Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют более низкое трение и люфт, уменьшая вклад коробки передач в нелинейность. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый крутящий момент (Siciliano et al., 2010).
При более внимательном рассмотрении спецификаций этих новых двигателей возникают некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате крайней жажды высоких электрических токов (HALODI Robotics, 2018; GENESIS Robotics, 2020) .
Подводя итог, можно сказать, что нет единого мнения о том, как лучше всего подойти к безопасному запуску робототехники. Тем не менее, прочная естественная связь между безопасностью и управляемостью столь же очевидна, как и ключевое значение передаточного числа трансмиссии и ее нелинейности.
Вес и компактность
Легкая конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хороших характеристик в приложениях новой робототехники (Albu-Schäffer et al. , 2008). Новейшие коллаборативные роботы (коботы), такие как легкий робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), основаны на этом принципе и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов. Благодаря более низкой инерции легкие коботы обеспечивают более высокую производительность и более высокие скорости без ущерба для безопасности пользователя.
Этот выгодный аспект легкой конструкции имеет дополнительные преимущества. Для мобильных роботизированных систем меньший вес означает большую автономию. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкая конструкция также является ключевым аспектом повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характерная черта, присущая этим новым робототехническим устройствам: от коботов до вспомогательных устройств. Компактность дает преимущества в маневренности и комфорте взаимодействия.
В роботизированных приложениях, связанных с тесным взаимодействием с людьми или предоставлением мобильных услуг, позиции по своей природе крайне неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих приложений с двумя последствиями: первичные двигатели и трансмиссии — как правило, самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции, как правило, требуют более низких крутящих моментов.
В отличие от веса редуктора определение подходящего критерия для оценки вклада редуктора в компактность системы является более сложной задачей. Физический объем определенно играет роль, но наш опыт показывает, что фактическая форма коробки передач имеет большее значение. Еще один аспект, о котором стоит упомянуть, это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, которые также могут представлять особый интерес. Поэтому мы решили включить в нашу систему оценки приблизительную форму (диаметр × длина) выбранного редуктора, в то время как наличие дополнительного пространства можно непосредственно оценить с помощью предоставленных цифр каждой из конфигураций.
Эффективность и виртуальная мощность
Эффективность
В таких областях, как автомобилестроение или ветряные турбины, эффективность редукторов уже давно находится в центре внимания. С другой стороны, в робототехнике эффективность до недавнего времени не становилась ключевым параметром при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокая эффективность — более низкие потери — позволяют снизить потребление энергии и вносят непосредственный положительный вклад как в эксплуатационные расходы, так и в воздействие машины или устройства на окружающую среду. Для мобильных и носимых роботизированных устройств более высокая эффективность помогает также снизить вес системы — требуются батареи меньшего размера — и в конечном итоге приводит к большей автономности и удобству использования (Kashiri et al. , 2018).
В редукторах есть еще одно преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, являются замкнутыми и используют контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростью ω Out фиксируется числом зубьев и определяет его передаточное число i K . В редукторе без потерь отношение крутящего момента i τ между выходным и входным крутящими моментами τ точно соответствует обратному кинематическому передаточному отношению с обратным знаком. Но в реальной коробке передач наличие потерь изменяет это равенство, а так как кинематическое передаточное число запирается числом зубьев, то абсолютная величина передаточного отношения должна уменьшаться пропорционально потерям:
ωInωOut= iK=- η iτ=-ητOutτIn;где η представляет эффективность системы.
Следовательно, высокие потери в редукторе означают, что меньший крутящий момент доступен для рабочего органа, и для достижения того же усиления крутящего момента требуются более высокие передаточные отношения.
Коробки передач подвержены нескольким типам потерь. Для их классификации мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависящие от нагрузки (механические) потери мощности, возникающие в результате скольжения и качения контактных поверхностей как в контактах шестерен, так и в подшипниках, и — независимые (спиновые) потери мощности — возникающие при взаимодействии вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная мощность
Термин «Виртуальная мощность» был, насколько известно авторам, первоначально придуман Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетарных топологиях, было известно в течение длительного времени при разные имена в том числе Blindleistung (Wolf, 1958; Mueller, 1998) и латентная или бесполезная сила (Macmillan and Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
Коробка передач по своему принципу действия всегда включает в себя высокоскоростную сторону с низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Таким образом, его внутренние зубчатые зацепления обычно работают в условиях высокого крутящего момента и низкой скорости или в условиях высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их специфической топологии некоторые зубчатые зацепления могут одновременно сталкиваться с высокой скоростью и высоким крутящим моментом. Зубчатые зацепления могут легко достигать эффективности выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), в этих высоконагруженных зацеплениях возникают неожиданно большие потери. . Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое мы далее будем называть топологической эффективностью редуктора.
Некоторые из вышеупомянутых авторов предлагают методы оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Чена и Анхелеса (2006), виртуальная мощность определяется как мощность, измеренная в движущейся — неинерциальной — системе отсчета. Скрытая мощность , введенная Ю и Бичли (1985), соответствует виртуальной мощности, когда система отсчета является несущим элементом коробки передач, а коэффициент виртуальной мощности представляет собой отношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем коэффициент скрытой мощности топологии редуктора как отношение суммы скрытых мощностей во всех зацеплениях к мощности, подводимой к редуктору. Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию генерировать большие потери при зацеплении.
Чтобы облегчить понимание практического влияния топологического КПД, характеризуемого коэффициентом скрытой мощности, на общую эффективность данной конфигурации редуктора, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полный редуктор робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к различной эффективности зацепления. Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99% — и позволяет нам упростить наши расчеты, учитывая общую уникальную эффективность зацепления η 90 260 90 212 м 90 213 90 261 = 99 % во всех контактах зацепления в нашей коробке передач.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, будет иметь только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности в этом эталонном редукторе можно легко рассчитать как функцию входного мощность как:
Ploss= PIN * (1-ηm)
Таким образом, общая эффективность зацепления всего редуктора соответствует эффективности одиночного зацепления:
ηsys,ideal= PIN-PLossPIN=ηm=99%;
Неидеальный редуктор с одним и тем же общим η m во всех его зацеплениях и с коэффициентом скрытой мощности L, характеризующим его топологический КПД, показывает, что общие потери в редукторе могут быть аппроксимированы в первую очередь как:
Ploss, L≈ PIN* L *(1-ηm)
И общая эффективность зацепления всего редуктора становится теперь:
ηsys,L= PIN-PLoss,LPIN≈L * ηm+(1-L)
Что для η m = 99% и для значения L = 50 дает:
3
3
3
L≈ 50%
Этот результат должен быть частично относительным, потому что накопленные потери в первых зацеплениях, задействованных в различных потоках внутренней мощности в редукторе, приводят к тому, что меньшая виртуальная мощность, как предсказывается этими уравнениями, будет проходить через последующие зацепления. Результатом этого является то, что эффективность обычно падает немного медленнее при использовании коэффициента скрытой мощности, и более реалистичное значение для предыдущего расчета обычно составляет от 55 до 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим коэффициентом скрытой мощности требуют чрезвычайно высокой эффективности сетки: для достижения эффективности системы >70% система с L = 100 нуждается в средней эффективности сетки КПД выше 99,5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность редуктора. Это позволяет нам использовать упрощенный метод для расчета коэффициента скрытой мощности, который в первую очередь не учитывает влияние потерь, вызванных снижением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций коробки передач, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важное влияние КПД редуктора, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности. Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наш обмен мнениями с производителями редукторов показывает, что это обычная практика, она не зависит от входной мощности и легко доступна в паспорте производителя.
Производительность
По сравнению со специальными и автоматическими сборочными машинами промышленные роботы не могут достичь таких же стандартов точности и скорости. Оба аспекта должны были быть скомпрометированы, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения, HRI — это еще один шаг в том же направлении: чтобы соответствовать дальнейшим требованиям гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен на рис. 1.9.0003
Рисунок 1 . Графическое описание перехода основных целей задачи от машин через промышленных роботов и коботов к людям-операторам.
Точность и воспроизводимость
Несколько аспектов редуктора влияют на итоговую общую точность всего роботизированного устройства. Эти аспекты долгое время находились в центре внимания традиционной робототехники и сегодня хорошо изучены благодаря работам Майра (1989), Шемпфа и Йоргера (1993) или Розенбауэра (19).95), предоставляя очень хорошие ссылки для понимания этих сложных влияний. Эти исследования определяют особенно важную роль потери движения и жесткости при кручении.
Lost Motion — это дальнейшее развитие принципа люфта, который описывает полное вращательное смещение, создаваемое приложением ±3% от номинального входного крутящего момента.
Жесткость при кручении характеризует податливость к кручению всех элементов коробки передач, участвующих в полном потоке сил, под действием внешнего крутящего момента. Он устанавливается путем блокировки входа редуктора и постепенного увеличения крутящего момента на выходе, при этом регистрируются изменения жесткости на кручение, приводящие к отклонениям от идеально линейного поведения.
Точность по своей природе — малые потери движения и линейность, высокая жесткость на кручение — редукторы упрощают задачу управления и обеспечивают высокую точность, идеально подходящие для управления положением, в то время как менее точные редукторы усложняют управление положением и могут использоваться для более податливых срабатывание. В технологиях редукторов, где скорость оказывает сильное влияние на потери или особенно нелинейные характеристики трения, необходимо также учитывать вклад этих элементов в точность.
Чтобы охарактеризовать возможности точности, наша структура включает потери движения и жесткость на кручение вместе с субъективной оценкой изменения эффективности, вызванного изменениями скорости/крутящего момента.
Скорость и полезная нагрузка
Промышленные роботы могут обрабатывать большие полезные нагрузки за счет большой инерции. С другой стороны, для коботов соображения безопасности подразумевают, что они не должны справляться с такой большой полезной нагрузкой, но благодаря более легкой конструкции они могут фактически достичь большего соотношения полезной нагрузки к весу.
Соображения безопасности также ограничивают возможности использования этого снижения массы для увеличения рабочих скоростей (Haddadin et al., 2009). Тем не менее, более низкие крутящие моменты способствуют использованию более легких и быстрых электродвигателей, что в принципе требует более высоких передаточных чисел для этих применений.
Критерий для характеристики вклада редуктора в характеристики скорости и полезной нагрузки должен отражать эти аспекты и побуждать нас использовать в нашей структуре (i) максимальную входную скорость, (ii) максимальный повторяемый выходной крутящий момент — называемый ускоряющим крутящим моментом — и номинальный крутящий момент, ( iii) передаточное отношение и (iv) отношение крутящего момента к весу как для номинального, так и для ускоряющего крутящего момента.
Резюме
Характеристика роботизированных коробок передач является сложной задачей: высокая универсальность этих устройств и их сложное взаимодействие с первичными двигателями и системами управления делают прямое сравнение их характеристик особенно сложным.
Передаточное отношение оказывает сильное влияние на производительность роботизированной системы. Это объясняет его предпочтительную роль в литературе, посвященной оптимизации срабатывания роботов, и растущий интерес робототехников к возможностям использования регулируемых трансмиссий (Kim et al., 2002; Carbone et al., 2004; Stramigioli et al., 2008; Girard). и Асада, 2017). Хотя мы убеждены, что переменные трансмиссии очень перспективны и, безусловно, будут способствовать формированию будущего ландшафта робототехники, мы ограничили наш анализ здесь компактными коробками передач с постоянным передаточным числом. На данный момент мы считаем, что нам лучше всего подходит этот ограниченный объем, который на самом деле может также способствовать выявлению потенциальных областей применения и подходящих технологий для трансмиссий с переменным передаточным числом.
На основе этого анализа мы предлагаем систему оценки будущих роботизированных коробок передач на основе следующих параметров:
• Передаточное отношение
• Ускорение и номинальный выходной крутящий момент
• Вес
• Форма: Диаметр × длина
• Отношение ускорения и номинального крутящего момента к весу
• Эффективность: пиковое значение и субъективная зависимость от условий скорости и крутящего момента
• Топологическая эффективность: отношение скрытой мощности
• Начальный крутящий момент без нагрузки в прямом и обратном направлении в % от номинального входного крутящего момента
• Независимые от нагрузки потери
• Потеря движения
• Максимальная входная скорость
• Жесткость при кручении
Наша структура также включает эталонный вариант использования , репрезентативный для нескольких задач pHRI согласно нашему собственному опыту: крутящий момент ускорения более 100 Нм и передаточное число более 1:100, для которых должны быть оптимизированы вес, компактность и эффективность.
Обзор технологий передачи, используемых в настоящее время в промышленных роботах
Электрические двигатели, оснащенные механическими трансмиссиями, обычно выбираются в качестве приводов в робототехнике (Rosenbauer, 1995; Scheinman et al., 2016), а также в промышленных роботах. Эти механические трансмиссии почти неизбежно основаны на какой-либо зубчатой технологии (Sensinger, 2013).
Благодаря их большей способности снижать общий вес, а также тому, что электродвигатели, как правило, имеют более высокий КПД при высоких рабочих скоростях, еще одной характеристикой промышленных роботизированных трансмиссий является использование относительно больших коэффициентов передачи (передаточных чисел), обычно превышающих 1: 40 (Розенбауэр, 1995).
Планетарные редукторы: чрезвычайно универсальная платформа
Планетарные зубчатые передачи (PGT) — это компактные, очень универсальные устройства, широко используемые в силовых передачах. Благодаря своей характерной коаксиальной конфигурации и хорошей удельной мощности они особенно подходят для вращательных первичных двигателей, таких как электрические двигатели.
PGT могут использовать две дифференцированные стратегии для достижения высокого коэффициента усиления: (i) добавление нескольких ступеней обычных, высокоэффективных PGT (здесь они называются редукторами и представлены на рис. 2) или (ii) использование особенно компактных конфигураций PGT с возможностью производить высокие передаточные числа.
Рисунок 2 . Внутреннее устройство редуктора Neugart с указанием его основных элементов, адаптировано из Neugart (2020) с разрешения © Neugart GmbH. Он включает также схему лежащей в его основе топологии.
Несмотря на то, что использование нескольких ступеней редуктора обеспечивает наилучшее использование высокой эффективности зацепления шестерен и приводит к созданию высокоэффективных редукторов, это обычно приводит к тяжелым и громоздким решениям. С другой стороны, компактные конфигурации PGT могут достигать высоких передаточных чисел в очень компактных формах, но они страдают от неожиданно высоких потерь, связанных с высокой виртуальной мощностью (Crispel et al. , 2018).
Особо компактная конфигурация PGT для высоких передаточных чисел была впервые изобретена Вольфромом (1912 г.) и использовалась в редукторах серии RE компании ZF Friedrichshafen AG (ZF), предназначенных для применения в промышленных роботах (Looman, 1996 г.). На эту конфигурацию, показанную на рис. 3, сильно влияет Virtual Power, и ZF представляет собой единственное известное коммерческое применение конфигураций PGT, отличных от обычных редукторов. Хотя производство серии RE было прекращено в 90, Wolfrom PGT в последнее время вызывают растущий интерес сообщества исследователей робототехники, как мы резюмировали в предыдущей статье авторов (López-García et al., 2019a).
Рисунок 3 . Внутреннее устройство ZF серии RG Wolfrom PGT для применения в робототехнике адаптировано из Looman (1996) с разрешения © 1998 Springer-Verlag Berlin Heidelberg. Он включает также схему лежащей в его основе топологии.
В таблице 1 представлена оценка PGT. Несмотря на то, что размеры PGT RG350 Wolfrom компании ZF завышены для нашего эталона, мы использовали PGT ZF, чтобы попытаться оценить потенциал конфигураций PGT с высоким передаточным отношением, основываясь на существующих доказательствах его пригодности для достижения высоких передаточных чисел (Арнаудов и Караиванов, 2005; Мульцер, 2010). ; Капелевич и AKGears LLC, 2013). Для редукторов мы выбрали — при поддержке производителей — подходящие решения из портфолио Wittenstein и Neugart. Стоит отметить важную роль, которую играет максимальное передаточное отношение на ступень в редукторе: в то время как Wittenstein ближе к максимально возможному, учитывая предотвращение контакта между соседними планетами, Neugart выбирает в своей серии PLE (серия PLFE может достигать 1:100). соотношения только в двух каскадах) более строгий подход и, следовательно, требует трех каскадов вместо двух для Виттенштейна, чтобы достичь общего усиления 1:100. Это приводит к менее компактным решениям и более низкой эффективности для приложения 1:100, но позволяет компании Neugart достигать более высоких коэффициентов усиления — до 1:512 — без фундаментальных изменений в весе, размере или эффективности.
Таблица 1 . Система оценки решений для планетарных зубчатых передач.
Редукторы весят около 4 кг, что нельзя напрямую сравнивать с увеличенным RG350. RG350 имеет форму большего диаметра и меньшей длины, чем редукторы. С точки зрения отношения крутящего момента к весу значения обоих решений кажутся относительно близкими.
Редукторы имеют большое преимущество в их хорошем КПД (более 90%), которые также менее чувствительны к изменениям условий эксплуатации, а пусковые моменты на холостом ходу очень низкие. Конфигурации с высоким коэффициентом показывают, как сильное ограничение топологической эффективности приводит к снижению эффективности. Это, вероятно, объясняет, почему зубчатые передачи сегодня являются доминирующей технологией PGT в робототехнике.
PGT показывают самые высокие входные скорости (до 8500 об/мин), но их потери движения также самые большие (4–6 угловых минут) в обычных коробках передач. В робототехнике PGT широко использовались в первых промышленных роботах, в то время как в последние десятилетия их использование сильно сократилось, в основном из-за их ограничений по уменьшению люфта. Хотя существуют механизмы, ограничивающие изначально больший люфт PGT, они практически основаны на введении определенной предварительной нагрузки, что отрицательно сказывается на их эффективности (Schempf, 19). 90).
Harmonic Drives: легкий волновой редуктор с нулевым люфтом
Волновой редуктор был изобретен Musser (1955) и нашел широкое применение в 70-х годах, первоначально в аэрокосмической отрасли. Его основное космическое применение было в качестве механического элемента трансмиссии в луноходе Аполлона-15 в 1971 году (Schafer et al., 2005).
Его название связано с характерной деформацией его Flexspline , нежесткой тонкой цилиндрической чашки с зубьями, которая служит выходом. Flexspline входит в зацепление с фиксированным сплошным круглым кольцом с внутренними зубьями шестерни, Круговой шлиец , в то время как он деформируется вращающейся эллиптической пробкой — Генератор волн , как видно на рисунке 4. Этот тип редуктора чаще всего называют Harmonic Drive© (HD) из-за очень эффективная стратегия защиты интеллектуальной собственности.
Рисунок 4 . Внутренняя конфигурация коробки передач Harmonic Drive CSG (слева), адаптированная из Harmonic Drive (2014) с разрешения © Harmonic Drive SE, 2019, и коробка передач E-Cyclo (справа), адаптированная из SUMITOMO (2020) с разрешения © 2020 Sumitomo Drive Германия ГмбХ. Также включена схема лежащей в их основе топологии KHV, которая использовалась для расчета коэффициента скрытой мощности в Приложении I.
Для сравнительного анализа мы выбрали два подходящих редуктора Harmonic Drive: CSD-25-2A, предназначенный для интеграции в роботизированный шарнир для обеспечения адекватных конструктивных граничных условий, и сверхлегкий редуктор CSG-25-LW, представляющий собой конструктивно достаточное решение. , что можно более непосредственно сравнить с другими технологиями. Совсем недавно SUMITOMO представила новый редуктор E-CYCLO, также основанный на волновом принципе действия. SUMITOMO предоставила нам доступ к своему последнему каталогу (SUMITOMO, 2020), что позволило нам включить его в наш тест (таблица 2). Еще одна интересная волна деформации, очень похожая на Harmonic Drive, недавно была представлена GAM в своей серии коробок передач для роботов, которая также включает в себя планетарные зубчатые передачи и циклоидные приводы (GAM, 2020).
Таблица 2 . Структура оценки решений для волн деформации.
Выбранная модель CSG имеет значительно больший крутящий момент, чем указано в нашем эталонном тесте. Форма характеризуется большими диаметрами, чем длинами, а вес значительно ниже, чем у других технологий, что приводит к лучшим отношениям крутящего момента к весу среди анализируемых технологий. Действительно, характерное зацепление с несколькими зубьями обеспечивает большее сопротивление крутящему моменту, чем в PGT, что делает эту технологию очень подходящей для соединений ближе к рабочему столу, где они часто встречаются в современных промышленных роботах.
Пиковый КПД ниже, чем у редукторов, и ближе к RG350, а КПД особенно чувствителен к условиям эксплуатации. Поезда Strain Wave демонстрируют большие независимые от нагрузки потери и пусковые моменты без нагрузки, особенно в условиях обратного движения, которые становятся особенно важными для высоких скоростей и/или низких крутящих моментов (Harmonic Drive, 2014). Для роботизированных устройств HRI, подверженных частым изменениям скорости и полезной нагрузки в сочетании с обменом энергией между роботизированным устройством и пользователем, это означает, что средняя эффективность быстро падает ниже 40–50% (López-García et al. , 2019).б). Заслуживает внимания также их большой коэффициент скрытой мощности, указывающий на одновременное наличие высоких крутящих моментов и скоростей в зацеплениях зубьев, что также помогает объяснить относительно низкий КПД.
Еще раз благодаря зацеплению с несколькими зубьями можно достичь потерь движения менее 1 угловой минуты, что дает этому редуктору сильное преимущество, помогающее Harmonic Drives найти широкое применение в промышленных роботах. Они смогли вытеснить PGT из многих приложений, особенно после значительного улучшения производительности в результате новой геометрии зубьев, представленной этой компанией в 90, что также улучшило линейность жесткости (Slatter, 2000).
В прошлом максимальная входная скорость была серьезным ограничением для использования редукторов HD (Schempf, 1990), но новые усовершенствования и усовершенствования конструкции теперь позволяют им достигать скорости до 7500 об/мин.
Циклоидные приводы: для обеспечения высокой прочности и жесткости при кручении
С момента изобретения Лоренцем Брареном в 1927 г. (Li, 2014) циклоидные приводы нашли применение в основном на лодках, кранах и некотором крупном оборудовании, таком как поезда для прокатки стальных полос или станки с ЧПУ. . В циклоидных приводах эксцентричное входное движение создает колебательное циклоидальное движение одного большого планетарного колеса, которое затем преобразуется обратно во вращение выходного вала и приводит к высокой редукционной способности (Gorla et al., 2008), см. Рисунок 5.
Рисунок 5 . Внутренняя конфигурация циклоидных приводов SUMITOMO Fine Cyclo F2C-A15 и Fine Cyclo F2C-T155 с указанием основных элементов адаптирована из SUMITOMO (2017) с разрешения © 2017 Sumitomo Cyclo Drive Germany GmbH. Он включает также схему лежащих в его основе топологий.
Таблица 3 включает лидера рынка (NABTESCO RV) в этом сегменте и основных претендентов (SPINEA и SUMITOMO). RV от NABTESCO и серия Fine-Cyclo T от SUMITOMO включают обычную ступень PGT с предварительной передачей. Полезная нагрузка этих устройств больше, чем требуется для нашего теста, и приводит к большому весу. Это уже дает ценную информацию: более компактные решения недоступны на рынке и, согласно информации, предоставленной некоторыми производителями, менее интересны, поскольку требуют предельной точности изготовления и в конечном итоге приводят к высоким затратам.
Таблица 3 . Структура оценки решений циклоидного привода.
Формы аналогичны формам волновых редукторов, а вес больше и ближе к весу PGT по вышеупомянутым причинам. Отношение крутящего момента к весу больше, чем у PGT, но немного ниже, чем у волновых редукторов. Основное преимущество циклоидных приводов заключается именно в их способности выдерживать большие нагрузки и особенно ударные нагрузки, а также в малом объеме технического обслуживания.
Пиковый КПД выше, чем у волновых редукторов, и ближе к КПД PGT, но КПД сильно зависит от условий эксплуатации (Mihailidis et al., 2014), а пусковой момент без нагрузки и коэффициент скрытой мощности высоки, оба похожи на редукторы деформации.
Хотя они, как правило, вызывают некоторый люфт, такой, если его часто компенсируют в их конструкции, чтобы достичь уровней, сравнимых с редукторами с волновой деформацией, вероятно, за счет немного более высокого трения. Их жесткость на кручение является самой большой из проанализированных технологий коробок передач.
Циклоидные приводы имеют врожденное ограничение, связанное с высокими входными скоростями, вызванное наличием большого и относительно тяжелого планетарного (кулачкового) колеса, что приводит к большой инерции и дисбалансу. Это мотивирует использование обычно двух планетарных колес, расположенных последовательно и смещенных на 180 градусов друг к другу, чтобы устранить дисбаланс, уменьшить вибрации и обеспечить более высокие входные скорости. Это объясняет, как благодаря комбинированию циклоидных приводов со ступенями предварительной передачи, состоящими из обычных ступеней PGT, циклоидные приводы получили широкое распространение в робототехнике. Такое расположение повышает эффективность, снижает чувствительность к высоким входным скоростям и обеспечивает легкую адаптацию их передаточных чисел. В 90’s Harmonic Drives доминировали на рынке роботизированных коробок передач, но усовершенствования в циклоидной технологии позволили циклоидным приводам начать завоевывать территорию сначала в Японии, а затем и в других странах (Rosenbauer, 1995). В настоящее время такие производители, как NABTESCO, SUMITOMO или NIDEC, предлагают циклоидные гибриды с предварительной передачей PGT, охватывающие более 60% рынка роботизированных коробок передач, и поэтому они стали новой доминирующей технологией, особенно для проксимальных суставов, подверженных более высоким нагрузкам и меньшим ограничениям по весу (WinterGreen). исследования, 2018).
Наконец, стоит упомянуть наличие относительно большой пульсации крутящего момента, которая вносит нелинейности и усложняет их контроль. Эта пульсация крутящего момента связана с необходимостью использования циклоидных профилей зубьев, чтобы избежать взаимодействия зубьев между большими планетарными колесами и зубчатым венцом, что делает эти устройства чрезвычайно чувствительными к изменениям межцентрового расстояния, вызванным даже небольшими производственными ошибками. Существует несколько попыток улучшить эту ситуацию с использованием эвольвентных зубьев, менее чувствительных к изменениям межцентрового расстояния, с уменьшенными углами давления и/или коэффициентами контакта для минимизации радиальных сил и повышения эффективности (Морозуми, 19). 70), а также с использованием других форм неэвольвентных зубов (Коряков-Савойский и др., 1996; Хлебаня, Куловец, 2015).
Обзор новых технологий трансмиссии для робототехники
Усилитель крутящего момента REFLEX
Компания Genesis Robotics привлекла большое внимание в сообществе робототехники появлением двигателя с прямым приводом LiveDrive © . Согласно Genesis, LiveDrive в двух доступных топологиях — с радиальным и осевым потоками — обеспечивает эталонную производительность по соотношению крутящего момента к весу. Двигатель с осевым потоком может достигать 15 Нм/кг, в то время как радиальный поток ограничен максимум 10 Нм/кг.
Чтобы расширить спектр своего применения, Genesis Robotics представила совместимый редуктор под названием Reflex , показанный на рис. 6. Этот литой сверхлегкий пластиковый редуктор предназначен для легких роботов, и хотя изначально он был разработан LiveDrive и, следовательно, ориентирован на передаточные числа ниже 1:30, он также способен обеспечивать более высокие передаточные числа до 1:400 (GENESIS, 2018).
Рисунок 6 . Внутренняя конфигурация и основные элементы редуктора Reflex адаптированы из GENESIS Robotics (2020) с разрешения © 2019Генезис Роботикс. Он включает также схему лежащей в его основе топологии.
В основе лежит топология Wolfrom PGT с несколькими меньшими планетами (Klassen, 2019), в которой реакционное (неподвижное) кольцевое зубчатое колесо разделено на две части для целей балансировки в соответствии с конструкцией, первоначально предложенной Россманом (1934) и использованной а также в Hi-Red Gear Tomcyk (2000).
В редукторе Reflex выходное кольцо также разъемное для облегчения сборки со спиральными зубьями. Еще одним интересным аспектом этой конструкции является лентовидная форма сателлитов, которая, по мнению авторов, связана с возможностью предварительной загрузки системы для достижения нулевого люфта, который, по утверждению Genesis, возможен с этой коробкой передач. По словам компании, гибкость пластиковых планетарных колес также способствует уменьшению люфта.
К сожалению, пока недоступны независимые тесты, подтверждающие указанные характеристики, и на данный момент нет официальных данных, в частности, об эффективности от Genesis, поэтому в Таблице 4 приведено только значение коэффициента скрытой мощности, полученное из его топологии.
Таблица 4 . Структура оценки новых технологий коробок передач.
Таким образом, несмотря на то, что лежащая в основе топология Wolfrom указывает на то, что эффективность, безусловно, будет сложной задачей, эта инновационная коробка передач иллюстрирует большой потенциал, доступный для переосмысления существующих технологий и их адаптации к будущим потребностям робототехники. Genesis Robotics недавно вступила в интересное партнерство с известными промышленными компаниями, такими как Koch Industries Inc. и Demaurex AG.
Привод Archimedes
Компания IMSystems из Нидерландов является дочерней компанией Делфтского технологического университета, созданной в 2016 году для использования изобретения Привода Archimedes (Schorsch, 2014).
Привод Archimedes снова повторяет топологию редуктора Wolfrom (также с разрезным зубчатым венцом в некоторых конструкциях), но включает революционную инновацию в использовании роликов вместо зубчатых колес, чтобы заменить контакты зубьев контактами качения, см. Рис. 7. Контролируемая деформация сателлитов-катков позволяет передавать крутящий момент между сателлитами аналогично колесам автомобиля.
Рисунок 7 . Внутренняя конфигурация Archimedes Drive с подробным изображением его планет Flexroller, адаптированным из IMSystems (2019) с разрешения © 2019 Innovative Mechatronic Systems B.V., со схемой его базовой топологии.
Производительность, показанная в таблице 4, взятой из брошюры компании (IMSystems, 2019) и доступной по запросу, показывает, что использование топологии Wolfrom дает этому устройству возможность достигать очень высоких передаточных чисел в компактной форме, но это также приводит к низкой топологической эффективности. По данным IMSystems, замена контакта зубьев шестерни на контакт качения способствует минимизации контактных потерь, что, в частности, при передаче крутящего момента между планетарным валом и кольцевыми роликами должно компенсировать высокий коэффициент скрытой мощности и привести к максимальной эффективности. около 80% (IMSystems, 2019 г.)). Данные по пусковым моментам или независимым от нагрузки потерям не предоставляются.
Для обеспечения передачи высокого крутящего момента без проскальзывания необходимо строго контролировать деформацию планетарных роликов, а также производственные допуски редуктора. Это представляет собой одну из основных технологических проблем и является основой инноваций, представленных этой технологией (Schorsch, 2014).
NuGear
STAM s.r.l. — частная инжиниринговая компания из Генуи, которая помогла разработать роботизированное соединение для робота-гуманоида I-Cub. Их NuGear представляет собой нутирующий редуктор, который изначально был задуман (Barbagelata and Corsini, 2000) для космических приложений, но может развить свой потенциал и для робототехники за счет исследования альтернативных производственных средств.
В открытом доступе нет информации о рабочих характеристиках этого редуктора, что означает, что мы можем предоставить здесь только предварительный анализ его топологии и результирующих характеристик, которые можно ожидать на основе ограниченной информации, доступной в основном из проекта Caxman EU. (CAxMan, 2020), для которых NuGear был вариантом использования, и из доступных патентов (Barbagelata et al., 2016).
На Рисунке 8 внутренняя структура NuGear представлена с использованием эквивалентной конфигурации PGT — без аспекта нутации для облегчения понимания. При этом становится ясно, что NuGear напоминает два PGT Wolfrom, для которых несущая используется в качестве входа, соединенных последовательно, и где каждый из них соответствует одному из двух этапов, определенных в Barbagelata et al. (2016). Это еще раз указывает на то, что в этой коробке передач будут присутствовать относительно высокие коэффициенты скрытой мощности. Для передаточного числа 1:100 и при условии сбалансированного усиления 1:10 на каждой из двух ступеней, как это предложено в Barbagelata et al. (2016), с помощью уравнений, полученных в Приложении I, мы получаем коэффициент скрытой мощности, равный 32, что указывает на аналогичную топологическую эффективность эффективности Wolfrom PGT.
Рисунок 8 . Внутренняя конфигурация двухступенчатого редуктора NuGear для версии с оппозитными планетарными контактами адаптирована из CAxMan (2020) с разрешения © Stam S.r.l. Он включает также схему лежащей в его основе топологии.
Остается подтвердить, в какой степени использование методов аддитивного производства может помочь STAM s.r.l. уменьшить большие производственные затраты на конические зубчатые колеса, а также может ли операция нутации обеспечить достаточную надежность и более компактную форму, что может открыть дверь для ее использования в области робототехники (CAxMan, 2020).
Двусторонний привод
Компания FUJILAB в Йокогаме предложила в Fujimoto (2015) редуктор с высоким обратным ходом для робототехники, который особенно подходит для работы без датчика крутящего момента (Kanai and Fujimoto, 2018).
Как видно на рис. 9, конфигурация этого устройства опять же соответствует конфигурации Wolfrom PGT. Используя эту топологию, Fujimoto et al. смогли достичь при передаточном числе 1:102 КПД прямого хода 89,9% и КПД заднего хода 89. .2%. Пусковой крутящий момент без нагрузки в направлении обратного хода составил 0,016 Нм в редукторе с внешним диаметром ~ Φ50 мм (Kanai and Fujimoto, 2018). Стратегия, используемая для достижения такой высокой эффективности с топологией Wolfrom, заключается в оптимизации коэффициентов сдвига профиля (Fujimoto and Kobuse, 2017).
Рисунок 9 . Внутренняя конфигурация двустороннего привода, высокоэффективного редуктора, способного достигать передаточного числа 1:102 с использованием топологии Wolfrom, любезно предоставлена © Yasutaka Fujimoto.
Эти многообещающие результаты — см. Таблицу 4 — показывают, что выравнивание отношений подхода и углубления за счет оптимизации коэффициентов сдвига профиля может привести к чрезвычайно высокой эффективности создания сетки. Насколько известно авторам, эта стратегия была первоначально предложена Hori и Hayashi (1994) и особенно интересна для топологии Wolfrom, где она может в конечном итоге обеспечить эффективность выше 90% в сочетании с высокими передаточными числами и компактными топологиями.
Подшипник шестерни привода
После новаторской работы в этой области Джона М. Враниша из НАСА, которая привела к изобретению планетарной передачи без водила Вранишем (1995 г.) и подшипников с неполным зубчатым зацеплением (Враниш, 2006 г.), Центр космических полетов представил свою концепцию нового зубчато-подшипникового привода в Weinberg et al. (2008).
Северо-восточный университет в Бостоне продолжил разработку этого нового привода для применения в роботизированных соединениях. Как видно на рис. 10, он включает в себя редуктор Wolfrom, приспособленный для включения безводиловой конструкции Vranish и зубчатых подшипников. Зубчатые подшипники представляют собой контакты качения, которые предусмотрены для каждой пары зацеплений шестерен в соответствии с их делительным диаметром и снижают нагрузку на подшипники редуктора (Brassitos et al., 2013). Эта топология обеспечивает удобную интеграцию электродвигателя, который, таким образом, встроен в полую область внутри большого солнечного зубчатого колеса в конфигурации, специально предназначенной для космических приложений (Brassitos and Jalili, 2017).
Рисунок 10 . Внутренняя конфигурация зубчато-подшипникового привода, включая встроенный бесщеточный двигатель, адаптированная из Brassitos and Jalili (2017) с разрешения © 2017 Американского общества инженеров-механиков ASME. Справа также показана базовая топология Вольфрома с расщепленным реакционным кольцом.
В Brassitos and Jalili (2018) металлический прототип зубчато-подшипникового привода с передаточным числом 1:40 характеризуется жесткостью, трением и кинематической ошибкой. Измерения полностью соответствуют измерениям FUJILAB и подтверждают низкий пусковой крутящий момент без нагрузки в этой конфигурации (0,0165 Нм для внешнего диаметра редуктора ~Φ100 мм). После экспериментального измерения жесткости, трения и кинематической погрешности их привода (Brassitos and Jalili, 2018) они интегрировали эти значения в динамическую модель, которая затем была смоделирована и сравнена с реакцией скорости разомкнутого контура системы при свободном синусоидальном движении, показав хорошие результаты. корреляции и предполагает очень удобную высокую линейность передачи.
Предварительные измерения показали хороший комбинированный КПД двигателя и редуктора Wolfrom с передаточным числом 1:264 (Brassitos et al., 2013), что не очень хорошо коррелирует с расчетным коэффициентом скрытой мощности, равным 196. Эффективность не снова был в центре внимания недавних статей авторов, и мы, к сожалению, не смогли на данный момент подтвердить окончательные уровни эффективности, которых могут достичь более новые прототипы.
В любом случае привод Gear Bearing предлагает очень интересные возможности для использования потенциала топологии Wolfrom в робототехнике. Возможность отказаться от держателя и встроить электродвигатель внутрь редуктора в общем корпусе приводит к впечатляюще компактным конструкциям. Возможность использования роликов с зубчатыми подшипниками для снижения радиальной нагрузки на подшипники также является многообещающим вариантом для повышения компактности и повышения эффективности (Brassitos et al. , 2019).).
The Galaxie Drive
Schreiber and Schmidt (2015) защищает основные инновации, включенные в Galaxie Drive, редуктор, который WITTENSTEIN в настоящее время выводит на рынок прецизионных редукторов через свой стартап Wittenstein Galaxie GmbH, созданный в апреле 2020 года.
Хотя техническое описание и подробная информация еще не доступны, принцип работы и ожидаемые выгоды также были раскрыты. В Galaxie Drive используется новый кинематический подход, основанный на линейном ведении единственного зуба в Держатель зубьев , но, по мнению этих авторов, его топология напоминает топологию зубчатого колеса, см. рис. 11. Гибкий шлицевой элемент заменен держателем зубьев, включающим два ряда отдельных зубьев, расположенных радиально и зацепляющихся с круговым шлицем, как показано на рисунке 11. вращающийся вал Poligon Shaft выполняет роль генератора волн с многоугольным периметром (Schreiber and Röthlingshöfer, 2017). Таким образом, несколько отдельных зубьев входят в зацепление с круговым шлицем одновременно, как и в Harmonic Drive. Это, вместе с высокоустойчивым к крутящему моменту двухточечным контактом между каждым отдельным зубом и держателем зубов, обеспечивает этому устройству характерный нулевой люфт, высокую жесткость на кручение и эталонную способность отношения крутящего момента к весу, по словам производителя.
Рисунок 11 . Деталь зацепления зубьев коробки передач Galaxy (R) DF адаптирована из Schreiber (2015) с разрешения © 2020 Wittenstein Galaxie GmbH. Он включает схему базовой топологии KHV.
В прямом обмене представители Wittenstein подтвердили, что очевидная проблема трения между отдельными зубьями и их направляющим круглым кольцом решена, и Galaxie может достигать пиковой эффективности более 90%. Из-за лежащей в его основе конфигурации KHV ожидаются большие коэффициенты скрытой мощности, но пока невозможно получить более глубокое представление об эффективности зацепления, которое будет результатом радиального перемещения зубьев, которое включает в себя новую логарифмическую спиральную боковую поверхность зуба (Michel, 2015).
Первоначально Galaxie Drive предназначался для точного машиностроения, где высокая жесткость и сопротивление крутящему моменту могут помочь увеличить скорость и повысить производительность. В будущем мы, безусловно, сможем оценить потенциал этой инновационной технологии и для роботизированных приложений.
Обсуждение
Новое поколение робототехнических устройств меняет приоритеты в выборе адекватных коробок передач. Вместо предельной точности на высоких скоростях к этим устройствам предъявляются более строгие требования с точки зрения легкости и очень эффективного механического усиления.
Сверхлегкие тензоволновые приводы (HD, E-cyclo), безусловно, в очень хорошем состоянии для удовлетворения этих потребностей, что подтверждается их нынешним доминированием в области коботов. При рассмотрении волнового привода для роботизированной задачи pHRI работа при низких крутящих моментах и скоростях должна быть сведена к минимуму, если требуется максимизировать эффективность. Хотя их оптимизированная геометрия зубьев способствует более линейной жесткости на кручение, трение остается сильно нелинейным и зависит от направления, что также накладывает определенные ограничения на использование. Храповой механизм вследствие ударной нагрузки является еще одним ограничением, которое следует учитывать для этого типа коробки передач, чего не должно быть у E-Cyclo (SUMITOMO, 2020).
Циклоидные приводы прошли долгий путь, прежде чем в конечном итоге стали доминирующей технологией в промышленных роботах. Благодаря технологическим достижениям, направленным на улучшение ограничений по люфту и входной скорости, теперь они могут обеспечивать хорошую точность с приемлемой эффективностью, несмотря на высокие коэффициенты скрытой мощности, возникающие в результате базовой топологии KHV, эквивалентной топологии волновых приводов. Использование ступени предварительного зубчатого зацепления также вносит важный вклад в достижение этой цели за счет повышения базовой топологической эффективности. Сверхлегкие конструкции, такие как у SPINEA, демонстрируют интересный потенциал, но в конечном итоге потребуются более революционные подходы, такие как пластиковые материалы, чтобы удовлетворить потребности в более легких коробках передач и больших передаточных числах, необходимых для HRI. Пока это не станет возможным, циклоидные приводы можно рассматривать только для больших полезных нагрузок, когда их больший вес и результирующая инерция не являются критическими для работы. Когда предельная точность не требуется, мер по компенсации люфта можно избежать в пользу повышения эффективности и снижения пусковых моментов. В любом случае следует позаботиться о том, чтобы адекватно справляться с пульсациями крутящего момента, и, возможно, потребуется оставить предварительную ступень редуктора, чтобы обеспечить высокие входные скорости двигателя.
Невозможность планетарных редукторов уменьшить люфт при сохранении хорошей производительности и ограниченная жесткость на кручение ограничивают их использование в промышленной робототехнике. Тем не менее, PGT чрезвычайно универсальны, о чем свидетельствует их широкое использование во многих современных промышленных устройствах. И они по своей природе эффективны, надежны и относительно просты — дешевы — в производстве. Это может объяснить недавний интерес робототехников к PGT, а также то, почему пять из шести изученных здесь инновационных редукторов основаны на конфигурации PGT с высоким передаточным числом: топологии Wolfrom. Многообещающими характеристиками являются лучшая топологическая эффективность в сочетании с улучшением эффективности зацепления за счет модификации профиля или еще один шаг вперед, заключающийся в замене зубьев роликовыми контактами. В сочетании с возможностями, открываемыми их полой топологией, эти элементы потенциально могут привести к возвращению PGT в робототехнику.
Наше исследование показывает, что большая универсальность технологий редукторов, используемых в робототехнике, представляет собой серьезную проблему для прямого сравнения их характеристик. Как показывают примеры люфта и максимальной входной скорости, адекватные модификации конструкции могут соответствующим образом компенсировать большинство первоначальных слабых мест определенной технологии за счет компромиссов в других аспектах, обычно включая эффективность, размер, вес и стоимость. Точно так же большие коэффициенты скрытой мощности указывают на значительный топологический недостаток с точки зрения эффективности, но его также можно — по крайней мере частично — компенсировать соответствующими модификациями. Таким образом, эффект обучения заключается в том, что выбор подходящей технологии редуктора для определенного применения pHRI является чрезвычайно сложным процессом, требующим глубокого понимания основных недостатков, возможностей улучшения и производных компромиссов каждой технологии. Следовательно, наша первоначальная цель исследования, заключающаяся в том, чтобы внести вклад в простую таблицу выбора, способную помочь неопытным инженерам-робототехникам в выборе подходящих технологий редукторов для их роботизированных устройств, не может быть достигнута. Вместо этого в этом документе собраны и объяснены основные параметры выбора и связанные с ними проблемы в каждой из доступных технологий, чтобы помочь инженерам-робототехникам pHRI развить необходимые навыки, необходимые для осознанного выбора подходящей, индивидуально оптимизированной коробки передач.
Два важных аспекта роботизированных редукторов для pHRI, к сожалению, не могут быть адекватно оценены в нашем исследовании на данном этапе: шум и стоимость. По мере того, как роботизированные устройства приближаются к человеку, шум привлекает все больше внимания робототехников. Редукторы, безусловно, представляют собой важный источник шума (воздушного и структурного), но, к сожалению, два основных ограничения рекомендуют исключить шум из нашего анализа на данном этапе. Во-первых, большинство производителей коробок передач еще не предоставляют количественные оценки шумовых характеристик, а когда они это делают, они склонны следовать другим методам испытаний, которые также не особенно подходят для условий эксплуатации в pHRI. Во-вторых, современные технологии коробок передач все еще должны пройти процесс оптимизации шума.
Стоимость также является важным параметром, позволяющим сделать технологии pHRI более доступными, и поэтому она становится важной для выбора подходящих редукторов для будущих робототехнических технологий. К сожалению, и здесь научному сообществу недоступна недостаточная справочная информация, чтобы можно было систематически и справедливо оценивать крупномасштабный стоимостной потенциал определенной технологии редукторов. Прежде чем можно будет определить подходящую основу для оценки этого потенциала, требуется большой объем исследовательской работы, которая явно выходит за рамки нашего исследования.
Эти два ограничения определяют основные рекомендации авторов для интересных будущих направлений исследований. Определение стандартных условий испытаний на воздушный и структурный шум в редукторах, особенно адаптированных к типичным условиям эксплуатации и потребности в pHRI, могло бы позволить провести прямое сравнение различных технологий и способствовать их оптимизации шума. Кроме того, компиляция доступных моделей затрат для производственных процессов, связанных с изготовлением редукторов, и их адаптация к особенностям конкретных технологий, используемых в робототехнике, позволила бы составить основу для оценки крупномасштабного стоимостного потенциала (и барьеров) различные технологии.
Вклад авторов
Все авторы участвовали в предварительной работе, связанной с этой темой исследования, и внесли свой вклад в концептуализацию структуры, представленной в рукописи. PG работал над созданием подходящей системы оценки для проведения анализа редуктора и взял на себя инициативу в написании рукописи и придании ей текущей формы. PG и ES в равной степени способствовали выявлению потенциально подходящих технологий и их анализу с помощью фреймворка. Все авторы прочитали корректуру и внесли свой вклад в окончательную версию статьи.
Финансирование
SC, ES (докторская степень SB) и TV (постдокторская степень SB) являются научными сотрудниками Исследовательского фонда Фландрии — Fonds voor Wetenschappelijk Onderzoek (FWO). Эта работа частично финансировалась исследовательской и инновационной программой Horizon 2020 Европейского Союза в рамках соглашения о гранте № 687662 — проект SPEXOR.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы благодарят профессора Ясутаку Фудзимото из Йокогамского национального университета, а также компании Neugart GmbH, Harmonic Drive SE, Sumitomo Drive Germany GmbH, Genesis Robotics, Innovative Mechatronic Systems B.V., Stam s.r.l. и Wittenstein Galaxy GmbH за любезную поддержку и разъяснения, а также за предоставление нам разрешения на использование включенных изображений их устройств.
Дополнительный материал
Дополнительный материал к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/frobt.2020.00103/full#supplementary-material
Ссылки
Albu-Schäffer, A. , Eiberger, O., Grebenstein, M., Haddadin, S., Ott, C., Wimbock, T., et al. (2008). Мягкая робототехника. Робот IEEE. автомат. Маг. 15, 20–30. doi: 10.1109/MRA.2008.927979
Полный текст CrossRef | Google Scholar
Arigoni, R., Cognigni, E., Musolesi, M., Gorla, C., and Concli, F. (2010). «Планетарные редукторы: эффективность, люфт, жесткость» в VDI International Conference on Gears (Мюнхен).
Google Scholar
Арнаудов К. и Караиванов Д. (2005). «Высшие составные планетарные зубчатые передачи» в Международной конференции VDI по зубчатым передачам , Vol. 1904 г. (Мюнхен: VDI-Bericht), 327–344.
Барбагелата, А., и Корсини, Р. (2000). Riduttore Ingranaggi Conici Basculanti . Патент Италии № IT SV20000049A1. Рим: Ufficio Italiano Brevetti e Marchi.
Барбагелата, А., Эллеро, С., и Ландо, Р. (2016). Планетарный редуктор . Европейский патент № EP2975296A2. Мюнхен: Европейское патентное ведомство.
Брасситос, Э. , и Джалили, Н. (2017). Проектирование и разработка малогабаритного высокомоментного роботизированного привода для космических механизмов. Дж. Мех. Робот. 9, 061002-1–061002-11. doi: 10.1115/1.4037567
Полный текст CrossRef | Google Scholar
Брасситос, Э., и Джалили, Н. (2018). «Определение характеристик жесткости, трения и кинематических ошибок в трансмиссиях с зубчатыми подшипниками», в ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference 9.0213 (Квебек: цифровая коллекция Американского общества инженеров-механиков). doi: 10.1115/DETC2018-85647
Полный текст CrossRef | Google Scholar
Brassitos, E., Mavroidis, C., and Weinberg, B. (2013). «Привод с зубчатым подшипником: новый компактный привод для роботизированных соединений», в ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Портленд, Орегон: цифровая коллекция Американского общества инженеров-механиков). doi: 10.1115/DETC2013-13461
Полнотекстовая перекрестная ссылка | Google Scholar
Брасситос Э., Вайнберг Б., Цинчао К. и Мавроидис К. (2019). Контактная система изогнутых подшипников . Патент США № US10174810B2. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Каланка А., Мурадоре Р. и Фиорини П. (2015). Обзор алгоритмов податливого управления роботами с жесткой и фиксированной податливостью. IEEE/ASME Trans. мех. 21, 613–624. doi: 10.1109/ТМЕЧ.2015.2465849
Полнотекстовая перекрестная ссылка | Google Scholar
Карбоун Г., Мангиаларди Л. и Мантриота Г. (2004). Сравнение характеристик полных и полутороидальных тяговых приводов. Мех. Мах. Теория 39, 921–942. doi: 10.1016/j.mechmachtheory.2004.04.003
CrossRef Полный текст | Академия Google
CAxMan (2020). х3020 проекта 680448 Евросоюза. Презентация варианта использования 1: NuGear . Доступно в Интернете по адресу: https://www. caxman.eu/en/use-cases/nugear/ (по состоянию на 30 апреля 2020 г.).
Сетинкунт, С. (1991). Вопросы оптимального проектирования в высокоскоростных высокоточных сервосистемах движения. Мехатроника 1, 187–201. doi: 10.1016/0957-4158(91)-A
CrossRef Полный текст | Google Scholar
Чен К. и Анхелес Дж. (2006). Поток виртуальной мощности и механические потери мощности в планетарных зубчатых передачах. ASME J. Мех. Дес. 129, 107–113. doi: 10.1115/1.2359473
Полный текст CrossRef | Google Scholar
Чен Д. З. и Цай Л. В. (1993). Кинематический и динамический синтез зубчатых робототехнических механизмов. Дж. Мех. Дес. 115, 241–246. doi: 10.1115/1.2919183
Полный текст CrossRef | Google Scholar
Криспель С., Лопес-Гарсия П., Верстратен Т., Конвенс Б., Саренс Э., Вандерборхт Б. и Лефебер Д. (2018). «Представляем составные планетарные шестерни (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов», в International Symposium on Wearable Robotics (Пиза), 485–489. дои: 10.1007/978-3-030-01887-0_94
CrossRef Полный текст | Google Scholar
Де Сантис, А., Сицилиано, Б., Де Лука, А., и Бикки, А. (2008). Атлас физического взаимодействия человека и робота. Мех. Мах. Теория 43, 253–270. doi: 10.1016/j.mechmachtheory.2007.03.003
CrossRef Полный текст | Google Scholar
Дель Кастильо, Дж. М. (2002). Аналитическое выражение КПД планетарных зубчатых передач. Мех. Мах. Теория 37, 197–214. дои: 10.1016/S0094-114X(01)00077-5
Полнотекстовая перекрестная ссылка | Google Scholar
Дрессчер Д., де Врис Т. Дж. и Страмиджиоли С. (2016). «Выбор мотор-редуктора для обеспечения энергоэффективности», в 2016 Международная конференция IEEE по передовой интеллектуальной мехатронике (AIM) (Банф, AB: IEEE), 669–675. doi: 10.1109/AIM.2016.7576845
Полный текст CrossRef | Google Scholar
Фудзимото, Ю. (2015). Планетарная передача и метод ее проектирования . Патент Японии № JP2015164100. Токио: Патентное ведомство Японии.
Фудзимото Ю. и Кобусе Д. (2017). «Роботизированные приводы с высоким обратным ходом», на Международном семинаре IEEJ по обнаружению, срабатыванию, управлению движением и оптимизации (SAMCON) (Нагаока), IS2–1.
ГАМ (2020). Волновой редуктор GSL . Каталог.
ГЕНЕЗИС (2018). Усилитель крутящего момента Reflex — залог будущего движения . Техническое обновление Общение.
GENESIS Robotics (2020). Радиальный ДВИГАТЕЛЬ LiveDrive® [брошюра] . Доступно в Интернете по адресу: https://genesisrobotics.com/products/livedrive-radial-motor/ (по состоянию на 30 апреля 2020 г.).
Гиберти, Х., Чинквемани, С., и Леньяни, Г. (2010). Влияние механических характеристик трансмиссии на выбор мотор-редуктора. Мехатроника 20, 604–610. doi: 10.1016/j.mechatronics.2010.06.006
CrossRef Полный текст | Google Scholar
Жирар, А., и Асада, Х. Х. (2017). Использование динамики естественной нагрузки с приводами с переменным передаточным числом. Робот IEEE. автомат. лат. 2, 741–748. doi: 10.1109/LRA.2017.2651946
Полный текст CrossRef | Академия Google
Горла, К., Даволи, П., Роза, Ф., Лонгони, К., Киоцци, Ф., и Самарани, А. (2008). Теоретический и экспериментальный анализ циклоидного редуктора. Дж. Мех. Дес. 130:112604. doi: 10.1115/1.2978342
Полный текст CrossRef | Google Scholar
Groothuis, S.S., Folkertsma, G.A., and Stramigioli, S. (2018). Общий подход к достижению стабильности и безопасного поведения в распределенных роботизированных архитектурах. Фронт. Робот. АИ 5:108. дои: 10.3389/frobt.2018.00108
CrossRef Полный текст | Google Scholar
Хаддадин С., Альбу-Шеффер А. и Хирцингер Г. (2009). Требования к безопасным роботам: измерения, анализ и новые идеи. Междунар. Дж. Робот. Рез , 28, 1507–1527. doi: 10.1177/0278364
3970CrossRef Full Text | Google Scholar
Хаддадин С. и Крофт Э. (2016). «Физическое взаимодействие человека и робота», в Springer Handbook of Robotics (Cham: Springer), 1835–1874. дои: 10.1007/978-3-319-32552-1_69
Полный текст CrossRef | Google Scholar
HALODI Robotics (2018). МОТОР ПРЯМОГО ПРИВОДА Revo1™ [брошюра], Moss. Доступно в Интернете по адресу: https://www.halodi.com/revo1 (по состоянию на 30 апреля 2020 г.).
Хэм, Р. В., Шугар, Т. Г., Вандерборхт, Б., Холландер, К. В., и Лефебер, Д. (2009). Совместимые конструкции приводов. Робот IEEE. автомат. Маг. 16, 81–94. doi: 10.1109/MRA.2009.933629
Полный текст CrossRef | Академия Google
Harmonic Drive A.G. (2014) Технические данные Наборы компонентов CSD-2A . Каталог.
Хлебаня Г. и Куловец С. (2015). «Разработка плоскоцентрической коробки передач на основе S-образной геометрии», в 11. Kolloquium Getriebetechnik (Мюнхен), 205–216.
Google Scholar
Хоган, Н. (1984). «Контроль импеданса: подход к манипулированию», , 1984 г., Американская конференция по управлению, (Сан-Диего, Калифорния: IEEE), 304–313. doi: 10. 23919/ACC.1984.4788393
Полнотекстовая перекрестная ссылка | Google Scholar
Хори К. и Хаяши И. (1994). Максимальная эффективность традиционных механических парадоксальных планетарных передач для редуктора. Пер. Япония. соц. мех. англ. 60, 3940–3947. doi: 10.1299/kikaic.60.3940
CrossRef Full Text
Hunter, I.W., Hollerbach, J.M., and Ballantyne, J. (1991). Сравнительный анализ приводных технологий для робототехники. Робот. Ред. 2, 299–342.
Google Scholar
IMSystems (2019). Архимед Драйв. IMSystems—Drive Innovation [брошюра], Делфт.
Икбал, Дж., Цагаракис, Н.Г., и Колдуэлл, Д.Г. (2011). «Проектирование носимого оптимизированного ручного экзоскелета с прямым приводом», в Международной конференции по достижениям в области компьютерно-человеческих взаимодействий (ACHI) (Gosier).
Реферат PubMed | Google Scholar
Канаи Ю. и Фудзимото Ю. (2018). «Управление без датчика крутящего момента для экзоскелета с электроприводом с использованием приводов с сильным обратным ходом», в IECON 2018–44 Ежегодная конференция Общества промышленной электроники IEEE (Вашингтон, округ Колумбия: IEEE), 5116–5121. doi: 10.1109/IECON.2018.85
CrossRef Полный текст | Google Scholar
Капелевич А. и AKGears LLC (2013). Анализ планетарных приводов с высоким передаточным числом. Ratio 3, 10.
Google Scholar
Караяннидис Ю., Друкас Л., Папагеоргиу Д. и Доулгери З. (2015). Управление роботом для выполнения задач и повышения безопасности при ударе. Фронт. Робот. АИ 2:34. doi: 10.3389/frobt.2015.00034
Полный текст CrossRef | Google Scholar
Кашири Н., Абате А., Абрам С. Дж., Альбу-Шаффер А., Клэри П. Дж., Дейли М. и др. (2018). Обзор принципов энергоэффективного движения роботов. Фронт. Робот. АИ 5:129. doi: 10.3389/frobt.2018.00129
Полный текст CrossRef | Google Scholar
Kim, J., Park, F.C., Park, Y., and Shizuo, M. (2002). Проектирование и расчет сферической бесступенчатой трансмиссии. Дж. Мех. Дез . 124, 21–29. doi: 10.1115/1.1436487
Полный текст CrossRef | Google Scholar
Классен, Дж. Б. (2019). Дифференциальный планетарный редуктор . Международный патент № WO2019/051614A1. Женева: Всемирная организация интеллектуальной собственности, Международное бюро.
Google Scholar
Коряков-Савойский Б., Алексахин И., Власов И. П. (1996). Система передач . Патент США № US5505668A. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Ли, С. (2014). «Новейшие технологии проектирования зубчатых передач с большими передаточными числами», в Proceedings of International Gear Conference (Lyon), 427–436. doi: 10.1533/9781782421955.427
CrossRef Full Text | Google Scholar
Луман, Дж. (1996). Zahnradgetriebe (редукторные механизмы) . Берлин: Springer-Verlag. doi: 10.1007/978-3-540-89460-5
CrossRef Полный текст
Лопес-Гарсия П., Криспел С., Верстратен Т., Саеренс Э., Конвенс Б., Вандерборхт Б. ., и Лефебер, Д. (2018). «Проектирование планетарного редуктора для активной носимой робототехники на основе анализа видов и последствий отказов (FMEA)», в Международный симпозиум по носимой робототехнике (Пиза), 460–464. doi: 10.1007/978-3-030-01887-0_89
Полный текст CrossRef | Google Scholar
Лопес-Гарсия П., Криспель С., Верстратен Т., Саренс Э., Вандерборхт Б. и Лефебер Д. (2019a). «Коробки передач Wolfrom для легкой робототехники, ориентированной на человека», в Proceedings of the International Conference on Gears 2019 (Мюнхен: VDI), 753–764.
Лопес-Гарсия П., Криспель С., Верстратен Т., Саренс Э., Вандерборхт Б. и Лефебер Д. (2019 г.б). «Настройка планетарных зубчатых передач для помощи и воспроизведения человеческих конечностей», в MATEC Web of Conferences (Варна: EDP Sciences), 01014. doi: 10.1051/matecconf/201928701014
CrossRef Полный текст | Google Scholar
Лафлин К., Альбу-Шеффер А., Хаддадин С., Отт К., Стеммер А., Вимбок Т. и Хирцингер Г. (2007). Легкий робот DLR: концепции проектирования и управления роботами в среде человека. Индивидуальный робот. Междунар. Дж . 34, 376–385. дои: 10.1108/01439
0774386
Полнотекстовая перекрестная ссылка | Google Scholar
Макмиллан Р. Х. и Дэвис П. Б. (1965). Аналитическое исследование систем разветвленной передачи мощности. Дж. Мех. англ. Наука . 7, 40–47. doi: 10.1243/JMES_JOUR_1965_007_009_02
Полный текст CrossRef | Google Scholar
Майр, К. (1989). Präzisions-Getriebe für die Automation: Grundlagen und Anwendungsbeispiele . Ландсберг: Verlag Moderne Industrie.
Мишель, С. (2015). Эволюция логарифмической спирали. Машиненмаркт № . 18, 40–42.
Михайлидис, А., Атанасопулос, Э., и Оккас, Э. (2014). «Эффективность циклоидного редуктора», в International Gear Conference (Lyon Villeurbanne), 794–803. doi: 10.1533/9781782421955.794
Полный текст CrossRef | Google Scholar
Морозуми, М. (1970). Эвольвентное внутреннее зацепление со смещенным профилем . Патент США № US3546972A. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Mueller, HW (1998). Die Umlaufgetriebe: Auslegung und vielseitige Anwendungen . Берлин; Гейдельберг: Springer-Verlag. doi: 10.1007/978-3-642-58725-2
Полный текст CrossRef | Google Scholar
Мульцер, Ф. (2010). Systematik hoch übersetzender koaxialer getriebe (Докторская диссертация). Технический университет Мюнхена, Мюнхен, Германия.
Google Scholar
Musser, CW (1955). Волновая передача . Патент США № US2
3А. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.НАБТЕСКО (2018). Прецизионный редуктор RV — серия N . Кат.180410. Каталог.
Нойгарт, А. Г. (2020). PLE Economy Line . Каталог.
Ниманн, Г., Винтер, Х., и Хён, Б. Р. (1975). Maschinenelemente, Vol. 1 . Берлин; Гейдельберг; Нью-Йорк, штат Нью-Йорк: Спрингер.
Google Scholar
Паш, К. А., и Сиринг, В. П. (1983). «О приводных системах высокопроизводительных машин», в Машиностроение (Нью-Йорк, штат Нью-Йорк: Общество машиностроения ASME-AMER), 107–107.
Пеннестри, Э. , и Фройденштейн, Ф. (1993). Механический КПД планетарных зубчатых передач. ASME J. Мех. Дез . 115, 645–651. doi: 10.1115/1.2919239
Полный текст CrossRef | Google Scholar
Петтерссон, М., и Олвандер, Дж. (2009). Оптимизация трансмиссии промышленных роботов. IEEE Trans. Робот. 25, 1419–1424. дои: 10.1109/TRO.2009.2028764
Полнотекстовая перекрестная ссылка | Google Scholar
Фам, А. Д., и Ан, Х. Дж. (2018). Высокоточные редукторы для промышленных роботов, ведущие к четвертой промышленной революции: современное состояние, анализ, проектирование, оценка производительности и перспективы. Междунар. Дж. Точность. англ. Произв. Зеленая технология. 5, 519–533. doi: 10.1007/s40684-018-0058-x
CrossRef Full Text | Google Scholar
Резазаде С. и Херст Дж. В. (2014). «Об оптимальном выборе двигателей и трансмиссий для электромеханических и робототехнических систем», в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 2014 г. (Чикаго, Иллинойс: IEEE), 4605–4611. doi: 10.1109/IROS.2014.6943215
Полный текст CrossRef | Google Scholar
Роос Ф., Йоханссон Х. и Викандер Дж. (2006). Оптимальный выбор двигателя и редуктора в мехатронных приложениях. Мехатроника 16, 63–72. doi: 10.1016/j.mechatronics.2005.08.001
CrossRef Полный текст | Google Scholar
Розенбауэр, Т. (1995). Getriebe für Industrieroboter: Beurteilungskriterien . Kenndaten, Einsatzhinweise: Shaker.
Россман, А. М. (1934). Механический механизм . Патент США № US1970251. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Саренс Э., Криспель С., Гарсия П. Л., Верстратен Т., Дукастель В., Вандерборхт Б. и Лефебер Д. (2019). Законы масштабирования для роботизированных трансмиссий. Мех. Мах. Теория 140, 601–621. doi: 10.1016/j.mechmachtheory.2019.06.027
CrossRef Полный текст | Академия Google
Шафер И., Бурлье П. , Ханчак Ф., Робертс Э. У., Льюис С. Д., Форстер Д. Дж. и Джон К. (2005). «Космическая смазка и характеристики гармонических приводных механизмов», 11-й Европейский симпозиум по космическим механизмам и трибологии, ESMATS 2005 (Люцерн), 65–72.
Google Scholar
Шейнман В., Маккарти Дж. М. и Сонг Дж. Б. (2016). «Механизм и приведение в действие», в Springer Handbook of Robotics (Cham: Springer), 67–90. дои: 10.1007/978-3-319-32552-1_4
CrossRef Полный текст | Google Scholar
Шемпф, Х. (1990). Сравнительный анализ проектирования, моделирования и управления трансмиссиями роботов (кандидатская диссертация). № ВОЗИ-90-43. Департамент машиностроения и Океанографический институт Вудс-Хоул, Массачусетский технологический институт, Кембридж, Массачусетс, США. doi: 10.1575/1912/5431
Полный текст CrossRef | Google Scholar
Шемпф, Х., и Йоргер, Д. Р. (1993). Исследование доминирующих рабочих характеристик трансмиссий роботов. ASME J. Мех. Дес. 115, 472–482. doi: 10.1115/1.2919214
Полный текст CrossRef | Google Scholar
Шорш, Дж. Ф. (2014). Составной планетарный фрикционный привод . Патент Нидерландов № 2013496. Де Хааг: Octrooicentrum Nederland.
Google Scholar
Шрайбер, Х. (2015). «Revolutionäres getriebeprinzip durch neuinterpretation mashinelementen—Die WITTENSTEIN Galaxie®-Kinematik», in Dresdner Maschinenelemente Kolloquium, DMK (Дрезден), 2015.S.
Шрайбер, Х., и Рётлингсхёфер, Т. (2017). «Кинематическая классификация коробки передач, состоящей из отдельных упорных зубьев, и ее преимущества по сравнению с существующими подходами», Международная конференция по зубчатым передачам , ICG (Мюнхен).
Шрайбер, Х., и Шмидт, М. (2015). Гетрибе. Патент Германии № DE 10 2015 105 525 A1. Мюнхен: Deutsches Patent- und Markenamt.
Google Scholar
Sensinger, JW (2010). «Выбор двигателей для роботов с использованием биомиметических траекторий: оптимальные ориентиры, обмотки и другие соображения», в Международная конференция IEEE по робототехнике и автоматизации 2010 г. (Анкоридж, AK: IEEE), 4175–4181. doi: 10.1109/ROBOT.2010.5509620
CrossRef Full Text | Google Scholar
Sensinger, JW (2013). КПД высокочувствительных зубчатых передач, таких как циклоидные приводы. ASME J. Мех. Дес. 135, 071006-1–071006-9. doi: 10.1115/1.4024370
Полный текст CrossRef | Google Scholar
Сенсингер Дж. В., Кларк С. Д. и Шорш Дж. Ф. (2011). «Внешние и внутренние роторы в бесщеточных двигателях роботов», в Международная конференция IEEE по робототехнике и автоматизации 2011 г. (Монреаль, контроль качества: IEEE), 2764–2770. doi: 10.1109/ICRA.2011.5979940
Полный текст CrossRef | Google Scholar
Сок С., Ван А., Чуах М.Ю.М., Хюн Д.Дж., Ли Дж., Оттен Д.М. и др. (2014). Принципы проектирования энергоэффективного передвижения на ногах и их реализация на роботе-гепарде Массачусетского технологического института. IEEE/ASME Trans. мех. 20, 1117–1129. doi: 10.1109/TMECH.2014.2339013
CrossRef Full Text | Академия Google
Сицилиано Б. , Шавикко Л., Виллани Л. и Ориоло Г. (2010). Робототехника: моделирование, планирование и управление . Лондон: Springer Science and Business Media. doi: 10.1007/978-1-84628-642-1
Полный текст CrossRef | Google Scholar
Слэттер, Р. (2000). Weiterentwicklung eines Präzisionsgetriebes für die Robotik . Сент-Леонард: Antriebstechnik.
Google Scholar
SPARC (2015). Многолетняя дорожная карта Robotics 2020 для робототехники в Европе Horizon 2020 Call ICT-2017 . Доступно в Интернете по адресу: https://www.eu-robotics.net/sparc/about/roadmap/index.html (по состоянию на 30 апреля 2020 г.).
СПИНЕА (2017). TwinSpin — Высокоточные редукторы — Präzisionsgetriebe . Каталог.
Страмиджиоли, С., ван Оорт, Г., и Дертьен, Э. (2008). «Концепция нового энергоэффективного привода», в 2008 г. Международная конференция IEEE/ASME по передовой интеллектуальной мехатронике (Сиань: IEEE), 671–675. doi: 10.1109/AIM.2008.4601740
Полный текст CrossRef | Академия Google
СУМИТОМО (2017). Fine Cyclo® Spielfreie Prezisionsgetriebe . Каталог 9 DE 02/2017.
СУМИТОМО (2020). Приводы управления движением E-Cyclo®. Каталог F10001E-1.
Талбот, Д., и Кахраман, А. (2014). «Методология прогнозирования потерь мощности в планетарных передачах», в International Gear Conference (Lyon-Villeurbanne), 26–28. doi: 10.1533/9781782421955.625
CrossRef Full Text
Tomcyk, H. (2000). Регулировочное устройство с планетарными передачами . Европейский патент № EP1244880B1. Мюнхен: Европейское патентное ведомство.
Google Scholar
Toxiri, S., Näf, M.B., Lazzaroni, M., Fernández, J., Sposito, M., Poliero, T., et al. (2019). «Экзоскелеты для поддержки спины для профессионального использования: обзор технологических достижений и тенденций», в IISE Trans. Занять. Эргон. Гум. Факторы 7, 3–4, 237–249. doi: 10.1080/24725838.2019.1626303
CrossRef Полный текст | Google Scholar
Van de Straete, H.J., Degezelle, P. , De Schutter, J. и Belmans, R.J. (1998). Критерий выбора серводвигателя для мехатронных приложений. IEEE/ASME Trans. мех. 3, 43–50. doi: 10.1109/3516.662867
CrossRef Полный текст | Google Scholar
Veale, AJ, and Xie, SQ (2016). На пути к совместимым и носимым роботизированным ортезам: обзор текущих и новых технологий приводов. Мед. англ. физ. 38, 317–325. doi: 10.1016/j.medengphy.2016.01.010
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Верстратен Т., Фурнемон Р., Матийссен Г., Вандерборхт Б. и Лефебер Д. (2016). «Потребление энергии редукторными двигателями постоянного тока в динамических приложениях: сравнение подходов к моделированию», в Робот IEEE. автомат. лат. 1, 524–530. doi: 10.1109/LRA.2016.2517820
Полный текст CrossRef | Google Scholar
Враниш, Дж. М. (1995). Бескаркасный планетарный привод с защитой от люфта . Патент США № US5409431. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Враниш, Дж. М. (2006). Подшипники с частичным зубчатым зацеплением . Патент США № US2006/0219039A1. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Ван А. и Ким С. (2015). «Эффективность направления в зубчатых трансмиссиях: характеристика обратного движения для улучшения проприоцептивного контроля», в 2015 Международная конференция IEEE по робототехнике и автоматизации (ICRA) (Сиэтл, Вашингтон: IEEE), 1055–1062. doi: 10.1109/ICRA.2015.7139307
Полный текст CrossRef | Google Scholar
Вайнберг Б., Мавроидис К. и Враниш Дж. М. (2008). Подшипник шестерни привода . Патент США № US2008/0045374A1. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Google Scholar
Исследование WinterGreen (2018). Прецизионные редукторы с волновым редуктором и редукторы RV и RD: доля рынка, стратегия и прогнозы в мире, 2018–2024 гг. . WIN0418002.
WITTENSTEIN AG (2020). Технические брошюры SP+ и TP+ Getrieben. Каталог.
Вольф, А. (1958). Die Grundgesetze der Umlaufgetriebe . Брауншвейг: Фридр. Видег и Зон.
Вольфром, У. (1912). Der Wirkungsgrad von Planetenrädergetrieben. Werkstattstechnik 6, 615–617.
Ю Д. и Бичли Н. (1985). О механическом КПД дифференциальной передачи. ASME J. Мех. Транс. автомат. 107, 61–67. doi: 10.1115/1.3258696
Полный текст CrossRef | Google Scholar
Зинн М., Рот Б., Хатиб О. и Солсбери Дж. К. (2004). Новый подход к управлению роботом, удобным для человека. Междунар. Дж. Робот. Рез. 23, 379–398. doi: 10.1177/0278364
2193Полный текст CrossRef | Академия Google
Разница между AGV и мобильными роботами
Перейти к содержимому
100% принадлежит сотрудникам, основана в 1954 году
855.889.0092
Поиск
Контакт
855. 889.0092
Новая волна совместной робототехники уже здесь! Мобильные роботы и автоматизированные управляемые транспортные средства (AGV) — это способ автономной транспортировки груза на большие расстояния. Груз может быть каким угодно: запчасти, другие роботы, камеры, почта и прочее.
Современная рабочая среда постоянно меняется, поскольку задачи становятся более разнообразными в зависимости от множества критериев. AGV были традиционным методом автономного транспорта, но мобильные роботы адаптировались для обеспечения поддержки, требуемой сегодняшним конечным пользователем, такой как менее предсказуемая планировка этажей и использование рабочих станций. Революция в мире автономных транспортных средств — это не само автономное транспортное средство, а то, КАК транспортное средство достигает своих целей и как оно стало гибкой платформой.
Определение мобильных роботов и AGV
Не существует четкого определения того, что означает мобильный робот, но чаще всего под ним понимается устройство, которое может автономно перемещаться с места на место для достижения ряда целей. Мобильные роботы существуют уже некоторое время. Если мы подумаем об этом на самом базовом уровне, маленький пылесос, который бегает по вашему полу, — это мобильный робот. С тех пор технология значительно продвинулась вперед. Сегодня они используются на заводах, в военных операциях, в здравоохранении, в поисково-спасательных операциях, в качестве охранников и в быту.
Два действительно крутых передовых применения мобильных роботов — это горнодобывающая промышленность и военные. Вы знаете огромные самосвалы на горнодобывающих предприятиях с колесами размером с вашу машину? Это мобильные роботы. Кроме того, обнаружение и обезвреживание наземных мин является важной мировой проблемой, и военные используют для их обнаружения мобильных роботов. Вы также можете подумать, а как насчет автомобиля Google? Да, это тоже мобильный робот.
Следующая мысль, которая может прийти вам в голову: «Подождите, у нас уже много лет на наших заводах стоят автоматизированные транспортные средства», и это может быть правдой. AGV были изобретены в 50-х годах и десятилетиями эффективно работают на заводах. Итак, у нас есть мобильные роботы и AGV? В чем разница?
Автоматизированные управляемые транспортные средства
AGV делает именно то, что говорит название. Он управляется автоматически. Но чем оно руководствуется? Существует три основных типа систем наведения, используемых для того, чтобы «сказать» роботу, куда ему нужно идти.
- Направление проводов использует провода, встроенные в пол завода, которые индуктивно воспринимаются транспортным средством, чтобы определить его поперечное положение.
- Инерциальное наведение использует гироскопы и отслеживает положение колеса, чтобы определить его положение. Затем магниты размещаются в стратегически важных местах для перезагрузки системы. Это очень важно, потому что помогает справиться с неизбежным дрейфом системы.
- Лазерное наведение использует лазерный излучатель-приемник. Он распознает световозвращающие ориентиры, стратегически расположенные по всему заводу. Ощущая ориентиры, транспортное средство может затем триангулировать свое положение.
AGV могут быть очень впечатляющими. Я видел случаи, когда весь заводской этаж был обозначен проложенными в земле проводами. Когда машина готова к разгрузке, AGV размером с грузовик выезжает, забирает все детали сразу и возвращается домой.
Мобильные роботы
Задача мобильного робота очень похожа на задачу AGV: доставить мои вещи из пункта А в пункт Б . Однако то, как это происходит, совершенно иное. Вместо использования инфраструктуры (проводов, отражающих маркеров и т. д.) все датчики и планирование пути выполняются роботом на борту. Мобильный робот использует чувствительные компоненты, встроенные в машину, для обнаружения окружающей среды. Обычно используемые датчики представляют собой сканеры площади, диффузные лазерные датчики и камеры.
Обычно при первой установке мобильного робота он перемещается по заводу с работающими датчиками. После сбора всех данных с цеха создается виртуальная карта всего цеха. Это чрезвычайно полезно, потому что дает роботу возможность знать, куда он движется, без использования сенсорной инфраструктуры, а также позволяет очень легко обучить его другой карте. Благодаря внутренней карте и коллекции датчиков в реальном времени робот может самостоятельно перемещаться по окружающей среде, прокладывая собственные пути и ощущая постоянно меняющиеся производственные цеха.
Кроме того, робот будет использовать различные алгоритмы для локализации и навигации. Эти системы обычно называют алгоритмами SLAM: одновременная локализация и сопоставление . Программное обеспечение может распознавать ключевые особенности среды, чтобы помочь локализовать себя. Например, если есть странно изогнутая стена, робот будет использовать эту функцию, чтобы локализовать себя и «перепроверить», где он находится на своей карте. Этот метод уменьшает величину дрейфа в системе.
| AGV | Mobile Robot | |
|---|---|---|
| Навигация | Инфраструктура: Wire Guidance, отражающая маркеровка, радиочастота и т. Д. Все измерения выполняются на борту. Живо воспринимает окружающую среду | |
| Препятствия | Препятствия останавливают AGV | Обходит препятствия и находит наилучший путь в соответствии со своей внутренней картой |
| Гибкость | Новые треки и инфраструктура, которые будут установлены | . Легко переименоваться и преподают новые направления и целы |
| Exprandability | ||
| Exprandability | ||
| Exprantability | ||
| Exprantability | ||
| Advanceability | ||
| . управляется пакетом программного обеспечения для автопарка | ||
| Зарядка | Док-станция | Док-станция |
Что лучше, зависит от вашей ситуации.
Людям и роботам становится необходимо использовать одно и то же рабочее пространство. Это привело к необходимости в том, чтобы роботы могли общаться и чувствовать, когда объекты и люди находятся вокруг них. AGV и мобильные роботы существуют уже некоторое время. Однако мобильные роботы только сейчас появляются в среде промышленных предприятий. Два самых больших различия между AGV и мобильным роботом заключаются в том, что мобильный робот не использует инфраструктуру для навигации и может самостоятельно находить новые пути.
Если вам нужна роботизированная помощь на рабочем месте, у компании Cross есть много ресурсов, которые помогут вам выбрать, запрограммировать и поддержать ваше новое дополнение.
Узнайте, как наша команда по автоматизации может помочь улучшить качество, повысить эффективность и снизить риски в вашей работе
- 855.889.0092
МагазинКрест
Подпишитесь на нашу рассылку, чтобы получать отраслевые новости, образовательные материалы и обновления продуктов удобным для вас способом.
Загрузите нашу последнюю версию W9
© 2022 Компания Кросс. Все права защищены | Политика конфиденциальности | Условия использования
Совместная разработка и хостинг от Drum Creative
Inception Drive: компактная бесступенчатая трансмиссия для робототехники
Как понял Верн, Гражданская война в США (во время которой
было выполнено 60 000 ампутаций) положило начало современной эре протезирования в Соединенных Штатах благодаря федеральному финансированию и волне патентов на дизайн, поданных протезистами-предпринимателями. Две мировые войны укрепили коммерческую индустрию протезирования как в Соединенных Штатах, так и в Западной Европе, а продолжающаяся война с терроризмом помогла ей превратиться в индустрию с оборотом в 6 миллиардов долларов США по всему миру. Однако эти недавние инвестиции не являются результатом непропорционально большого количества ампутаций в ходе военных конфликтов: около 1500 американских солдат и 300 британских солдат лишились конечностей в Ираке и Афганистане. Потеря конечностей среди населения в целом затмевает эти цифры. Только в Соединенных Штатах более 2 миллионов человек живут с потерей конечностей, при этом 185 000 человек ежегодно подвергаются ампутации. Гораздо меньшее число детей — от 1500 до 4500 детей в год — рождаются с разницей или отсутствием конечностей, включая меня.
Сегодня люди, разрабатывающие протезы, как правило, инженеры с добрыми намерениями, а не сами инвалиды. Мясистые обрубки мира служат хранилищем мечтаний этих дизайнеров о высокотехнологичном, сверхчеловеческом будущем. Я знаю это, потому что на протяжении всей своей жизни я был оснащен одними из самых
самые передовые протезы на рынке. После рождения без левого предплечья я был одним из первых младенцев в Соединенных Штатах, которым снабдили миоэлектрическим протезом руки — электронным устройством, управляемым мышцами носителя, напрягающимися от датчиков внутри гнезда протеза. С тех пор я носил множество протезов рук, каждый из которых стремился к идеальному воспроизведению человеческой руки — иногда за счет эстетики, иногда за счет функциональности, но всегда предназначенный для имитации и замены того, что отсутствовало.
За время моей жизни миоэлектрические руки превратились из когтеобразных конструкций в мультизахватные, программируемые, анатомически точные копии человеческой руки, большинство из которых стоит десятки тысяч долларов. Журналисты не могут налюбоваться этими изощренными, многоцелевыми «бионическими» руками с реалистичной силиконовой кожей и органическими движениями, негласно обещая, что инвалидность скоро исчезнет, а любая потерянная конечность или орган будет заменена равноценной копией. Инновации в области протезов рук рассматриваются как соревнование с высокими ставками, чтобы увидеть, что технологически возможно. Тайлер Хейс, генеральный директор стартапа по производству протезов Atom Limbs изложила это в видео WeFunder, которое помогло собрать 7,2 миллиона долларов от инвесторов: «Каждый лунный полет в истории начинался с изрядной доли сумасшествия, от электричества до космических путешествий, и Atom Limbs ничем не отличается».
Мы вовлечены в гонку бионических рук. Но делаем ли мы реальный прогресс? Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают. Каждая новая бионическая рука с несколькими захватами имеет тенденцию быть более сложной, но и более дорогой, чем предыдущая, и с меньшей вероятностью покрывается (даже частично) страховкой. И, как показывают недавние исследования, гораздо более простые и гораздо менее дорогие протезы могут одинаково хорошо выполнять многие задачи, а причудливые бионические руки, несмотря на все их электронные возможности, редко используются для хватания.
Активные руки, такие как этот, изготовленный протезной фирмой Arm Dynamics, дешевле и долговечнее, чем бионические протезы. Насадка от компании Texas Assistive Devices, производящей протезы, рассчитана на очень большой вес, что позволяет автору выполнять упражнения, которые были бы рискованными или невозможными с ее гораздо более дорогой бибионической рукой. Габриэла Хасбун; Макияж: Мария Нгуен для косметики MAC; Волосы: Joan Laqui for Living Proof
Function or Form
В последние десятилетия подавляющее внимание исследований и разработок новых искусственных рук было сосредоточено на совершенствовании различных типов захватов. Многие из самых дорогих рук на рынке отличаются количеством и разнообразием выбираемых цепких захватов. Мой собственный медиа-любимец руки, bebionic от Ottobock, который я получил в 2018 году, имеет силовую рукоятку в форме кулака, щипковые рукоятки и один очень специфический режим с большим пальцем поверх указательного для вежливой передачи кредитной карты. Моя миоэлектрическая рука 21-го века казалась замечательной, пока я не попытался использовать ее для некоторых рутинных задач, где она оказалась еще громоздко и занимает много времени, чем если бы я просто оставил его на диване. Я не мог использовать его, чтобы закрыть дверь, например, задача, которую я могу сделать с моей культей. А без чрезвычайно дорогого дополнения в виде запястья с электроприводом я не мог пересыпать овсянку из кастрюли в миску. Выполнение задач крутым бионическим способом, даже если он имитировал наличие двух рук, явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
Когда я впервые заговорил с Эд Спирс, лектор по робототехнике и машинному обучению в Имперском колледже Лондона, был в своем кабинете поздно ночью, но его все еще волновали роботизированные руки — нынешнее направление его исследований. Спайерс говорит, что антропоморфная роботизированная рука неизбежна, от реальности сегодняшнего протезирования до фантазии научной фантастики и аниме. «На одной из своих первых лекций здесь я показывал отрывки из фильмов и мультфильмов и то, как крутые кинематографисты делают руки роботов», — говорит Спирс. «В аниме Gundam , есть так много крупных планов гигантских рук роботов, хватающих такие вещи, как массивные пушки. Но почему это должна быть человеческая рука? Почему у робота просто нет пистолета вместо руки?»
Пришло время спросить, для кого на самом деле нужны протезы и чего они, как мы надеемся, на самом деле сделают.
Спирс считает, что разработчики протезов слишком увлечены формой, а не функцией. Но он поговорил с ними достаточно, чтобы понять, что они не разделяют его точку зрения: «У меня такое ощущение, что людям нравится идея о том, что люди великие, и что руки делают людей совершенно уникальными». Почти каждый университетский факультет робототехники, который посещает Спирс, занимается разработкой антропоморфных роботов. «Вот как выглядит будущее», — говорит он, и его голос звучит немного раздраженно. «Но часто есть лучшие способы».
Подавляющее большинство людей, пользующихся протезами конечностей, — это люди с односторонней ампутацией — люди с ампутациями, затрагивающими только одну сторону тела, — и они практически всегда используют свою доминирующую «мясистую» руку для деликатных задач, таких как поднятие чашки. Как односторонние, так и двусторонние ампутированные конечности также получают помощь от своего туловища, ступней и других объектов в их окружении; редко задачи выполняются одним протезом. И все же, общие клинические оценки для определения успеха протеза основаны на использовании только протеза без помощи других частей тела. Такие оценки, по-видимому, предназначены для демонстрации возможностей протеза руки, а не для определения того, насколько он полезен в повседневной жизни пользователя. Инвалиды по-прежнему не являются арбитрами стандартов протезирования; мы все еще не в центре дизайна.
Крюк Хосмера [слева], первоначально разработанный в 1920 году, представляет собой оконечное устройство с питанием от тела, которое используется до сих пор. Насадка-молоток [справа] может быть более эффективной, чем насадка-захват, при забивании гвоздей в дерево. Слева: Джон Прието/The Denver Post/Getty Images; Справа: Hulton-Deutsch Collection/Corbis/Getty Images
Протезы в реальном мире
Чтобы узнать, как пользователи протезов живут со своими устройствами,
Спирс руководил исследованием, в котором использовались камеры, надетые на головы участников, для записи ежедневных действий восьми человек с односторонней ампутацией или врожденными различиями конечностей. Исследование, опубликованное в прошлом году в IEEE Transactions on Medical Robotics and Bionics , включал несколько разновидностей миоэлектрических рук, а также систем с питанием от тела, которые используют движения плеча, груди и плеча, передаваемые по кабелю, для механического управления захватом в конце протез. Исследование проводилось, когда Спирс был научным сотрудником лаборатории GRAB Йельского университета, возглавляемой Аароном Долларом. Помимо Доллара, он тесно сотрудничал с аспиранткой Джиллиан Кокран, которая была соавтором исследования.
Просматривая необработанные кадры из исследования, я чувствовал одновременно грусть и чувство товарищества с анонимными пользователями протезов. На роликах видны неуклюжесть, просчеты и случайные падения, знакомые даже очень опытным пользователям протезов рук. Часто протез просто помогает прижать объект к телу, которым можно управлять другой рукой. Также было очевидно, сколько времени люди тратили на подготовку своих миоэлектрических протезов для выполнения задачи — часто требовалось несколько дополнительных секунд, чтобы вручную или с помощью электроники повернуть запястья своих устройств, выровнять объект, чтобы правильно схватить его, и отработать захват. подход. Участник, который повесил бутылку с дезинфицирующим спреем на «крючок» руки, вытирая кухонный стол, похоже, был тем, кто все понял.
В ходе исследования протезы использовались в среднем только для 19 процентов всех зафиксированных манипуляций. В целом протезы использовались в основном для нехватательных действий, а другая, «неповрежденная» рука выполняла большую часть хватания. Исследование выявило большие различия в использовании между теми, у кого неэлектрические протезы с питанием от тела, и теми, у кого есть миоэлектрические протезы. Для пользователей протезов с приводом от тела, у которых ампутация была ниже локтя, почти 80 процентов использования протезов приходилось на движения без захвата — толкание, нажатие, вытягивание, подвешивание и стабилизация. Для миоэлектрических пользователей устройство использовалось для захвата только в 40 процентах случаев.
Что еще более показательно, пользователи с неэлектрическими захватами или разъемными крюками тратили значительно меньше времени на выполнение задач, чем пользователи с более сложными протезами. Спайерс и его команда отметили плавность и скорость, с которой первые приступили к выполнению задач в своих домах. Они могли использовать свои искусственные руки почти мгновенно и даже получать прямую тактильную обратную связь через кабель, который управляет такими системами. Исследование также выявило небольшую разницу в использовании между миоэлектрическими устройствами с одним захватом и более причудливыми миоэлектрическими многошарнирными руками с несколькими захватами, за исключением того, что пользователи, как правило, избегали подвешивания предметов на своих руках с несколькими захватами, по-видимому, из страха сломать их.
«У нас сложилось впечатление, что люди с миоэлектрическими руками с несколькими хватами довольно осторожно подходят к их использованию», — говорит Спирс. Это неудивительно, поскольку большинство миоэлектрических рук стоят более 20 000 долларов, редко получают одобрение страховки, требуют частой профессиональной поддержки для изменения схемы хвата и других настроек, а также требуют дорогостоящих и длительных процессов ремонта. По мере того, как протезные технологии становятся все более сложными и запатентованными, все большую озабоченность вызывает долгосрочная работоспособность. В идеале устройство должно легко ремонтироваться пользователем. И все же некоторые стартапы в области протезирования предлагают модель подписки, при которой пользователи продолжают платить за доступ к ремонту и поддержке.
Несмотря на выводы своего исследования, Спирс говорит, что подавляющее большинство исследований и разработок в области протезирования по-прежнему сосредоточено на совершенствовании способов захвата дорогих высокотехнологичных бионических рук. Он говорит, что даже помимо протезирования исследования манипулирования в исследованиях приматов и робототехники в основном касаются хватания: «Все, что не хватает, просто выбрасывается».
TRS производит широкий ассортимент протезов с приводом от тела для различных хобби и занятий спортом. Каждое приспособление предназначено для определенной задачи, и их можно легко заменить для различных видов деятельности. Fillauer TRS
Цепляясь за историю
Если мы решили, что то, что делает нас людьми, — это наши руки, а то, что делает руку уникальной, — это ее способность хватать, то единственный протез, который у нас есть, — это тот, который прикреплен к запястьям большинства людей. Тем не менее, погоня за максимальной пятизначной хваткой не обязательно является следующим логическим шагом. Фактически, история показывает, что люди не всегда были зациклены на идеальном воссоздании человеческой руки.
Как рассказывается в сборнике эссе 2001 г. Письмо на руках: память и знания в Европе раннего Нового времени , представления о руке развивались на протяжении столетий. «Душа подобна руке; ибо рука есть орудие инструментов», — писал Аристотель в De Anima . Он полагал, что человечество было намеренно наделено проворной и цепкой рукой, потому что только наш уникально разумный мозг мог использовать ее — не как простую утварь, а как инструмент для apprehensio , или «схватывания» мира в прямом и переносном смысле.
Спустя более 1000 лет идеи Аристотеля нашли отклик у художников и мыслителей эпохи Возрождения. Для Леонардо да Винчи рука была посредником между мозгом и миром, и он приложил исключительные усилия в своих анализах и иллюстрациях человеческой руки, чтобы понять ее основные компоненты. Его тщательные исследования сухожилий и мышц предплечья и кисти привели его к выводу, что «хотя человеческая изобретательность делает различные изобретения… она никогда не найдет изобретений более красивых, более подходящих или более прямых, чем природа, потому что в ее изобретениях нет ничего недостающего и ничего лишнего».
Иллюстрации да Винчи вызвали волну интереса к анатомии человека. Тем не менее, при всем тщательном изображении человеческой руки европейскими мастерами, рука рассматривалась скорее как источник вдохновения, чем как объект, который простые смертные могли воспроизвести. На самом деле было широко признано, что хитросплетения человеческой руки свидетельствуют о божественном замысле. Никакая машина, заявил христианский философ Уильям Пейли, не является «более искусственной или более очевидной», чем сгибатели руки, что предполагает преднамеренный замысел Бога.
Выполнение задач крутым бионическим способом, даже если он имитировал наличие двух рук, явно не лучше, чем выполнение вещей по-моему, иногда с помощью моих ног и ступней.
К середине 1700-х годов, когда на глобальном севере произошла промышленная революция, начал формироваться более механистический взгляд на мир, и грань между живыми существами и машинами начала стираться. В своей статье 2003 года «
Wetware восемнадцатого века, — пишет Джессика Рискин, профессор истории Стэнфордского университета, — период между 1730-ми и 1790s был симуляцией, в которой механики искренне пытались сократить разрыв между живыми и искусственными механизмами». В этот период произошли значительные изменения в конструкции протезов конечностей. В то время как механические протезы 16-го века были отягощены железом и пружинами, в протезе 1732 года с приводом от тела использовалась система шкивов для сгибания руки, сделанной из легкой меди. К концу 18 века металл заменили кожей, пергаментом и пробкой — более мягкими материалами, имитирующими живую материю.
Технооптимизм начала 20-го века привел к очередным изменениям в дизайне протезов. Вольф Швейцер, патологоанатом Цюрихского института судебной медицины, человек с ампутированными конечностями. Он владеет широким спектром современных протезов рук и имеет необходимый опыт для их тестирования. Он отмечает, что анатомически правильные протезы рук вырезались и выковывались на протяжении большей части 2000 лет. И все же, по его словам, разрезной крючок 20-го века с приводом от тела «более современен», его конструкция больше стремится сломать форму человеческой руки.
«Рука, приводимая в действие телом, — с точки зрения ее символизма — (по-прежнему) выражает человеко-машинный символизм индустриального общества 1920-х годов».
пишет Швейцер в своем блоге о протезах рук, «когда человек должен был функционировать как заводная шестерня на производственных линиях или в сельском хозяйстве». В оригинальном дизайне крючка Хосмера 1920-х годов петля внутри крючка была помещена только для завязывания обуви, а другая — только для удержания сигарет. Эти дизайны, как сказал мне Ad Spiers, были «невероятно функциональными, функциональность превыше формы. Все части служили определенной цели».
Швейцер считает, что по мере того, как в 20-м веке потребность в ручном труде уменьшалась, протезы, которые были высокофункциональными, но не натуралистичными, затмились новым высокотехнологичным видением будущего: «бионическими» руками. В 2006 году Агентство перспективных оборонных исследовательских проектов США запустило
Революционное протезирование, исследовательская инициатива по разработке следующего поколения протезов рук с «почти естественным» контролем. В рамках программы стоимостью 100 миллионов долларов были созданы два многошарнирных протеза руки (один для исследований, а другой стоимостью более 50 000 долларов). Что еще более важно, это повлияло на создание других подобных протезов, сделав бионическую руку — как ее представляли себе военные — святым Граалем в протезировании. Сегодня бионическая рука с несколькими захватами является гегемоном, символом целостности киборга.
И все же некоторые разработчики протезов придерживаются другого видения. TRS, базирующаяся в Боулдере, штат Колорадо, является одним из немногих производителей протезы для конкретных видов деятельности, которые часто более долговечны и более доступны с финансовой точки зрения, чем роботизированные протезы. Эти пластмассовые и силиконовые насадки, в том числе мягкое устройство в форме гриба для отжиманий, храповой зажим для подъема тяжестей и вогнутый плавник для плавания, помогли мне ощутить наибольшую функциональность, которую я когда-либо получал от протеза руки. .
Такие низкотехнологичные протезы для активности и протезы с питанием от тела работают на удивление хорошо, а стоимость бионических рук составляет ничтожную долю. Они не выглядят и не действуют как человеческие руки, и от этого они функционируют лучше. Согласно Швейцеру, протезы с приводом от тела
инженеры регулярно называют его «мистическим» или насмешливо называют «капитаном Крюком». Будущие бионические плечи и локти могут иметь огромное значение в жизни людей, у которых отсутствует конечность до плеча, если предположить, что эти устройства можно будет сделать надежными и доступными. Но для Швейцера и большого процента пользователей, неудовлетворенных своими миоэлектрическими протезами, индустрия протезов еще не предложила ничего принципиально лучшего или более дешевого, чем протезы с питанием от тела.
Прорывы, которых мы хотим
Бионические руки стремятся сделать людей с ограниченными возможностями «цельными», чтобы мы участвовали в мире, который в культурном отношении двурукий. Но гораздо важнее, чтобы мы жили так, как хотим, с доступом к необходимым нам инструментам, чем чтобы мы выглядели как все. В то время как многие люди с разными конечностями использовали бионические руки для взаимодействия с миром и самовыражения, многовековые усилия по совершенствованию бионической руки редко сосредотачиваются на нашем жизненном опыте и том, что мы хотим делать в своей жизни.
Нам обещали прорыв в технологии протезирования на протяжении большей части 100 лет. Мне вспоминается научный ажиотаж вокруг выращенного в лаборатории мяса, который кажется одновременно взрывным сдвигом и признаком интеллектуальной капитуляции, когда политические и культурные изменения игнорируются в пользу технологического исправления. С персонажами в мире протезирования — врачами, страховыми компаниями, инженерами, протезистами и военными — играющими одни и те же роли на протяжении десятилетий, почти невозможно создать что-то действительно революционное.
Между тем, эта метафорическая гонка на Луну — это миссия, которая забыла о своей первоначальной цели: помочь людям с ограниченными возможностями приобретать и использовать инструменты, которые они хотят. Есть недорогие, доступные, низкотехнологичные протезы, которые доступны прямо сейчас и требуют инвестиций в инновации для дальнейшего снижения затрат и улучшения функциональности. И, по крайней мере, в Соединенных Штатах существует сломанная система страхования, которую необходимо починить. Освобождение себя от гонки бионических ручных вооружений может открыть возможности более функциональных конструкций, которые будут более полезными и доступными, и могут помочь нам вернуть наши устремления в области протезирования на землю.
Эта статья опубликована в печатном выпуске за октябрь 2022 г.
Различия между механической коробкой передач и автоматической коробкой передач
Если вы разговаривали с любителем вождения в прошлом, он, вероятно, восхваляет механические коробки передач. Секундочку, а в чем разница между механической коробкой передач и автоматической коробкой передач? Позвольте мне прояснить ситуацию для вас.
Автоматические коробки передач заменяют человеческий фактор при переключении передач некоторыми компьютерами. Впоследствии ощущения от вождения приглушаются, стоимость возрастает, а контроль частично теряется. В автомобиле с механической коробкой передач водитель должен выбирать передачи и управлять связью между двигателем и колесами.
В этом руководстве я объясню различия между автоматической и механической коробкой передач, предложу, какая из них подходит именно вам, и выделю их прямое сравнение. Спойлер: это не имеет ничего общего с маленькими роботами под капотом вашего автомобиля.
Как работает коробка передач?
Обе формы трансмиссии предназначены для достижения одной и той же цели: они хотят преобразовать мощность вашего двигателя и направить ее на ваши колеса.
То, как они это делают, немного отличается.
Когда вы смотрите на мощность двигателя, слишком дорого и сложно настроить, сколько энергии может быть произведено. В результате используется несколько передач.
Меньшие шестерни хорошо обеспечивают быстрое ускорение, но не могут обеспечить высокую максимальную скорость. Большие передачи имеют гораздо более высокие максимальные скорости, но для ускорения автомобиля требуется больше времени.
Используя эту простую идею, трансмиссия упорядочивает несколько передач, которые последовательно увеличиваются. Они удерживаются в месте, называемом коробкой передач.
По мере того, как ваш автомобиль разгоняется до более высокой скорости, ему требуется более крупная и мощная передача, которая поможет ему разогнаться до еще более высокой скорости.
Внутри автоматической коробки передачВ HowStuffWorks есть отличное изображение, помогающее описать процесс. Желтая ручка вверху слева — это ручка ручного переключения передач в вашем автомобиле. Он назначен на ряд различных шестерен с фиолетовыми промежуточными шестернями, перекрывающими зазор.
Если одна из промежуточных шестерен упрется, например, в синюю шестерню с маркировкой 2, автомобиль переключится на вторую передачу. Если вы посмотрите на красные шестеренки внизу, то заметите, что они увеличиваются от 1 до 5. Это восходит к тому, что я упоминал ранее о размере шестерни.
Как только фиолетовая шестеренка прижимается к синей, она входит в зацепление с синей шестерней, которая вращает красную шестеренку. Это управляет тем, как двигатель передается от двигателя (зеленый вал и шестерня) к дифференциалу.
Как работает механическая коробка передач
В механической коробке передач все зависит от действий водителя. Это почти как если бы машина раскладывала все передачи перед вами и просила вас выбрать, какую из них вы хотите выбрать в любой момент времени.
Научиться водить машину с механической коробкой передач проще, чем вы думаете. Это то же самое, что и автомобиль с автоматической коробкой передач, только с педалью сцепления и рычагом переключения передач.
Лично я думаю, что механические коробки передач теоретически легче понять, чем автоматические, так как вы физически двигаете части и видите немедленную реакцию.
6-ступенчатая механическая коробка передач Сцепление используется для включения и выключения двигателя из коробки передач. Когда он включен, зеленый вал приводит в движение зеленую шестерню, которая связана с остальной частью узла. Когда он отключен, это не так. Двигатель будет просто вращаться без подачи мощности, как хомяк, бегущий в своем колесе.
Водитель выжимает сцепление, выбирает соответствующую передачу правой рукой, маневрируя ручкой переключения передач, затем отпускает сцепление. Теперь автомобиль находится на передаче, и двигатель передает свою мощность на колеса.
По мере того, как автомобиль набирает обороты и едет быстрее, водителю необходимо повторить этот процесс, но выбрать более высокую передачу. Водитель постоянно танцует, слушая двигатель, проверяя тахометр и регулируя передачу.
Как работает автоматическая коробка передач
В автоматических коробках передач используются планетарные передачи, а не ряд шестерен. Они собраны вокруг центральной шестерни и зацепляются в различных комбинациях. Между ними находятся небольшие фрикционные муфты, которые зацепляют различные группы шестерен.
В результате у вас есть ряд передаточных чисел, которые могут быть достигнуты без места, необходимого для обеспечения физических передач этих размеров.
Есть датчики, определяющие, какую передачу следует использовать, а жидкость внутри трансмиссии творит чудеса.
Как водитель, все, о чем вам нужно заботиться, это бросить его в Драйв и нажать на газ или тормоз, когда вы хотите.
Типы автоматических трансмиссий
Существует несколько различных типов автоматических трансмиссий. Стандартная автоматическая коробка передач та, что я описал ранее.
Бесступенчатая трансмиссия (CVT)
Бесступенчатые трансмиссии существуют уже некоторое время, но, похоже, у них просто нет души. Я не драматизирую, это просто общее мнение.
Вы знаете, когда вы ведете машину и слышите, как двигатель заводится, увеличивает обороты, затем переключает и перезапускает процесс? Вариаторы так не делают.
Toyota Prius имеет трансмиссию CVT В ней вместо шестерен используются шкивы. Он может поддерживать постоянные обороты при ускорении, и это просто неправильно. На самом деле, это более эффективно с точки зрения механики, поскольку шкивы могут иметь массу различных передаточных чисел.
Автомобили уже давно используют вариаторы, но они не привлекают того внимания, которое привлекает стандартная автоматическая коробка передач. Обычно они изнашиваются чаще и требуют больше денег на ремонт.
Коробка передач с двойным сцеплением
Для более плавного переключения в коробке передач с двойным сцеплением используются два сцепления, которые чередуются при переключении передачи. Это не только делает езду более плавной, но и ускоряет процесс переключения передач.
Audi R8 с коробкой передач с двойным сцеплениемНапример, первое сцепление может включать передачи 1, 3, 5 и 7, а второе сцепление включает передачи 2, 4, 6 и 8.
Автоматизированная механическая коробка передач
Что происходит, когда мама с автоматической коробкой передач и папа с механической коробкой передач действительно любят друг друга? Вы получаете АМТ.
Porsche – автоматическая коробка передач Это гибрид двух систем. Он механически настроен так же, как и ручной, но сцепление и рычаг переключения передач управляются гидравлически без вашего участия. Это более дешевый вариант, чем автомат.
Вы также можете вручную переключать эту передачу, перемещая ручку переключения передач вверх или вниз.
Механическая и автоматическая трансмиссия
Позвольте мне на секунду объяснить разницу между механической и автоматической коробкой передач. Вы уже знаете, что такое механические различия, но вот различные черты в результате этих различий.
Легкость вождения
При наличии руководства вождение становится еще сложнее. Прямо сейчас я чувствую, как каждый водитель с переключением передач закатывает глаза, но вы должны признать, что это правда (давайте, ребята, я один из вас).
Дело простое в том, что есть дополнительная педаль, необходимость слушать двигатель и смотреть на тахометр, и ручка, которую нужно крутить во время поездки.
Со временем, конечно, привыкаешь, но все равно сложнее, чем на автомате, где можно просто давить на газ и тормозить как хочешь.
Насколько раздражающим является движение
Люди, водящие автомобили с механической коробкой передач, хотят рвать на себе волосы, когда они застревают в пробке. Постоянное переключение на пониженную передачу, а затем обратно на нейтраль определенно бесит.
Кроме того, автомобили с высокой или низкой мощностью, как правило, испытывают трудности на первой передаче с большим количеством рывков.
Между тем, в автомате вы просто подстраиваетесь под скорость автомобиля перед вами и включаете радио, чтобы успокоиться.
Опыт вождения
Это тема, которую мне трудно описать людям, которые не водят палку: опыт вождения.
Когда ты за рулем автомобиля с механической коробкой передач, ощущения совсем другие. Вы чувствуете, что вы и автомобиль находитесь в симбиозе во время вождения. Автомобиль не будет принимать решения без вашего участия и будет давать визуальные и звуковые подсказки о том, что делать.
Возможно, это немного высокомерно с моей стороны, но я твердо верю, что с механической коробкой передач вы получаете больше удовольствия от вождения.
Чем пользуются профессионалы?
Когда вы сравниваете два варианта, вы можете задаться вопросом, что выбирают профессионалы. Почти в каждом случае профессионалы используют механические коробки передач.
Посмотрите на NASCAR, WRC или Formula 1, и вам будет трудно найти автоматическую коробку передач. Для Nascar обычно используется механическая коробка передач Andrews A431.
Раллийный автомобиль Subaru ImprezaВ автомобилях WRC обычно используется секвентальная или H-образная коробка передач. Гоночные автомобили F1 обычно используют гибридную последовательную коробку передач, которая в основном полуавтоматическая с подрулевыми переключателями.
Почему? Это связано с преимуществами механической коробки передач. Больше контроля, лучшее ощущение и более изысканный опыт вождения. Кроме того, гонщикам NASCAR обычно не приходится иметь дело с медленным движением, если только они не свернули не туда.
Полный контроль
На скользких дорогах контроль решает все. Один из способов исправить это — использовать зимние шины. Другой способ — выбрать автомобиль, который обеспечивает больший контроль над двигателем.
В механической коробке передач вы всегда контролируете, на какой передаче вы находитесь. Хотите оставаться на низкой передаче, чтобы улучшить реакцию? Не проблема.
Переключить механическую коробку передач = веселоНужно переключиться на пониженную передачу, чтобы разогнаться и обогнать девушку рядом с вами на шоссе, чтобы произвести на нее впечатление? Огонь.
Автомобили с механической коробкой передач дают вам такой уровень контроля, которого вы не получите в автомобилях с автоматической коробкой передач. Даже в «ручном режиме» в автомобиле с автоматической коробкой бортовой компьютер принимает большинство важных решений за вас и подавляет вас.
Какой вариант продается больше?
Если бы эти трансмиссии были частью конкурса популярности в Америке, автомат выиграл бы с разницей в несколько миль. По данным CarMax, продажи механических коробок передач составили менее 5% от общего объема продаж автомобилей в 2020 году. Точное число — 2,5%.
Это возмутительно мало для тех, кто любит руководства.
Разнообразие автомобилей
Поскольку продажи руководств так низки, вы уже можете предсказать исход этого раздела. Разнообразие автомобилей на механике намного меньше, чем на автомате.
Есть лишь несколько автомобилей, которые предлагают версии с механической коробкой передач. В то же время подавляющее большинство автомобилей на американском рынке вообще не предлагают вариант с механической коробкой передач.
Уменьшение отвлечения внимания за рулем
Отвлеченное вождение — серьезная проблема во всем мире. Так заманчиво съесть свою еду, проверяя телефон и глуша радио. Пока не появятся беспилотные автомобили, эта привычка будет продолжать причинять вред и убивать людей.
Один из способов избавиться от отвлекающих факторов — использовать автопилот Tesla. Другой способ — взять механическую коробку передач.
Поскольку вы должны уделять все свое внимание машине, чтобы поработать на смене, вы не можете отвлекаться на другие дела. Кроме того, вы должны держать обе руки и ноги свободными, чтобы управлять автомобилем, если это механическая коробка передач.
Общая стоимость
Другим различием между этими двумя стилями передачи является стоимость. Поскольку МКПП механически проще, то и стоимость обычно ниже. Это относится к первоначальным затратам на его покупку, а также к затратам на обслуживание трансмиссии.
Если вы посмотрите на Kia Forte и сравните точно такой же уровень отделки салона с автоматической или механической коробкой передач, вы увидите разницу до 900 долларов в пользу механической коробки передач.
Что случилось с 10 и 2?
Поскольку при работе с ручным управлением приходится использовать обе руки, стиль вождения отличается. В большинстве случаев у вас не будет на руках 10 и 2. Вы будете рулить одной рукой и переключать передачи другой.
Заставьте ноги работать
То же самое относится и к вашей работе ног. Вместо того, чтобы отдыхать левой ногой во время вождения, вам придется все время держать ее возле педали сцепления.
Не ставьте ногу на педаль. Это включит сцепление и удержит его в «открытом» положении, готовом к включению следующей передачи. Более высокий износ означает, что компоненты выходят из строя раньше, чем должны, и цель состоит в том, чтобы продлить срок службы вашего автомобиля.
Какой вариант подходит именно вам?
Со всей этой информацией остался один вопрос: какой вариант подходит именно вам? Должны ли вы взять себе механическую или автоматическую коробку передач в свой автомобиль?
Если вам интересно мое честное мнение, подойдет любой вариант.
Если вы хотите получить более чистый опыт вождения, больше контроля и постоянное внимание к дороге, вам следует приобрести руководство.
Для водителя, который хочет непринужденной поездки по городу, регулярно оказывается в пробке и хочет чего-то простого, вам нужна автоматическая коробка передач. Вероятно, поэтому в Америке автоматы продаются на порядки лучше, чем механические.