Двигатель ВАЗ 21213 1.7 л., карбюратор Нива технические характеристики, масло, ремонт, особенности конструкции
В начале 90-х перед конструкторами АвтоВАЗа стояла задача создать новый более мощный двигатель для полноприводной Нивы. Впереди был кризис, но ВАЗ 21213, объёмом 1.7 литров, удалось успеть довести до ума. В 1994 году новый двигатель вышел в серийное производство. Выпуск данного силового агрегата продолжается в настоящее время.
ВАЗ 21213 устанавливался на такие автомобили: Лада 21213, Лада 2131, Лада 21216, Лада 2120, Лада 2121.
Содержание страницы
История создания ВАЗ 21213
АвтоВАЗ с 90-го года рассматривал два проекта. Первый, это создание мощного мотора для полноприводной Нивы. Второй проект, создание движка для заднеприводных Жигулей 07 модели. Тогда уже сказывался кризис. Финансирования на два проекта не хватало и их решили соединить. Созданный мотор идеально подходил для установки на полноприводный автомобиль. С 94 года его использовали для Нивы разных модификаций, на ВАЗ 2107 новый движок не попал.
Технические данные ВАЗ 21213
ВАЗ 21213 — четырёхтактный, бензиновый двигатель, имеющий рядное расположение четырёх цилиндров. Расположение в моторном отсеке продольное. Блок цилиндров выполнен из высокопрочного чугуна.
- Система газораспределения ДВС — один вал, имеющий верхнее расположение и восемь клапанов, по два клапана на один цилиндр.
- Система питания 213 модели — карбюратор типа Солекс.
- Ход поршня 21213 составляет 80 мм., цилиндр данного ДВС имеет диаметр 82 мм.
- Точный объём цилиндров — 1690 куб., сантиметров.
- Мощность ДВС 21213 при 5200 оборотов мин., 81 л., сила.
- Крутящий момент силового агрегата при 3000 оборотов мин., 125 Нм.
- Используемое горючее — АИ 92.
- Вес движка 213 модели 117 кг.
Расход топлива
Расход горючего при движении по трассе 8.3 литра на 100 км., пробега, при езде по городу 11.5 литра., общий расход составляет 10. 5 литра на 100 км., пробега.
5 литра на 100 км., пробега.
Масло
Допустимый расход моторной смазки 0.7 литров на 1000 км., пробега.
Виды используемого масла 15W40, 5W40, 10W40, 5W30. Объём масла в картере мотора 3.75 литра. При смене моторной смазки нужно брать 3.5 литра.
Ресурс силового агрегата Нива заявленный изготовителем — 80000 километров. Реальный пробег при правильном обслуживании составляет около 150000 километров.
Особенности конструкции ВАЗ 21123
Для уменьшения стоимости проекта, было принято использовать детали и узлы используемые на других моторах, которые на момент 1994 года находились в серийном выпуске.
Так блок цилиндров был взят от 03 модели Жигулей. Высота 03 блока 214,58 миллиметров. Расстояние между центрами цилиндров 95 миллиметров. Цилиндры имеют пять классов, обозначающиеся латинскими символами. Соответствующая маркировка находиться внизу каждого цилиндра.
Для нового мотора разработали новую поршневую группу. Поршень 213 модели имеет уникальную конструкцию. На дне находится овальная лунка, специфической формы. Размер диаметра поршней, имеет пять классов. Отверстие для поршневого пальца имеет диаметр 22 мм. Длинна пальца 67 мм. Конструкция установки пальца, плавающая. Палец свободно перемещается в головке шатуна и бобышках поршня. От осевого смещения пальца, предохраняют стопорные кольца. Маркировка поршня по диаметру отверстия и диаметру поршня, наноситься на дно поршня. Поршень имеет вес 0.347 кг.
На дне находится овальная лунка, специфической формы. Размер диаметра поршней, имеет пять классов. Отверстие для поршневого пальца имеет диаметр 22 мм. Длинна пальца 67 мм. Конструкция установки пальца, плавающая. Палец свободно перемещается в головке шатуна и бобышках поршня. От осевого смещения пальца, предохраняют стопорные кольца. Маркировка поршня по диаметру отверстия и диаметру поршня, наноситься на дно поршня. Поршень имеет вес 0.347 кг.
Шатун 213 модели новой конструкции. Он имеет длину 136 мм. Отверстие для шатунной шейки равно 47.8 мм. Диаметр отверстия для пальца поршневого 22 мм. Для крышки шатуна, сконструированные новые, одноразовые болты. Повторное использование болтов запрещено.
За основу коленчатого вала, взят коленвала от ВАЗ 2103, кривошипный механизм имеет радиус 40 мм. Для лучшей динамики и предотвращения вибрации, коленвал оборудован дополнительными противовесами. Для улучшенной смазки, в шатунных шейках просверлены масляные магистрали, а размер их диаметров увеличили на 0. 02 миллиметра.
02 миллиметра.
Головка БЦ взята от 011 модели Жигулей. Камеры сгорания претерпели изменения, их увеличили до 30 куб., см., каждую.
Привод ГРМ цепной, выполнен двухрядной, роликовой цепью, взятой от 03 модели.
Для нового мотора спроектировали новый распредвал 21213-1006010. На нём изменили форму кулачков, это нужно было сделать, чтобы увеличить ход впускного клапана. Клапанный механизм и клапаны позаимствованы у ВАЗ 2101.
На ВАЗ 21213 используется система зажигания бесконтактная с коммутатором, катушкой и распределителем зажигания.
Усовершенствованная система смазки, имеет наличие пробок, для накопления и последующего удаления грязи.
Схема системы охлаждения
Характерные неисправности ВАЗ 21213
В целом двигатель хороший, но как любая техника имеет слабые места:
- для данного силового агрегата характерен повышенный расход моторной смазки. Прежде всего, эта проблема связана с использованием дешёвого, моторного масла.
 Это приводит к нагару на стенках цилиндров, клапанах. В результате залегают маслосъёмные кольца падает компрессия и увеличивается расход моторной смазки. Иногда расход моторной смазки составляет более 1 литра на 1000 км., пробега.
Это приводит к нагару на стенках цилиндров, клапанах. В результате залегают маслосъёмные кольца падает компрессия и увеличивается расход моторной смазки. Иногда расход моторной смазки составляет более 1 литра на 1000 км., пробега. - двигатель на Ниве часто троит. Это одна из негативных особенностей данного силового агрегата. Причина может быть в прогаре клапана, пробитой прокладки ГБЦ, либо в неотрегулированном карбюраторе.
- перегрев ДВС случается по причине возникновения воздушной пробки в системе охлаждения, неисправности термостат, либо загрязнённом радиаторе охлаждения. Последствия перегрева могут привести к разгерметизации ГБЦ. Поэтому температуру нужно постоянно контролировать.
- стуки в моторе присущи всем автомобилям ВАЗ. Прежде всего может стучать натяжитель или успокоитель цепи, привода ГРМ. Может стучать подшипник помпы или клапана по причине повышенных тепловых зазоров.
- гораздо печальнее, если стучат детали ШПГ, это верный признак скорого капитального ремонта.

Плюсы и минусы ДВС 21213
Двигатель ВАЗ 21213 имеет ряд преимуществ, по сравнению с более ранними моделями ДВС.
Несомненным плюсом является использование без проблемного карбюратора Солекс. Он редко капризничает, а расход горючего сравним с инжектором.
Данный двигатель имеет улучшенные характеристики не только мощности и крутящего момента, но и приемистости и оборотистости.
Блок цилиндров ДВС гарантирует несколько ремонтов ШПГ.
К плюсам нужно отнести простоту конструкции, доступность и низкую стоимость запасных частей, а так же возможность выполнять ремонт своими силами.
Недостатков не так много, это повышенный расход рабочих жидкостей и плохое качество заводской сборки. Случаются и другие поломки, но происходят они не часто и репутацию двигателю не портят.
Какой двигатель можно установить на ниву шевроле
ДВИгатель 7А Тойота в Шевроле Нива
нива 3S АКПП,автомат(часть 1)
Нива Шевроле с двигателем от приоры выпуск 2
Aisin Японская МКПП установка в Ниву Шевроле
Инспектор ГАИ про законный свап
Обзор самой мощной серийной Chevrolet Niva FAM-1 с двигателем Opel Z18XE (122 HP)
Продам Двигатель на нива дизель 1. 9 полонез
9 полонез
Ваз 2115 3S-GE 200 л.с.
Лада 2121(НИВА) 4×4 с ДВИГАТЕЛЕМ 2jz gte 4WD ЧАСТЬ 1
Для улучшения показателей своего автомобиля можно установить двигатель на Ниву от иномарки без переделок. ВАЗ-2121 долгое время считался одним из лучших отечественных автомобилей и по мощности двигателя, и по ходовым показателям. Но сейчас эта модель автомобиля стала устаревшей, и многие автомобилисты стараются хоть как-то усовершенствовать ее. Какой двигатель стоит установить в качестве аналога бензиновому инжекторному движку 1,7 л?
Проблема замены
Дело в том, что для замены двигателя на ВАЗ-2121 можно подобрать почти десяток различных движков, но все они от иномарки. Но основная проблема в том, что придется выполнять и некоторые дополнительные работы при установке, например, устанавливать или менять крепления, добавлять новые детали. Из-за этого бюджетный вариант для замены найти не так просто. Выбор значительно сужается всего до нескольких вариантов. Чтобы двигатель подходил для установки, он должен соответствовать нескольким условиям:
Какой двигатель стоит рассмотреть в первую очередь?
Какое сцепление лучше поставить на Ниву, чтобы «установить и забыть»
В этой статье мы расскажем как правильно подобрать сцепление для любой модификации Нивы и где можно приобрести все необходимое с доставкой на дом.
Содержание:
- Какое бывает сцепление?
- Находим возможные неполадки и устраняем их
- Неполное включение или пробуксовка
- Недостаточное выключение
- Резкие рывки
- «Проваливается» педаль
- Выбираем, что установить на свой внедорожник Шевроле Нива, Нива 2121 и др. Модификации
- ВАЗ 2121 и другие модификации Нива
- Шевроле Нива
- Зачем устанавливать на ВАЗ 2121 сцепление от Шевроле Нива?
- Особенности обслуживания сцепления Нива и рекомендации, как продлить ему жизнь.
Какое бывает сцепление?
Как всегда, поиск оптимальных решений и ответов на вопросы начнём с терминологии. Что такое сцепление? Это промежуточное звено между силовым агрегатом и трансмиссией.
Что такое сцепление? Это промежуточное звено между силовым агрегатом и трансмиссией.
Принцип работы механизма, в общих чертах, заключается в том, что он кратковременно отсоединяет силовой агрегат от КПП. За счёт этого обеспечивается плавность состыковки элементов трансмиссии при переключении передач и гашение колебаний. Механическая КПП таким образом защищена от лишних перегрузок и, соответственно, повышенного износа.
Конструктивно фрикционная муфта, как ещё называют узел, передающий крутящий момент от маховика мотора, имеет целый набор различий. Она бывает электромагнитной, фрикционной и гидравлической.
А ещё «сухой», когда фрикционы работают без смазки и «мокрой», когда рабочие элементы сцепления функционируют в трансмиссионном масле. Различают постоянно и непостоянно замкнутые механизмы, а также одно, двух или многодисковые конструкции сцепления.
Наконец, этот элемент может быть с центральной пружиной или с несколькими пружинами, расположенными вкруг на нажимном диске. Сцепление может быть ещё либо двух, либо однопоточное.
Сцепление может быть ещё либо двух, либо однопоточное.
Глубже погружаться в этот океан технологических изысков не станем, поскольку нас интересует, прежде всего, вопрос какое сцепление на Ниву 2121 лучше. Также обратим внимание на этот агрегат авто применительно к внедорожнику Шевроле Нива.
Сцепление бывает: фрикционное (такой механизм передаёт крутящий момент за счет сил трения и является наиболее распространённым), электромагнитное (взаимодействие его элементов подчинено действию магнитного поля), гидравлическое (поток жидкости обеспечивает в такой фрикционной муфте работу её отдельных составляющих).
Находим возможные неполадки и устраняем их
Ниже перечислим основные признаки того, что пора озаботиться поиском решения задачки: сцепление Шеви Нива какое лучше. Наш перечень основных неисправностей данного агрегата, конечно же, не является закрытым, возникают и другие недоразумения, которые могут осложнить жизнь водителю, но они обусловлены частными случаями, а мы приводим наиболее распространённые проблемы:
Неполное включение или пробуксовка
Неполное включение или пробуксовка сцепления должны сразу насторожить водителя. Первый признак такой болезни – при движении на 3-4 передачах отмечается слабая прибавка в скорости при утоплении педали газа, что называется, «в пол». Оставите всё, как есть и спустя некоторое время из-за того, что один диск проскальзывает, и постоянно нагреваются от трения все элементы конструкции, ведомый диск легко поведёт, а нажимной и маховик могут потрескаться.
Первый признак такой болезни – при движении на 3-4 передачах отмечается слабая прибавка в скорости при утоплении педали газа, что называется, «в пол». Оставите всё, как есть и спустя некоторое время из-за того, что один диск проскальзывает, и постоянно нагреваются от трения все элементы конструкции, ведомый диск легко поведёт, а нажимной и маховик могут потрескаться.
«Вылечить» такой недостаток можно, отрегулировав ход педали. Может помочь осмотр и, как вариант, заменой ведомого диска:
Недостаточное выключение
Недостаточное выключение сцепления – второй малоприятный фактор. Даже на стоящей машине включение передачи сопровождается ощутимым хрустом? Возможно, педаль «ходит» больше, чем это нужно и данный узел не может полностью выполнить задачу, которая на него возложена, то есть, отсоединить двигатель от КПП. Чтобы не пришлось ремонтировать коробку, лучше обратить внимание на состояние выжимного и качество смазки в сцеплении. В двухдисковом сцеплении бывает, что диски замасливаются и попросту склеиваются. Кроме того, сцепление «ведёт» когда неисправен подшипник первичного вала.
Кроме того, сцепление «ведёт» когда неисправен подшипник первичного вала.
Соответственно может помочь свежая смазка или установка нового выжимного подшипника:
Резкие рывки
Резкие рывки, когда плавно отпускаете педаль, пожалуй, самая неприятная новость. Так о себе обычно дают знать разрушенные фрикционные накладки или покоробленный ведомый диск. Могут оказаться сломанными пружины или же развалился выжимной подшипник.
Улучшенная Нива
Инжектор, который установлен на Ниве, хоть и уменьшает расход топлива, все же не является самым экономным вариантом в городских условиях с пробками и прочими задержками. На трассе и во время длительных поездок за городом это ощущается не так сильно, поскольку машина работает без остановок и простоев. Из-за нерентабельности авто в городских условиях водители задумываются над хорошей и эффективной заменой старого движка инжекторного типа в своей машине. Лучшим вариантом станет дизельный двигатель на Ниву. Он имеет примерно те же характеристики по мощности, но расход топлива у него сравнительно меньше. Также дизель менее капризен в плане качества горючего. Какие же варианты из этой категории моторов стоят детального рассмотрения?
Также дизель менее капризен в плане качества горючего. Какие же варианты из этой категории моторов стоят детального рассмотрения?
Первым и самым достойным кандидатом является XUD 9 SD от Peugeot. Этот двигатель использовался для создания модифицированной версии Нивы — модели 212151 с французским движком. Его можно поставить на Ниву без особых проблем — крепления деталей и узла идентичны, мотор отлично подходит по размерам, кроме того, появляются некоторые преимущества от его монтажа.
По сути, это единственный вариант, подходящий по всем параметрам.
Двигатель на Ниву от иномарки без переделок
При покупке на Ниву двигателя от иномарок многие из новичков автолюбителей интересуются подойдет ли мотор от иномарки на отечественную автомашину без переделок. Несмотря на то, что Нива – это транспортное средство, которое пройдет любые дороги, благодаря клиренсу в 20 сантиметров. А объем силового агрегата в 1,7 литра не позволит тратить на бензин лишние денежные средства.
- Технические характеристики двигателей на Ниве
- Дизельный двигатель на Ниву Шевроле
- Варианты без доработок
- Варианты с доработкой
- Бензиновый двигатель на Ниву Шевроле
- С доработкой
- Без переделок
- Заключение
Технические характеристики двигателей на Ниве
Раз уж так разрекламировали отечественный автомобиль, давайте глянем на технические характеристики ДВС Нива 2121. Они все записаны в таблицу.
| Параметр | Значение |
| Мощность | 87 лошадок |
| Объем двигателя в литрах | 1,7 |
| Экокласс | Разные модели имеют разные классы. Например, 21214-41 – Евро 3. 21214-30 – Евро 4. |
| Крутящий момент | 129 Нм |
| Количество цилиндров | 4 |
| Количество клапанов | 8 |
| Макс.скорость | 142 кмч |
| Диаметр цилиндра в мм | 82 |
| Ход поршня в мм | 80 |
| Питание | Распределенное |
| БЦ | Чугун |
| ГБЦ | Сплав алюминия |
| Жизненный ресурс силового агрегата | 150 000 км |
| Горючее для эксплуатации | АИ 95 |
| Работа цилиндров | 1-3-4-2 |
| Тактность | 4 |
Внимание! Чем ближе двигатель Нивы выпущен к году, в котором живет, тем выше класс экологичности.

Расход топлива Нива такой же маленький, как и на всех малолитражках. Часто автовладельцы меняют бензиновый движок на дизельный для Нива Шевроле. Давайте глянем на преимущества, получаемые при установке этого движка и отрицательные стороны, с которыми приходится столкнуться владельцу.
Дизельный двигатель на Ниву Шевроле
В качестве замены используют дизельный движок для Нива. Такой мотор дает следующие преимущества для автомобиля:
- увеличиваются тяговые показатели на низких оборотах. Машина не буксует в грязи на сельских дорогах, на асфальте с мокрым снегом в осенний период. Хорошее прохождение по последнему параметру определяется также установкой качественных шипованных шин;
- уменьшается расход топлива Нива при поездках по сельским трассам и автобану;
- увеличивается жизненный ресурс двигателя.
Однако есть и минусы от установки дизельного двигателя на Нива. Происходит увеличение веса машины, а в городском режиме – это влияет на повышение расхода горючего. Вибрации от дизеля отдают в кузов. Дизельный движок от иномарки требует замены деталей иностранного производства. Поэтому увеличивается стоимость ремонта такого силового агрегата.
Вибрации от дизеля отдают в кузов. Дизельный движок от иномарки требует замены деталей иностранного производства. Поэтому увеличивается стоимость ремонта такого силового агрегата.
Какие двигатели на дизеле можно установить на Нива в списке:
- Пежо XUD 9SD;
- Пежо XUD 11SD;
- Фольцваген Венто.
Вместе с установкой вышеописанных моторов подходит коробка переключения передач от Фиата Полонеза. Потребуется немного поколдовать над переделкой, но потраченные усилия стоят того.
Что нужно будет сделать:
- Поставить подушки от ВАЗ 21215.
- Установить колокол и КПП от уже известного Фиата.
- Немного переделать поддон, маслозаборник, маховик и некоторые другие детали.
- Все изменения оформить через ГИБДД.
После подобного тюнинга вам не потребуется вкладываться в машину еще лет пять. Единственное, что нужно – это соблюдать регулярность технического осмотра и профилактической замены расходников: фильтров от воздушного до дизельного, сальников, если машина использовалась в тяжелых условиях, например, таких как жара и мороз ниже 20 градусов по Цельсию со знаком минус.
Давайте теперь посмотрим, какой из движков можно установить на Ниву, но не делая доработки и не переустанавливая систему «сердца» мотора полностью. Некоторые из перечисленных выше моторов все-таки имеют возможность встать без доработки места под движок. Опишем более подробно чем хороши эти двигатели.
Варианты без доработок
На Нива Шевроле встанет без доработок двигатель от Пежо XUD. Замена на этот силовой агрегат лучше установки родного нового движка. Во-первых, он долговечнее, чем тот, который стоит на Ниве изначально. Во-вторых, десяток различных движков по сравнению с Пежовским будут проигрывать в плане мощности и ремонтно-пригодности. Вам не придется выполнять замену многих деталей, чтобы мотор подошел к машине и взаимодействовал с колесами и коробкой передач.
Другим недостатком этого двигателя является дороговизна. Он устанавливается на автомобили Нива для экспорта. Поэтому детали на него имеют высокую цену.
Остальные дизельные моторы устанавливаются с доработкой.
Варианты с доработкой
Двигатели на Нива с переделкой уже идут от Тойота и Фольцвагена. О них я писал выше и как нужно менять, чтобы движок исправно работал тоже было расписано. Однако. Если вы не понимаете конструкцию силовых агрегатов, то процедуру замены лучше отдайте опытным механикам.
Поэтому в подробности пускаться не буду. Лучше напишу, о чем нужно знать при свапе движка на дизельный или бензиновый:
- силовой агрегат должен свободно размещаться под капот в моторном пространстве машины;
- максимально допустимое превышение по мощности – не больше 20 лошадок. Иначе другие детали авто не выдержат нагрузки;
- свап должен быть полезным.
А теперь поговорим о бензиновых силовых агрегатах.
Бензиновый двигатель на Ниву Шевроле
Для Нивы подходят не только импортные двигатели. Вполне подойдут и отечественного производства. Например, без доработки легко установится шестнадцати-клапанный силовой агрегат от компании ВАЗ. Он обладает меньшим расходом топлива, чем дизельные и большей мощностью.
Вполне подойдут и отечественного производства. Например, без доработки легко установится шестнадцати-клапанный силовой агрегат от компании ВАЗ. Он обладает меньшим расходом топлива, чем дизельные и большей мощностью.
Автовладельцы подобного мотора советуют менять распредвалы на тягу. Замены КПП не потребуется. Движки от иномарки требуют доработки. Следующий блок покажет, какие бензиновые силовые агрегаты подходят для свапа мотора Нивы.
С доработкой
Ниве подходит мотор от БМВ М42, М43 или от Тойота, но бензиновые. Потребуется прикупить некоторые детали для свапа, но смена двигателя на один из перечисленных даст такие результаты, которым вы удивитесь. Машина станет маневренней, будет лучше слушаться педали акселератора.
Расход топлива у данных силовых агрегатов невысокий. Поэтому тратится на них не придется, если только будете соблюдать правила технического осмотра и вовремя бывать в сервис-центрах.
Без переделок
Многие движки, подходящие без переделок для Нива Шевроле, не отличаются от того силового агрегата, которые выходили с завода вместе с транспортным средством. Поэтому опытные механики советуют устанавливать дополнительно турбину, если вы хотите увеличить мощность мотора. Выбор бензиновых значительно выше, чем дизельных.
Поэтому опытные механики советуют устанавливать дополнительно турбину, если вы хотите увеличить мощность мотора. Выбор бензиновых значительно выше, чем дизельных.
Бюджетный мотор, который успешно встанет на Ниву Шевроле, это Тойотовский 3S. Не нужно вносить серьезные изменения при установке данного силового агрегата. Вы можете установить коробку передач от этого автомобиля и раздатку. Тогда Нива станет мощнее.
Внимание! При свапе силового агрегата не забывайте о том, что вместе с двигателем меняется и управляемость машиной. Например, если ставится мотор более мощный, то управляемость несколько ухудшается.
Заключение
Автомобиль Нива собран по советским ГОСТам. Поэтому не следует забывать о том, что при установке иностранного двигателя на транспортное средство Нива от иномарки без переделок, то машина может просто развалиться, если у движка будет мощность превышать в несколько раз оптимальную мощь Шевроле.
После установки нового силового агрегата не забывайте бывать в сервис-центрах раз в год, чтобы провести профилактическое обслуживание. Так как мотор может выходить из строя по различным проблемам, если был неверно установлен. Старайтесь отдавать машину на свап движка только специалистам, чтобы не уничтожить транспортное средство самому неопытными руками.
Так как мотор может выходить из строя по различным проблемам, если был неверно установлен. Старайтесь отдавать машину на свап движка только специалистам, чтобы не уничтожить транспортное средство самому неопытными руками.
Варианты с доработкой
Поскольку не всегда можно поставить двигатель определенной иномарки, стоит рассмотреть варианты импортного производства, которые требуют небольшой доработки:
- Первым кандидатом станет опять-таки французский мотор от Peugeot серии XUD 11. Поскольку мощность этого агрегата выше, чем у предыдущей модели, потребуется внести некоторые правки в конструкцию Нивы — заменить коробку передач. Допустимый вариант — КПП от Fiat Polonez. Кроме этого, хорошим решением станет замена передних опор крепежей силовой установки, поддона и выхлопной системы. Также стоит заменить элементы привода на аналогичные детали от Шевроле Нивы.
Выбор двигателя
Это самый главный этап всей процедуры замены. Выбор следует осуществлять с учетом ваших собственных целей и технических возможностей автомобиля. На данную модель авто подойдут практически любые двигатели ВАЗ. Можете установить такую силовую установку от таких автомобилей:
На данную модель авто подойдут практически любые двигатели ВАЗ. Можете установить такую силовую установку от таких автомобилей:
Нередко автовладельцы останавливают свой выбор на ВАЗ-2112. Можете перекинуть движок и всю начинку с автомобилей ВАЗ-21045 или ВАЗ-21055. В результате у вас получится ВАЗ-2106 дизель. Главное преимущество установки таких вазовских агрегатов заключается в том, что они точно подойдут. Кроме того, в таком случае вам не придется тратить много денег и времени для прохождения процедуры перерегистрации.
Неплохой вариант – установить мотор от Приоры. Монтаж такого 16-клапанного агрегата обеспечит вашему авто 100 л. с. При этом стоит учитывать, что данная процедура по замене мотора непростая. Придется воспользоваться болгаркой для распиливания моторного щита, переваривать поддон. Потребуется переустановить подшипник коленвала на восьмерочный. Также нужно будет доработать маховик, систему выпуска и охлаждения, привод акселератора. Если вы готовы потратить достаточно много времени, сил и денег, то и такой способ увеличения мощности двигателя подойдет.
Если по каким-то причинам вы не рассматриваете варианты установок от ВАЗ, обратите внимание на Fiat 124. Такой движок является одним из немногих, идеально подходящих для ВАЗ-2106. При этом работы по его установке и затраченные усилия и время будут минимальными. Также достаточно мощными являются двигатели: Lancia Thema (834), Alfa Romeo (06476) и Fiat Croma (154). Вы можете рассматривать варианты таких моторов, поскольку они хорошо совместимы с автомобилем ВАЗ, обладают достаточно большим эксплуатационным сроком и хорошими техническими характеристиками.
Если хотите сделать из своего автомобиля BMW, ставьте один из этих двигателей: 326, 536 или 746. Такие силовые установки отличаются высокой мощностью. Поэтому вам в любом случае при их выборе придется усиливать подвеску, тормозную систему и т. д. Иначе езда на машине станет для вас и для пассажиров опасной.
Если вы планируете устанавливать японский двигатель для дрифта, приготовьтесь к тому, что ваши расходы будут достаточно большими.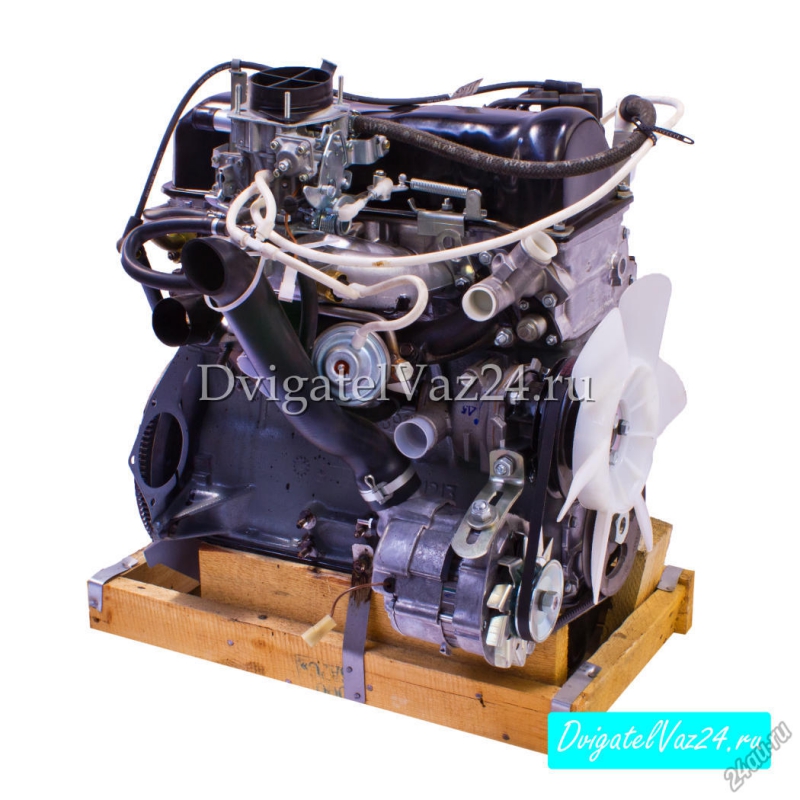 Потребуется немалое количество доработок, поскольку дрифт (профессиональный) на обычном автомобиле просто невозможен. Любая машина, которая подготавливается для этих занятий, проходит огромное количество изменений. ВАЗ-2106 не исключение.
Потребуется немалое количество доработок, поскольку дрифт (профессиональный) на обычном автомобиле просто невозможен. Любая машина, которая подготавливается для этих занятий, проходит огромное количество изменений. ВАЗ-2106 не исключение.
Серийная Нива с дизельным двигателем
Идею установки дизельного двигателя на модель Нива 2121 с самого начала пытались реализовать инженеры на заводе. Для Нивы предполагалось использовать отечественную версию 1.5-литрового турбодизельного мотора. С таким агрегатом опытные образцы не смогли эффективно справляться с ездой по бездорожью по причине недостаточной мощности. Следующим шагом стала установка аналогичного дизеля на 3-х и 5-и дверную версию Нивы, но уже с увеличенным рабочим объемом до 1.9 литра. Данные попытки успехом не увенчались, дизельная Нива с указанными ДВС не попала в серию.
Какой двигатель можно установить на ниву шевроле
ДВИгатель 7А Тойота в Шевроле Нива
нива 3S АКПП,автомат(часть 1)
Нива Шевроле с двигателем от приоры выпуск 2
Aisin Японская МКПП установка в Ниву Шевроле
Инспектор ГАИ про законный свап
Обзор самой мощной серийной Chevrolet Niva FAM-1 с двигателем Opel Z18XE (122 HP)
Продам Двигатель на нива дизель 1. 9 полонез
9 полонез
Ваз 2115 3S-GE 200 л.с.
Лада 2121(НИВА) 4×4 с ДВИГАТЕЛЕМ 2jz gte 4WD ЧАСТЬ 1
Для улучшения показателей своего автомобиля можно установить двигатель на Ниву от иномарки без переделок. ВАЗ-2121 долгое время считался одним из лучших отечественных автомобилей и по мощности двигателя, и по ходовым показателям. Но сейчас эта модель автомобиля стала устаревшей, и многие автомобилисты стараются хоть как-то усовершенствовать ее. Какой двигатель стоит установить в качестве аналога бензиновому инжекторному движку 1,7 л?
Niva-Chevrolet дизель
Дальнейшие попытки почти «официально» установить дизельный двигатель на Ниву (модель Нива-Шевроле) предприняли в городе Тольятти. Для этого тюнинг-ателье под названием «Тема-Плюс» получило разрешение от производителя GM-АвтоВАЗ. Главной доработкой модели Нива-Шевроле стала установка итальянского дизельного двигателя производства Fiat в паре с японской трансмиссией Aisin.
| Рабочий объем: | 1929 см 3 |
| Мощность: | 90 л. с с |
| Максимальный крутящий момент: | 195 Нм |
| Средний расход топлива на 100 км: | 7,5 л |
Технические характеристики стандартного мотора семерки
Обычный объем для движка ВАЗ – один и четыре кубических сантиметра. Однако этот объем на протяжении выпуска силовых агрегатов колебался от полтора до 1,8 литров. Мощность же стандартного двигателя начиналась от 71 лошадки.
Более подробные технические характеристики даны в таблице ниже.
| Параметр | Значение |
| Питание | Инжекторное или карбюраторное |
| Вид | Ряд |
| Поршни (штук) | 4 |
| БЦ | Чугунный |
| ГБЦ | Сплав алюминия |
| Ход поршня | 80 мм |
| Диаметр цилиндра | 76 мм |
| Крутящий момент | 104 Нм |
| Степень сжатия | 8,5 |
| Количество масла | 3,7 л |
Объем в куб. см. см. | 1452 |
Этот движок для ВАЗ 2107 выпускался с 1972 года. И уже в наше время его производят на российских заводах.
При выборе иного двигателя для установки на ВАЗ 2107 нужно подходит внимательно к размерам силового агрегата. Размеры должны соответствовать старому движку, чтобы не пришлось чего-нибудь удалять или подрезать металл. Это лишние проблемы и финансовые затраты, если, конечно, вы не экспериментатор.
Двигатель НИВА 2,0 литра (110 л.с. инжектор 21214)
Выберите категорию:
Все
Двигатель
» Двигатель ВАЗ в сборе
» Блок цилиндров ВАЗ
» Головка блока цилиндров (ГБЦ)
»» Клапана облегченные, увеличенные
»» Толкатель клапана
»» Распредвалы
»»» Нуждин (Колобок)
»»»» Веста 21179 1,8л.

Результатов на странице:
5203550658095
Тюнинг двигателя Нивы 4х4
Главная часть любого автомобиля — это его двигатель. Силовой агрегат Нивы часто не оправдывает надежд владельца автомобиля из-за достаточно низкого КПД и большого расхода топлива. Поэтому логично возникает вопрос, как улучшить эти показатели. В идеале хотелось бы также увеличить мощность автомобиля, улучшить крутящий момент, увеличить динамику и скорость, повысить ходовые характеристики и сделать автомобиль более послушным. Всего этого можно добиться, выполнив тюнинг двигателя Нивы 4х4.
Силовой агрегат Нивы часто не оправдывает надежд владельца автомобиля из-за достаточно низкого КПД и большого расхода топлива. Поэтому логично возникает вопрос, как улучшить эти показатели. В идеале хотелось бы также увеличить мощность автомобиля, улучшить крутящий момент, увеличить динамику и скорость, повысить ходовые характеристики и сделать автомобиль более послушным. Всего этого можно добиться, выполнив тюнинг двигателя Нивы 4х4.
Содержание
- Варианты тюнинга
- Работы по улучшению геометрии
- Доработка газораспределительного механизма
- Работы с масляным насосом
- Усовершенствуем выхлопную систему
- Нива с турбиной
Варианты тюнинга
Во время доработки двигателя Нивы чаще всего производят установку нового коленвала, цилиндров и поршневой системы. В результате машина получает отличные скоростные характеристики и проходимость.
Тюнинг двигателя Нивы бывает двух видов. К первому относится чип-тюнинг, а ко второму — механическая доработка элемента. Чип тюнинг включает в себя программную модернизацию, и его проводят только на новых, инжекторных внедорожниках. Он включает в себя перепрошивку настроек блока управления. Выполняется специалистами достаточно быстро — в течение получаса, однако требует знаний программного обеспечения и дополнительного электронного оборудования.
Чип тюнинг включает в себя программную модернизацию, и его проводят только на новых, инжекторных внедорожниках. Он включает в себя перепрошивку настроек блока управления. Выполняется специалистами достаточно быстро — в течение получаса, однако требует знаний программного обеспечения и дополнительного электронного оборудования.
Механическая доработка возможна на любой Ниве, и это самый популярный вид тюнинга силовой установки автомобиля. С его помощью можно значительно улучшить технические характеристики транспорта, а основывается он на внесении некоторых изменений в системы автомобиля.
Работы по улучшению геометрии
Из-за низких показателей КПД двигателя и малой износостойкости, механический тюнинг двигателя Нивы 4х4 является почти обязательным. Такие работы называются работами по изменению геометрии силовой установки. Начать дорабатывать силовую установку стоит с модернизации карбюратора. Делаем следующее:
- Меняем жиклёры с показателем 1 кам на жиклёр с показателем 2 кам;
- Обновляем носик ускорительного насоса.

Если в карбюраторе имеется грязь или нагар, производим чистку вручную. Для этого нам понадобится тряпка, бензин и физическая сила. Если грязь сильно въелась, поможет аппарат высокого давления или другое устройство, предназначенное для мойки машины. Также можно использовать специальные «ванны» для удаления присохшей грязи с деталей. Таким способом можно значительно улучшить подачу топлива в газораспределительный механизм.
Если вы являетесь обладателем инжекторной Нивы, то самостоятельная доработка инжектора недопустима. Только профессионал, обладающий знаниями в программном обеспечении, сможет выполнить такой тюнинг двигателя Нивы.
Доработка газораспределительного механизма
После замены жиклёров и ускорительного насоса, можно переходить ко второму этапу тюнинга двигателя ВАЗ-2121. Он включает в себя доработку газораспределительного механизма (ГРМ), а именно — увеличение диаметра клапанов с их последующей герметизацией. Такой тюнинг двигателя Нивы 2121 увеличит мощность силовой установки практически на десять процентов.
Имеет смысл во время доработки двигателя Нивы заменить толкатель (на новый с диаметром не менее 1 мм). Работа проводится над увеличением колодцев толкателя каналов впускных и выпускных. Особенно хороший результат такой доработки будет для Нивы 4×4.
Последующие работы касаются замены форсунок и самого блока управления. Тюнинг двигателя ВАЗ-2121 будет неполным, если не произвести замену штатного коленвала на продвинутую модификацию, что значительно увеличит мощность силовой установки. Это связано с увеличением хода поршней. Поршневые кольца также рекомендуется заменить на новые. При замене коленвала следует произвести расточку, так как это даст дополнительную возможность сделать мотор более мощным. Однако будьте готовы к тому, что и расход топлива будет увеличен.
Такой тюнинговый ремонт способен:
- увеличить плавность хода;
- уменьшить износ деталей;
- увеличить мощность.
Работы с масляным насосом
Смазка, поступая через масляный насос, продлевает срок службы двигателя. Чтобы улучшить производительность масляного насоса при тюнинге двигателя нивы, необходимо взять ещё один насос и отрезать от него часть корпуса с плоскостью разъёма. Толщина этого «блина» должна быть около 11 см. С помощью фрезеровки срезаем лишнее и оставляем толщину 10 мм.
Далее делаем следующее, чтобы убрать фаски на краях зубьев:
- Спрессовываем, то есть снимаем, ведущие шестерни.
- Торцуем одну из шестерён на 0,75 мм с каждой стороны.
- Вторую шестерню обрезаем до 11,5 мм (после торцовки).
- Повторяем операцию с остальными шестернями (ведомыми).
Приступаем к работе над корпусом. Для этого делаем следующее:
- Освобождаем ось ведомой шестерни из корпуса.
- Из ведущего валика формируем более длинную ось.

- Вставляем полученную ось в корпус.
- Узкую шестерню напрессовываем на второй ведущий валик.
- Напрессовываем широкую шестерню.
- Широкую ведомую шестерню фиксируем в корпусе.
- Устанавливаем в корпус узкую шестерню.
Такая последовательность позволит избежать проворота шестерней относительно друг друга. Можно усовершенствовать и маслоприемник Ваза, обрезав его на сантиметр снизу. После этого подгоняем торцевой зазор и соединяем всю конструкцию болтами.
Усовершенствуем выхлопную систему
Так как выхлопная система способна увеличить мощность и КПД мотора, тюнинг двигателя ВАЗ-2121 включает в себя установку современных выпускных и впускных коллекторов.
С их помощью процесс подачи воздуха и вывод отработанных газов будет оптимизирован, и КПД силовой установки станет выше. Для увеличения мощности двигателя имеет смысл установка резонатора от глушителя. При нём отвод выхлопных газов улучшается, а работающий двигатель приобретает красивое басовое звучание.
К тюнингу двигателя ВАЗ (Нива) относится и перенос глушителя дальше к заднему мосту, когда демонтируется практически вся выхлопная система. При этом резонатор можно установить от любой машины, например, от Москвича.
Нива с турбиной
Самым распространённым способом добавить мощность двигателю считается установка турбины или компрессора, которые значительно увеличат объём воздуха, поступающего в силовую установку.
Установка турбины не является сложным тюнинговым решением, так как сама турбина имеет достаточно простое строение. На одном валу стоят крыльчатки нагнетателя и турбины, а выхлопные газы являются приводом. Таким образом, мы можем наблюдать самое эффективное использование энергии продуктов горения в автомобиле. Отсутствия взаимодействия между коленвалом и валом турбины также повышает КПД силовой установки.
В общем, двигатель Нивы можно и нужно доработать, и тогда ваш автомобиль станет мощнее и прослужит гораздо дольше. К чему и нужно стремиться!
Цончо Ганев, Възраждане: Социолозите винаги ни дават два пъти по-малко гласове.
 Цифрите са други ᐉ Новини от Fakti.bg — България
Цифрите са други ᐉ Новини от Fakti.bg — БългарияБългария »
Всички градове »
Цончо Ганев, «Възраждане»: Социолозите винаги ни дават два пъти по-малко гласове. Цифрите са други
Тема: Парламентарни избори Октомври 2022
14 Септември, 2022 10:34 1 24053
- цончо ганев-
- социолози-
- гласове-
- цифри
Снимка: NovaNews
Ани ЕфремоваАвтор във Fakti.bgБез възстановяване на икономическите ни отношения с Русия и дългосрочни договори няма да бъде решена кризата с газа. Имаме дългосрочен договор с «Газпром», можехме да имаме сигурност на доставките, ако не си във вражеския списък. Можем да очакваме, че РФ ще спре да доставя резервни части за АЕЦ. Това заяви за «Твоят ден» Цончо Ганев от «Възраждане».
«Умишлено сме сложени на четвърто място, борим се за доверието на българския народ и вярваме, че ще сме първа политическа сила. Социолозите винаги ни дават два пъти по-малко гласове. Цифрите са други. Разговори за коалиция няма да водим с никой. Всички партии са декларирали евроатлантическа ориентация, но ние казваме, че България трябва да предоговори условията на членството си в ЕС», увери той. И допълни, че Волен Сидеров е подкрепил Орешарски и това е красноречиво.
Социолозите винаги ни дават два пъти по-малко гласове. Цифрите са други. Разговори за коалиция няма да водим с никой. Всички партии са декларирали евроатлантическа ориентация, но ние казваме, че България трябва да предоговори условията на членството си в ЕС», увери той. И допълни, че Волен Сидеров е подкрепил Орешарски и това е красноречиво.
«Много от структурите на «Атака» са част от «Възраждане». Нямаме нищо общо с ДПС, а Сидеров ги подкрепи, за да управляват България», подчерта Ганев.
По думите му «Възраждане» е имала възможност да се включи в управлението, но партията има ясни и точни приоритети, от които няма да отстъпи. «Искаме отмяна на плана за въвеждане на еврото. От следващата година домакинствата трябва да излязат на либерализирания пазар. Планът за възстановяване няма да ни спаси, трябва да закрием 40% от ТЕЦ-овете си до 3 години, а до 13 години — всички», посочи той.
Според него овладяване на инфлацията, при рекордни нива на газ и ток, е невъзможно. Той коментира и войната в Украйна. «Путин защитава руснаците в Украйна», смята Ганев.
Той коментира и войната в Украйна. «Путин защитава руснаците в Украйна», смята Ганев.
България
Поставете оценка:
☆ ☆ ☆ ☆ ☆
3.7
Оценка 3.7 от 44 гласа.
Свързани новини
Новини по градове:
Новини Айтос, Новини Балчик, Новини Банкя, Новини Банско, Новини Благоевград, Новини Бургас, Новини Бяла, Новини Варна, Новини Велико Търново, Новини Велинград, Новини Видин, Новини Враца, Новини Габрово, Новини Добрич, Новини Каварна, Новини Казанлък, Новини Калофер, Новини Карлово, Новини Карнобат, Новини Каспичан, Новини Китен, Новини Кнежа, Новини Козлодуй, Новини Копривщица, Новини Котел, Новини Кресна, Новини Кърджали, Новини Кюстендил, Новини Летница, Новини Ловеч, Новини Лом, Новини Луковит, Новини Мездра, Новини Монтана, Новини Несебър, Новини Нова Загора, Новини Нови Пазар, Новини Обзор, Новини Оборище, Новини Омуртаг, Новини Павликени, Новини Пазарджик, Новини Перник, Новини Петрич, Новини Плевен, Новини Пловдив, Новини Поморие, Новини Правец, Новини Радомир, Новини Разград, Новини Разлог, Новини Русе, Новини Самоков, Новини Сандански, Новини Сапарева Баня, Новини Свети Влас, Новини Свиленград, Новини Свищов, Новини Своге, Новини Севлиево, Новини Силистра, Новини Симитли, Новини Сливен, Новини Смолян, Новини Созопол, Новини Сопот, Новини София, Новини Средец, Новини Стара Загора, Новини Стрелча, Новини Суворово, Новини Тетевен, Новини Троян, Новини Трън, Новини Трявна, Новини Тутракан, Новини Търговище, Новини Харманли, Новини Хасково, Новини Хисаря, Новини Царево, Новини Чепеларе, Новини Червен бряг, Новини Черноморец, Новини Чипровци, Новини Чирпан, Новини Шабла, Новини Шумен, Новини Ябланица, Новини Ямбол
Главная страница DVS — новые дизайны водительских прав и удостоверений личности
Отдел обслуживания водителей и транспортных средств Департамента общественной безопасности штата Миннесота начал выдачу водительских прав и удостоверений личности с измененным дизайном в августе 2018 года. Карты с измененным дизайном доступны во всех центрах обслуживания водительских прав. по всему штату и заменили предыдущий дизайн, который использовался с 2004 года. Новый дизайн применялся ко всем водительским правам и удостоверениям личности, выдаваемым в штате Миннесота.
Карты с измененным дизайном доступны во всех центрах обслуживания водительских прав. по всему штату и заменили предыдущий дизайн, который использовался с 2004 года. Новый дизайн применялся ко всем водительским правам и удостоверениям личности, выдаваемым в штате Миннесота.
Что вам нужно знать
Вам не нужно заменять текущие водительские права или удостоверение личности, за исключением случаев, когда срок действия карты истекает, или вам нужно изменить свой адрес или имя. Жители Миннесоты смогут использовать свою текущую лицензию и удостоверение личности до истечения срока действия карты.
Стоимость новых карт такая же, как и старых карт.
Новый дизайн используется для карт, совместимых с REAL ID. У жителей Миннесоты была возможность подать заявку на получение карт, совместимых с REAL ID, с октября 2018 года, но до 9 октября 2018 года.0012 3 мая 2023 г., , чтобы получить его, если они захотят это сделать.
 Жители Миннесоты смогут использовать свои стандартные лицензии и удостоверения личности в федеральных целях, включая посадку на внутренние рейсы, до 3 мая 2023 года . Новый дизайн и новые функции сосновый лес и каноист, пользующийся природными ресурсами штата.
Жители Миннесоты смогут использовать свои стандартные лицензии и удостоверения личности в федеральных целях, включая посадку на внутренние рейсы, до 3 мая 2023 года . Новый дизайн и новые функции сосновый лес и каноист, пользующийся природными ресурсами штата.Новая ориентация для карт моложе 21 года
Вертикальные водительские права или удостоверение личности будут выданы любому лицу в возрасте до 21 года. Это дает краткую справку о том, что владелец карты является несовершеннолетним. Вертикальные лицензии и удостоверения личности в настоящее время используются в 46 других штатах.
Индикаторы младше 18 и младше 21 года отображаются под портретом.
МЛАДШЕ 18 ДО, с соответствующей датой, отображается черным текстом на желтой полосе.
ДО 21 ГОДА, с соответствующей датой, отображается белым текстом на красной полосе.
Новые функции безопасности
Новые карты имеют ряд функций безопасности, затрудняющих их подделку, в том числе:
«Призрачное изображение» в правом нижнем углу представляет собой повторяющееся изображение портрета владельца карты.

Разноцветный замысловатый фон.
Изображение судака, встроенное в картон, которое можно наблюдать, поднеся карту к источнику света.
Индикаторы REAL ID Министерства внутренней безопасности США
Каждая новая карта будет иметь один из следующих индикаторов в соответствии с федеральным законом REAL ID: Я БЫ.
НЕ ДЛЯ ФЕДЕРАЛЬНОЙ ИДЕНТИФИКАЦИИ указывает, что карта не соответствует требованиям.
TEMPORARY указывает, что владелец карты временно находится в США. 9 3 мая 2023 г. 3 мая 2023 года, чтобы получить его, если они захотят. Это означает, что жители Миннесоты смогут использовать свои стандартные лицензии и удостоверения личности в федеральных целях, включая посадку на внутренние рейсы, до 3 мая 2023 года .
Определенные цвета заголовка
В новом дизайне используются определенные цвета для текста, показывающего тип карты.
 Один и тот же цвет используется для коммерческих и стандартных водительских прав. Красный используется для взрослого держателя карты, а черный — для несовершеннолетнего.
Один и тот же цвет используется для коммерческих и стандартных водительских прав. Красный используется для взрослого держателя карты, а черный — для несовершеннолетнего. Дополнительные функции
Новые карты будут снабжены соответствующими индикаторами шрифта в соответствии с требованиями владельца карты.
- Для доноров органов будет отображаться символ сердца со словом «Донор».
- Слово SENIOR будет использоваться для держателей карт старше 65 лет, которые запрашивают лицензию и указывают, что они являются пожилыми людьми.
- Маркировка A будет означать Metro Mobility.
- Маркировка L указывает на ограниченную мобильность.
- Маркировка M указывает на необходимость медицинской тревоги.
- Маркировка P указывает на резервного или временного хранителя.
- А 9Маркировка 0012 T будет означать льготный тариф на проезд для пожилых людей.

Обратная сторона карты
На обратной стороне карты имеется одномерный штрих-код, содержащий номер водительского удостоверения владельца карты, и магнитная полоса с идентификационными данными. Внизу находится двумерный штрих-код, содержащий идентификационные данные.
Другие индикаторы, в том числе завещание о жизни/распоряжение о медицинском обслуживании, 100% T&P ветерана (полная и постоянная инвалидность) и Департамент природных ресурсов, обычные и пожизненные поля также будут напечатаны на обороте, если это применимо.
Варианты карты на выбор
Миннесота имеет несколько вариантов идентификации, из которых жители могут выбирать. Определение того, какой тип лицензии или удостоверения личности работает лучше всего, зависит от того, для чего человеку нужно использовать карту.
Стандартные водительские права или удостоверение личности
Улучшенные водительские права или удостоверение личности (EDL/EID)
Водительские права или ID-карта, соответствующие REAL ID
Часто задаваемые вопросы | Изменения в ДВС
1.
 Номер водительского удостоверения
Номер водительского удостоверения. Что меняется?
С 1 сентября 2022 года номер карты в водительских правах (DL) будет обязательным полем проверки для прав, выданных NSW, ACT, SA, TAS, NT и WA.
Хотя это поле не будет обязательным до 1 сентября 2022 года, мы все же рекомендуем отправлять номера карт раньше. В двух оставшихся штатах, VIC и QLD, это поле останется необязательным.
Номер карты — это уникальный идентификатор, который обновляется каждый раз при переоформлении водительского удостоверения. Включение номера карты в критерии соответствия гарантирует, что представляемый документ является последним выданным документом, и это минимизирует риск кражи личных данных с использованием украденных или утерянных водительских прав.
Я прочитал все ниже, и у меня все еще есть вопросы. Как еще я могу получить больше информации?
Пожалуйста, зарегистрируйтесь для участия в сеансе вопросов и ответов в августе 2022 года здесь.

Когда мне нужно быть готовым?
В таблице ниже представлена сводка текущего статуса в каждом штате и его значение для вас, и мы будем продолжать предоставлять обновления по мере их появления.
Когда будут доступны технические характеристики и данные испытаний?
Технические характеристики и данные испытаний уже доступны в Центре разработчиков Equifax. Вы можете запросить доступ здесь, если вам нужно. После входа в систему вы также можете загрузить документ Спецификации соответствия DVS, чтобы узнать длину, формат и тип данных номера карты каждого штата.
Где находится номер карты? Одинаково ли это для всех юрисдикций?
Расположение поля номера карты различается в зависимости от юрисдикции, а для водительских прав NT оно может отличаться в зависимости от даты выдачи. Образцы изображений водительских прав см. в Приложении B к документу Спецификации соответствия DVS — водительские права в Центре разработчиков Equifax.

Существуют ли карты ACT, WA или SA без номера карты, основанного на дате печати или выпуска?
На всех активных и неистекших картах для всех штатов будет напечатан номер карты, и этот номер карты можно проверить через DVS.
Отличается ли номер карты от номера лицензии?
Да. Номер лицензии — это существующее поле, которое уже является обязательным. Номер карты никогда не использовался для проверки и теперь будет использоваться в зависимости от графика каждого штата. В связи с этим изменением клиенты должны будут предоставить как номер лицензии, так и номер карты, а также другие обязательные сведения о водительских правах. Номер лицензии идентифицирует человека, а номер карты используется для подтверждения того, что это последняя карта.
Как изменение номера карты распространяется на утерянные и украденные водительские права?
Введение номера карты водительского удостоверения в качестве обязательного поля гарантирует, что водительские права со статусом утерянной или украденной карты не будут проверяться через DVS, и будет проверяться только последняя выпущенная карта.

Если мы не отправим номер карты после 1 сентября 2022 года для обязательных состояний, IDMatrix отклонит этот запрос на подтверждение или вы все равно отправите его в DVS?
IDMatrix отклонит запрос документа и вернет следующее сообщение об ошибке в разделе сведений о результатах службы; ‘В запросе отсутствует обязательное значение: driversLicence.cardNumber’ . Таким образом, такие запросы документов не будут отправлены в DVS. Более подробную информацию об ошибке можно найти в Руководстве по подключению API, которое можно найти в Центре разработчиков Equifax.
Будет ли номер карты включен в цифровые водительские права?
Цифровые водительские права штата Новый Южный Уэльс уже включают номер карты. SA находится в процессе добавления номера карты к цифровой лицензии SA, и мы еще не получили никаких сведений о сроках. QLD находится в процессе развертывания цифровой лицензии, и она будет включать номер карты.
Есть ли передовая практика пользовательского интерфейса, которую мы можем использовать для реализации изменений?
Equifax рекомендует пользовательский интерфейс с достаточной гибкостью, чтобы учесть различия в юрисдикциях.

Один из подходов состоит в том, чтобы иметь раскрывающееся меню для отдельных лиц, чтобы выбрать состояние выдачи и на основе выбора предоставить настраиваемый набор полей данных. Например, если выбрана Виктория, то поле номера карты может либо не отображаться, либо быть необязательным (на будущее).
Если выбрано NSW, то поле номера карты можно сделать обязательным, прежде чем клиент сможет продолжить работу с приложением.
Из-за юрисдикционных нюансов визуальная подсказка для клиентов также поможет обеспечить предоставление правильной информации. Общие ошибки включают в себя:
- Не фиксируется имя в том виде, в котором оно указано в документе .
- Указание номера карты в поле номера лицензии.
Какого ответа следует ожидать, если предоставленный номер карты не соответствует записи DVS?
Вы получите тот же ответ Fail, который вы получаете в настоящее время, если какое-либо из полей водительского удостоверения не совпадает.

Если физическое лицо запрашивает замену или продление, есть ли какое-то время, прежде чем новый номер карты можно будет проверить?
В большинстве случаев обновления выполняются почти в режиме реального времени, как только выпускается новая карта. Менеджер DVS работает со всеми юрисдикциями, чтобы определить бизнес-правила для любых крайних случаев, и эта информация может быть включена DVS в расширенные поля ответа.
2. Расширенное поле ответа DVS
Как мне будет полезна дополнительная информация в поле ответа?
Вы получите дополнительную информацию в поле ответа для каждого источника набора данных. Сегодня дополнительная информация доступна только для неудачной проверки DVS в результате ошибки проверки данных, которая возникает, когда предоставленные данные не соответствуют указанным требованиям поля.
Расширенное поле ответа поможет командам быстрее определить и устранить основную причину сбоев, поскольку оно будет включать причины неудачной проверки от издателя документа, где предоставленные данные не соответствуют доступной информации. Дополнительная информация будет возвращена как часть кодов результатов Службы проверки документов (DVS) для транзакций проверки во всех источниках данных DVS.
Дополнительная информация будет возвращена как часть кодов результатов Службы проверки документов (DVS) для транзакций проверки во всех источниках данных DVS.
Вы можете использовать эту дополнительную информацию для поддержки своей аналитики, например, для диагностики «неудачных» результатов транзакций и для оптимизации показателей прохождения проверки. Возвращенная дополнительная ответная информация предоставит более подробную информацию о неудачных транзакциях проверки документов. Это будет особенно полезно, если вы также реализуете изменение номера водительского удостоверения.Как я буду затронут?
Учитывая, что дополнительные данные будут отправлены в поля ответа набора данных, первое, что вам нужно будет сделать, это проверить, используете ли вы в настоящее время поле ответа, и определить любые последующие правила и решения в вашей системе. Это позволит вам оценить влияние поступающих дополнительных данных и даст представление о том, как вы можете захотеть использовать новые доступные вам данные.

Изменение расширенного ответа также вводит MAPS (решение для предотвращения вредоносных действий), которое будет отслеживать повторные попытки проверки от одного и того же кода агентства-источника пользователя (OAC) в отношении определенного документа, удостоверяющего личность. Как только количество попыток достигнет установленного порога для этого документа, OAC не сможет обрабатывать дальнейшие попытки этого конкретного документа. Если дальнейшие попытки обработать этот документ после этого момента, пользователь получит ответ «N» или «не соответствует» и будет уведомлен о том, что он заблокирован с помощью функции расширенных ответов. Эта блокировка будет временной на 20 минут и не помешает пользователям проверить другие документы, удостоверяющие личность, включая документы того же типа, они будут заблокированы только для этого отдельного документа.
Когда я начну получать дополнительную информацию из поля ответа?
4 июля 2022 г.
Как учитываются попытки?
Каждая транзакция, отправленная в DVS Hub, надежно регистрируется с использованием хеш-значения, состоящего из номера документа и OAC пользователя.
 Количество попыток подсчитывается с использованием этих журналов в течение скользящего 30-минутного окна, и, как только количество попыток достигает установленного порога для этого типа документа, пользователь будет заблокирован от повторной попытки этого конкретного документа, удостоверяющего личность.
Количество попыток подсчитывается с использованием этих журналов в течение скользящего 30-минутного окна, и, как только количество попыток достигает установленного порога для этого типа документа, пользователь будет заблокирован от повторной попытки этого конкретного документа, удостоверяющего личность.Каковы пороги для каждого документа?
Пороговые значения, которые применяются перед блокировкой пользователя для каждого типа документа, перечислены ниже.
Как долго документ будет заблокирован?
Блокировка будет продолжаться 20 минут и начнется с последней зарегистрированной попытки проверки. Это означает, что если пользователь инициировал блокировку, любые дальнейшие попытки в течение окна могут начать еще один 20-минутный период блокировки.
После блокировки я не смогу проверить другие документы?
Нет, пользователи смогут продолжить проверку других документов. Только конкретный документ, удостоверяющий личность, который вызвал блокировку, будет защищен от дальнейших попыток проверки.
 Например, если человек инициирует блокировку, пытаясь подтвердить свои водительские права, он по-прежнему сможет проверить другие документы, удостоверяющие личность (например, паспорт или карту Medicare), аналогичным образом блокировки не будут применяться к другим лицам, пытающимся подтвердить свои водительские права. через тот же ОАК.
Например, если человек инициирует блокировку, пытаясь подтвердить свои водительские права, он по-прежнему сможет проверить другие документы, удостоверяющие личность (например, паспорт или карту Medicare), аналогичным образом блокировки не будут применяться к другим лицам, пытающимся подтвердить свои водительские права. через тот же ОАК.Какой ответ я увижу, если меня заблокируют?
DVS вернет ответ «N» или «не соответствует», когда пороговое значение будет достигнуто и пользователь будет заблокирован. DVS также вернет причину сбоя «Документ временно заблокирован».
Меня заблокировали, что делать?
Пользователь может повторить попытку проверки документа после 20-минутного периода блокировки, однако любая попытка, предпринятая в течение этого периода, может перезапустить окно блокировки с последней попытки. Если у вас есть какие-либо вопросы или сомнения, напишите менеджеру DVS по адресу [email protected].
3. Изменения в списках избирателей Содружества
Список избирателей Содружества будет доступен через Службу проверки документов (DVS) с июня 2022 года.
 Существующий список избирателей, размещенный на Equifax, будет доступен до начала 2023 года. клиентов, имеющих доступ к этому источнику данных. Если вы пострадали, обратитесь к своему менеджеру по работе с клиентами Equifax.
Существующий список избирателей, размещенный на Equifax, будет доступен до начала 2023 года. клиентов, имеющих доступ к этому источнику данных. Если вы пострадали, обратитесь к своему менеджеру по работе с клиентами Equifax.Какую пользу мне принесет перенос списка избирателей в DVS?
Более быстрые обновления и данные в реальном времени! Перемещение списка избирателей Содружества в DVS будет означать, что обновления информации о списках избирателей Содружества будут доступны в режиме реального времени, а не ежеквартально. Equifax больше не будет получать ежеквартальные обновления непосредственно от AEC, в которых фиксируются изменения, внесенные в список избирателей Содружества за предыдущие 3 месяца. Вместо этого информация о списках избирателей Содружества будет сопоставляться с источником данных AEC через DVS в режиме реального времени.
Как я буду затронут?
Equifax рекомендует вам просмотреть конфигурацию вашего профиля, чтобы понять потенциальное влияние на ваш бизнес.
 Области для рассмотрения могут включать:
Области для рассмотрения могут включать:- Каково ваше правило проверки?
- Какие источники данных вы используете в настоящее время?
- Как источники данных, которые вы используете, влияют на ваше правило проверки?
Перемещение списка избирателей Содружества в DVS приведет к точному совпадению имени, даты рождения и некоторых компонентов адреса. Это может привести к снижению коэффициентов совпадения наборов данных.
IDMatrix в настоящее время использует «нечеткое» сопоставление для списка избирателей Содружества. В отличие от точного сопоставления, для которого требуется, чтобы предоставляемая информация точно соответствовала источнику данных, нечеткое сопоставление уравновешивает необходимость допускать естественные вариации данных в источниках проверки с необходимостью проверки личности человека с высокой степенью достоверности.
Когда будут доступны технические характеристики и данные испытаний?
Спецификации соответствия DVS для списка избирателей Содружества теперь доступны на портале DVS, и если у вас нет доступа к порталу, вы можете связаться с Equifax.

Изделия Newtek Tricaster
Изделия Newtek TricasterПРОДУКЦИЯ ТРИКАСТЕР МИНИ Усовершенствованный
ТРИКАСТЕР 2 Элита
ТРИКАСТР МИНИ 4K
ТРИКАСТЕР 410 Plus
ТРИКАСТЕР TC1
ПОВОРОТНАЯ КАМЕРА NEWTEK NDI
ПОВОРОТНАЯ КАМЕРА NEWTEK NDI 4K
3П1
3P2
TALKSHOW
SPARK PLUS
ПРИНАДЛЕЖНОСТИ ДЛЯ ТРИКАСТЕРА
PTZOPTICS 12X-SDI
ПТЗОПТИКА 12X-USB
ПТЗОПТИКА 20X-USB
ПОРТОПТИКА 20X-СДИ
ROLAND
ПРОВОДНАЯ ШЕСТЕРНЯ 110
ПРОВОДНАЯ ШЕСТЕРНЯ 210
ПРОВОДНАЯ ШЕСТЕРНЯ 220
ДОРОЖНЫЕ КЕЙСЫ
vMIX
ВИРТУАЛЬНЫЕ НАСТРОЙКИ
Б/У И B-СТОК
ТРИКАСТЕР XD 8000
ТРИКАСТЕР XD 860
TRICASTER XD 460
NEWTEK SPARK HDMI
NEWTEK SPARK СДИ
СПОРТИВНАЯ ПРОДУКЦИЯ FLYPACK
STREAMSTAR
СПЕЦИАЛЬНЫЕ АКЦИИДом
Сравнить модели Tricaster
Трикастер Трейд в МатрицеСвяжитесь с нами PH 1 800 379 7267
Телефон 1 814 371 5640
ФАКС 1 814 371 2033ЭЛЕКТРОННАЯ ПОЧТА ПРОДАЖИ@DVSDIRECT.
 COM
COMДЮБУА ОФИС
250 Commons Доктор ПМБ 333
Дюбуа, Пенсильвания 15801ДВС ПРЯМОЙ — одна из премьер цифровое видео ЖИВОЙ ВИДЕО ПОТОК ПРОИЗВОДСТВО И КОНСАЛТИНГ услуги специализируется на цифровом видео производственные системы, демонстрирующие цифровое видео Программное обеспечение для редактирования и монтаж цифрового видео Аппаратное обеспечение Мы являемся одним из старейших и наиболее уважаемые системные интеграторы цифрового видео эксперты в области потокового видео и веб-трансляций с более чем 30-летним опытом работы в поле.

НОВИНКА! NewTek 3Play® 3P2
Встроенная интеграция NDI®, инновационной сети NewTek Технология интерфейса устройства, 3Play 3P2 полностью оборудован для производства IP-спорта, при подключении к самый продуктивный рабочий процесс на основе IP в отрасли.НОВИНКА ТРИКАСТЕР 2 Элита ТРИКАСТЕР МИНИ 4K ТРИКАСТЕР TC1 НОВЫЙ 3PLAY 3P2 ТРИКАСТЕР 410 Плюс ТРИКАСТЕР МИНИ Усовершенствованный Дорожный чехол Решения для вашего Трикастер
ДОРОЖНЫЕ КЕЙСЫ
СПОРТИВНАЯ ПРОДУКЦИЯ FLYPACK
.  ..
... Положения и условия Copyright © 2012 DVSDIRECT.com. Разработано шаблонами веб-страниц CIFAR10-DVS: набор данных Event-Stream для классификации объектов
Введение
Нейроморфное зрение на основе нейроморфных камер (Delbruck, 2008; Lichtsteiner et al., 2008; Serrano-Gotarredona and Linares-Barranco, 2013; Yang et al., 2015), которые преобразуют визуальную информацию в представление адреса-события ( AER; Boahen, 2000) потоки событий привлекают все большее внимание. Для распознавания образов и классификации объектов высококачественные наборы данных обеспечивают сложные ориентиры для поддержки непрерывной разработки и сравнения сложных и надежных алгоритмов и методов (Sotiris et al.
 , 2006). В компьютерном зрении ряд хорошо зарекомендовавших себя наборов данных, например, CIFAR-10 (Крижевский, 2009 г.), MNIST (Lecun et al., 1998) и Caltech201 (Fei-Fei et al., 2007). Кроме того, они могут получать изображения на основе кадров или создавать наборы данных на основе кадров в Интернете или с помощью цифровых камер. Хотя многие высококачественные наборы данных способствовали развитию области компьютерного зрения (Tan et al., 2015), исследователям нейроморфного зрения доступно очень ограниченное количество наборов данных. В отличие от создания обычных наборов данных компьютерного зрения, очень сложно разработать набор данных нейроморфного зрения, собирая данные в Интернете. Таким образом, создание наборов данных для исследователей нейроморфного зрения является важной, но сложной задачей. Как правило, высококачественный набор данных классификации потоков событий должен создавать проблемы для современных алгоритмов, основанных на событиях. Это должно быть достаточно сложно, чтобы текущие алгоритмы не достигли почти идеальной точности даже перед лицом значительной алгоритмической оптимизации.
, 2006). В компьютерном зрении ряд хорошо зарекомендовавших себя наборов данных, например, CIFAR-10 (Крижевский, 2009 г.), MNIST (Lecun et al., 1998) и Caltech201 (Fei-Fei et al., 2007). Кроме того, они могут получать изображения на основе кадров или создавать наборы данных на основе кадров в Интернете или с помощью цифровых камер. Хотя многие высококачественные наборы данных способствовали развитию области компьютерного зрения (Tan et al., 2015), исследователям нейроморфного зрения доступно очень ограниченное количество наборов данных. В отличие от создания обычных наборов данных компьютерного зрения, очень сложно разработать набор данных нейроморфного зрения, собирая данные в Интернете. Таким образом, создание наборов данных для исследователей нейроморфного зрения является важной, но сложной задачей. Как правило, высококачественный набор данных классификации потоков событий должен создавать проблемы для современных алгоритмов, основанных на событиях. Это должно быть достаточно сложно, чтобы текущие алгоритмы не достигли почти идеальной точности даже перед лицом значительной алгоритмической оптимизации. Но задача не должна быть слишком сложной, чтобы можно было внести какие-либо существенные улучшения для достижения относительно хорошей точности.
Но задача не должна быть слишком сложной, чтобы можно было внести какие-либо существенные улучшения для достижения относительно хорошей точности.Преобразование существующего набора данных на основе кадров в версию потока событий экономит время, не пытаясь найти несколько объектов разных классов для записи и маркировки. Использование популярных наборов данных изображений упрощает сравнение двух сообществ. Недавно два популярных набора данных изображений были преобразованы в наборы данных потока событий. Одним из них является набор данных MNIST, который был преобразован в два набора данных нейроморфного зрения, то есть MNIST-DVS и N-MNIST (Orchard et al., 2015; Serrano-Gotarredona and Linares-Barranco, 2015). В наборе данных MNIST-DVS 10 000 цифр были выбраны из стандартного набора данных из 70 000 изображений и отображены на ЖК-мониторе в трех разных масштабах в течение примерно 2–3 с. При преобразовании набора данных N-MNIST все цифры MNIST были преобразованы в потоки событий с помощью асинхронного датчика изображения на основе времени (ATIS).
 Событий фонового шума немного, поскольку все цифры MNIST размещены на однородном фоне. Как известно, высокая точность была достигнута на двух нейроморфных версиях набора данных MNIST (Orchard et al., 2015; Zhao et al., 2015). Другой — набор данных Caltech201, который содержит 100 классов изображений, причем все они были преобразованы (Orchard et al., 2015). Естественные изображения Caltech201 сложнее, чем цифры MNIST. Будучи более сложным, 100 различных категорий набора данных затрудняют улучшение и оптимизацию текущих алгоритмов, управляемых событиями. Однако, несмотря на то, что версии событийного потока двух наборов данных изображений обеспечили хорошие ориентиры в нейроморфном зрении, нейроморфный набор данных средней сложности с меньшим количеством классов объектов, чем у N-Caltech201, и более сложными объектами, чем цифры, по-прежнему отсутствует. CIFAR-10 представляет собой более сложный набор данных изображений на основе кадров, чем MNIST, хотя в нем меньше категорий, чем в Caltech201.
Событий фонового шума немного, поскольку все цифры MNIST размещены на однородном фоне. Как известно, высокая точность была достигнута на двух нейроморфных версиях набора данных MNIST (Orchard et al., 2015; Zhao et al., 2015). Другой — набор данных Caltech201, который содержит 100 классов изображений, причем все они были преобразованы (Orchard et al., 2015). Естественные изображения Caltech201 сложнее, чем цифры MNIST. Будучи более сложным, 100 различных категорий набора данных затрудняют улучшение и оптимизацию текущих алгоритмов, управляемых событиями. Однако, несмотря на то, что версии событийного потока двух наборов данных изображений обеспечили хорошие ориентиры в нейроморфном зрении, нейроморфный набор данных средней сложности с меньшим количеством классов объектов, чем у N-Caltech201, и более сложными объектами, чем цифры, по-прежнему отсутствует. CIFAR-10 представляет собой более сложный набор данных изображений на основе кадров, чем MNIST, хотя в нем меньше категорий, чем в Caltech201. Текущая современная точность классификации для алгоритмов на основе кадров на CIFAR-10 составляет 96,53% (Springenberg et al., 2015). В этой статье CIFAR-10 преобразован в набор данных нейроморфного зрения среднего уровня в 10 классах.
Текущая современная точность классификации для алгоритмов на основе кадров на CIFAR-10 составляет 96,53% (Springenberg et al., 2015). В этой статье CIFAR-10 преобразован в набор данных нейроморфного зрения среднего уровня в 10 классах.Существует два способа, которые обычно используются при преобразовании нейроморфных данных. Одним из способов является преобразование изображений на основе кадров в потоки событий путем моделирования (Masquelier and Thorpe, 2007; O’Connor et al., 2013). Моделирование не полностью соответствует реалистичной записи событийной камерой. Если изображение захвачено с помощью покадровой камеры, то временная информация неизбежно теряется. Кроме того, шум в реальном мире не представлен в моделировании. Второй способ — генерировать потоки событий с помощью нейроморфной камеры (Orchard et al., 2015; Serrano-Gotarredona and Linares-Barranco, 2015). Гаррик Орчард (Orchard et al., 2015) использовал саккадное движение камеры, разработав поворотно-наклонную платформу с приводом для перемещения камеры ATIS перед ЖК-монитором.
 По сравнению с движением камеры движение изображения (Серрано-Готарредона и Линарес-Барранко, 2015) легче контролировать. Кроме того, движение изображения ближе к практическим приложениям, чем метод поворота и наклона. Например, нейроморфные камеры подходят для наблюдения за пешеходами или другими движущимися объектами.
По сравнению с движением камеры движение изображения (Серрано-Готарредона и Линарес-Барранко, 2015) легче контролировать. Кроме того, движение изображения ближе к практическим приложениям, чем метод поворота и наклона. Например, нейроморфные камеры подходят для наблюдения за пешеходами или другими движущимися объектами.В этой статье мы создали набор данных пар событий под названием «CIFAR10-DVS» путем преобразования популярного набора данных изображений на основе кадров «CIFAR-10» с помощью камеры DVS (Lichtsteiner et al., 2008). Камера имеет пространственное разрешение 128 × 128. В названии набора данных «CIFAR10-DVS» «DVS» представляет камеру DVS, как и MNIST-DVS. Набор данных CIFAR-10 состоит из 60 000 цветных изображений 32 × 32 в 10 классах, по 6 000 изображений в каждом классе. При преобразовании было выбрано 1000 изображений на класс, что соответствует MNIST-DVS. Преобразованные потоки событий изображений CIFAR-10 имеют более сложную пространственно-временную структуру, чем MNIST-DVS.
 Меньшее количество категорий делает созданный CIFAR10-DVS проще, чем N-Caltech201. Таким образом, CIFAR10-DVS представляет собой набор данных о потоке событий среднего уровня, обеспечивающий пространство для постоянного улучшения алгоритмов, управляемых событиями. Движение изображения используется для получения изменений интенсивности в поле зрения событийной камеры. Когда изменение интенсивности локального логарифма превышает предварительно определенный порог, генерируется событие. В отличие от метода движения камеры, движение изображения легче реализовать с помощью программирования на компьютере и ближе к практическим приложениям. В этой работе повторяющееся плавное движение изображения с обратной связью (RCLS) использовалось для создания богатых ориентированных градиентов интенсивности, захваченных нейроморфной камерой. Эта работа предоставляет большой набор данных потока событий и начальный эталон для сравнения, который может ускорить разработку алгоритмов, управляемых событиями, в распознавании объектов нейроморфного зрения.
Меньшее количество категорий делает созданный CIFAR10-DVS проще, чем N-Caltech201. Таким образом, CIFAR10-DVS представляет собой набор данных о потоке событий среднего уровня, обеспечивающий пространство для постоянного улучшения алгоритмов, управляемых событиями. Движение изображения используется для получения изменений интенсивности в поле зрения событийной камеры. Когда изменение интенсивности локального логарифма превышает предварительно определенный порог, генерируется событие. В отличие от метода движения камеры, движение изображения легче реализовать с помощью программирования на компьютере и ближе к практическим приложениям. В этой работе повторяющееся плавное движение изображения с обратной связью (RCLS) использовалось для создания богатых ориентированных градиентов интенсивности, захваченных нейроморфной камерой. Эта работа предоставляет большой набор данных потока событий и начальный эталон для сравнения, который может ускорить разработку алгоритмов, управляемых событиями, в распознавании объектов нейроморфного зрения.
Оставшаяся часть этого документа состоит из четырех частей. В разделе «Материалы и методы» представлена система регистрации, состоящая из аппаратного комплекса и программного комплекса. В разделе «Свойства данных» представлены статистические свойства набора данных CIFAR10-DVS. В разделе «Показатели производительности» точность распознавания существующих алгоритмов представлена до завершения с выводом в разделе «Заключение».
Материалы и методы
В этом разделе представлены принцип и методология преобразования набора данных потока событий. В нашем методе записи не требуются сложные аппаратные модули. В разделе Повторяющееся гладкое движение с замкнутым контуром (RCLS) представлено движение RCLS, которое является основой нашего подхода. Раздел Система записи знакомит с аппаратными и программными модулями системы записи. Предлагаемый набор данных доступен онлайн 1 .
Повторяющееся плавное движение с обратной связью (RCLS)
В каждой записи DVS кластер событий формирует форму объекта.
 Как правило, для определенного изображения большее количество событий, кроме событий окружающего шума, делает пространственно-временную форму объекта более четкой. Чтобы генерировать больше событий, камера событий должна фиксировать больше локальных изменений интенсивности. В данной работе движение изображения RCLS используется для преобразования ориентированных градиентов изображения в локальные относительные изменения интенсивности в поле зрения камеры DVS. Из-за времени отклика нейроморфного устройства плавное движение с соответствующей скоростью полезно для создания большего количества событий. На самом деле плавное движение также связано с человеческим зрением, потому что мы не можем очень хорошо ощущать прыгающие объекты из-за ограниченной скорости визуальной обработки (Торп и др., 19).96). Камера DVS специально разработана таким образом, что пиксель реагирует на временной контраст интенсивности и генерирует событие всякий раз, когда контраст превышает пороговое значение. Повторяющееся движение изображения по замкнутому контуру в течение непрерывного времени генерирует значительные локальные изменения интенсивности, и каждый пиксель камеры DVS непрерывно квантует локальные относительные изменения интенсивности для генерации событий.
Как правило, для определенного изображения большее количество событий, кроме событий окружающего шума, делает пространственно-временную форму объекта более четкой. Чтобы генерировать больше событий, камера событий должна фиксировать больше локальных изменений интенсивности. В данной работе движение изображения RCLS используется для преобразования ориентированных градиентов изображения в локальные относительные изменения интенсивности в поле зрения камеры DVS. Из-за времени отклика нейроморфного устройства плавное движение с соответствующей скоростью полезно для создания большего количества событий. На самом деле плавное движение также связано с человеческим зрением, потому что мы не можем очень хорошо ощущать прыгающие объекты из-за ограниченной скорости визуальной обработки (Торп и др., 19).96). Камера DVS специально разработана таким образом, что пиксель реагирует на временной контраст интенсивности и генерирует событие всякий раз, когда контраст превышает пороговое значение. Повторяющееся движение изображения по замкнутому контуру в течение непрерывного времени генерирует значительные локальные изменения интенсивности, и каждый пиксель камеры DVS непрерывно квантует локальные относительные изменения интенсивности для генерации событий. Частота событий или количество событий в течение временного интервала пропорциональна временному контрасту, который определяется как
Частота событий или количество событий в течение временного интервала пропорциональна временному контрасту, который определяется какTCON=d(ln(I(x,y))dt=1I(x,y)dI(x,y)dt (1)
, где I(x, y) снижает яркость на уровне (x, y) положение поля зрения нейроморфной камеры. Предположим, что поле зрения камеры DVS представляет собой двумерное поле интенсивности, а изображение на основе кадра расположено в поле интенсивности, как показано на рисунке 1А. Каждое значение пикселя обозначает интенсивность соответствующей позиции в поле интенсивности. Движение изображения преобразует градиенты интенсивности изображения в изменения интенсивности во времени в поле интенсивности. Каждый пиксель независимо и в течение непрерывного времени квантует относительные изменения интенсивности соответствующей точки в поле интенсивности для генерации событий. Изменения интенсивности, вызванные движением с обратной связью, показаны на рисунке 1B. Замкнутое движение состоит из четырех путей, имитирующих саккаду биологического зрения.
 Градиенты интенсивности двух направлений фиксируются нейроморфной камерой синхронно. Для каждой точки в поле интенсивности изменение интенсивности во времени представляется следующим образом:
Градиенты интенсивности двух направлений фиксируются нейроморфной камерой синхронно. Для каждой точки в поле интенсивности изменение интенсивности во времени представляется следующим образом:dI(x,y)dt=dI(x,y)dx⋅dxdt+dI(x,y)dy⋅dydt=Ix⋅Vx+Iy⋅Vy (2)
, где I x , I y представляют собой градиенты интенсивности изображения относительно пространственных координат x и y в двумерном поле интенсивности соответственно. V x и V y скорости движущегося изображения в x и и направления. Уравнение (2) описывает, как движение изображения приводит к изменению интенсивности поля интенсивности.
Рис. 1. (A) Движение изображения по осям x и y одновременно во времени в двумерном поле интенсивности. Движущееся изображение генерирует локальные изменения интенсивности как в направлении x, так и в направлении y одновременно.
 (B) Движение RCLS изображения. Четыре пути составляют замкнутое движение. Каждый путь проходит под углом 45°.
(B) Движение RCLS изображения. Четыре пути составляют замкнутое движение. Каждый путь проходит под углом 45°.Уравнения объединения (1,2), связь между временным контрастом и движением изображения можно описать как
TCON=1I(x,y)(Ix⋅Vx+Iy⋅Vy)=IxlnVx+IylnVy (3)
где Ixln=d(ln(I(x,y)))dx и Iyln=d(ln(I(x,y)))dy)))dy обозначают производные логарифмического поля интенсивности на пикселе по x и y соответственно . Затем изображения с более контрастными краями, как правило, приводят к большему количеству событий в их записях потока событий. Из-за времени отклика устройства движение не должно быть слишком быстрым.
Система записи
Разработана система записи, реализующая движение RCLS. ЖК-монитор используется для отображения движущихся изображений. Система записи содержит как аппаратную систему, так и программную систему. Ядром аппаратной системы является камера DVS, которая преобразует движущиеся объекты в потоки событий.
 Значения смещения используемой камеры DVS показаны в таблице 1. Камера установлена на кронштейне, который делает середину датчика высотой 250 мм, чтобы выровнять вертикальный центр монитора. Монитор подключен к хост-компьютеру. В отличие от Orchard et al. (2015), наша система записи не нуждается в двигателях и цепи управления. Записывающая система размещается в темном месте, чтобы подавить любой рассеянный свет окружающей среды.
Значения смещения используемой камеры DVS показаны в таблице 1. Камера установлена на кронштейне, который делает середину датчика высотой 250 мм, чтобы выровнять вертикальный центр монитора. Монитор подключен к хост-компьютеру. В отличие от Orchard et al. (2015), наша система записи не нуждается в двигателях и цепи управления. Записывающая система размещается в темном месте, чтобы подавить любой рассеянный свет окружающей среды.Таблица 1 . Значения смещения используемой камеры DVS.
Программная система, работающая на хост-компьютере, содержит компонент отображения изображения и компонент записи AER вывода DVS, как показано на рис. 2. Компонент отображения изображения основан на языке программирования Python. Загружается версия набора данных CIFAR-10 для Python, и каждое цветное изображение создается из трех матриц RGB. Компонент отображения изображения содержит программу отображения изображения и программу управления движением изображения. Программа отображения изображений отображает каждое изображение в окне.
 Окно дисплея представляет собой так называемое поле интенсивности. В окне дисплея каждое изображение перемещается, чтобы генерировать изменения интенсивности. Во время инициализации загружаются и конструируются выбранные изображения CIFAR-10. Задаются параметры движения и создается окно отображения, которое размещается в соответствующем месте монитора, чтобы камера DVS могла охватить максимально возможное поле обзора в окне отображения. Во время смены изображения новое изображение строится из набора данных через 2000 мс, поскольку движение изображения закончилось, поэтому на следующую запись не будет влиять последнее движение изображения. Кроме того, текущая запись сохраняется во время этого процесса. В процессе изменения размера изображение увеличивается с исходных 32 × 32 до 512 × 512 с использованием бикубической интерполяции. Записи будут очень нечеткими, когда на мониторе отображаются крошечные изображения с низким разрешением. При изменении размера края и текстуры изображений увеличиваются, чтобы лучше вписаться в поле зрения камеры DVS.
Окно дисплея представляет собой так называемое поле интенсивности. В окне дисплея каждое изображение перемещается, чтобы генерировать изменения интенсивности. Во время инициализации загружаются и конструируются выбранные изображения CIFAR-10. Задаются параметры движения и создается окно отображения, которое размещается в соответствующем месте монитора, чтобы камера DVS могла охватить максимально возможное поле обзора в окне отображения. Во время смены изображения новое изображение строится из набора данных через 2000 мс, поскольку движение изображения закончилось, поэтому на следующую запись не будет влиять последнее движение изображения. Кроме того, текущая запись сохраняется во время этого процесса. В процессе изменения размера изображение увеличивается с исходных 32 × 32 до 512 × 512 с использованием бикубической интерполяции. Записи будут очень нечеткими, когда на мониторе отображаются крошечные изображения с низким разрешением. При изменении размера края и текстуры изображений увеличиваются, чтобы лучше вписаться в поле зрения камеры DVS. Каждый замкнутый контур содержит четыре движущихся пути. Во время обработки пути 1, пути 2, пути 3, пути 4 увеличенное изображение перемещается равномерно с определенной скоростью. Во время каждого движения изображения замкнутый цикл повторяется несколько раз (т. е. 6 раз). После путь 4 конечного круга, отображение изображения заканчивается, и в программу записи AER отправляется сообщение. Направление каждого пути не строго горизонтальное или вертикальное, а под углом 45°, что обеспечивает синхронный захват градиентов интенсивности двух направлений.
Каждый замкнутый контур содержит четыре движущихся пути. Во время обработки пути 1, пути 2, пути 3, пути 4 увеличенное изображение перемещается равномерно с определенной скоростью. Во время каждого движения изображения замкнутый цикл повторяется несколько раз (т. е. 6 раз). После путь 4 конечного круга, отображение изображения заканчивается, и в программу записи AER отправляется сообщение. Направление каждого пути не строго горизонтальное или вертикальное, а под углом 45°, что обеспечивает синхронный захват градиентов интенсивности двух направлений.Рис. 2. (A) Аппаратный комплекс системы записи потока событий. Камера DVS размещена перед ЖК-монитором. (B) Управление движением изображения и часть дисплея, (C) Часть записи потока событий AER.
Компонент записи AER основан на jAER (Дельбрюк, 2006 г.), программном интерфейсе с открытым исходным кодом между камерой DVS и хост-компьютером, предоставленном группой Тоби Дельбрюка.
В нашей программе записи реализована межпроцессная связь с программой управления движением изображений для синхронизации отображения изображений и записи потоков событий. Когда на ЖК-мониторе отображается новое изображение, программа записи начинает фиксировать события AER. Когда замкнутый цикл движения изображения закончится, процесс автоматически сохранит поток событий.В таблице 2 представлена динамика движения изображения. Мы дискретизировали каждый путь на пять сегментов, используя четыре внутренние точки, чтобы реализовать плавное движение. В каждой точке изображение будет отображаться в течение примерно 10 мс, что быстрее, чем обновление экрана с частотой 60 Гц. Затем на каждом пути движущееся изображение будет захвачено в одной из пяти точек после обновления экрана, что также добавляет некоторую случайность в записи. Для захвата каждой записи требуется около 3200 мс (1200 мс движения по замкнутому контуру плюс 2000 мс для перехода между изображениями).
Таблица 2 .
Параметры компонента управления движением изображения при движении по замкнутому контуру.Оригинальный CIFAR-10 состоит из 60 000 цветных изображений в 10 классах, по 6 000 изображений в каждом классе. В нашем преобразовании 10 000 изображений выбираются случайным образом из CIFAR-10 по 1 000 изображений на класс, что соответствует MNIST-DVS. Вторая причина записи одной шестой исходного набора данных изображений на основе кадров — это огромный размер записей в хранилище.
Результаты
Свойства данных
Скрытые статистические свойства оказывают важное влияние на производительность алгоритмов классификации, управляемой событиями. Все записи CIFAR10-DVS были проанализированы для изучения некоторых основных статистических свойств (т. е. среднего значения и стандартного отклонения событий включения и выключения, среднего значения и отклонения адресов x и y, среднего значения и отклонения). диапазона x и y), как показано в таблице 3. Другие наборы данных нейроморфного зрения, т.
е. MNIST-DVS 2 , N-MNIST и N-Caltech201 3 также были проанализированы для проверки одинаковых статистических свойств для сравнения. В отличие от других наборов данных потока событий, в наборе данных CIFAR10-DVS относительно больше событий OFF, чем событий ON. Это может быть связано с тем, что изображения CIFAR-10 имеют сложные объекты и фоны, которые легче усиливают события OFF. Кроме того, датчики, основанные на событиях, практически не способны генерировать одинаковое количество событий ВКЛ и ВЫКЛ. Свойства используемой камеры DVS могут быть более чувствительными к отрицательным пороговым событиям. Как средние x-адреса, так и y-адреса зависят от размера изображения и содержимого изображения, что является хорошей функцией для классификации. Отношение количества событий ВКЛ к событиям ВЫКЛ зависит от различных объектов, что впоследствии может быть использовано в качестве признака для классификации.Таблица 3 . Статистические свойства четырех наборов данных нейроморфного зрения.
Спектральный анализ последовательности меток времени записи выполняется, как показано на рисунке 3A. Четкий пик на частоте 60 Гц, представленный частотой обновления ЖК-экрана 60 Гц, выходит из уровня шума. В Serrano-Gotarredona and Linares-Barranco (2015) предлагается метод настройки для удаления шума обновления. В этой работе метод настройки используется для удаления шума обновления наших наборов данных. На рис. 3В показан спектр результирующей повторно синхронизированной последовательности, где был удален пик 60 Гц. Кроме того, множественные низкочастотные пики также исчезли, что является частью процесса настройки.
Рисунок 3 . Анализ Фурье, показывающий влияние частоты обновления ЖК-экрана. (A) Вверху показан спектр последовательности временных меток записанных событий AER с четким пиком на частоте 60 Гц. Средняя разница между шипами составляет 3,20 мкс, а стандартное отклонение — 5,24 мкс. Внизу показана кривая частоты срабатывания потока событий.
(B) Вверху показан спектр той же записи после корректировки временных меток для удаления пика 60 Гц. Временные метки генерируются случайным образом с той же средней разницей во времени между пиками и стандартным отклонением, что и в (А) .На рис. 4 показаны реконструированные кадры 12 случайно выбранных примеров записей для каждой категории. Реконструкция выполняется во временном диапазоне 100 мс. Из-за разных свойств краев и контраста разных изображений ЦИФАР-10 некоторые записи на восстановленных кадрах четкие, а некоторые немного размыты. На рис. 5 показана средняя скорость стрельбы во времени для общих категорий в CIFAR-10. Замечено, что средняя скорострельность каждой категории составляет около определенной константы с небольшими периодическими возмущениями. Стандартное отклонение скорострельности имеет большое значение. Это явление может быть результатом разнообразия градиентов интенсивности изображений исходного набора данных CIFAR-10.
В процессе преобразования каждое изображение генерирует разное количество событий, что приводит к разным частотам срабатывания.Рисунок 4 . Матрица 12 × 10 реконструированных кадров случайно выбранных записей в CIFAR10-DVS. Слева направо столбцы представляют собой записи AER 10 категорий самолетов, автомобилей, птиц, кошек, оленей, собак, лягушек, лошадей, кораблей, грузовиков соответственно. При реконструкции события за определенный временной диапазон интегрируются в соответствующие значения пикселей.
Рисунок 5 . Средняя скорострельность (сплошная линия) и средняя скорострельность ± стандартное отклонение (пунктирная линия) для категорий CIFAR10-DVS.
Показатели производительности
Многие алгоритмы классификации на основе событий были предложены для решения задачи классификации записей DVS (Chen et al., 2012; Zhao et al., 2015; Peng et al., 2016). Здесь кратко представлены результаты классификации с использованием двух современных алгоритмов, чтобы обеспечить начальную точку отсчета классификации.
Подобно Орчарду и др. (2015), эти алгоритмы использовались без каких-либо модификаций, чтобы не акцентировать внимание на настройке и оптимизации алгоритмов в этой работе. Алгоритмы включают прямую сеть на основе пиков (Zhao et al., 2015) и классификатор машины опорных векторов (SVM), использующий функцию мешка событий (BOE) (Peng et al., 2016). Кроме того, был использован классификатор K-Nearest Neighbor (KNN) с восемью статистическими свойствами, чтобы предоставить первоначальные результаты для сравнения. Подробное описание каждого алгоритма можно найти в следующих описаниях алгоритмов.Классификация по статистике
Статистические свойства потоков событий можно использовать в качестве признаков для классификации. Классификатор KNN с k = 10 использовался для прогнозирования класса каждой записи. Девяносто процентов записей были выбраны случайным образом в качестве обучающей выборки, а остальные использовались в качестве проверочной выборки. Восемь статистических свойств, т.
е. количество событий (NoE), количество событий ON (NoONE), количество событий OFF (NoOFFE), отношение положительных событий к отрицательным событиям (RoPN), среднее значение адреса X (MNoXA), среднее значение Адрес Y (MNoYA), стандартное отклонение адреса X (SDoXA), стандартное отклонение адреса Y (SDoYA) использовались в качестве признака для классификации. Кроме того, вся статистика была объединена в вектор признаков и использована для классификации. Были проведены десятикратные перекрестные проверки. Для сравнения рассчитывали среднее значение и стандартное отклонение 10 результатов классификации для каждого статистического признака.Spiking Forward Neural Network (SFNN)
Управляемая событиями нейронная сеть (Zhao et al., 2015) представляет собой двухэтапный метод классификации (извлечение признаков и разработка классификатора). Био-вдохновленные коры-подобные функции извлекаются с использованием сети на основе свертки иерархии двух слоев (S1 и C1). На уровне S1 вводится свертка, управляемая событиями, с механизмом забывания для непрерывной обработки, управляемой событиями.
Нейроны слоя S1 конкурируют с локальными соседями посредством операции MAX, стремясь выжить в слое C1. В слое C1 выжившие нейроны представляют собой некоторые заметные элементы столбцов. Кроме того, вводится модуль детектора символов движения, состоящий из интегрирующего нейрона с утечкой и блока обнаружения пиков, для накопления событий в паттерн. Поток данных этапа извлечения признаков в системе SFNN можно обобщить как события движения → карты S1 → карты C1 . Карты S1 и C1 обновляются для каждого входящего пика. Сеть фильтров Габора, каждый из которых моделирует рецептивное поле определенного размера, используется для свертки входных событий. В нашей работе сеть фильтров имеет четыре масштаба (от трех до девяти с шагом два) и четыре ориентации (0°, 45°, 90°, 135°). Для классификации извлеченного признака используется правило обучения темпотрона. Темпотрон использует динамическую модель нейрона LIF, которая генерирует постсинаптический потенциал для каждого входного спайка, который имеет форму быстрого нарастания и медленного затухания. Количество входов сети темпотрона равно количеству откликов С1. Постоянная времени мембраны в темпотроне была установлена равной 0,02, скорость обучения — 0,1, а количество нейронов темпотрона для каждого класса — 10,9.0003Bag of Event (BOE)
Метод BOE (Peng et al., 2016) представляет собой алгоритм статистического обучения. BOE — это статистическая характеристика, которая используется для представления каждой записи. BOE сочетает в себе два показателя информационного содержания. Одним из измерений является частота событий, которая является оценкой вероятности того, что определенное событие действительно наблюдается. Другой — специальный показатель, отражающий объем информации после наблюдения за конкретным событием. BOE продемонстрировал отличительную особенность комбинации двух измерений. На основе функции BOE для классификации записей AER использовался классификатор машины опорных векторов (SVM). SVM является классификатором максимальной маржи, выбирая гиперплоскость таким образом, чтобы расстояние между гиперплоскостью и ближайшей точкой данных с каждой стороны было максимальным.
Кроме того, для классификации представления BOE записей AER использовался классификатор случайного леса (Breiman, 2001). В случайном лесу выращивается ансамбль деревьев (5000 деревьев в этой работе) и голосование за самый популярный класс, что приводит к значительному повышению точности классификации.Обсуждение
Таблица 4 показывает, что результаты классификации с использованием некоторых статистических признаков очень близки к случайным (10% для задачи с 10 классами). В статистической классификации представление признаков очень важно. В общем, различительные признаки являются хорошими предикторами принадлежности к классу для классов, которые мы пытаемся различить. Например, наличие или отсутствие колес отличает людей от автомобилей, но не отличает автомобили от поездов. Хорошая эффективность классификации будет достигнута, когда распределение статистического признака в одном классе мало перекрывается с распределением в другом классе. Поскольку все используемые статистические признаки имеют одно измерение, распределения признаков разных классов во многом перекрываются.
Более того, многие записи разных классов могут иметь одни и те же значения признаков. Например, средние значения MNoXA для всех классов распределяются в относительно большем диапазоне, чем для признака MNoYA, а стандартные отклонения MNoXA для всех классов больше, чем для MNoYA. Таким образом, эффективность классификации с использованием MNoXA лучше, чем с использованием MNoYA. Комбинация всех статистических данных обеспечивает лучшую точность классификации, чем один статистический признак, что демонстрирует, что он является более дискриминационным признаком.Таблица 4 . Точность классификации для CIFAR10-DVS.
Как показано в таблице 4, методы SFNN и BOT обеспечивают лучшую производительность, чем использование статистики записей. Однако точность классификации с использованием этих двух методов также относительно низка. Причина в том, что два метода классификации изначально были разработаны для более простых наборов данных (например, MNIST-DVS). Однако образцы CIFAR10-DVS имеют более сложные объекты, чем цифры в MNIST-DVS.
Как известно, набор данных CIFAR-10 обеспечивает более сложную задачу, чем задача MNIST в обычном компьютерном зрении. Кроме того, мы попытались повысить производительность, используя классификатор случайного леса для функций BOE. Когда в случайном лесу было выращено 5000 деревьев, точность классификации увеличилась до 29.0,45%. Этот набор данных предоставляет достаточно места для постоянного улучшения алгоритмов, управляемых событиями.Наконец, мы оценили влияние количества замкнутых циклов на скорость распознавания и время обработки, как показано в таблице 5. В этой оценке 1000 записей по 100 записей на класс были случайным образом выбраны из набора данных CIFAR10-DVS. В этом эксперименте используется метод классификации на основе BOE и SVM. Шесть различных количеств замкнутых петель (т. е. 1, 2, 3, 4, 5, 6) оценивали в шести экспериментах. В каждом опыте 90% экспериментальных записей используются для обучения, а остальные используются в качестве набора для тестирования. Каждый эксперимент повторялся десять раз с разными разделами обучающих и тестовых данных.
Время обработки представляет собой сумму затрат времени на извлечение признаков, времени обучения и времени тестирования. Эксперименты проводились на ПК с процессором Intel(R) Core(TM) i5-3317U-1,7 ГГц и 8 ГБ ОЗУ. Окончательные результаты содержат среднее значение и стандартное отклонение, точность классификации и время обработки. Результаты показывают, что по мере увеличения количества замкнутых циклов скорость распознавания увеличивается, а затраты вычислительного времени также увеличиваются.Таблица 5 . Распознавание и время обработки с увеличением количества замкнутых циклов.
Заключение
В этой статье мы предоставляем новый набор данных нейроморфного зрения под названием CIFAR10-DVS для классификации объектов на основе событий. Преобразование набора данных потока событий реализовано с использованием RCLS-движения изображений. Движение изображения приводит к изменению интенсивности поля зрения. Движение изображения с обратной связью в течение непрерывного времени преобразует богатые градиенты интенсивности изображения в изменения интенсивности.
Локальные относительные изменения интенсивности квантуются соответствующими пикселями нейроморфной камеры для генерации потоков событий. Движение изображения легко реализуется программированием на компьютере и близко к практическому применению. Например, фиксированная событийная камера реагирует только на движущиеся объекты, что снижает избыточность информации. Наша система записи может быть использована для простого преобразования других больших наборов данных изображений на основе кадров, при этом общее время преобразования масштабируется линейно с количеством изображений в наборе данных. Набор данных CIFAR10-DVS станет ресурсом данных для широкого круга связанных исследований, основанных на событиях или на основе точек. Возможные применения следующие.Тест распознавания объектов, управляемого событиями
CIFAR10-DVS предоставляет более сложный набор данных, чем записи потока событий набора данных MNIST, и относительно более простой тест, чем N-Caltech201, с меньшим количеством категорий.
Это будет новый и сложный эталонный набор данных для распознавания объектов на основе событий. Точность классификации трех алгоритмов, представленных в разделе «Обсуждение», представляет собой первоначальный ориентир для улучшения. Результаты классификации набора данных оставляют много возможностей для улучшения.Исследование модели человеческого зрения
Каждая запись CIFAR10-DVS фиксируется кремниевой сетчаткой, которая имитирует механизм кодирования информации человеческой сетчатки. Свойство события «все или ничего» похоже на спайк в нервной системе. В человеческом зрении визуальная информация преобразуется биологической сетчаткой в шипы и обрабатывается зрительной корой высокого уровня. Наборы данных о всплесках событий могут использоваться в качестве модуля визуального восприятия в модели человеческого зрения. Например, вопрос о том, как биологическая нейронная сеть считывает и обрабатывает информацию, основанную на выбросах, может быть исследован с использованием данных о выбросах событий.
Кроме того, на основе нейроморфных камер для обработки данных потока событий можно использовать основанную на мозге систему вычислений и познания. Например, для решения задачи классификации CIFAR10-DVS можно использовать аппаратную систему, вдохновленную мозгом.Ресурс данных пространственно-временного точечного процесса
В статистике точечный процесс — это тип случайного процесса, состоящего из набора изолированных точек либо во времени, либо в географическом пространстве. Каждое событие в данных потока событий похоже на точку в пространственно-временном шаблоне точек. Точечный процесс, значениями которого являются точечные паттерны, часто используется для моделирования многих видов данных, таких как всплески нейронов в вычислительной нейробиологии (Brown et al., 2004), положение деревьев или растений в лесном хозяйстве и экологии растений. Данные каждого потока событий представляют собой трехмерные пространственно-временные шаблоны событий, которые можно смоделировать с использованием теории точечных процессов.
CIFAR10-DVS предоставляет набор помеченных пространственно-временных точечных шаблонов. Одним из интересных направлений исследований является использование теории точечных процессов для моделирования пространственно-временных потоков событий.Вклад автора
Компания HLi выполнила преобразование набора данных, а также анализ и классификацию набора данных. HLiu разработал систему программного обеспечения и выполнил преобразование набора данных. XJ предложил направление исследования и обсудил результаты. Г.Л. принял участие в обработке данных и обсудил результаты. Л.С. предложил направление исследования и руководил проектом. HLi и LS составили рукопись. Все авторы обсудили результаты и прокомментировали рукопись.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Работа была частично поддержана Проектом NSFC (№ 61603209), Пекинской программой по изучению функциональных чипов и связанных с ними базовых технологий вычислительной системы класса десять миллионов, вдохновленной мозгом (Z151100000
1) и Исследованием вдохновленных мозгом Вычислительная система программы Университета Цинхуа (201410809www. garrickorchard.com/datasetsСсылки
Boahen, K.A. (2000). Связь точка-точка между нейроморфными чипами с использованием адресных событий. IEEE Trans. Цирк. Сист. II 47, 416–434. doi: 10.1109/82.842110
Полный текст CrossRef | Google Scholar
Брейман, Л. (2001). Случайные леса. Маха. Учиться. 45, 5–32. doi: 10.1023/A:1010933404324
Полный текст CrossRef | Google Scholar
Браун, Э. Н., Касс, Р. Э., и Митра, П. П. (2004). Анализ данных множественных нейронных импульсов: современное состояние и будущие задачи. Нац. Неврологи. 7, 456–461. doi: 10.1038/nn1228
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Чен С., Аксельрод П., Чжао Б., Карраско Дж. А., Линарес-Барранко Б. и Кулурселло Э. (2012). Эффективная упреждающая категоризация объектов и поз человека с датчиками изображения адресных событий. IEEE Trans. Анальный узор. Мах. Интел. 34, 302–313. doi: 10.1109/TPAMI.2011.
120PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
Дельбрюк, Т. (2006). Проект с открытым исходным кодом Java AER. Доступно в Интернете по адресу: http://sourceforge.net/projects/jaer/
Delbruck, T. (2008). «Динамическое цифровое зрение без рамок», в Proceedings of Intl. Симп. по электронике Secure-Life, Advanced Electronics for Quality Life and Society (Цюрих).
Google Scholar
Фей-Фей Л., Фергус Р. и Перона П. (2007). Изучение генеративных визуальных моделей на нескольких обучающих примерах: пошаговый байесовский подход протестирован на 101 категории объектов. Комп. Видение Изображение Понимание. 106, 59–70. doi: 10.1016/j.cviu.2005.09.012
Полный текст CrossRef | Google Scholar
Крижевский А. (2009). Изучение нескольких уровней функций из крошечных изображений . Магистерская работа, факультет компьютерных наук, Университет Торонто, Торонто.
Лекун, Ю., Боту, Л., Бенжио, Ю.
, и Хаффнер, П. (1998). Градиентное обучение применительно к распознаванию документов. Проц. IEEE 86, 2278–2324. дои: 10.1109/5.726791CrossRef Полный текст | Google Scholar
Лихтштайнер П., Пош К. и Пош К. (2008). Асинхронный временной контрастный датчик зрения с задержкой 128 128 120 дБ, 15 мкс. IEEE J. Solid State Circ. 43, 566–576. doi: 10.1109/JSSC.2007.
7 Полный текст CrossRef | Google Scholar
Маскелье, Т., и Торп, С.Дж. (2007). Неконтролируемое изучение визуальных особенностей за счет пластичности, зависящей от времени всплеска. Вычисление PLoS. биол. 3, 0247–0257. doi: 10.1371/journal.pcbi.0030031
Реферат PubMed | Полный текст перекрестной ссылки | Google Scholar
О’Коннор П., Нил Д., Лю С. К., Дельбрюк Т. и Пфайффер М. (2013). Классификация в реальном времени и слияние датчиков с мощной сетью глубоких убеждений. Фронт. Неврологи. 7:178. doi: 10.3389/fnins.2013.00178
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Орчард Г.
, Джаявант А., Коэн Г. К. и Такор Н. (2015). Преобразование наборов данных статических изображений в наборы нейроморфных данных с пиками с использованием саккад. Фронт. Неврологи. 9:437. doi: 10.3389/fnins.2015.00437PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Пэн X., Чжао Б., Ян Р., Тан Х. и Йи З. (2016). Пакет событий: эффективный метод извлечения признаков на основе вероятности для датчиков изображения AER. IEEE Trans. Нейронная сеть. Учиться. Сист. 28, 791–803. doi: 10.1109/TNNLS.2016.2536741
CrossRef Полный текст | Google Scholar
Серрано-Готарредона, Т., и Линарес-Барранко, Б. (2013). A 128×128 1,5% контрастность чувствительность 0,9% FPN Задержка 3 мкс 4 мВт асинхронный безрамочный датчик динамического зрения с трансимпедансным предусилителем. IEEE J. Solid State Circ. 48, 827–838. doi: 10.1109/JSSC.2012.2230553
CrossRef Полный текст | Google Scholar
Серрано-Готарредона, Т., и Линарес-Барранко, Б.
(2015). Покер-ДВС и МНИСТ-ДВ. Их история, как они были сделаны и другие подробности. Фронт. Неврологи. 9:481. doi: 10.3389/fnins.2015.00481Полный текст CrossRef | Академия Google
Сотирис, К., Канеллопулос, Д., и Пинтелас, П. (2006). Обработка несбалансированных наборов данных: обзор. ГЕСТЫ Междунар. Транс. Комп. науч. англ. 30, 25–36.
Google Scholar
Спрингенберг Дж. Т., Досовицкий А., Брокс Т. и Ридмиллер М. (2015). «Стремление к простоте: полностью сверточная сеть», в ICLR (Сан-Диего, Калифорния: Workshop Track).
Google Scholar
Тан К., Лалли С. и Орчард Г. (2015). Сравнительный анализ нейроморфного зрения: уроки, извлеченные из компьютерного зрения. Front Neurosci 9:374. doi: 10.3389/fnins.2015.00374
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Торп, С., Файз, Д., и Марло, К. (1996). Скорость обработки в зрительной системе человека. Природа 381, 520–522.
doi: 10.1038/381520a0PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Ян, М., Лю, С.-К., и Дельбрюк, Т. (2015). Датчик динамического зрения с временной контрастной чувствительностью 1% и асинхронным дельта-модулятором в пикселях для кодирования событий. IEEE J. Solid State Circ. 50, 2149–2160. doi: 10.1109/JSSC.2015.2425886
CrossRef Полный текст | Google Scholar
Чжао Б., Дин Р., Чен С., Линарес-Барранко Б. и Тан Х. (2015). Упреждающая категоризация событий движения AER с использованием функций, подобных коре головного мозга, в импульсной нейронной сети. IEEE Trans. Нейронная сеть. Учиться. Сист. 26, 1963–1977. doi: 10.1109/TNNLS.2014.2362542
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
Факты и цифры
Зубчатое зацепление – помимо ультратонких поверхностей, это наша основная специализация в DVS TECHNOLOGY GROUP.
Но зубчатая передача также является частью нашей бизнес-философии: взаимосвязь узкоспециализированных компетенций внутри Группы, буквально многовекового опыта машиностроения с современными цифровыми процессами и продуктовыми решениями и, прежде всего, человеческими навыками и способностями. Вот как мы создаем решения, которые превосходят все, что может быть создано суммой отдельных сделок. А это дает такой уровень эффективности, который позволяет быстро, гибко и экономично решать задачи машиностроения будущего.Ключевые направления
DVS Machine Tools & Automation, DVS Tools & Components, DVS Production
Годовой оборот DVS TECHNOLOGY GROUP / DVS AG (млн)
250
Члены группы
13 дочерних компаний
Сотрудники
1;400
БУДЕРУС Шлейфтехник
разрабатывает и производит высокоэффективные машины и решения для автоматизации, которые используются во всем мире, прежде всего в автомобильной промышленности.
ДИСКУС ВЕРКЕ Schleiftechnik
был пионером в специальной области торцевого шлифования и двойного шлифования с 1911.
Универсальная шлифовальная машина DVS
производит комбинированные станки для твердой обработки валов и компонентов патрона с межосевым расстоянием до 1800 мм.
ПИТТЛЕР Т & С
вот уже 130 лет является символом инноваций в области токарной обработки, зубообработки, фрезерования и высокоточной токарной обработки.
ПРЭВЕМА
разрабатывает и производит станки для механической обработки и изготовления зубчатых колес.
Компания является мировым лидером в области зубохонингования.РБК робототехника
уже почти два десятилетия является поставщиком решений в Европе для роботизированных систем с видеоуправлением, автоматизации и оптимизации процессов.
ВМЗ Цигенхайн
разрабатывает и производит станки для гибкой обработки волнообразных компонентов транспортных средств длиной до 4500 мм, которые полностью обрабатываются всего за один процесс наладки.
Компания также разрабатывает и серийно производит высокоточные мотор-шпиндели.Инструменты DVS
предлагает оригинальные инструментальные решения и всемирную технологическую поддержку PRÄWEMA для хонингования зубчатых колес, тем самым обеспечивая важную дополнительную ценность для производителей коробок передач.
НАКСОС-ДИСКУС
Компания NAXOS-DISKUS, основанная во Франкфурте-на-Майне в 1871 году, тесно сотрудничает с производителями шлифовальных станков DVS для разработки индивидуальных решений.
ВМС
— сервисная компания станков и их модулей.
Компания предлагает ремонт, техническое обслуживание и модернизацию под ключ.Производство ДВС
серийно производит детали для коробок передач легковых автомобилей для автомобильной промышленности и обеспечивает весь процесс мягкой и твердой обработки.
ДВС Производство Юг
использует технологию производства, основанную на Индустрии 4.0, для массового производства ступиц колес грузовых автомобилей для коммерческого транспорта.
ДВС Производство Китай
производит прецизионные компоненты для китайской автомобильной промышленности в Тайцане по образцу немецких производственных предприятий DVS.
CIFAR10-DVS: набор данных Event-Stream для классификации объектов
- Список журналов
- Передние нейроски
- т. 11; 2017
- PMC5447775
Передние неврологи. 2017; 11:309.
Published online 2017 May 30. doi: 10.3389/fnins.2017.00309
, 1 , 1 , 1, 2 , 1 and 1, *
Author information Article примечания Информация об авторских правах и лицензии Отказ от ответственности
Исследования нейроморфного зрения требуют высококачественных и достаточно сложных наборов данных потока событий для поддержки постоянного улучшения алгоритмов и методов. Однако создание наборов данных потока событий — трудоемкая задача, которую необходимо записывать с помощью нейроморфных камер. В настоящее время доступны ограниченные наборы данных о потоках событий. В этой работе, используя популярный набор данных компьютерного зрения CIFAR-10, мы преобразовали 10 000 изображений на основе кадров в 10 000 потоков событий с помощью датчика динамического зрения (DVS), предоставив набор данных потока событий промежуточной сложности в 10 различных классах, названных как «CIFAR10-DVS».
Преобразование набора данных событийного потока было реализовано повторным плавным перемещением кадров с обратной связью (RCLS). В отличие от преобразования покадровых изображений путем перемещения камеры, движение изображения является более реалистичным с точки зрения его практического применения. Повторяющееся движение изображения по замкнутому контуру генерирует богатые локальные изменения интенсивности в течение непрерывного времени, которые квантуются каждым пикселем камеры DVS для генерации событий. Кроме того, предоставляется эталон производительности в классификации объектов, управляемой событиями, на основе современных алгоритмов классификации. Эта работа предоставляет большой набор данных потока событий и начальный эталон для сравнения, который может ускорить разработку алгоритмов в распознавании образов и классификации объектов, управляемых даже.Ключевые слова: нейроморфное зрение, событийное зрение, датчик динамического зрения (DVS), адресное представление событий, безрамочное зрение -Gotarredona and Linares-Barranco, 2013; Yang et al.
, 2015), который преобразует визуальную информацию в потоки событий «адрес-событие-представление» (AER; Boahen, 2000), привлекает все большее внимание. Для распознавания образов и классификации объектов высококачественные наборы данных обеспечивают сложные ориентиры для поддержки непрерывной разработки и сравнения сложных и надежных алгоритмов и методов (Sotiris et al., 2006). В компьютерном зрении ряд хорошо зарекомендовавших себя наборов данных, например, CIFAR-10 (Крижевский, 2009 г.), MNIST (Lecun et al., 1998) и Caltech201 (Fei-Fei et al., 2007). Кроме того, они могут получать изображения на основе кадров или создавать наборы данных на основе кадров в Интернете или с помощью цифровых камер. Хотя многие высококачественные наборы данных способствовали развитию области компьютерного зрения (Tan et al., 2015), исследователям нейроморфного зрения доступно очень ограниченное количество наборов данных. В отличие от создания обычных наборов данных компьютерного зрения, очень сложно разработать набор данных нейроморфного зрения, собирая данные в Интернете. Таким образом, создание наборов данных для исследователей нейроморфного зрения является важной, но сложной задачей. Как правило, высококачественный набор данных классификации потоков событий должен создавать проблемы для современных алгоритмов, основанных на событиях. Это должно быть достаточно сложно, чтобы текущие алгоритмы не достигли почти идеальной точности даже перед лицом значительной алгоритмической оптимизации. Но задача не должна быть слишком сложной, чтобы можно было внести какие-либо существенные улучшения для достижения относительно хорошей точности.Преобразование существующего набора данных на основе кадров в версию потока событий экономит время, не пытаясь найти несколько объектов разных классов для записи и маркировки. Использование популярных наборов данных изображений упрощает сравнение двух сообществ. Недавно два популярных набора данных изображений были преобразованы в наборы данных потока событий. Одним из них является набор данных MNIST, который был преобразован в два набора данных нейроморфного зрения, то есть MNIST-DVS и N-MNIST (Orchard et al.
, 2015; Serrano-Gotarredona and Linares-Barranco, 2015). В наборе данных MNIST-DVS 10 000 цифр были выбраны из стандартного набора данных из 70 000 изображений и отображены на ЖК-мониторе в трех разных масштабах в течение примерно 2–3 с. При преобразовании набора данных N-MNIST все цифры MNIST были преобразованы в потоки событий с помощью асинхронного датчика изображения на основе времени (ATIS). Событий фонового шума немного, поскольку все цифры MNIST размещены на однородном фоне. Как известно, высокая точность была достигнута на двух нейроморфных версиях набора данных MNIST (Orchard et al., 2015; Zhao et al., 2015). Другой — набор данных Caltech201, который содержит 100 классов изображений, причем все они были преобразованы (Orchard et al., 2015). Естественные изображения Caltech201 сложнее, чем цифры MNIST. Будучи более сложным, 100 различных категорий набора данных затрудняют улучшение и оптимизацию текущих алгоритмов, управляемых событиями. Однако, несмотря на то, что версии событийного потока двух наборов данных изображений обеспечили хорошие ориентиры в нейроморфном зрении, нейроморфный набор данных средней сложности с меньшим количеством классов объектов, чем у N-Caltech201, и более сложными объектами, чем цифры, по-прежнему отсутствует. CIFAR-10 представляет собой более сложный набор данных изображений на основе кадров, чем MNIST, хотя в нем меньше категорий, чем в Caltech201. Текущая современная точность классификации для алгоритмов на основе кадров на CIFAR-10 составляет 96,53% (Springenberg et al., 2015). В этой статье CIFAR-10 преобразован в набор данных нейроморфного зрения среднего уровня в 10 классах.Существует два способа, которые обычно используются при преобразовании нейроморфных данных. Одним из способов является преобразование изображений на основе кадров в потоки событий путем моделирования (Masquelier and Thorpe, 2007; O’Connor et al., 2013). Моделирование не полностью соответствует реалистичной записи событийной камерой. Если изображение захвачено с помощью покадровой камеры, то временная информация неизбежно теряется. Кроме того, шум в реальном мире не представлен в моделировании. Второй способ — генерировать потоки событий с помощью нейроморфной камеры (Orchard et al., 2015; Serrano-Gotarredona and Linares-Barranco, 2015).
Гаррик Орчард (Orchard et al., 2015) использовал саккадное движение камеры, разработав поворотно-наклонную платформу с приводом для перемещения камеры ATIS перед ЖК-монитором. По сравнению с движением камеры движение изображения (Серрано-Готарредона и Линарес-Барранко, 2015) легче контролировать. Кроме того, движение изображения ближе к практическим приложениям, чем метод поворота и наклона. Например, нейроморфные камеры подходят для наблюдения за пешеходами или другими движущимися объектами.В этой статье мы создали набор данных пар событий под названием «CIFAR10-DVS» путем преобразования популярного набора данных изображений на основе кадров «CIFAR-10» с помощью камеры DVS (Lichtsteiner et al., 2008). Камера имеет пространственное разрешение 128 × 128. В названии набора данных «CIFAR10-DVS» «DVS» представляет камеру DVS, как и MNIST-DVS. Набор данных CIFAR-10 состоит из 60 000 цветных изображений 32 × 32 в 10 классах, по 6 000 изображений в каждом классе. При преобразовании было выбрано 1000 изображений на класс, что соответствует MNIST-DVS.
Преобразованные потоки событий изображений CIFAR-10 имеют более сложную пространственно-временную структуру, чем MNIST-DVS. Меньшее количество категорий делает созданный CIFAR10-DVS проще, чем N-Caltech201. Таким образом, CIFAR10-DVS представляет собой набор данных о потоке событий среднего уровня, обеспечивающий пространство для постоянного улучшения алгоритмов, управляемых событиями. Движение изображения используется для получения изменений интенсивности в поле зрения событийной камеры. Когда изменение интенсивности локального логарифма превышает предварительно определенный порог, генерируется событие. В отличие от метода движения камеры, движение изображения легче реализовать с помощью программирования на компьютере и ближе к практическим приложениям. В этой работе повторяющееся плавное движение изображения с обратной связью (RCLS) использовалось для создания богатых ориентированных градиентов интенсивности, захваченных нейроморфной камерой. Эта работа предоставляет большой набор данных потока событий и начальный эталон для сравнения, который может ускорить разработку алгоритмов, управляемых событиями, в распознавании объектов нейроморфного зрения.Оставшаяся часть этого документа состоит из четырех частей. В разделе «Материалы и методы» представлена система регистрации, состоящая из аппаратного комплекса и программного комплекса. В разделе «Свойства данных» представлены статистические свойства набора данных CIFAR10-DVS. В разделе «Показатели производительности» точность распознавания существующих алгоритмов представлена до завершения с выводом в разделе «Заключение».
В этом разделе представлены принцип и методология преобразования набора данных потока событий. В нашем методе записи не требуются сложные аппаратные модули. В разделе Повторяющееся гладкое движение с замкнутым контуром (RCLS) представлено движение RCLS, которое является основой нашего подхода. Раздел Система записи знакомит с аппаратными и программными модулями системы записи. Предлагаемый набор данных доступен онлайн 1 .
Повторяющееся плавное движение с обратной связью (RCLS)
В каждой записи DVS кластер событий формирует форму объекта.
Как правило, для определенного изображения большее количество событий, кроме событий окружающего шума, делает пространственно-временную форму объекта более четкой. Чтобы генерировать больше событий, камера событий должна фиксировать больше локальных изменений интенсивности. В данной работе движение изображения RCLS используется для преобразования ориентированных градиентов изображения в локальные относительные изменения интенсивности в поле зрения камеры DVS. Из-за времени отклика нейроморфного устройства плавное движение с соответствующей скоростью полезно для создания большего количества событий. На самом деле плавное движение также связано с человеческим зрением, потому что мы не можем очень хорошо ощущать прыгающие объекты из-за ограниченной скорости визуальной обработки (Торп и др., 19).96). Камера DVS специально разработана таким образом, что пиксель реагирует на временной контраст интенсивности и генерирует событие всякий раз, когда контраст превышает пороговое значение. Повторяющееся движение изображения по замкнутому контуру в течение непрерывного времени генерирует значительные локальные изменения интенсивности, и каждый пиксель камеры DVS непрерывно квантует локальные относительные изменения интенсивности для генерации событий. Частота событий или количество событий в течение временного интервала пропорциональна временному контрасту, который определяется какTCON=d(ln(I(x,y))dt=1I(x,y)dI(x,y)dt
(1)
где I(x, y) понижает яркость при положение (x, y) поля зрения нейроморфной камеры. Предположим, что поле зрения камеры DVS представляет собой двумерное поле интенсивности, а изображение на основе кадра расположено в поле интенсивности, как показано на рисунке . Каждое значение пикселя обозначает интенсивность соответствующей позиции в поле интенсивности. Движение изображения преобразует градиенты интенсивности изображения в изменения интенсивности во времени в поле интенсивности. Каждый пиксель независимо и в течение непрерывного времени квантует относительные изменения интенсивности соответствующей точки в поле интенсивности для генерации событий. Изменения интенсивности, вызванные движением по замкнутому контуру, показаны на рисунке. Замкнутое движение состоит из четырех путей, имитирующих саккаду биологического зрения.
Градиенты интенсивности двух направлений фиксируются нейроморфной камерой синхронно. Для каждой точки в поле интенсивности изменение интенсивности во времени представляется следующим образом:Открыть в отдельном окне
(A) Движение изображения по осям x и y одновременно во времени в 2D поле интенсивности. Движущееся изображение генерирует локальные изменения интенсивности как в направлении x, так и в направлении y одновременно. (B) Движение RCLS изображения. Четыре пути составляют замкнутое движение. Каждый путь проходит под углом 45°.
dI(x,y)dt=dI(x,y)dx⋅dxdt+dI(x,y)dy⋅dydt=Ix⋅Vx+Iy⋅Vy
(2)
где I x , I y представляют собой градиенты интенсивности изображения относительно пространственных координат x и y в двухмерном поле интенсивности соответственно. V x и V y скорости движущегося изображения в направлениях x и y .
Уравнение (2) описывает, как движение изображения приводит к изменению интенсивности поля интенсивности.Уравнения объединения (1,2), связь между временным контрастом и движением изображения можно описать как
TCON=1I(x,y)(Ix⋅Vx+Iy⋅Vy)=IxlnVx+IylnVy
(3)
где Ixln=d(ln(I(x,y)))dx и Iyln=d(ln(I(x,y)))dy)))dy обозначают производные логарифмического поля интенсивности на пикселе по x и y , соответственно. Затем изображения с более контрастными краями, как правило, приводят к большему количеству событий в их записях потока событий. Из-за времени отклика устройства движение не должно быть слишком быстрым.
Система регистрации
Разработана система регистрации, реализующая движение RCLS. ЖК-монитор используется для отображения движущихся изображений. Система записи содержит как аппаратную систему, так и программную систему. Ядром аппаратной системы является камера DVS, которая преобразует движущиеся объекты в потоки событий. Значения смещения используемой камеры DVS приведены в таблице.
Камера установлена на кронштейне, который делает середину сенсора высотой 250 мм, совмещая ее с вертикальным центром монитора. Монитор подключен к хост-компьютеру. В отличие от Orchard et al. (2015), наша система записи не нуждается в двигателях и цепи управления. Записывающая система размещается в темном месте, чтобы подавить любой рассеянный свет окружающей среды.Таблица 1
Значения смещения используемой камеры DVS.
Name of bias Value Brief description Pr 13.5 p First stage (“Photoreceptor”) cas 242. 5 pКаскод первой ступени foll 229.0 p Истоковый повторитель, разделяющий первую и вторую ступени diff 135.4 n Second stage (“Differential”) diffOn 2.2 u Threshold for On events diffOff 592.7 p Threshold for Off events injGnd 5,0 u Заземление req 714,6 n Pull down для инверторов пассивной нагрузки в цифровой схеме AER 5 90376 Refr 26. 9 pRefractory period PuX 75.3 u Pull up on request from X arbiter PuY 36.6 u Pull up on request from Y arbiter reqPd 75.3 u Pull down on chip request Открыть в отдельном окне как показано на рисунке . Компонент отображения изображений основан на языке программирования Python. Загружается версия набора данных CIFAR-10 для Python, и каждое цветное изображение создается из трех матриц RGB.
Компонент отображения изображения содержит программу отображения изображения и программу управления движением изображения. Программа отображения изображений отображает каждое изображение в окне. Окно дисплея представляет собой так называемое поле интенсивности. В окне дисплея каждое изображение перемещается, чтобы генерировать изменения интенсивности. Во время инициализации загружаются и конструируются выбранные изображения CIFAR-10. Задаются параметры движения и создается окно отображения, которое размещается в соответствующем месте монитора, чтобы камера DVS могла охватить максимально возможное поле обзора в окне отображения. Во время смены изображения новое изображение строится из набора данных через 2000 мс, поскольку движение изображения закончилось, поэтому на следующую запись не будет влиять последнее движение изображения. Кроме того, текущая запись сохраняется во время этого процесса. В процессе изменения размера изображение увеличивается с исходных 32 × 32 до 512 × 512 с использованием бикубической интерполяции. Записи будут очень нечеткими, когда на мониторе отображаются крошечные изображения с низким разрешением. При изменении размера края и текстуры изображений увеличиваются, чтобы лучше вписаться в поле зрения камеры DVS. Каждый замкнутый контур содержит четыре движущихся пути. Во время обработки пути 1, пути 2, пути 3, пути 4 увеличенное изображение перемещается равномерно с определенной скоростью. Во время каждого движения изображения замкнутый цикл повторяется несколько раз (т. е. 6 раз). После путь 4 конечного круга, отображение изображения заканчивается, и в программу записи AER отправляется сообщение. Направление каждого пути не строго горизонтальное или вертикальное, а под углом 45°, что обеспечивает синхронный захват градиентов интенсивности двух направлений.Открыть в отдельном окне
(А) Аппаратный комплекс системы регистрации потока событий. Камера DVS размещена перед ЖК-монитором. (B) Управление движением изображения и часть дисплея, (C) Часть записи потока событий AER.
Компонент записи AER основан на jAER (Дельбрюк, 2006 г.), программном интерфейсе с открытым исходным кодом между камерой DVS и хост-компьютером, предоставленном группой Тоби Дельбрюка. В нашей программе записи реализована межпроцессная связь с программой управления движением изображений для синхронизации отображения изображений и записи потоков событий. Когда на ЖК-мониторе отображается новое изображение, программа записи начинает фиксировать события AER. Когда замкнутый цикл движения изображения закончится, процесс автоматически сохранит поток событий.
Таблица показывает динамику движения изображения. Мы дискретизировали каждый путь на пять сегментов, используя четыре внутренние точки, чтобы реализовать плавное движение. В каждой точке изображение будет отображаться в течение примерно 10 мс, что быстрее, чем обновление экрана с частотой 60 Гц. Затем на каждом пути движущееся изображение будет захвачено в одной из пяти точек после обновления экрана, что также добавляет некоторую случайность в записи.
Для захвата каждой записи требуется около 3200 мс (1200 мс движения по замкнутому контуру плюс 2000 мс для перехода между изображениями).Таблица 2
Параметры компонента управления движением изображения при движении по замкнутому контуру.
State Start time Start (pixel) End (pixel) Speed (pixel/s) (ms) X Y X Y X Y Change and resize image 2,000 0 0 0 0 0 0 Path 1 50 0 0 10 −10 200 −200 Path 2 100 10 −10 20 0 200 200 Path 3 150 20 0 10 10 −200 200 Path 4 200 10 10 0 0 −200 −200 Открыть в отдельном окне
Исходный CIFAR-10 состоит из 60 000 цветных изображений по 100 классам по 100 классам.
В нашем преобразовании 10 000 изображений выбираются случайным образом из CIFAR-10 по 1 000 изображений на класс, что соответствует MNIST-DVS. Вторая причина записи одной шестой исходного набора данных изображений на основе кадров — это огромный размер записей в хранилище.Свойства данных
Скрытые статистические свойства оказывают большое влияние на производительность алгоритмов классификации, управляемой событиями. Все записи CIFAR10-DVS были проанализированы для изучения некоторых основных статистических свойств (т. е. среднего значения и стандартного отклонения событий включения и выключения, среднего значения и отклонения адресов x и y, среднего значения и отклонения). диапазона x и y), как показано в таблице. Другие наборы данных нейроморфного зрения, например, MNIST-DVS 2 , N-MNIST и N-Caltech201 3 , также были проанализированы для проверки тех же статистических свойств для сравнения. В отличие от других наборов данных потока событий, в наборе данных CIFAR10-DVS относительно больше событий OFF, чем событий ON.
Это может быть связано с тем, что изображения CIFAR-10 имеют сложные объекты и фоны, которые легче усиливают события OFF. Кроме того, датчики, основанные на событиях, практически не способны генерировать одинаковое количество событий ВКЛ и ВЫКЛ. Свойства используемой камеры DVS могут быть более чувствительными к отрицательным пороговым событиям. Как средние x-адреса, так и y-адреса зависят от размера изображения и содержимого изображения, что является хорошей функцией для классификации. Отношение количества событий ВКЛ к событиям ВЫКЛ зависит от различных объектов, что впоследствии может быть использовано в качестве признака для классификации.Таблица 3
Статистические свойства четырех наборов данных нейроморфного зрения.
Dataset CIFAR10-DVS MNIST-DVS N-MNIST N-Caltech201 Statistic Mean σ Среднее σ Среднее σ Mean σ ON events 86,551 29,182 36,522 934. 042,084 574 56,936 28,039 OFF events 11,852 23,815 37,219 964.22 2,088 623 58,180 30,021 X mean 67. 2411.46 62.11 2.43 17.66 5.05 100.72 57.78 Y mean 63.84 6.08 64.28 2.78 18.10 6.38 81. 2346.15 X range 126.99 0.02 126.99 0.12 34.00 0.00 198.53 43.08 Y range 127 0 125. 990.28 34.00 0.00 155.88 26.76 Open in a separate window
A спектральный анализ последовательности временных меток записи выполняется, как показано на рис. Четкий пик на частоте 60 Гц, представленный частотой обновления ЖК-экрана 60 Гц, выходит из уровня шума. В Serrano-Gotarredona and Linares-Barranco (2015) предлагается метод настройки для удаления шума обновления. В этой работе метод настройки используется для удаления шума обновления наших наборов данных. На рисунке показан спектр результирующей повторно синхронизированной последовательности, где был удален пик 60 Гц. Кроме того, множественные низкочастотные пики также исчезли, что является частью процесса настройки.
Открыть в отдельном окне
Анализ Фурье, показывающий влияние частоты обновления ЖК-экрана. (A) Вверху показан спектр последовательности временных меток записанных событий AER с четким пиком на частоте 60 Гц. Средняя разница между шипами составляет 3,20 мкс, а стандартное отклонение — 5,24 мкс. Внизу показана кривая частоты срабатывания потока событий. (B) Вверху показан спектр той же записи после корректировки временных меток для удаления пика 60 Гц. Временные метки генерируются случайным образом с той же средней разницей во времени между пиками и стандартным отклонением, что и в (А) .
На рисунке показаны реконструированные кадры 12 случайно выбранных примеров записей для каждой категории. Реконструкция выполняется во временном диапазоне 100 мс. Из-за разных свойств краев и контраста разных изображений ЦИФАР-10 некоторые записи на восстановленных кадрах четкие, а некоторые немного размыты. На рисунке показана средняя скорость стрельбы во времени для общих категорий в CIFAR-10.
Замечено, что средняя скорострельность каждой категории составляет около определенной константы с небольшими периодическими возмущениями. Стандартное отклонение скорострельности имеет большое значение. Это явление может быть результатом разнообразия градиентов интенсивности изображений исходного набора данных CIFAR-10. В процессе преобразования каждое изображение генерирует разное количество событий, что приводит к разным частотам срабатывания.Открыть в отдельном окне
Матрица 12×10 восстановленных кадров случайно выбранных записей в CIFAR10-DVS. Слева направо столбцы представляют собой записи AER 10 категорий самолетов, автомобилей, птиц, кошек, оленей, собак, лягушек, лошадей, кораблей, грузовиков соответственно. При реконструкции события за определенный временной диапазон интегрируются в соответствующие значения пикселей.
Открыть в отдельном окне
Средняя скорострельность (сплошная линия) и средняя скорострельность ± стандартное отклонение (пунктирная линия) для категорий CIFAR10-DVS.
Показатель производительности
Для решения задачи классификации записей DVS было предложено множество алгоритмов классификации на основе событий (Chen et al., 2012; Zhao et al., 2015; Peng et al., 2016). Здесь кратко представлены результаты классификации с использованием двух современных алгоритмов, чтобы обеспечить начальную точку отсчета классификации. Подобно Орчарду и др. (2015), эти алгоритмы использовались без каких-либо модификаций, чтобы не акцентировать внимание на настройке и оптимизации алгоритмов в этой работе. Алгоритмы включают прямую сеть на основе пиков (Zhao et al., 2015) и классификатор машины опорных векторов (SVM), использующий функцию мешка событий (BOE) (Peng et al., 2016). Кроме того, был использован классификатор K-Nearest Neighbor (KNN) с восемью статистическими свойствами, чтобы предоставить первоначальные результаты для сравнения. Подробное описание каждого алгоритма можно найти в следующих описаниях алгоритмов.
Классификация по статистике
Статистические свойства потоков событий можно использовать в качестве признаков для классификации.
Классификатор KNN с k = 10 использовался для прогнозирования класса каждой записи. Девяносто процентов записей были выбраны случайным образом в качестве обучающей выборки, а остальные использовались в качестве проверочной выборки. Восемь статистических свойств, т. е. количество событий (NoE), количество событий ON (NoONE), количество событий OFF (NoOFFE), отношение положительных событий к отрицательным событиям (RoPN), среднее значение адреса X (MNoXA), среднее значение Адрес Y (MNoYA), стандартное отклонение адреса X (SDoXA), стандартное отклонение адреса Y (SDoYA) использовались в качестве признака для классификации. Кроме того, вся статистика была объединена в вектор признаков и использована для классификации. Были проведены десятикратные перекрестные проверки. Для сравнения рассчитывали среднее значение и стандартное отклонение 10 результатов классификации для каждого статистического признака.Нейронная сеть прямого действия (SFNN)
Нейронная сеть, управляемая событиями (Zhao et al.
, 2015), представляет собой двухэтапный метод классификации (извлечение признаков и разработка классификатора). Био-вдохновленные коры-подобные функции извлекаются с использованием сети на основе свертки иерархии двух слоев (S1 и C1). На уровне S1 вводится свертка, управляемая событиями, с механизмом забывания для непрерывной обработки, управляемой событиями. Нейроны слоя S1 конкурируют с локальными соседями посредством операции MAX, стремясь выжить в слое C1. В слое C1 выжившие нейроны представляют собой некоторые заметные элементы столбцов. Кроме того, вводится модуль детектора символов движения, состоящий из интегрирующего нейрона с утечкой и блока обнаружения пиков, для накопления событий в паттерн. Поток данных этапа извлечения признаков в системе SFNN можно обобщить как события движения → карты S1 → карты C1 . Карты S1 и C1 обновляются для каждого входящего пика. Сеть фильтров Габора, каждый из которых моделирует рецептивное поле определенного размера, используется для свертки входных событий. В нашей работе сеть фильтров имеет четыре масштаба (от трех до девяти с шагом два) и четыре ориентации (0°, 45°, 90°, 135°). Для классификации извлеченного признака используется правило обучения темпотрона. Темпотрон использует динамическую модель нейрона LIF, которая генерирует постсинаптический потенциал для каждого входного спайка, который имеет форму быстрого нарастания и медленного затухания. Количество входов сети темпотрона равно количеству откликов С1. Постоянная времени мембраны в темпотроне была установлена равной 0,02, скорость обучения — 0,1, а количество нейронов темпотрона для каждого класса — 10,9.0003Пакет событий (BOE)
Метод BOE (Peng et al., 2016) представляет собой алгоритм статистического обучения. BOE — это статистическая характеристика, которая используется для представления каждой записи. BOE сочетает в себе два показателя информационного содержания. Одним из измерений является частота событий, которая является оценкой вероятности того, что определенное событие действительно наблюдается.
Другой — специальный показатель, отражающий объем информации после наблюдения за конкретным событием. BOE продемонстрировал отличительную особенность комбинации двух измерений. На основе функции BOE для классификации записей AER использовался классификатор машины опорных векторов (SVM). SVM является классификатором максимальной маржи, выбирая гиперплоскость таким образом, чтобы расстояние между гиперплоскостью и ближайшей точкой данных с каждой стороны было максимальным. Кроме того, для классификации представления BOE записей AER использовался классификатор случайного леса (Breiman, 2001). В случайном лесу выращивается ансамбль деревьев (5000 деревьев в этой работе) и голосование за самый популярный класс, что приводит к значительному повышению точности классификации.Обсуждение
Таблица показывает, что результаты классификации с использованием некоторых статистических признаков очень близки к случайным (10% для задачи 10 классов). В статистической классификации представление признаков очень важно.
В общем, различительные признаки являются хорошими предикторами принадлежности к классу для классов, которые мы пытаемся различить. Например, наличие или отсутствие колес отличает людей от автомобилей, но не отличает автомобили от поездов. Хорошая эффективность классификации будет достигнута, когда распределение статистического признака в одном классе мало перекрывается с распределением в другом классе. Поскольку все используемые статистические признаки имеют одно измерение, распределения признаков разных классов во многом перекрываются. Более того, многие записи разных классов могут иметь одни и те же значения признаков. Например, средние значения MNoXA для всех классов распределяются в относительно большем диапазоне, чем для признака MNoYA, а стандартные отклонения MNoXA для всех классов больше, чем для MNoYA. Таким образом, эффективность классификации с использованием MNoXA лучше, чем с использованием MNoYA. Комбинация всех статистических данных обеспечивает лучшую точность классификации, чем один статистический признак, что демонстрирует, что он является более дискриминационным признаком.Таблица 4
Точность классификации для CIFAR10-DVS.
STATISTICS KNN ( K = 10) Mean accuracy ± std Number of events 13.34 ± 0.75% Number of ON events 12,12 ± 1,03% Количество событий ВЫКЛ 13,26 ± 0,99% Отношение положительных событий к отрицательным 11. 71 ± 1.02%Mean of x address 15.01 ± 1.34% Mean of y address 10.61 ± 0.64% Standard deviation of x address 14.15 ± 1.03% Standard deviation of y address 12.70 ± 0.82% All 16.80 ± 1.10% SFNN 22. 10 ± 0.87%BOE-SVM 24,21 ± 1,23% Boe-Random Forest 29,67 ± 1,34% Открытые в отдельном окне
. записи. Однако точность классификации с использованием этих двух методов также относительно низка. Причина в том, что два метода классификации изначально были разработаны для более простых наборов данных (например, MNIST-DVS). Однако образцы CIFAR10-DVS имеют более сложные объекты, чем цифры в MNIST-DVS. Как известно, набор данных CIFAR-10 обеспечивает более сложную задачу, чем задача MNIST в обычном компьютерном зрении. Кроме того, мы попытались повысить производительность, используя классификатор случайного леса для функций BOE. Когда в случайном лесу было выращено 5000 деревьев, точность классификации увеличилась до 29.
0,45%. Этот набор данных предоставляет достаточно места для постоянного улучшения алгоритмов, управляемых событиями.Наконец, мы оценили влияние количества замкнутых циклов на скорость распознавания и время обработки, как показано в таблице. В этой оценке 1000 записей по 100 записей на класс были случайным образом выбраны из набора данных CIFAR10-DVS. В этом эксперименте используется метод классификации на основе BOE и SVM. Шесть различных количеств замкнутых петель (т. е. 1, 2, 3, 4, 5, 6) оценивали в шести экспериментах. В каждом опыте 90% экспериментальных записей используются для обучения, а остальные используются в качестве набора для тестирования. Каждый эксперимент повторялся десять раз с разными разделами обучающих и тестовых данных. Время обработки представляет собой сумму затрат времени на извлечение признаков, времени обучения и времени тестирования. Эксперименты проводились на ПК с процессором Intel(R) Core(TM) i5-3317U-1,7 ГГц и 8 ГБ ОЗУ. Окончательные результаты содержат среднее значение и стандартное отклонение, точность классификации и время обработки.
Результаты показывают, что по мере увеличения количества замкнутых циклов скорость распознавания увеличивается, а затраты вычислительного времени также увеличиваются.Таблица 5
Время распознавания и обработки при увеличении количества замкнутых контуров.
Number of closed loops Recognition accuracy (mean ± std) Processing time (mean ± std) 1 16.71 ± 3.87% 201.58 ± 0,51 с 2 18,64 ± 3,83% 424,09 ± 0,89 с 3 19. 76 ± 3.15%642.43 ± 1.24 s 4 20.80 ± 4.13% 865.87 ± 1.61 s 5 21.76 ± 3.22% 1052.9 ± 1.08 s 6 22,70 ± 3,32% 1545,2 ± 2,50 с Открыть в отдельном окне
в этой статье, мы предоставляем новую невроморфу. Преобразование набора данных потока событий реализовано с использованием RCLS-движения изображений.
Движение изображения приводит к изменению интенсивности поля зрения. Движение изображения с обратной связью в течение непрерывного времени преобразует богатые градиенты интенсивности изображения в изменения интенсивности. Локальные относительные изменения интенсивности квантуются соответствующими пикселями нейроморфной камеры для генерации потоков событий. Движение изображения легко реализуется программированием на компьютере и близко к практическому применению. Например, фиксированная событийная камера реагирует только на движущиеся объекты, что снижает избыточность информации. Наша система записи может быть использована для простого преобразования других больших наборов данных изображений на основе кадров, при этом общее время преобразования масштабируется линейно с количеством изображений в наборе данных. Набор данных CIFAR10-DVS станет ресурсом данных для широкого круга связанных исследований, основанных на событиях или на основе точек. Возможные применения следующие.Тест распознавания объектов на основе событий
CIFAR10-DVS предоставляет более сложный набор данных, чем записи потока событий набора данных MNIST, и относительно более простой тест, чем N-Caltech201, с меньшим количеством категорий.
Это будет новый и сложный эталонный набор данных для распознавания объектов на основе событий. Точность классификации трех алгоритмов, представленных в разделе «Обсуждение», представляет собой первоначальный ориентир для улучшения. Результаты классификации набора данных оставляют много возможностей для улучшения.Исследование модели человеческого зрения
Каждая запись CIFAR10-DVS фиксируется кремниевой сетчаткой, которая имитирует механизм кодирования информации человеческой сетчатки. Свойство события «все или ничего» похоже на спайк в нервной системе. В человеческом зрении визуальная информация преобразуется биологической сетчаткой в шипы и обрабатывается зрительной корой высокого уровня. Наборы данных о всплесках событий могут использоваться в качестве модуля визуального восприятия в модели человеческого зрения. Например, вопрос о том, как биологическая нейронная сеть считывает и обрабатывает информацию, основанную на выбросах, может быть исследован с использованием данных о выбросах событий.
Кроме того, на основе нейроморфных камер для обработки данных потока событий можно использовать основанную на мозге систему вычислений и познания. Например, для решения задачи классификации CIFAR10-DVS можно использовать аппаратную систему, вдохновленную мозгом.Ресурс данных пространственно-временного точечного процесса
В статистике точечный процесс — это тип случайного процесса, состоящего из набора изолированных точек либо во времени, либо в географическом пространстве. Каждое событие в данных потока событий похоже на точку в пространственно-временном шаблоне точек. Точечный процесс, значениями которого являются точечные паттерны, часто используется для моделирования многих видов данных, таких как всплески нейронов в вычислительной нейробиологии (Brown et al., 2004), положение деревьев или растений в лесном хозяйстве и экологии растений. Данные каждого потока событий представляют собой трехмерные пространственно-временные шаблоны событий, которые можно смоделировать с использованием теории точечных процессов.
CIFAR10-DVS предоставляет набор помеченных пространственно-временных точечных шаблонов. Одним из интересных направлений исследований является использование теории точечных процессов для моделирования пространственно-временных потоков событий.Компания HLi выполнила преобразование набора данных, а также анализ и классификацию набора данных. HLiu разработал систему программного обеспечения и выполнил преобразование набора данных. XJ предложил направление исследования и обсудил результаты. Г.Л. принял участие в обработке данных и обсудил результаты. Л.С. предложил направление исследования и руководил проектом. HLi и LS составили рукопись. Все авторы обсудили результаты и прокомментировали рукопись.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Работа была частично поддержана Проектом NSFC (№ 61603209), Пекинской программой по изучению функционального чипа и связанных с ними базовых технологий вычислительной системы, вдохновленной мозгом, класса десять миллионов (Z151100000
1) и Исследованием вычислительной системы, вдохновленной мозгом, Программа Университета Цинхуа (20141080934, 20151080467). 1 https://figshare.com/s/d03a
824536f12a8 2 http://www2.imse-cnm.csic.es/caviar/MNISTDVS.html
2 396012
2 / наборы данных- Боахен К. А. (2000). Связь точка-точка между нейроморфными чипами с использованием адресных событий. IEEE транс. Цирк. Сист. II 47, 416–434. 10.1109/82.842110 [CrossRef] [Google Scholar]
- Брейман Л. (2001). Случайные леса. Мах. Учиться. 45, 5–32. 10.1023/А:1010933404324 [CrossRef] [Google Scholar]
- Браун Э. Н., Касс Р. Э., Митра П. П. (2004). Анализ данных множественных нейронных импульсов: современное состояние и будущие задачи. Нац. Неврологи. 7, 456–461. 10.1038/nn1228 [PubMed] [CrossRef] [Google Scholar]
- Чен С., Аксельрод П., Чжао Б., Карраско Дж. А., Линарес-Барранко Б., Кулурселло Э. (2012). Эффективная упреждающая категоризация объектов и поз человека с датчиками изображения адресных событий. IEEE транс. Анальный узор. Мах. Интел.
34, 302–313. 10.1109/TPAMI. 2011.120 [PubMed] [CrossRef] [Google Scholar]
- Delbrück T. (2006). Проект с открытым исходным кодом Java AER. Доступно в Интернете по адресу: http://sourceforge.net/projects/jaer/ [Google Scholar]
- Delbruck T. (2008). Безрамочное динамическое цифровое зрение, Proceedings of Intl. Симп. по электронике Secure-Life, Advanced Electronics for Quality Life and Society (Цюрих: ). [Google Scholar]
- Фей-Фей Л., Фергус Р., Перона П. (2007). Изучение генеративных визуальных моделей на нескольких обучающих примерах: пошаговый байесовский подход протестирован на 101 категории объектов. Комп. Видение Изображение Понимание. 106, 59–70. 10.1016/j.cviu.2005.09.012 [CrossRef] [Google Scholar]
- Крижевский А. (2009). Изучение нескольких слоев функций из крошечных изображений. Магистерская работа, факультет компьютерных наук, Университет Торонто, Торонто. [Google Scholar]
- Lecun Y., Bottou L., Bengio Y., Haffner P. (1998). Градиентное обучение применительно к распознаванию документов. проц. IEEE
86, 2278–2324. 10.1109/5.726791 [CrossRef] [Google Scholar]
- Lichtsteiner P., Posch C., Posch C. (2008). Асинхронный временной контрастный датчик зрения с задержкой 128 128 120 дБ, 15 мкс. IEEE J. Solid State Circ.
43, 566–576. 10.1109/JSSC.2007.
7 [CrossRef] [Google Scholar] - Masquelier T., Thorpe S. J. (2007). Неконтролируемое изучение визуальных особенностей за счет пластичности, зависящей от времени всплеска. PLoS-компьютер. биол. 3, 0247–0257. 10.1371/journal.pcbi.0030031 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
- О’Коннор П., Нил Д., Лю С. К., Дельбрюк Т., Пфайффер М. (2013). Классификация в реальном времени и слияние датчиков с мощной сетью глубоких убеждений. Фронт. Неврологи. 7:178. 10.3389/fnins.2013.00178 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
- Орчард Г., Джаявант А., Коэн Г.К., Такор Н. (2015). Преобразование наборов данных статических изображений в наборы нейроморфных данных с пиками с использованием саккад.
Фронт. Неврологи.
9:437. 10.3389/fnins.2015.00437 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]- Peng X., Zhao B., Yan R., Tang H., Yi Z. (2016). Пакет событий: эффективный метод извлечения признаков на основе вероятности для датчиков изображения AER. IEEE транс. Нейронная сеть. Учиться. Сист. 28, 791–803. 10.1109/TNNLS.2016.2536741 [PubMed] [CrossRef] [Google Scholar]
- Серрано-Готарредона Т., Линарес-Барранко Б. (2013). 128×128 1,5% контрастная чувствительность 0,9% FPN задержка 3 мкс 4 мВт асинхронный бескадровый датчик динамического зрения с трансимпедансным предусилителем. IEEE J. Solid State Circ. 48, 827–838. 10.1109/JSSC.2012.2230553 [CrossRef] [Google Scholar]
- Серрано-Готарредона Т., Линарес-Барранко Б. (2015). Покер-ДВС и МНИСТ-ДВ. Их история, как они были сделаны и другие подробности. Фронт. Неврологи. 9:481 10.3389/fnins.2015.00481 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
- Сотирис К., Канеллопулос Д.
Наверх