Роботизированная коробка Лада Х-Рей (Lada Xray) — АМТ ВАЗ 21827: ресурс, надежность, плюсы и минусы |
Из сегодняшней статьи вы узнаете, каким ресурсом, надежностью, плюсами и минусами обладает роботизированная 5-ти диапазонная коробка переключения передач (5-РКПП) с типом действия АМТ серии ВАЗ 21827, которой оснащается переднеприводной хэтчбек Лада Х—Рей (Lada Xray) первой генерации в кузове GAB. Кроме того, в публикации будет рассказано о том, какие двигатели модели агрегатируются с “роботом” и, каким расходом топлива обладает отечественный автомобиль, комплектуемый роботизированной трансмиссией.
РЕКОМЕНДУЕМ К ПРОЧТЕНИЮ: ОБЗОР МОТОРА UAZ PATRIOT — ЗМЗ 409051 2.7 MPI 150 Л.С
Ежедневно ценителей двух педальных машин среди российских автомобилистов становится все больше и больше. И уже нет ничего удивительного в том, что большинство автопроизводителей оснащают автоматическими типами трансмиссий, как премиальные, так и бюджетные модели. Выход на российский автомобильный рынок компактного пятидверного хэтчбека Лада Х—Рей (он же, Икс Рей) по вполне естественным соображениям подразумевал наличие у этой современной модели автоматической коробки передач. Отечественный автоконцерн ОАО “АвтоВАЗ” не намерен был отставать от мировых трендов, поэтому также решил комплектовать свою самую ходовую модель одним из типов автоматических трансмиссий собственной разработки.
Выход на российский автомобильный рынок компактного пятидверного хэтчбека Лада Х—Рей (он же, Икс Рей) по вполне естественным соображениям подразумевал наличие у этой современной модели автоматической коробки передач. Отечественный автоконцерн ОАО “АвтоВАЗ” не намерен был отставать от мировых трендов, поэтому также решил комплектовать свою самую ходовую модель одним из типов автоматических трансмиссий собственной разработки.
Описание характеристик бензинового мотора h5M 1.6 MPI 16v 110 л.с, вы найдете здесь.
Перед российскими специалистами была поставлена задача по разработке современного, технологичного и относительно недорогого автомобиля. Что же решили сделать вазовские инженеры, чтобы удовлетворить потребности потенциальных покупателей в плане трансмиссии? По причине бюджетных соображений, отечественные специалисты сразу же отбросили вариант хэтчбека с традиционным пяти скоростным “гидроавтоматом”, потому как этот вариант сказался бы на удорожании стоимости новой Lada Xray. Правда оставался еще один вариант оснащения модели четырех диапазонным “автоматом” с гидротрансформатором от компании Jatco. Однако проанализировав все за и против, специалисты пришли к выводу, что установка “морально устаревшей” трансмиссии будет совершенно бессмысленной, так как имидж автомобиля, в плане его технологичности, будет сильно подорван.
Правда оставался еще один вариант оснащения модели четырех диапазонным “автоматом” с гидротрансформатором от компании Jatco. Однако проанализировав все за и против, специалисты пришли к выводу, что установка “морально устаревшей” трансмиссии будет совершенно бессмысленной, так как имидж автомобиля, в плане его технологичности, будет сильно подорван.
С характеристиками силовых агрегатов Лада Х—Рей Кросс, вы можете ознакомиться здесь.
В итоге вазовские инженеры остановили свой взор на отечественной роботизированной трансмиссии серии ВАЗ 2182, которая была ранее успешно опробована на Лада Приора, Лада Гранта, Лада Калина и Лада Веста. Первые модификации этого “робота” шли с заводской серией ВАЗ 21826. Новую Лада Х—Рей было решено оснастить обновленной версией трансмиссии, которая получила рабочий индекс ВАЗ 21827. По мнению автоэкспертов, роботизированную 5-ти диапазонную коробку передач АМТ серии ВАЗ 21827 можно отнести к золотой середине относительно качества компонентов, стоимости обслуживания и удобства в использовании. Таким образом, пяти ступенчатая роботизированная трансмиссия АМТ серии ВАЗ 21827 стала компромиссным решением для пятидверного хэтчбека Lada Xray. Для справки заметим, что версия модели Х—Рей Кросс, вместо “робота” АМТ оснащается бесступенчатым вариатором CVT серии JF015E от Jatco.
По мнению автоэкспертов, роботизированную 5-ти диапазонную коробку передач АМТ серии ВАЗ 21827 можно отнести к золотой середине относительно качества компонентов, стоимости обслуживания и удобства в использовании. Таким образом, пяти ступенчатая роботизированная трансмиссия АМТ серии ВАЗ 21827 стала компромиссным решением для пятидверного хэтчбека Lada Xray. Для справки заметим, что версия модели Х—Рей Кросс, вместо “робота” АМТ оснащается бесступенчатым вариатором CVT серии JF015E от Jatco.
Инструкцию по установке резинки-уплотнителя багажника Лада Х—Рей, вы найдете здесь.
Какие двигатели Лада Х—Рей агрегатируются с “роботом” АМТ серии ВАЗ 21827?
На сегодняшний день, пяти диапазонная роботизированная коробка переключения передач АМТ серии ВАЗ 21827, которой комплектуется Лада Х—Рей, работает в паре только с двумя 16-ти клапанными бензиновыми силовыми агрегатами атмосферного типа: ВАЗ 21129 1. 6 MPI 16v 106 л.с и ВАЗ 21179 1.8 MPI 16v 122 л.с.
6 MPI 16v 106 л.с и ВАЗ 21179 1.8 MPI 16v 122 л.с.
Смешанный расход топлива у модели, оснащенной мотором ВАЗ 21129 1.6 в сочетании с 5-РКПП типа АМТ серии ВАЗ 21827 составляет 7.0 литров (в городе — 9.0 литров, на трассе — 5.9 литра) бензина марки АИ-92.
Комбинированный расход горючего у хэтчбека, оснащенного движком ВАЗ 21179 1.8 в компании с 5-РКПП типа АМТ серии ВАЗ 21827 составляет 6.8 литра (город — 8.6 литра, трасса — 5.8 литра) бензина марки АИ-92.
Технические характеристики двигателя ВАЗ 21179 1.8 MPI 16v 122 л.с, находятся здесь.
Подробное описание мотора ВАЗ 21129 1.6 MPI 16v 106 л.с, вы найдете здесь.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ РОБОТИЗИРОВАННОЙ ТРАНСМИССИИ AMT ВАЗ 21827
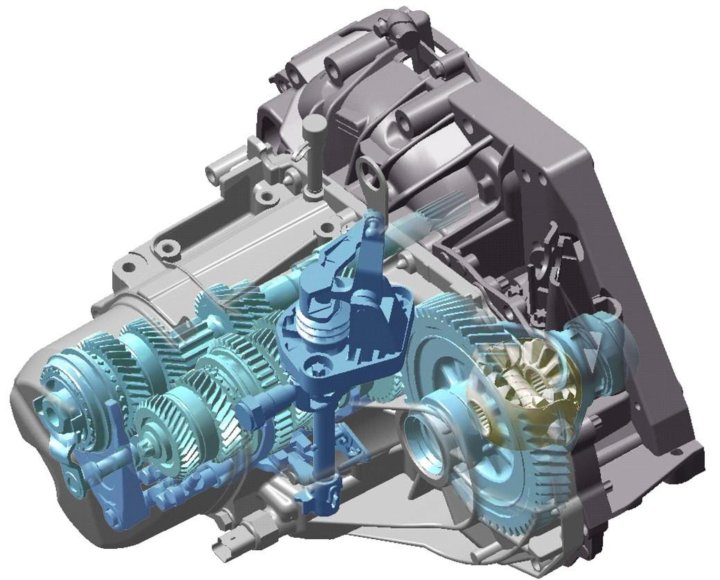
Идеи по созданию собственной автоматической трансмиссии вазовские инженеры вынашивали довольно давно, однако навыков и квалификации у специалистов было недостаточно. Поэтому в очередной раз было решено обратиться за помощью к зарубежным конструкторам. Первое время длительные переговоры велись с итальянским концерном Magneti Marelli, однако полученное чуть позже коммерческое предложение от немецкой компании Zahnrad Fabrik (сокращенно “ZF”) выглядело более предпочтительно. Таким образом, вазовскими специалистами было решено оснастить свою самую современную на тот период времени отечественную механическую трансмиссию серии ВАЗ 2180 электромеханическими актуаторами от ZF.
По результатам модернизации “механики” серии ВАЗ 2180, которую оснастили электронным блоком управления, немецкими актуаторами ZF, сцеплением Valeo, многокорпусными синхронизаторами, у отечественной компании из Тольятти получился типовой пяти диапазонный “робот” с электроприводом одного единственного диска сцепления. Новая или глубоко модернизированная 5-РКПП стала называться АМТ и получила свой собственный заводской индекс ВАЗ 21827. Стоит сказать, что модели подобных роботизированных коробок передач в свое время были довольно востребованы у японских и европейских производителей. Правда на сегодняшний день, практически все ведущие мировые автоконцерны, от “роботов” такого типа окончательно отказались в пользу более современных трансмиссий — преселективных роботизированных коробок передач с двумя мокрыми или сухими сцеплениями.
Новая или глубоко модернизированная 5-РКПП стала называться АМТ и получила свой собственный заводской индекс ВАЗ 21827. Стоит сказать, что модели подобных роботизированных коробок передач в свое время были довольно востребованы у японских и европейских производителей. Правда на сегодняшний день, практически все ведущие мировые автоконцерны, от “роботов” такого типа окончательно отказались в пользу более современных трансмиссий — преселективных роботизированных коробок передач с двумя мокрыми или сухими сцеплениями.
По заявлениям завода-изготовителя, компании ОАО “АвтоВАЗ”, трансмиссионное масло в роботизированной коробке передач АМТ серии ВАЗ 21827 залито на весь срок службы узла, поэтому периодическая замена технической жидкости, как в классическом “гидроавтомате” или бесступенчатом вариаторе CVT, конструктивно не предусмотрена.
Справочно заметим, что отечественный пяти диапазонный “робот” АМТ серии ВАЗ 21827 характеризуется следующими показателями передаточных чисел: I передача – 3. 636 единиц; II передача – 1.950 единиц; III передача – 1.357 единиц; IV передача – 0.941 единиц; V передача – 0.784 единиц; главная передача – 3.938 единиц; задняя передача – 3.500 единиц.
636 единиц; II передача – 1.950 единиц; III передача – 1.357 единиц; IV передача – 0.941 единиц; V передача – 0.784 единиц; главная передача – 3.938 единиц; задняя передача – 3.500 единиц.
Роботизированная коробка передач АМТ серии ВАЗ 21827, устанавливаемая на хэтчбек Лада Х—Рей, обладает четырьмя рабочими режимами, каждый из которых имеет свое собственное обозначение: “N” — нейтраль, “R” – задняя передача (реверс), “A” – автоматический режим и “M” – мануальный режим.
При включении ручного режима водитель самостоятельно производит переключение передач с помощью качания селектора управления движениями вперед-назад, а автоматика берет на себя лишь функцию по выжиманию сцепления. Чтобы обезопасить трансмиссию от повреждений, в случае достижения слишком высоких оборотов, роботизированная коробка передач умеет самостоятельно менять передачу без участия водителя.
НАДЕЖНОСТЬ, ПЛЮСЫ И МИНУСЫ “РОБОТА” ЛАДА Х—РЕЙ СЕРИИ ВАЗ 21827
По большому счету, надежность и качество работы отечественной пяти диапазонной роботизированной трансмиссии АМТ заводской серии ВАЗ 21827, которой оснащается Лада Х—Рей, уступает классической пяти скоростной автоматической трансмиссии (5-АКПП). Вазовский “робот” менее оперативно реагирует на команду “кикдаун”, а также более ощутимо дергается и вибрирует в пробках. На удобстве использования также сказывается необходимость ставить автомобиль на стояночный тормоз в случае парковки машины на подъеме. Кроме того, по отзывам автовладельцев, отечественный “робот” имеет свойство внезапно перегреваться, уходить в ступор, при этом переставая реагировать на заданные команды, а также данная трансмиссия славится регулярными течами масла из сальников.
Вазовский “робот” менее оперативно реагирует на команду “кикдаун”, а также более ощутимо дергается и вибрирует в пробках. На удобстве использования также сказывается необходимость ставить автомобиль на стояночный тормоз в случае парковки машины на подъеме. Кроме того, по отзывам автовладельцев, отечественный “робот” имеет свойство внезапно перегреваться, уходить в ступор, при этом переставая реагировать на заданные команды, а также данная трансмиссия славится регулярными течами масла из сальников.
Тем не менее у отечественной 5-ти диапазонной роботизированной коробки передач АМТ серии ВАЗ 21827 имеются и свои плюсы. Во-первых, у рассматриваемого “робота” отсутствует шумовой фон и вибрации на селекторе трансмиссии. Во-вторых, у водителя отсутствует необходимость в прогреве, тогда как классический “автомат” необходимо прогревать перед началом движения (справочно: на “роботе” даже в при минусовой температуре можно ехать сразу же, без прогрева). В-третьих, отечественная роботизированная трансмиссия может без проблем буксировать автомобили и прицепы, при этом типовой “автомат” крайне боится езды в подобных режимах. В-четвертых, достоинством вазовской роботизированной трансмиссии является отсутствие надобности в техническом обслуживании, по крайней мере до 150 тысяч километров пробега. В-пятых, “робот” может похвастать наличием ручного режима, функции сброса передач и блокировки от ошибочного переключения. В-шестых, “робот” позволяет экономить топливо в городском цикле езды.
В-четвертых, достоинством вазовской роботизированной трансмиссии является отсутствие надобности в техническом обслуживании, по крайней мере до 150 тысяч километров пробега. В-пятых, “робот” может похвастать наличием ручного режима, функции сброса передач и блокировки от ошибочного переключения. В-шестых, “робот” позволяет экономить топливо в городском цикле езды.
По мнению независимых специалистов, все перечисленные выше достоинства пяти диапазонной роботизированной коробки переключения передач АМТ серии ВАЗ 21827, наряду с ее более низкой стоимостью по сравнению с другими типами автоматических трансмиссий, в полной мере оправдали решение компании АвтоВАЗ, относительно оптимизации затрат на производство Лада Х—Рей, благодаря чему цена на автомобиль стала более доступной для покупателя.
Стоит ли покупать Лада Х—Рей (Lada Xray) с мотором ВАЗ 21179 1.8 122 л. с и роботом АМТ ВАЗ 21827?
с и роботом АМТ ВАЗ 21827?В заключении отметим, что заявленный производителем, концерном АвтоВАЗ, предельный ресурс роботизированной 5-ти диапазонной коробки переключения передач АМТ заводской серии ВАЗ 21827 находится в пределах 200-220 тысяч километров пробега до наступления первых серьезных неполадок, с учетом своевременного технического обслуживания трансмиссии автовладельцем.
БЛАГОДАРИМ ВАС ЗА ВНИМАНИЕ! ПРОЯВЛЯЙТЕ ВЗАИМОУВАЖЕНИЕ НА ДОРОГАХ!
Какой рабочий ресурс у коробки-робота в «Гранте»? 🦈 avtoshark.com
Конструкция роботизированной коробки проще, чем автоматической с гидротрансформатором: себестоимость меньше. Поэтому АМТ стали активно устанавливать на недорогих моделях автомобилей.
Роботизированная коробка передач – некий компромиссный вариант между механикой и автоматом. На «Ладу Гранту» устанавливается РКПП ВАЗ-2182. АМТ (Automated Manual/Mechanical Transmission) оборудуются автомобили только с 16-клапанным двигателем. Сколько ходит робот на «Гранте», во многом зависит от манеры вождения.
Сколько ходит робот на «Гранте», во многом зависит от манеры вождения.
Отличия роботизированной коробки передач
В марте 2015 завод АвтоВАЗ начал производство автомобилей «Лада Гранта» с роботизированной коробкой передач. Этот же тип КПП устанавливается на моделях «Калина», «Веста», «Приора», XRAY.
Робот АМТ Лады Гранты
В основе конструкции вазовской АМТ – механическая КПП ВАЗ-2180 (ее оборудовали электромеханическими актуаторами концерна ZF). Принципиальных отличий немного:
- у АМТ за выжим сцепления отвечает электрический привод, ножная педаль отсутствует;
- сцеплением и переключением передач управляет электронный блок.
Корпус «робота» несколько отличается от МКПП из-за крепления приводов. Внутренний же механизм (подшипники, шестерни, синхронизаторы) у обоих типов коробок практически одинаков.
Благодаря адаптивной системе роботизированная коробка «запоминает» стиль вождения владельца и подстраивается под него.
Особенности конструкции
Робот на «Ладе Гранта» имеет штоковый привод сцепления, электромеханические приводы выбора передач и актуатор.
Работа системы контролируется электронным блоком управления (ЭБУ). Он связан с рычагом выбора режима и системой индикации.
Электронный блок управления
Конструкция роботизированной коробки проще, чем автоматической с гидротрансформатором: себестоимость меньше. Поэтому АМТ стали активно устанавливать на недорогих моделях автомобилей.
По мнению инженеров АвтоВАЗа, плюсами АМТ являются:
- простота в эксплуатации и техническом обслуживании;
- надежность;
- экономичность;
- невысокая стоимость ремонта.
Расход топлива автомобиля с роботизированной коробкой соотносим с показателями МКПП.
Среди недостатков владельцы «Лады Гранты» отмечают потерю тягового момента при переключении скоростей, а также посторонние звуки при работе коробки (гул и вой).
Нюансы эксплуатации
Управление автомобилем с АМТ имеет некоторые особенности. От умелого обращения с коробкой во многом зависит, сколько ходит робот на «Гранте». Система имеет несколько режимов:
От умелого обращения с коробкой во многом зависит, сколько ходит робот на «Гранте». Система имеет несколько режимов:
- Нейтральный (N) – машина катится, если не удерживать педаль тормоза.
- Автоматический (А) – скорости переключаются системой. На приборной панели отображается как AUTO.
- Ручной (М – MANUAL на приборной панели) – переключение выполняет водитель. Если будет достигнута очередная скорость, переключение произойдет автоматически.
- Задний ход (R).
Чтобы автомобиль завелся, нажимают педаль тормоза, переводят рычаг в нейтральное положение и поворачивают ключ зажигания. Затем выбирают нужный режим движения и при нажатии на педаль газа машина поедет. Любые движения селекторного рычага выполняются только при нажатой тормозной педали.
Для полной остановки глушат мотор при включенном режиме (A, M или R). Останавливаясь на светофоре, переходить на нейтральный режим не нужно.
АМТ подстраивается под характер вождения и выбирает нужную карту переключения. Однако переход на следующую передачу будет сделан только при минимально возможной для этого скорости. При переключении водители отмечают небольшой «провал» в динамике разгона – это особенность АМТ, где система выжимает сцепление и переключает скорости вместо водителя.
Однако переход на следующую передачу будет сделан только при минимально возможной для этого скорости. При переключении водители отмечают небольшой «провал» в динамике разгона – это особенность АМТ, где система выжимает сцепление и переключает скорости вместо водителя.
Рабочий ресурс робота в «Ладе Гранта»
В 2018 году выпущена обновленная версия Lada Granta с доработанной трансмиссией.
Lada Granta 2018 года
Робот получил несколько улучшений:
- Увеличено передаточное число главной пары – с 3,710 показатель поднялся до 3,940. Это позволило снизить шум и вибрацию, а также сделать набор скорости более динамичным.
- Добавлено несколько новых режимов работы – зимний, спортивный, «ползущий».
- Скорость переключения передач увеличилась примерно на 30%.
- В блоке сцепления заменен ведомый диск повышенной термостойкости.
- Увеличена толщина фрикционных накладок.
Благодаря этим изменениям езда стала более уверенной, а надежность робота «Лады Гранты» возросла.
Насколько надежна АМТ
Отвечая на вопрос, сколько ходит робот на «Гранте», важно учитывать, что коробка состоит из нескольких функциональных блоков. Каждый из них имеет свой срок эксплуатации, что и влияет на ресурс робота «Лады Гранты»:
- Примерный срок эксплуатации механических деталей коробки составляет 150 тыс. км. Некоторые автовладельцы отмечают, что механика остается в рабочем состоянии и после 300 тыс. км.
- Актуаторы от немецкой компании ZF служат около 10 лет, после чего их полностью заменяют. Ремонту этот блок не подлежит.
- Сцепление выдерживает до 100 тыс. км при умеренном режиме езды. При агрессивном характере вождения этот показатель может снизиться до 30 тыс. км.
Замена масла в коробке по инструкции проводится через 120 тыс. км. Однако специалисты сервисных служб рекомендуют менять его после 70 тыс. пробега.
Результаты тест-драйва
Тест-драйв «Лады Гранты» с АМТ показал, что робот больше всего подходит для спокойной размеренной езды. При переключении с 1-й скорости на 2-ю и со 2-й на 3-ю заметны «провалы».
При переключении с 1-й скорости на 2-ю и со 2-й на 3-ю заметны «провалы».
Чтобы уверенно маневрировать в потоке машин или обгонять на шоссе большие грузовики, необходимо слегка опустить газ, а затем выжать педаль до упора.
Тест-драйв «Лады Гранты» с АМТ
При остановке автомобиля коробка крайне медленно сбрасывает скорость. Это особенно неудобно, когда возникает необходимость влиться в поток с прилегающей территории. Из-за медленного сброса машина трогается на несколько секунд позже, чем необходимо. Важно учитывать эту особенность, чтобы не спровоцировать ДТП.
На извилистых дорогах с плохим покрытием машина ведет себя вполне уверенно. Переключение скоростей, хотя и чувствуется водителем, происходит плавно, без рывков.
По сравнению с механикой, машины с АМТ менее динамичны (даже модели с более мощным двигателем).
Возможные неисправности коробки-робота
Самые частые неисправности бывают 2 видов – механические и вызванные сбоем электроники. О возникшей поломке в роботизированной коробке Lada Granta говорят:
Читайте также: Самые частые проблемы коробки передач на автомобиле «Лада Гранта»
- световые индикаторы на панели приборов;
- вой или жужжание при движении;
- отсутствие реакции на увеличение оборотов – скорость не возрастает;
- протечка жидкости из коробки;
- прекращение работы агрегата и остановка машины.

Механические поломки вызваны износом или повреждением деталей. В этом случае требуется замена. Наиболее частые неисправности – износ вилки выбора передачи и подшипников качения.
Замена АМТ на Гранте
Среди поломок электронных узлов наиболее частые:
- выгорание контактов электроприводов – требует замены в сервисном центре;
- поломка приводов переключения;
- выгорание или загрязнение щеток электродвигателя, отвечающего за работу рычагов переключения.
Выход из строя блока управления проявляется пробуксовкой, рывками или ударами при переключении передач.
Вы можете использовать наши уникальные ФОТО, при указании активной ссылки — https://avtoshark.com/
коробка-роботлада грантаруководство по эксплуатациитест-драйвэксплуатация
0
Плюсы и минусы роботизированной коробки передач
На смену механическим коробкам передач приходят современные агрегаты, которые не требуют использования сцепления или рычага КПП. Рассмотрим, насколько надежны такие системы и есть ли у них минусы.
Рассмотрим, насколько надежны такие системы и есть ли у них минусы.
С 2015 года ВАЗ заявил, что автомобили серии Priora будут оснащаться роботизированными коробками передач, так же как и многие иномарки. Хоть подобное решение и по сей день не настолько популярно среди отечественных автовладельцев, многие уже оценили преимущества подобных систем. Вес такого «робота» составляет порядка 35 кг, а сам агрегат позволит эксплуатировать машину в более агрессивных условиях с меньшими проблемами. Например, РКПП позволяет запустить мотор при температуре порядка -40 градусов, тогда как автоматическая система (АКПП) справляется с этой задачей только до -25 градусов.
Однако не только эти преимущества требуют внимания. Сегодня производители предлагают намного больше вариантов более оптимальных технических решений. Тем не менее многие приверженцы коробок «автомат» и «механики» отмечают и негативные стороны роботизированных систем. Поэтому стоит подробнее разобраться в принципе работы таких РКПП, их плюсах и минусах.![]()
Что такое РКПП
По сути «робот» представляет собой стандартную механическую коробку передач, в которой отсутствует рычаг КПП и сцепление. Вместо этого в ней установлены сервоприводы (также их называют актуаторами). Благодаря им информация о движении авто (скорости и прочих показателях) преобразуется в цифровой формат, который активирует движение шестерней и валов. Один сервопривод отвечает за включение и отключение сцепления, а другой перемещает шестеренки в самой КПП. Таким образом, отпадает необходимость использования педали сцепления и ручного переключения передач, что значительно облегчает вождение авто.
Однако есть несколько разновидностей таких конструкций. РКПП может быть оснащена:
- Электроприводом. Такие коробки передач стоят дешевле и могут устанавливаться даже на самые бюджетные авто. В этом случае управление осуществляется за счет электромотора, редуктора и исполнительного механизма. Это приводит к более низкому быстродействию подобных систем.

- Гидравлической системой. В таких устройствах за переключение передач отвечают цилиндры, которые подталкиваются за счет силы электромагнитных клапанов. Гидравлические «роботы» больше похожи на классический «автомат». Передачи переключаются быстрее, чем в случае с обычным электроприводом. Кроме этого машина едет более плавно, без рывков. РКПП с гидравликой устанавливаются преимущественно на дорогие автомобили.
Так как, роботизированные КПП по своему принципу работы схожи с «коробками автоматами», у многих водителей возникает дилемма касательно того, какое устройство лучше выбрать. В этом вопросе многое зависит от условий эксплуатации и других факторов.
Преимущества и недостатки «автомата»
Если говорить о плюсах автоматических систем, то к ним можно отнести:
- Более легкое и простое управление.
- Пониженные нагрузки на двигатель (данное преимущество становится более явным, если сравнивать с МКПП, где для переключения скорости требуется большее количество оборотов мотора).
- Пониженные нагрузки на ходовую часть авто.
К минусам стоит отнести:
- Более высокий расход топлива.
- Плохую динамику разгона (если сравнивать с МКПП).
- Уменьшенное КПД.
- Больший расход масла.
- Медленное переключение передач.
- Риск скатывания авто, если машина находится на склоне.
Таким образом, «автомат» во многом лучше «механики», однако на пятки АКПП активно наступает роботизированная система.
Преимущества и недостатки «роботов»
Если говорить о плюсах более современных решений, то стоит выделить:
- Высокую экономичность (в этом плане РКПП не уступает «механике»).
- Низкое потребление масла и меньшие затраты на обслуживание и ремонт.
- Быстрое переключение передач.
- Меньший вес.
- Повышенную динамику.
- Большую надежность (так как современная РКПП изготовлена на основе проверенной временем МКПП, такие агрегаты служат дольше «автоматов»).
- Меньшее пространство, которое система занимает под капотом.

- Более низкую стоимость производства и ремонта.
- Меньший расход топлива.
К недостаткам стоит отнести:
- Слишком резкое переключение передач (водитель каждый раз ощущает небольшой рывок).
- Задержка при переключении передач во время движения задним ходом.
- Необходимость установки рычага в нейтральное положение при каждой остановке.
- Значительное понижение ресурса работы КПП каждый раз, когда происходит пробуксовка.
Данные минусы во многом зависят от модели «робота». Например, в некоторых дешевых моделях задержка между переключением передач может доходить до 2 секунд. Как правило, такие проблемы наблюдаются в устройствах, оснащенных электрическими переключателями. Кроме этого, от системы с электроприводом не приходится ждать адаптивной подстройки в зависимости от стиля вождения авто.
Если же установлена гидравлическая система, то скорость переключения ступеней увеличивается. Однако такие агрегаты не только стоят дороже, но и требуют постоянного удержания тормозной жидкости под давлением. Это приводит к общему понижению мощности самого двигателя. Поэтому рациональнее устанавливать такие системы в машинах «Премиум» класса или более мощных ТС.
Также скорость переключения КПП этого типа во многом зависит от ее разновидности в зависимости от того, сколько сцеплений установлено в «роботе». Например, первые роботы были оборудованы только одним сцеплением. Такие системы, как раз, и создают эффект кивающей головы водителя и пассажиров, из-за того, что машина начинает дергаться при переключении КПП. Однако, если речь идет о более современных преселективных моделях, в которых присутствует два сцепления, то в этом случае провалов тяги удается избежать.
Такие коробки называются DCT (Dual Clutch Transmission). Более современные версии называются DSG (Direct Schalt Getrieb). Они представляют собой шестиступенчатые КПП, разработанные Volkswagen. Благодаря наличию двух валов (один внутри другого) удается значительно сэкономить время переключения передач (не более 8 миллисекунд на реакцию системы) и избежать рывков. Сегодня такие системы встречаются во многих иномарках.
Однако и тут не обошлось без негативных нюансов. Дело в том, что даже если водитель приобретает преселективную модель, то в этом случае управление КПП осуществляется исключительно за счет электрики. Поэтому при езде в сложных условиях (когда ТС часто замедляется и разгоняется) появляется риск перегрева дисков сцепления. Кроме этого, преселективные системы пока что слишком дорогие в ремонте. Хоть механическая основа и отличается высокой надежностью, в случае проблем с прошивкой блока управления может произойти серьезный сбой.
Тем не менее РКПП постоянно совершенствуются. Например, те, кто предпочитает более агрессивную езду, могут приобрести «робот мокрого типа». В этом случае вероятность перегрева сцепления снижается.
В заключении
Исходя из всего вышесказанного становится очевидно, что роботизированные системы являются очень перспективным развитием. Такие КПП обладают большим количеством плюсов и помогают значительно сэкономить на эксплуатации авто. Однако все зависит от условий езды и мощности силового агрегата. Поэтому выбирать такие системы нужно очень внимательно.
Фестиваль «Ты здесь» (также известный как «Лабиринт») проходит в Secret Project Robot
Некоторые из вас могут помнить художественную инсталляцию «Лабиринт», которая осенью 2009 года сменила Death by Audio и в Chashama’s Visual Arts Space в 2009 году. Что ж, это снова, так как фестиваль You Are Here вернулся на месячную резиденцию в Secret Project Robot Gallery в Бушвике (ул. Мелроуз, 389) с 12 июля по 4 августа .
Как и в прошлые годы, фестиваль будет включать в себя «гигантский лабиринт в натуральную величину», а с четверга по субботу во время их пребывания в пространстве состоится сбор исполнителей. В стартовом матче четверга (12.07) участвуют Новый оптимизм Михо Хатори, ZS, Bachanalia, Энн Лив Янг и DJ JG Thirlwell различных воплощений плода. Другие исполнители в течение месяца включают Xeno и Oaklander , Hubble , Mick Barr , Dan Friel , ZS , VAZ , Dunes , Extra Life , Diald и многие многие. многое другое. Полное расписание «You are Here» приведено ниже, включая подробную информацию о художественных выставках в пространстве.
Фестиваль также готовит лимитированный микстейп, в который войдут неизвестные/редкие треки от многих исполнителей, запланированных на мероприятие. Получите копию на выставках и на сайте You Are Here, а также ознакомьтесь с «Hubble Potatoes» Хаббла, который появляется на указанном ниже сборнике.
В связанных новостях, как Diamond Terrifier , так и Hubble выступят в Zebulon сегодня вечером (7/10) , присоединившись к Excepter и Hagfish & Poet Lounge . Шоу является частью месячной резиденции, которую Diamond Terrifier (Сэм Хиллмер из Zs) проводит по вторникам в этом месте. В остальных шоу будет Патрик Хиггинс Электроакустический набор с Sleng Teng и Tetryl Red на 7/17 , ATM , с Psychic Reality и Chuck Bettis на 7/24 и The The Name Bettis 7/24 и The финальное шоу 31 июля с Talibam! , Violet Raid , Sun Watchers и GADDFJXR .
Шоу является частью месячной резиденции, которую Diamond Terrifier (Сэм Хиллмер из Zs) проводит по вторникам в этом месте. В остальных шоу будет Патрик Хиггинс Электроакустический набор с Sleng Teng и Tetryl Red на 7/17 , ATM , с Psychic Reality и Chuck Bettis на 7/24 и The The Name Bettis 7/24 и The финальное шоу 31 июля с Talibam! , Violet Raid , Sun Watchers и GADDFJXR .
Полная информация о фестивале ниже. В настоящее время группа ищет финансирование для берлинского издания в сентябре 2012 года, помогите, если можете.
Вы здесь, фестиваль 2012
Выступления в лабиринте
с 8:00 до конца
каждый четверг по пятницу, 12 июля, 4 августа 2012 г.
At Secret Project Robot
389 ST, Brooklyn NY
Четверг, 12 июля
Новый оптимизм Михо Хатори
ZS
Баханалия
Дж. Г. Терлуэлл (ди-джей)
Г. Терлуэлл (ди-джей)
Энн Лив Янг
Пятница, 13 июля
Лорел Коне 7 Ореол Лукки 50075 MV Carbon
DJ Chouette
Суббота, 14 июля
Mick Barr
Dan Friel
Lorna Dune
DAS Racist DJS
Четверг, июль
VAZ
. DJs
Пятница, 20 июля
Дастин Вонг
La Big Vic
Громкие предметы
Суббота, 21 июля
Телефонная бирка
Free Blood
WISH7 5 Иероглиф Тезаурус0003
Четверг, 26 июля
Джек Квартал
C. Spencer Yeh
Патрик Хиггинс
Jantar
Пятница, 27 июля
xeno и Oaklander
Guardian
Black Jeans
Uumans
Oracle Oracle DJ.
.
. 28
Амен Дюны
Кел Валхаал: Охотник Хант-Хендрикс
Даймонд Террификатор
Психическая реальность
Купольный театр
Расистские ди-джеи
Четверг, 2 августа
Дополнительная жизнь
Larkin Grimm
Ice Choir
Beige
Das Racist DJs
Friday, August 3rd
Artanker Convoy
Mas Ysa
Driphouse
Eric Wubbels
Saturday, August 4th
Nymph
Noveller
Black Crown Ceremony
GSOL
Купольный театр
Cool Places Sound Systems DJ
ГАЛЕРЕЯ ЧАСЫ В ЛАБИРИНТЕ
с 14:00 до 20:00
каждый четверг по пятницу, с 12 июля по 4 августа 2012 г.
в Secret Project Robot
389 Melrose St, Brooklyn NY
Nick Doyle (12 июля — 4 августа)
«Interface Accolade»
интерактивная скульптура, основанная на идеях интерфейса и реакционного опыта. Две его центральные консоли способствуют сплетению зрителя и пространства посредством его активации. Это отзывчивое произведение становится инструментом импровизации, с помощью которого участники могут испытать творение и трансформацию в пространстве. Перчаточные ящики с ручным управлением, освещение, последовательность.
Две его центральные консоли способствуют сплетению зрителя и пространства посредством его активации. Это отзывчивое произведение становится инструментом импровизации, с помощью которого участники могут испытать творение и трансформацию в пространстве. Перчаточные ящики с ручным управлением, освещение, последовательность.
G Lucas Crane + Party Lab (12 июля — 4 августа)
звукорежиссер, исполнитель и музыкант, чья работа сосредоточена на информационной тревоге, путанице в средствах массовой информации и переработанных технологиях. Используя комбинацию полевых записей, взятых из недр современного звукового медиа-ландшафта, и самодельных электронных инструментов, осцилляторов и сломанных машин, он создает композиции и перформансы как реакцию и иллюстрацию наших информационных обломков.
Babycastles (12 июля — 4 августа)
является составной частью ритма инди-дизайнеров, а также непрофессиональных геймдизайнеров из ближнего космоса. Babycastles прячет игры в сундуках с сокровищами вокруг лабиринта.
Сонные люди (12 июля — 4 августа)
Нейт Дорр и Майя Эдельман будут в прямом эфире манипулировать изображениями лабиринта с помощью 6 проекторов, установленных в галерее.
Водотоки (12 июля — 4 августа)
Прозвище художницы Пэм Гарнер, работающей здесь с жидкостью. Пэм будет оставлять зелья в секретных сосудах по всему лабиринту случайными ночами в случайных, но скрытых местах. Все зелья легко усваиваются, так что пейте!
Александр Перрелли (19 июля)
«Кабинет»
Аня Домлески и Александр Арройо (27 июля)
«Прививка»
наносит метки на ранее существовавшую структуру, перестраивая объем посредством новых векторов, составленных движением и восприятием.
Remote Control Tomato (28 июля)
Мультимедийный перформанс Томаса Белла, Кристина ДеРос и Аня Лифтиг
Morgan Silver-Greenberg (3-4 августа)
Скульптурные работы
Как получить доступ к вашим записям о прививках с помощью My Vax Records
Пропустить оглавление
Содержание
Вы пропустили раздел оглавления.
Шаг 1: перейдите в My Vax Records
Перейдите по адресу: myvaxrecords.mass.gov
Затем нажмите « Найдите мою запись о прививках », чтобы начать.
Шаг 2: Введите информацию
Чтобы найти вашу запись, системе требуется следующая информация:
- Имя
- Фамилия
- Мобильный телефон ИЛИ Электронная почта
- Дата рождения
- Пол
Примечание. Чтобы получить ссылку для доступа к вашей записи, вы должны иметь доступ к указанному мобильному телефону или электронной почте.
Затем установите флажок, чтобы указать, что вы не робот.
Наконец, после ввода информации и создания PIN-кода нажмите «Отправить».
Примечание. Информация в вашей записи MIIS получена от вашего поставщика медицинских услуг. Введите информацию, которую вы предоставили своему поставщику медицинских услуг, чтобы улучшить коэффициент соответствия.
Шаг 3: Ваш запрос получен
После успешной отправки запроса отображается страница подтверждения.
MIIS выполнит поиск введенной вами информации.
Если совпадений не найдено или вам нужно получить доступ к другой записи для иждивенца, вы можете повторить попытку с другой информацией, щелкнув ссылку Пожалуйста, заполните форму еще раз.
Шаг 4. Уведомления
Уведомления будут отправляться в текстовом сообщении или по электронной почте в зависимости от выбранного вами способа связи. Проверьте папку со спамом или нежелательной почтой, если вы не получили электронное письмо. Свяжитесь со своим оператором связи, если вы не получили текст.
Совпадение найдено
Если совпадение было найдено в MIIS, уведомление будет содержать ссылку для просмотра вашей записи. Нажмите на ссылку, чтобы получить доступ к своей записи.
Ссылка будет активна в течение 24 часов. Если вы не получите доступ к своей записи в течение этого времени, вам нужно будет повторно отправить новый запрос.
Если вы не получите доступ к своей записи в течение этого времени, вам нужно будет повторно отправить новый запрос.
Совпадение не найдено
Если совпадение не найдено в MIIS, в уведомлении будет ссылка для повторной попытки или перейдите в наш раздел справки, чтобы получить советы о том, как получить доступ к вашей записи.
Шаг 5. Получите доступ к своей записи
Чтобы подтвердить, что вы являетесь автором запроса, введите 4-значный PIN-код, который вы создали.
Затем нажмите «Отправить».
Шаг 6. Ваша медицинская карта MIIS COVID-19 SMART и медицинская карта
COVID-19 SMART Health Card
Ваша запись MIIS содержит COVID-19 SMART Health Card. Этот QR-код можно загрузить и сохранить на мобильное устройство, а также поделиться им, когда вы захотите поделиться доказательством своих прививок от COVID-19.
Чтобы загрузить карту SMART Health Card, нажмите кнопку
COVID-19 SMART Health Card.
- Apple Phone : В iOS 15 или более поздней версии вы можете отсканировать QR-код, чтобы загрузить информацию в приложение Health.
- Android-телефон : Вы можете сделать снимок экрана с полной историей вакцинации и медицинской картой SMART Health Card COVID-19 и сохранить его в фотопленку.
История прививок
Ваша запись в MIIS также содержит все другие полученные вами прививки, о которых сообщил в MIIS ваш лечащий врач. Нажмите «Распечатать все прививки», чтобы распечатать копию истории прививок.
Поиск и устранение неисправностей
Что делать, если моя запись не найдена?
Ваш поставщик вакцин отправляет вашу карту прививок в MIIS, но они могут предоставить неполную информацию. Так что, скорее всего, у нас есть ваша запись, но не правильная информация.
Например:
- Номер мобильного телефона или адрес электронной почты не указан или не соответствует
- Имя пишется по-другому
- Дата рождения не соответствует
Чтобы найти свою запись, попробуйте повторно ввести информацию с другим адресом электронной почты или номером мобильного телефона. Если ваша запись по-прежнему не найдена, обратитесь к своему поставщику медицинских услуг, чтобы обновить вашу запись о прививках, или запросите пересмотр вашей записи, отправив форму запроса записи о прививках. Вы будете уведомлены о наших выводах и действиях по исправлению в течение 2-3 недель.
Если ваша запись по-прежнему не найдена, обратитесь к своему поставщику медицинских услуг, чтобы обновить вашу запись о прививках, или запросите пересмотр вашей записи, отправив форму запроса записи о прививках. Вы будете уведомлены о наших выводах и действиях по исправлению в течение 2-3 недель.
Если вы получили прививку в федеральном агентстве (например, в Министерстве обороны, Службе здравоохранения индейцев или по делам ветеранов), вам необходимо обратиться в эти агентства за помощью в вашей карте вакцинации.
Что делать, если моя запись о прививках неверна?
Если информация в вашей карте вакцинации неверна (например, отсутствует доза, неправильные даты или неправильный бренд), вам может потребоваться исправить или обновить вашу карту вакцинации. Вы можете связаться со своим поставщиком медицинских услуг, чтобы обновить свою медицинскую карту или отправить электронную форму внесения поправок. Вы будете уведомлены о наших выводах и действиях по исправлению в течение 2-3 недель.
Мой лечащий врач обновил мою карту, но я по-прежнему не могу получить доступ к своей карте или не вижу обновлений в своей карте.
После того как поставщик услуг отправит обновление, оно появится в вашей карте в течение 24–48 часов. Если для ваших вакцин против COVID-19 будут внесены обновления, вам потребуется получить доступ к обновленной карте SMART Health Card через портал через 24–48 часов после того, как ваш поставщик медицинских услуг отправит обновление.
Как с нами связаться
Остались вопросы о доступе к вашим записям о прививках?
My Vax Records Часто задаваемые вопросы
Позвоните нам по телефону 2-1-1
Пн-Чт: с 8:30 до 18:00
Пт: с 8:30 до 17:00
Сб-Вс: 9 с 00:00 до 14:00
Пишите нам по адресу: [email protected]
Обратная связь
Спасибо, ваше сообщение отправлено в Управление здравоохранения и социальных служб!
Присоединиться к пользовательской панели gov, присоединяйтесь к нашей пользовательской панели, чтобы протестировать новые функции сайта.
gov, присоединяйтесь к нашей пользовательской панели, чтобы протестировать новые функции сайта.Надежная и валидная роботизированная оценка проприоцептивных, двигательных и сенсомоторных нарушений кисти после инсульта
1. Lambercy O, Ranzani R, Gassert R. Роботизированная реабилитация функции кисти. Реабилитационная робототехника. 2018. 10.1016/B978-0-12-811995-2.00027-8.
2. Юсиф Н., Коул Дж., Ротвелл Дж., Дидрихсен Дж. Проприоцепция в моторном обучении: уроки от деафферентного субъекта. Опыт Мозг Res. 2015;233(8):2449–2459. doi: 10.1007/s00221-015-4315-8. [PubMed] [CrossRef] [Академия Google]
3. Miall RC, Kitchen NM, Nam S-H, Lefumat H, Renault AG, Ørstavik K, Cole JD, Sarlegna FR. Проприоцептивная потеря и восприятие, контроль и обучение движениям рук у людей: свидетельство сенсорной нейропатии. Опыт Мозг Res. 2018; 236:2137–2155. doi: 10.1007/s00221-018-5289-0. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
4. Miall RC, Rosenthal O, Ørstavik K, Cole JD, Sarlegna FR. Потеря тактильной обратной связи ухудшает контроль положения рук: исследование у людей с хронической деафферентностью при захвате и подъеме предметов. Опыт Мозг Res. 2019;237(9):2167–2184. doi: 10.1007/s00221-019-05583-2. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Miall RC, Rosenthal O, Ørstavik K, Cole JD, Sarlegna FR. Потеря тактильной обратной связи ухудшает контроль положения рук: исследование у людей с хронической деафферентностью при захвате и подъеме предметов. Опыт Мозг Res. 2019;237(9):2167–2184. doi: 10.1007/s00221-019-05583-2. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
5. Proske U, Gandevia SC. Проприоцептивные чувства: их роль в передаче сигналов о форме тела, положении тела и движении, а также мышечной силе. Physiol Rev. 2012; 92: 1651–1697. doi: 10.1152/physrev.00048.2011. [PubMed] [CrossRef] [Google Scholar]
6. Ghez C, Gordon J, Ghilardi MF, Christakos CN, Cooper SE. Роль проприоцептивного входа в программирование траекторий рук. Cold Spring Harb Symp Quant Biol. 1990;55:837–847. doi: 10.1101/SQB.1990.055.01.079. [PubMed] [CrossRef] [Google Scholar]
7. Edwards LL, King EM, Buetefisch CM, Borich MR. Помещение «сенсорного» в сенсомоторный контроль: роль сенсомоторной интеграции в целенаправленных движениях рук после инсульта. Фронт Integr Neurosci. 2019;13:16. doi: 10.3389/fnint.2019.00016. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Фронт Integr Neurosci. 2019;13:16. doi: 10.3389/fnint.2019.00016. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
8. Wolpert DM, Goodbody SJ, Husain M. Поддержание внутренних представлений: роль верхней теменной доли человека. Нат Нейроски. 1998;1(6):529–533. дои: 10.1038/2245. [PubMed] [CrossRef] [Google Scholar]
9. Шварц А.Б. Движение: как мозг общается с миром. Клетка. 2016;164(6):1122–1135. doi: 10.1016/j.cell.2016.02.038. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
10. Ekstrand E, Rylander L, Lexell J, Brogårdh C. Воспринимаемая способность выполнять повседневные действия руками после инсульта и связанные с этим факторы: перекрестное исследование. БМК Нейрол. 2016;16(1):208. doi: 10.1186/s12883-016-0733-x. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
11. Johnson CO. Глобальное, региональное и национальное бремя инсульта, 1990–2016 гг.: систематический анализ для исследования глобального бремени болезней, 2016 г. Lancet Neurol. 2019;18(5):439–458. doi: 10.1016/S1474-4422(19)30034-1. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Lancet Neurol. 2019;18(5):439–458. doi: 10.1016/S1474-4422(19)30034-1. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
12. Schwarz A, Kanzler CM, Lambercy O, Luft AR, Veerbeek JM. Систематический обзор кинематических оценок движений верхних конечностей после инсульта. Инсульт. 2019;50(3):718–727. doi: 10.1161/STROKEAHA.118.023531. [PubMed] [CrossRef] [Академия Google]
13. Рагхаван П. Характер нарушения моторики рук после инсульта и его лечение. Варианты лечения Curr Cardiovasc Med. 2007;9(3):221–228. doi: 10.1007/s11936-007-0016-3. [PubMed] [CrossRef] [Google Scholar]
14. Сюй Дж., Хайт А.М., Кракауэр Дж.В.: Управление моторикой руки до и после инсульта. В: Неврология клинических систем, стр. 271–289. Токио: Спрингер; (2015). 10.1007/978-4-431-55037-2_14
15. Rathore SS, Hinn AR, Cooper LS, Tyroler HA, Rosamond WD. Характеристика признаков и симптомов инсульта, выявленных в результате исследования риска атеросклероза в сообществах. Инсульт. 2002;33(11):2718–2721. doi: 10.1161/01.STR.0000035286.87503.31. [PubMed] [CrossRef] [Академия Google]
2002;33(11):2718–2721. doi: 10.1161/01.STR.0000035286.87503.31. [PubMed] [CrossRef] [Академия Google]
16. Aqueveque P, Ortega P, Pino E, Saavedra F, Germany E, Gómez B. Двигательные нарушения после инсульта: обзор современных технологий реабилитации. физ инвалид. 2017 г.: 10.5772/67577. [CrossRef] [Google Scholar]
17. Коннелл Л.А., Линкольн Н.Б., Рэдфорд К.А. Соматосенсорные нарушения после инсульта: частота различных нарушений и их восстановление. Клиника реабилитации. 2008;22(8):758–767. doi: 10.1177/0269215508090674. [PubMed] [CrossRef] [Google Scholar]
18. Zandvliet SB, Kwakkel G, Nijland RHM, van Wegen EEH, Meskers CGM. Является ли восстановление соматосенсорных нарушений условием восстановления моторики верхних конечностей в ранние сроки после инсульта? Нейрореабилитация восстановления нервной системы. 2020;34(5):403–416. дои: 10.1177/1545968320907075. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
19. Kusoffsky A, Wadell I, Nilsson BY. Взаимосвязь между сенсорными нарушениями и двигательным восстановлением у больных с гемиплегией. Scand J Rehabil Med. 1982;14(1):27–32. [PubMed] [Google Scholar]
Взаимосвязь между сенсорными нарушениями и двигательным восстановлением у больных с гемиплегией. Scand J Rehabil Med. 1982;14(1):27–32. [PubMed] [Google Scholar]
20. Nudo RJ, Friel KM, Delia SW. Роль сенсорного дефицита в двигательных нарушениях после повреждения первичной моторной коры. Нейрофармакология. 2000;39(5):733–742. doi: 10.1016/S0028-3908(99)00254-3. [PubMed] [CrossRef] [Академия Google]
21. Meyer S, De Bruyn N, Lafosse C, Van Dijk M, Michielsen M, Thijs L, Truyens V, Oostra K, Krumlinde-Sundholm L, Peeters A, Thijs V, Feys H, Verheyden G. Соматосенсорные нарушения в постинсульт верхней конечности: распределение и связь с двигательной функцией и зрительно-пространственным игнорированием. Нейрореабилитация Нейроремонт. 2016;30(8):731–742. doi: 10.1177/1545968315624779. [PubMed] [CrossRef] [Google Scholar]
22. Kenzie JM, Semrau JA, Hill MD, Scott SH, Dukelow SP. Комплексное роботизированное измерение проприоцепции верхних конечностей. J NeuroEng Rehabil. 2017 г.: 10.1186/s12984-017-0329-8. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
2017 г.: 10.1186/s12984-017-0329-8. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
23. Gladstone DJ, Danells CJ, Black SE. Оценка восстановления моторики после инсульта по Фуглю-Мейеру: критический обзор его измерительных свойств. Нейрореабилитация Нейроремонт. 2002;16(3):232–240. doi: 10.1177/154596802401105171. [PubMed] [CrossRef] [Google Scholar]
24. Линкольн Н.Б., Кроу Дж.Л., Джексон Дж.М., Уотерс Г.Р., Адамс С.А., Ходжсон П. Ненадежность сенсорных оценок. Клиника реабилитации. 1991;5(4):273–282. дои: 10.1177/026921559100500403. [CrossRef] [Google Scholar]
25. Valdes K, Naughton N, Algar L. Сенсомоторные вмешательства и оценки для кисти и запястья: предварительный обзор. Дж. Хэнд Тер. 2014; 27: 272–286. doi: 10.1016/j.jht.2014.07.002. [PubMed] [CrossRef] [Google Scholar]
26. Пайк С., Ланнин Н.А., Уэльс К., Кьюсик А. Систематический обзор психометрических свойств теста руки исследования действий в нейрореабилитации. Aust Occup Ther J. 2018;65(5):449–471. doi: 10.1111/1440-1630.12527. [PubMed] [CrossRef] [Академия Google]
2018;65(5):449–471. doi: 10.1111/1440-1630.12527. [PubMed] [CrossRef] [Академия Google]
27. Матиовец В., Вебер К. Нормы для взрослых для теста ловкости рук на ящик и блок. Am J Оккупировать Ther. 1985;39(6):387–91. 10.5014/аджот.39.6.386. [PubMed]
28. Lang CE, Bland MD, Bailey RR, Schaefer SY, Birkenmeier RL. Оценка нарушений, функций и активности верхних конечностей после инсульта: основы для принятия клинических решений. Дж. Хэнд Тер. 2013;26(2):104–115. doi: 10.1016/j.jht.2012.06.005. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
29. Scott SH, Dukelow SP. Потенциал роботов как технологии следующего поколения для клинической оценки неврологических расстройств и терапии верхних конечностей. J Rehabil Res Dev. 2011;48(4):335. doi: 10.1682/JRRD.2010.04.0057. [PubMed] [CrossRef] [Академия Google]
30. Ламберси О., Роблес А.Дж., Ким Ю., Гассерт Р.: Разработка роботизированного устройства для оценки и восстановления сенсорной функции руки. В: Международная конференция IEEE по реабилитационной робототехнике, 2011 г. , стр. 1–6 (2011 г.). 10.1109/ICORR.2011.5975436 [PubMed]
, стр. 1–6 (2011 г.). 10.1109/ICORR.2011.5975436 [PubMed]
31. Плантин Дж., Пеннати Г.В., Рока П., Барон Дж.К., Лауренсикас Э., Вебер К., Годболт А.К., Борг Дж., Линдберг П.Г. Количественная оценка спастичности рук после инсульта: визуализация коррелирует и влияет на восстановление моторики. Фронт Нейрол. 2019;10:836. doi: 10.3389/fneur.2019.00836. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
32. Dukelow SP, Herter TM, Moore KD, Demers MJ, Glasgow JI, Bagg SD, Norman KE, Scott SH. Количественная оценка ощущения положения конечности после инсульта. Нейрореабилитация Нейроремонт. 2010;24(2):178–187. doi: 10.1177/1545968309345267. [PubMed] [CrossRef] [Google Scholar]
33. Semrau JA, Herter TM, Scott SH, Dukelow SP. Изучение различий в моделях сенсорного и моторного восстановления после инсульта с помощью робототехники. Инсульт. 2015;46(12):3459–3469. doi: 10.1161/STROKEAHA.115.010750. [PubMed] [CrossRef] [Google Scholar]
34. Ingemanson ML, Rowe JB, Chan V, Wolbrecht ET, Cramer SC, Reinkensmeyer DJ. Использование роботизированного устройства для измерения возрастного снижения проприоцепции пальцев. Опыт Мозг Res. 2016;234(1):83–93. doi: 10.1007/s00221-015-4440-4. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Использование роботизированного устройства для измерения возрастного снижения проприоцепции пальцев. Опыт Мозг Res. 2016;234(1):83–93. doi: 10.1007/s00221-015-4440-4. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
35. Ingemanson ML, Rowe JR, Chan V, Riley J, Wolbrecht ET, Reinkensmeyer DJ, Cramer SC. Нейронные корреляты чувства пассивного положения пальцев после инсульта. Нейрореабилитация Нейроремонт. 2019;33(9):740–750. doi: 10.1177/1545968319862556. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
36. Rinderknecht MD, Lambercy O, Raible V, Büsching I, Sehle A, Liepert J, Gassert R. Надежность, валидность и клиническая осуществимость быстрого и объективная оценка постинсультных нарушений проприоцепции рук. J NeuroEng Rehabil. 2018;15:47. doi: 10.1186/s12984-018-0387-6. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
37. Contu, S., Basteris, A., Plunkett, T.K., Kuah, C.W.K., Chua, K.S., Campolo, D., Masia, L. : Проприоцепция запястья при остром и подостром инсульте: роботизированный протокол для пациентов с тяжелыми нарушениями. В: 7-я Международная конференция IEEE по биомедицинской робототехнике и биомехатронике (Biorob), 2018 г., стр. 19.–24 (2018). 10.1109/BIOROB.2018.8488083
В: 7-я Международная конференция IEEE по биомедицинской робототехнике и биомехатронике (Biorob), 2018 г., стр. 19.–24 (2018). 10.1109/BIOROB.2018.8488083
38. Lexell JE, Downham DY. Как оценить достоверность измерений в реабилитации. Am J Phys Med Rehabil. 2005;84(9):719–723. doi: 10.1097/01.phm.0000176452.17771.20. [PubMed] [CrossRef] [Google Scholar]
39. Kanzler CM, Rinderknecht MD, Schwarz A, Lamers I, Gagnon C, Held JPO, Feys P, Luft AR, Gassert R, Lambercy O. Управляемая данными структура для выбор и проверка цифровых показателей здоровья: пример использования при неврологических сенсомоторных нарушениях. NPJ Digital Med. 2020 г.: 10.1038/s41746-020-0286-7. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
40. Широта С., Баласубраманян С., Мелендес-Кальдерон А. Оценка сенсомоторной функции с помощью технологий: текущее использование, препятствия и будущие направления с точки зрения различных заинтересованных сторон. J NeuroEng Rehabil. 2019;16(1):53. doi: 10.1186/s12984-019-0519-7. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
doi: 10.1186/s12984-019-0519-7. [PMC free article] [PubMed] [CrossRef] [Google Scholar]
41. Збытневская М., Риндеркнехт М.Д., Ламберси О., Барноби М., Раатс Дж., Ламерс И., Фейс, П., Липерт Дж., Гассерт Р.: Дизайн и характеристика роботизированного устройства для оценки проприоцептивных, двигательных и сенсомоторных нарушений рук. В: 201916-я Международная конференция IEEE по реабилитационной робототехнике (ICORR), стр. 441–446 (2019). 10.1109/ICORR.2019.8779507 [PubMed]
42. Збытневская М., Зигенталер М., Канцлер С.М., Хермсдорфер Дж., Гассерт Р., Ламберси О.: Проектирование и предварительная оценка роботизированная оценка сенсомоторных нарушений рук. В: 8-я Международная конференция IEEE RAS/EMBS по биомедицинской робототехнике и биомехатронике (BioRob), 2020 г., стр. 721–726 (2020). 10.1109/БиоРоб49111.2020.9224412
43. Доллар, А.М.: Классификация использования рук человека и повседневной деятельности, стр. 201–216. Спрингер (2014). 10.1007/978-3-319-03017-3_10
44. Смания Н., Паолуччи С., Тинацци М., Боргеро А., Манганотти П., Фиаски А., Моретто Г., Бови П., Гамбарин М. Активное разгибание пальцев. Инсульт. 2007;38(3):1088–1090. doi: 10.1161/01.STR.0000258077.88064.a3. [PubMed] [CrossRef] [Google Scholar]
Смания Н., Паолуччи С., Тинацци М., Боргеро А., Манганотти П., Фиаски А., Моретто Г., Бови П., Гамбарин М. Активное разгибание пальцев. Инсульт. 2007;38(3):1088–1090. doi: 10.1161/01.STR.0000258077.88064.a3. [PubMed] [CrossRef] [Google Scholar]
45. Winters C, Kwakkel G, Nijland R, van Wegen E. Когда после инсульта происходит восстановление произвольного разгибания пальцев? Проспективное когортное исследование. ПЛОС ОДИН. 2016;11(8):0160528. doi: 10.1371/journal.pone.0160528. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
46. Кэри Л.М., Оке Л.Е., Матиас Т.А. Нарушение чувства положения конечностей после инсульта: количественный тест для клинического применения. Arch Phys Med Rehabil. 1996;77(12):1271–1278. doi: 10.1016/S0003-9993(96)
-6. [PubMed] [CrossRef] [Google Scholar] 47. Rinderknecht MD, Popp WL, Lambercy O, Gassert R. Надежная и быстрая роботизированная оценка проприоцепции запястья с использованием парадигмы соответствия положения датчика. Фронт Человеческих Неврологов. 2016;10:316. doi: 10.3389/fnhum.2016.00316. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Фронт Человеческих Неврологов. 2016;10:316. doi: 10.3389/fnhum.2016.00316. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
48. Симо Л., Ботцер Л., Гез С., Шейдт Р.А. Роботизированный тест проприоцепции в гемипаретической руке после инсульта. J NeuroEng Rehabil. 2014;11(1):77. дои: 10.1186/1743-0003-11-77. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
49. Collins KC, Kennedy NC, Clark A, Pomeroy VM. Кинематические компоненты движения к цели после инсульта для целенаправленных реабилитационных вмешательств: систематический обзор и метаанализ. Фронт Нейрол. 2018;9:472. doi: 10.3389/fneur.2018.00472. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
50. Coderre AM, Amr AZ, Dukelow SP, Demmer MJ, Moore KD, Demers MJ, Bretzke H, Herter TM, Glasgow JI, Norman KE, Bagg SD, Scott SH. Оценка сенсомоторной функции верхних конечностей у пациентов с подострым инсультом с помощью зрительного контроля. Нейрореабилитация Нейроремонт. 2010;24(6):528–541. doi: 10.1177/1545968309356091. [PubMed] [CrossRef] [Google Scholar]
doi: 10.1177/1545968309356091. [PubMed] [CrossRef] [Google Scholar]
51. Semrau JA, Herter TM, Kenzie JM, Findlater SE, Scott SH, Dukelow SP. Роботизированная характеристика ипсилезиональной двигательной функции при подостром инсульте. Нейрореабилитация Нейроремонт. 2017 г.: 10.1177/1545968317704903. [PubMed] [CrossRef] [Google Scholar]
52. Koeppel T, Pila O. Проверка надежности кинематических оценок для роботизированной реабилитации верхних конечностей. IEEE Trans Neural Syst Rehabilitation Eng. 2020;28(9):2035–2042. doi: 10.1109/TNSRE.2020.3013705. [PubMed] [CrossRef] [Google Scholar]
53. Hayashi H, Shimizu H, Okumura S, Miwa K. Необходимый диапазон движений пястно-фаланговых суставов для поддержания функции руки. Гонконг J Occup Ther. 2014; 24:51–55. doi: 10.1016/j.hkjot.2014.10.001. [Перекрестная ссылка] [Академия Google]
54. Биби Дж. А., Ланг К. Э. Активный диапазон движений предсказывает функцию верхних конечностей через 3 месяца после инсульта.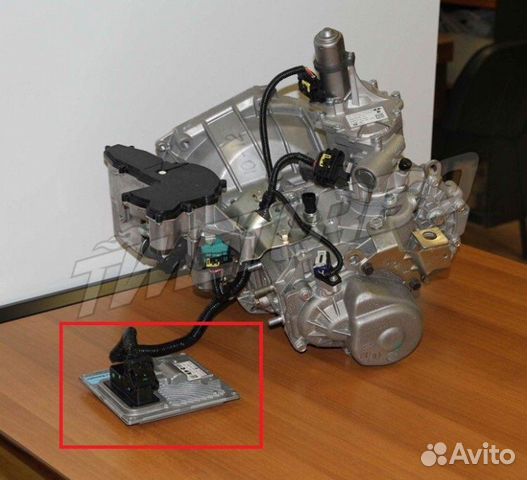 Инсульт. 2009;40(5):1772–1779. doi: 10.1161/STROKEAHA.108.536763. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
Инсульт. 2009;40(5):1772–1779. doi: 10.1161/STROKEAHA.108.536763. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
55. Chen H-M, Chen CC, Hsueh I-P, Huang S-L, Hsieh C-L. Воспроизводимость повторных тестов и наименьшая реальная разница 5 тестов функции рук у пациентов с инсультом. Нейрореабилитация Нейроремонт. 2009; 23: 435–440. doi: 10.1177/1545968308331146. [PubMed] [CrossRef] [Академия Google]
56. Линдберг П.Г., Рош Н., Робертсон Дж., Роби-Брами А., Бассел Б., Майер М.А. Нарушенные и неизмененные количественные аспекты контроля силы захвата у пациентов с гемипаретией после инсульта. Мозг Res. 2012;1452:96–107. doi: 10.1016/j.brainres.2012.03.007. [PubMed] [CrossRef] [Google Scholar]
57. Ao D, Song R, Tong KY. Сенсомоторный контроль за движениями с разной скоростью у пациентов, перенесших инсульт, а также у сверстников и молодых здоровых людей. ПЛОС ОДИН. 2015 г.: 10.1371/journal.pone.0128328. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
58. Hu XL, Tong KY, Song R, Zheng XJ, Lui KH, Leung WWF, Ng S, Au-Yeung SSY. Количественная оценка процесса восстановления двигательных функций у больных с хроническим инсультом при роботизированной тренировке запястья. J Электромиография Кинезиол. 2009;19(4):639–650. doi: 10.1016/J.JELEKIN.2008.04.002. [PubMed] [CrossRef] [Google Scholar]
Hu XL, Tong KY, Song R, Zheng XJ, Lui KH, Leung WWF, Ng S, Au-Yeung SSY. Количественная оценка процесса восстановления двигательных функций у больных с хроническим инсультом при роботизированной тренировке запястья. J Электромиография Кинезиол. 2009;19(4):639–650. doi: 10.1016/J.JELEKIN.2008.04.002. [PubMed] [CrossRef] [Google Scholar]
59. Colombo R, Pisano F, Micera S, Mazzone A, Delconte C, Carrozza MC, Dario P, Minuco G. Оценка механизмов восстановления во время роботизированной нейрореабилитации верхней конечность Нейрореабилитация Нейроремонт. 2008;22(1):50–63. дои: 10.1177/1545968307303401. [PubMed] [CrossRef] [Google Scholar]
60. Линкольн Н.Б., Джексон Дж., Адамс С. Надежность и пересмотр ноттингемской сенсорной оценки пациентов с инсультом Надежность и пересмотр ноттингемской сенсорной оценки пациентов с инсультом. Физиотерапия. 1998;84(8):358–365. doi: 10.1016/S0031-9406(05)61454-X. [CrossRef] [Google Scholar]
61. Столк-Хорнсвельд, Ф., Кроу, Дж. Л., Хендрикс, Е.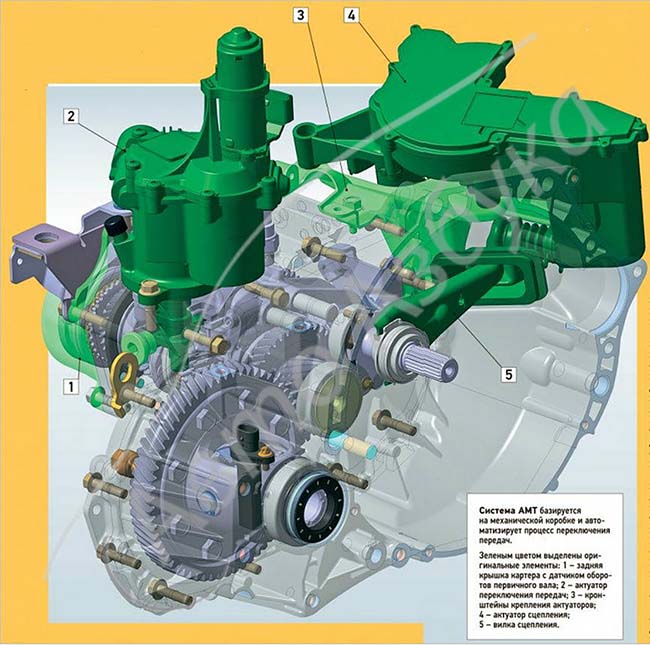 П., ван дер Баан, Р., Хармелинг-ван дер Вел, Б. К.: Модификации Erasmus MC к (пересмотренному) ноттингемская сенсорная оценка: надежная мера соматосенсорной оценки для пациентов с внутричерепными нарушениями. Clin Rehabil 20 (2), 160–172 (2006). 10.1191/0269215506cr932oa [PubMed]
П., ван дер Баан, Р., Хармелинг-ван дер Вел, Б. К.: Модификации Erasmus MC к (пересмотренному) ноттингемская сенсорная оценка: надежная мера соматосенсорной оценки для пациентов с внутричерепными нарушениями. Clin Rehabil 20 (2), 160–172 (2006). 10.1191/0269215506cr932oa [PubMed]
62. Насреддин З.С., Филлипс Н.А., Бедириан В., Шарбонно С., Уайтхед В., Коллин И., Каммингс Дж.Л., Чертков Х. Монреальский когнитивный тест, MoCA: краткий инструмент скрининга легких когнитивных нарушений. ЯГС. 2005;53(4):695–699. doi: 10.1111/j.1532-5415.2005.53221.x. [PubMed] [CrossRef] [Google Scholar]
63. Gregson JM, Leathley M, Moore AP, Sharma AK, Smith TL, Watkins CL. Надежность шкалы оценки тонуса и модифицированной шкалы Эшворта как клинических инструментов оценки постинсультной спастичности. Arch Phy Med Rehabil. 1999;80(9):1013–1016. doi: 10.1016/S0003-9993(99)-9. [PubMed] [CrossRef] [Google Scholar]
64. Рой К., Дас Р.Н., Амбуре П., Ахер Р.Б. Помните об ошибках. Дальнейшие исследования по проверке прогностических моделей QSAR. Хемометр Intell Lab Syst. 2016; 152:18–33. doi: 10.1016/j.chemolab.2016.01.008. [CrossRef] [Google Scholar]
Хемометр Intell Lab Syst. 2016; 152:18–33. doi: 10.1016/j.chemolab.2016.01.008. [CrossRef] [Google Scholar]
65. Ваз С., Фолкмер Т., Пассмор А. Е., Парсонс Р., Андреу П. Случай использования коэффициента повторяемости при расчете надежности повторных испытаний. ПЛОС ОДИН. 2013;8(9): 1–7. doi: 10.1371/journal.pone.0073990. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
66. Koo TK, Li MY. Руководство по выбору и представлению внутриклассовых коэффициентов корреляции для исследования надежности. J Chiropr Med. 2016;15(2):155–163. doi: 10.1016/j.jcm.2016.02.012. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
67. Prinsen CAC, Mokkink LB, Bouter LM, Alonso J, Patrick DL, de Vet HCW, Terwee CB. Руководство COSMIN для систематических обзоров исходов, сообщаемых пациентами. Качество жизни Res. 2018;27(5):1147–1157. doi: 10.1007/s11136-018-1798-3. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
68. Beckerman H, Roebroeck ME, Lankhorst GJ, Becher JG, Bezemer PD, Verbeek ALM. Наименьшая реальная разница, связь между воспроизводимостью и отзывчивостью. Качество жизни Res. 2001;10(7):571–578. doi: 10.1023/A:1013138911638. [PubMed] [CrossRef] [Google Scholar]
Наименьшая реальная разница, связь между воспроизводимостью и отзывчивостью. Качество жизни Res. 2001;10(7):571–578. doi: 10.1023/A:1013138911638. [PubMed] [CrossRef] [Google Scholar]
69. Martin Bland J, Altman D. Статистические методы оценки соответствия между двумя методами клинических измерений. Ланцет. 1986;327(8476):307–310. дои: 10.1016/S0140-6736(86)90837-8. [PubMed] [CrossRef] [Google Scholar]
70. Schober P, Boer C, Schwarte LA. Коэффициенты корреляции. Анест Анальг. 2018;126(5):1763–1768. doi: 10.1213/ANE.0000000000002864. [PubMed] [CrossRef] [Google Scholar]
71. Meyer S, De Bruyn N, Krumlinde-Sundholm L, Peeters A, Feys H, Thijs V, Verheyden G. Связь между сенсомоторными нарушениями в верхней конечности через 1 неделю и 6 месяцев после инсульта. J Neurol Phys Ther. 2016;40(3):186–195. doi: 10.1097/NPT.0000000000000138. [PubMed] [CrossRef] [Академия Google]
72. Чой С-О, Миувсен Х.Дж., Арнхольд Р.В. О психофизике позиционных движений рук. Перцепт Мот Ски. 1995 г.: 10.2466/pms.1995.80.3c.1163. [PubMed] [CrossRef] [Google Scholar]
1995 г.: 10.2466/pms.1995.80.3c.1163. [PubMed] [CrossRef] [Google Scholar]
73. Дьюпсйобака М., Домкин Д. Корреляционный анализ проприоцептивной остроты при сопоставлении ипсилатерального положения и различении скорости. Соматосенс Мот Рез. 2005;22(1–2):85–93. doi: 10.1080/089
500083711. [PubMed] [CrossRef] [Google Scholar]
74. Simmatis LER, Early S, Moore KD, Appaqaq S, Scott SH. Статистические измерения двигательных, сенсорных и когнитивных функций при повторном тестировании с использованием роботов. J NeuroEng Rehabil. 2020;17(1):86. дои: 10.1186/с12984-020-00713-2. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
75. Манг С.С., Уиттен Т.А., Кош М.С., Скотт С.Х., Уайли Дж.П., Деберт С.Т., Дьюклоу С.П., Бенсон Б.В. Тест-ретестовая надежность конечного робота KINARM для оценки сенсорной, моторной и нейрокогнитивной функции у молодых взрослых спортсменов. ПЛОС ОДИН. 2018;13(4):0196205. doi: 10.1371/journal.pone.0196205. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
76. Kanzler CM, Schwarz A, Held JPO, Luft AR, Gassert R, Lambercy O. Технологическая оценка функционально значимых сенсомоторных нарушений в руке и кисти лиц, перенесших инсульт. J NeuroEng Rehabil. 2020;17(1):128. дои: 10.1186/с12984-020-00748-5. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
77. Hsueh I-P, Hsu M-J, Sheu C-F, Lee S, Hsieh C-L, Lin J-H. Психометрические сравнения 2 версий моторной шкалы Фугля-Мейера и 2 версий реабилитационной оценки движений после инсульта. Нейрореабилитация Нейроремонт. 2008;22(6):737–744. doi: 10.1177/1545968308315999. [PubMed] [CrossRef] [Google Scholar]
78. Ingemanson ML, Rowe JR, Chan V, Wolbrecht ET, Reinkensmeyer DJ, Cramer SC. Целостность соматосенсорной системы объясняет различия в реакции на лечение после инсульта. Неврология. 2019;92(10):1098–1108. doi: 10.1212/WNL.0000000000007041. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
79. Сон С.М., Квон Ю.Х., Ли Н.К., Нам С.Х., Ким К. Дефицит точности движений и проприоцептивного чувства в ипси-поврежденной верхней конечности пациентов с гемипаретическим инсультом. J Phys Ther Sci. 2013;25(5):567–9. doi: 10.1589/jpts.25.567. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
80. Симидзу Т., Хосаки А., Хино Т., Сато М., Комори Т., Хираи С., Россини П.М. Двигательная корковая расторможенность в непораженном полушарии после одностороннего коркового инсульта. Мозг. 2002;125(8):1896–1907. doi: 10.1093/мозг/awf183. [PubMed] [CrossRef] [Google Scholar]
81. Cruz EG, Waldinger HC, Kamper DG. Кинетические и кинематические рабочие пространства указательного пальца после удара. Мозг. 2005; 128:1112–1121. doi: 10.1093/мозг/awh532. [PubMed] [CrossRef] [Google Scholar]
82. Теремец М., Колле Ф., Хамдун С., Майер М.А., Линдберг П.Г. Новый метод количественной оценки ключевых компонентов ловкости рук после инсульта. J NeuroEngi Rehabil. 2015 г.: 10.1186/s12984-015-0054-0. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
83. Кваккель Г., Коллен Б.Дж., Ван дер Гронд Дж.В., Прево А.Дж.Х. Вероятность восстановления подвижности вялой верхней конечности: влияние тяжести пареза и времени, прошедшего с начала острого инсульта. Инсульт. 2003;34(9):2181–2186. doi: 10.1161/01.STR.0000087172.16305.CD. [PubMed] [CrossRef] [Google Scholar]
84. Zeman BD, Yiannikas C. Функциональный прогноз при инсульте: использование соматосенсорных вызванных потенциалов. J Neurol Нейрохирург Психиатрия. 1989;52(2):242–247. doi: 10.1136/jnnp.52.2.242. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
85. Prablanc C, Martin O. Автоматическое управление при дотягивании руки при необнаруженных двумерных смещениях цели. J Нейрофизиол. 1992;67(2):455–469. doi: 10.1152/jn.1992.67.2.455. [PubMed] [CrossRef] [Google Scholar]
86. Sarlegna FR, Mutha PK. Влияние визуальной целевой информации на онлайн-управление движениями. Вис Рез. 2015; 110:144–154. doi: 10.1016/J.VISRES.2014.07.001. [PubMed] [CrossRef] [Google Scholar]
87. Thickbroom GW, Byrnes ML, Archer SA, Mataglia FL. Двигательный исход после подкоркового инсульта: МВП коррелируют с силой рук, но не с ловкостью. Клин Нейрофизиол. 2002;113(12):2025–2029 гг. . doi: 10.1016/S1388-2457(02)00318-8. [PubMed] [CrossRef] [Google Scholar]
88. Fuentes CT, Bastian AJ. Где твоя рука? Изменения проприоцепции в пространстве и задачах. J Нейрофизиол. 2010;103(1):164–171. doi: 10.1152/jn.00494.2009. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
89. Марини Ф., Феррантино М., Зенцери Дж. Проприоцептивная идентификация положения сустава в сравнении с воспроизведением кинестетического движения. Hum Mov Sci. 2018; 62:1–13. doi: 10.1016/j.humov.2018.08.006. [PubMed] [CrossRef] [Академия Google]
90. Грешем Г.Э., Дункан П.В., Стасон В.Б. Постинсультная реабилитация: оценка, направление и ведение пациентов. Темы Реабилитация после инсульта. 1996;3(2):1–26. doi: 10.1080/10749357.1996.11754112. [PubMed] [CrossRef] [Google Scholar]
91. Bain GI, Polites N, Higgs BG, Heptinstall RJ, McGrath AM. Функциональный диапазон движений суставов пальцев. J Hand Surg. 2015;40(4):406–411. doi: 10.1177/1753193414533754. [PubMed] [CrossRef] [Google Scholar]
92.