Роботизированная трансмиссия (РКПП) и принцип работы коробки
РКПП — роботизированная коробка передач (коробка «робот), которая позволяет выбирать и включать необходимую передачу без участия водителя, то есть автоматически. При этом ошибочно полагать, что роботизированная трансмиссия является одной из разновидностей АКПП (гидромеханический автомат).
Прежде всего, чтобы понять, что такое роботизированная коробка передач, для начала необходимо вспомнить устройство и принцип работы обычной механической коробки (МКПП). Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Содержание статьи
- Устройство, особенности и принцип работы роботизированной коробки передач
- Как работает роботизированная коробка передач
- Преимущества и недостатки коробки — робот
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т.д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями. Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы. Электрический актуатор -электромотор с редуктором, гидравлический является гидроцилиндром, шток которого связан с синхронизатором. Главной задачей как первого, так и второго типа устройств становится механическое перемещение синхронизаторов КПП, а также включение и выключение сцепления.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т. д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
Как работает роботизированная коробка передач
Что касается принципов работы РКПП, для начала движения и дальнейшего плавного переключения передач необходимо задействовать сцепление (как и в МКПП). Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
В коробке с двумя сцеплениями сначала включается первое сцепление внутреннего первичного вала. Далее актуатор выбора и включения передачи подводит синхронизатор к шестерне первой передачи. В результате шестерня блокируется на валу и начинает вращаться вторичный вал.
После того, как автомобиль начал движение, водитель продолжает нажимать на педаль газа для разгона. В однодисковых роботах с одним сцеплением для включения второй передачи требуется некоторое время, в результате чего возникает характерный «провал».
Чтобы избавиться от такой задержки и сократить время переключений в конструкцию коробки добавили второе сцепление и еще один вал.![]() В результате появилась так называемая преселективная роботизированная КПП.
В результате появилась так называемая преселективная роботизированная КПП.
Если просто, пока включена первая передача, вторая уже также готова к включению, так как одновременно задействовано второе сцепление. Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Подобным образом происходит переключение на последующие высшие передачи, а также понижение передач при езде. При этом время переключения минимально и занимает доли секунды, исключены перегазовки, практически отсутствует разрыв тяги и т.д. Результат — динамичная езда и максимальная топливная экономичность.
Работа в автоматическом режиме становится возможной благодаря тому, что ЭБУ коробкой постоянно анализирует сигналы с внешних датчиков. Блок учитывает нагрузку на ДВС, скорость движения ТС, положение педали газа, пробуксовку колес и т.д.
Также РКПП имеют возможность ручного переключения передач, имитируя работу гидромеханической АКПП в ручном режиме (например, Типтроник). Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Простыми словами, водитель при помощи селектора выбирает режим, при котором ЭБУ коробкой не будет инициировать включение, например, 3 передачи и выше, что помогает преодолевать сложные участки пути (снег, гололед, грязь и т.д.).
Преимущества и недостатки коробки — робот
Сегодня коробка-робот является достаточно распространенным решением. Например, концерн VAG активно устанавливает подобные коробки, которые знакомы потребителям, как DSG, на разные модели Audi, Volkswagen, Porsche, Skoda и т.д. Также роботизированную трансмиссию массово ставят на модели Ford, Mitsubishi, Honda и машины целого ряда других мировых производителей.
На первый взгляд может показаться, что РКПП имеет только плюсы: надежность и ремонтопригодность «механики», быстрота переключений, топливная экономичность, возможность выдерживать большой крутящий момент и т.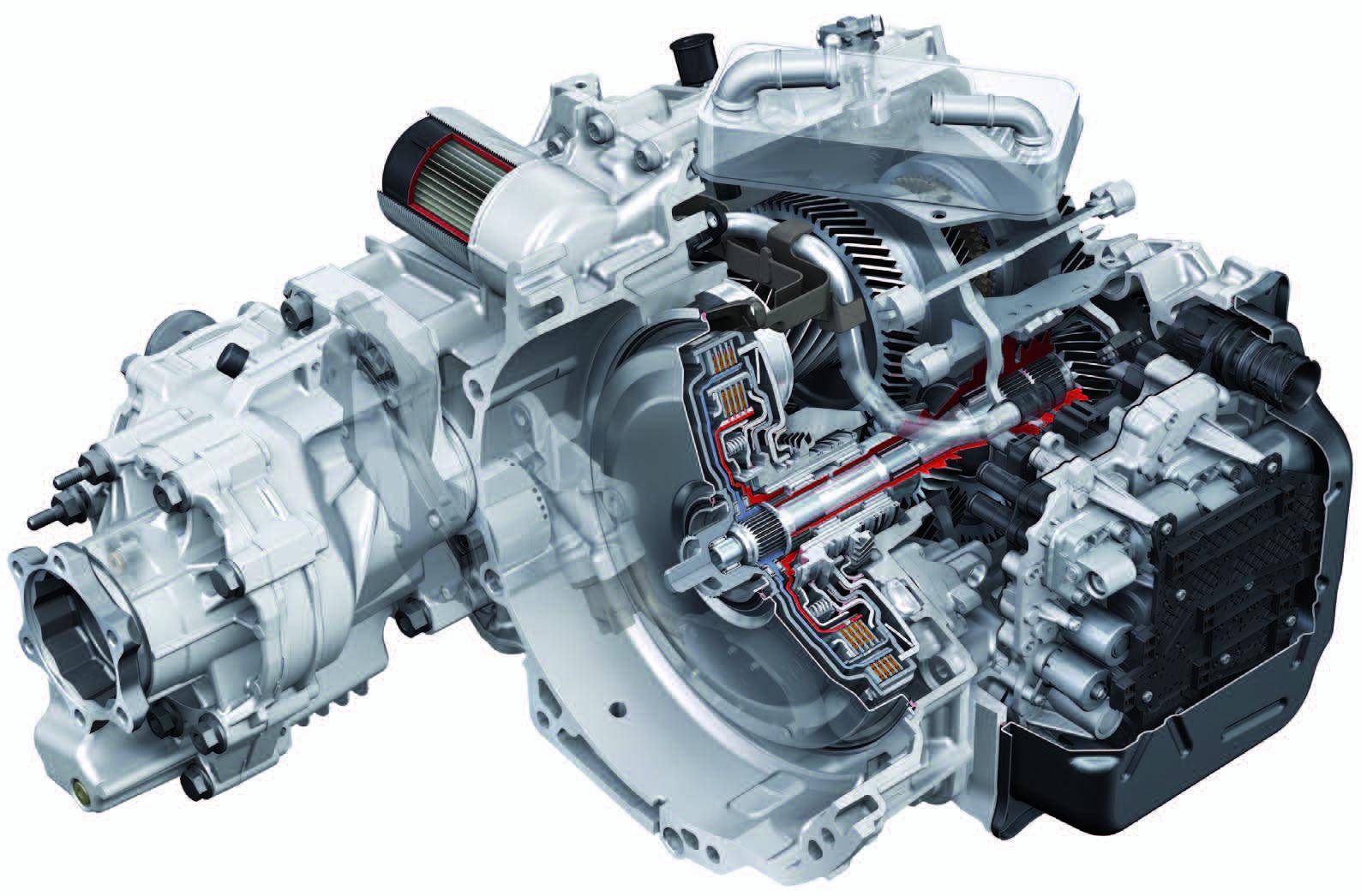 д.
д.
При этом по заверениям самих производителей РКПП должны в скором времени полностью вытеснить «классические» АКПП с гидротрансформатором и вариаторные коробки. Однако на практике этого не произошло.
Дело в том, что в плане комфорта работа «однодисковых» роботизированных коробок (с одним сцеплением) далека от АКПП и, тем более, от бесступенчатого вариатора. Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Также ресурс сцепления на «роботе» и актуаторов достаточно низкий (в среднем, около 80-100 тыс. км.). При этом стоимость актуаторов высокая, а ремонтопригодность данных элементов сомнительная. По этой причине многие сервисы практикуют узловую замену, то есть актуатор просто меняется на новый.
Что касается более сложных и дорогих преселективных коробок с двумя сцеплениями, переключения в этом случае более плавные и больше напоминают работу обычной АКПП. Однако ресурс такого «робота» (например, DSG 6 или DSG 7) все равно снижен, нередко возникают проблемы по части механики и электроники, а ремонт в ряде случаев потребует значительных расходов.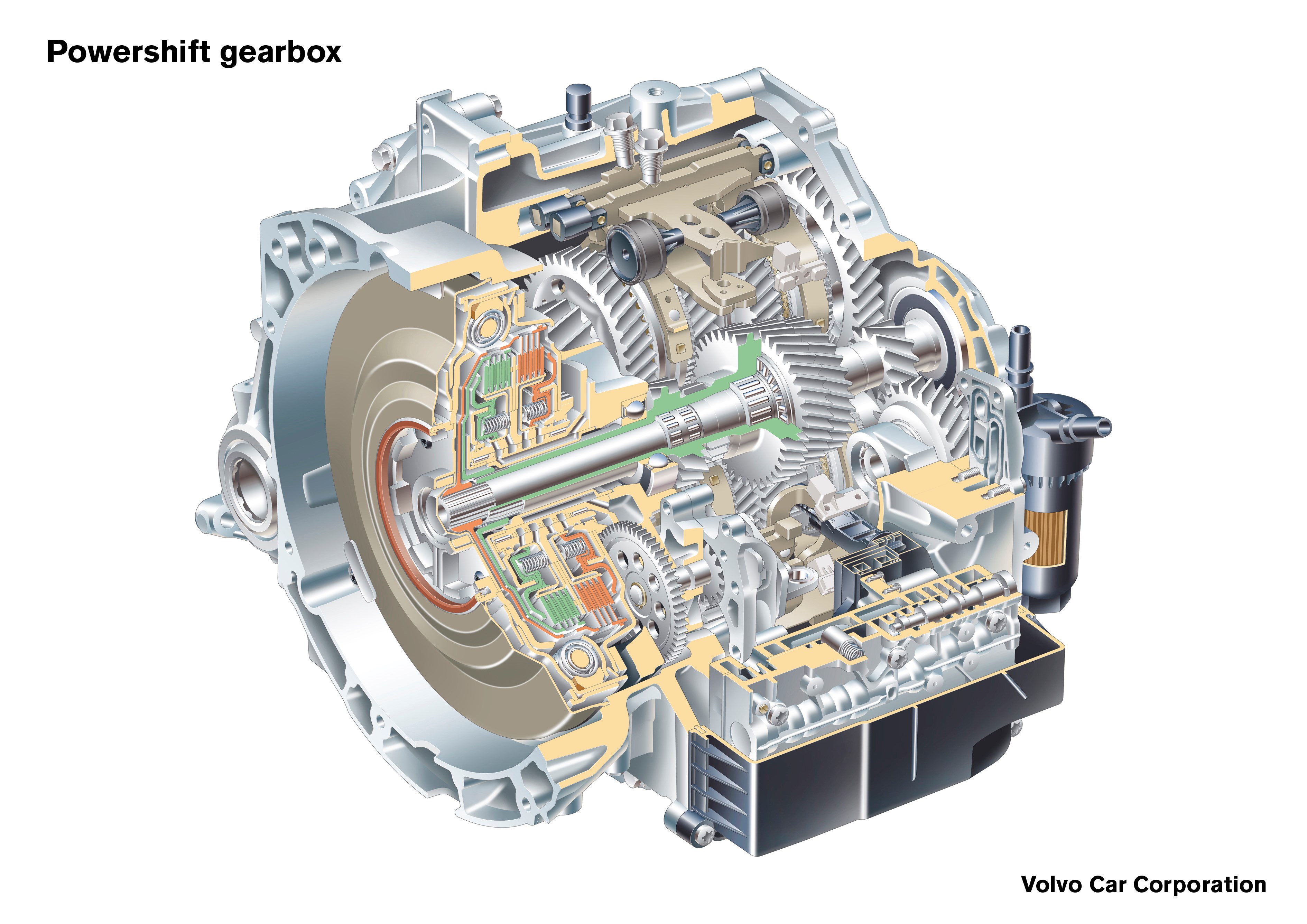
В качестве итога отметим, что многие автопроизводители, особенно из Японии, начали постепенно отказываться от установки коробки-робот на свои модели, заменяя ее классической АКПП с гидротрансформатором (ГДТ).
Например, Hondа Civic 8 хэтчбек, который изначально выпускался с РКПП, но в дальнейшем после рестайлинга получил полноценный «автомат». То же самое можно сказать о популярной Toyota Corolla 2007 года, которая позднее получила вместо «робота» автоматическую гидромеханическую коробку.
Роботизированная коробка передач плюсы и минусы
У этого поста — 2 комментария.
Роботизированная коробка передач может именоваться еще как «автоматизированная» или «коробка-робот». В любом случае это механическая коробка передач, но со встроенными электронными компонентами, за счет которых автоматически выполняются следующие функции управления: переключение передач и выключение сцепления. Роботизированная коробка передач выгодна тем, что в ней успешно сочетаются удобство автоматической коробки передач и экономия расхода топлива, надежность функционирования коробки передач механического типа. К тому же «коробка-робот» стоит намного дешевле по сравнению со стандартной автоматической коробкой переключения передач (АКПП).
Роботизированная коробка передач выгодна тем, что в ней успешно сочетаются удобство автоматической коробки передач и экономия расхода топлива, надежность функционирования коробки передач механического типа. К тому же «коробка-робот» стоит намного дешевле по сравнению со стандартной автоматической коробкой переключения передач (АКПП).
На сегодняшний день практически все лидеры автопроизводства оборудуют выпускаемые ими автомобили роботизированными коробками передач. При этом все произведенные коробки передач отличаются не только по конструкции, но и запатентованным наименованием. Все же, несмотря на вышесказанное можно выделить общее в устройстве данного типа коробок передач: сцепление; привод передач и сцепления, механическая коробка передач; система управления. Роботизированные коробки передач могут быть оснащены гидравлическим или электрическим приводом передач и сцепления. При этом в электрическом приводе функционирующими органами являются электродвигатели (сервомеханизмы).
Роботизированная коробка передач может быть двух видов здесь все зависит от того каким типом привода она оборудована: электропривод — роботизированная коробка передач; гидропривод – секвентальная коробка передач (последовательное переключение передач). Но, несмотря на существующие различия чаще всего оба вида коробок носят определение – роботизированные. Конструктивные элементы, из которых состоит система управления «коробки-робота»: входные датчики – следят на выходе и входе роботизированной коробки передач за частотой вращения, температурой и давлением масла; электронный блок управления – получает сигналы от датчиков и выполняет заложенные в него функции управления; исполнительные механизмы – клапаны регулирования и электромагнитные клапаны. В систему управления роботизированных коробок передач оснащенных гидравлическим приводом входит еще и гидравлический блок, предназначение которого управлять давлением в системе и гидроцилиндрами.
Что касается недостатков «коробки-робота», то это то, что для переключения передач требуется больше времени. По этой же причине не возможно с полным комфортом управлять автомобилем из-за провалов и рывков в динамике авто. Сегодня данную проблему решает роботизированная коробка передач, оснащенная двумя сцеплениями, позволяющая переключать передачи не разрывая поток мощности. Такой агрегат оборудован двумя рядами передач, связанных через отдельное сцепление с маховиком двигателя. Получается, когда автомобиль начинает движение на первой скорости, коробка передач включает и держит наготове вторую скорость, и т.д. Таким образом, процесс переключения передач идет быстро, не разрывая поток мощности.
Другие похожие статьи:
Создание устойчивых к ошибкам роботов с контрольными точками — Automatify
Verfasst фон Алин Скарлат
Когда дело доходит до RPA, гибкость автоматизации повторяющихся задач, связанных с доступом к нескольким приложениям, является отличной функцией, но она также создает некоторые проблемы. Предположим, например, что вы добавляете новую заявку в ServiceNow (или другую систему управления ИТ-услугами), а затем хотите вставить номер заявки в файл отчета. Однако последний шаг терпит неудачу. На этом этапе, если у вас есть механизм повторных попыток, все выполнение будет перезапущено, что означает дублирование созданного билета в ServiceNow. Это, конечно, только базовый пример, но в реальных приложениях влияние может быть намного выше, в нескольких системах, что может повлиять даже на конечных пользователей.![]()
В этом посте мы собираемся предложить подход, основанный на контрольных точках, который позволяет избежать этих ловушек и даже обеспечивает некоторые дополнительные функции производительности и отчетности.
Что такое контрольно-пропускной пункт в RPA?
Возможно, вы знакомы с концепцией контрольных точек из игр, когда после завершения уровня или даже более сложной последовательности уровней ваш игровой прогресс сохраняется автоматически, поэтому вам не нужно повторять ту же часть, если вы потерпите неудачу в поздняя стадия. Точно так же в RPA контрольная точка представляет собой точку в потоке выполнения, в которой известно состояние системы.
В нашем примере с билетами контрольная точка может быть определена сразу после успешного создания билета в ServiceNow. Если последующий шаг завершится ошибкой и сработает механизм повторной попытки, контрольная точка гарантирует, что робот не повторит всю последовательность ServiceNow, что позволит избежать создания дубликатов билетов.
Как реализовать такие контрольно-пропускные пункты?
Сначала рассмотрим структуру КПП, которая может состоять из двух частей:
Ворота : мы определяем это как логическую переменную, которая, как следует из названия, действует как ворота: как только робот завершит определенную часть процесса, он закроет ворота (т.е. установит Gate_NameOfSubprocess переменная в «ложь»). Таким образом, если будет запущена повторная попытка, робот будет знать, что не нужно выполнять этот подпроцесс снова, потому что ворота закрыты.
Данные : относятся к выходным данным подпроцесса, которые будут использоваться в следующих подпроцессах и поэтому должны быть сохранены. Это охватывает любые типы данных, которые вам нужны, от примитивных типов, таких как целые числа или строки, до коллекций, таких как словари или таблицы.
Как показано на диаграмме, когда ворота уже закрыты, робот может продолжить следующую последовательность в потоке, выбирая необходимые переменные из (ранее сохраненных) данных контрольной точки.
Практический пример: оформление билетов в ServiceNow
Давайте проанализируем случай, который мы представили в начале статьи: мы должны прочитать электронное письмо с помощью Outlook, а затем извлечь из него сведения о билете, такие как пользователь, отправивший его, тема или была ли она отмечена как высокоприоритетная или нет. Получив данные, мы хотим создать тикет в ServiceNow, а затем добавить сведения о деле в файл отчета, где ответственные пользователи могут получить обзор активности робота.
Диаграмма процесса будет выглядеть так:
Где мы храним данные контрольных точек?
Что касается технической реализации, то, конечно, это зависит от используемой вами платформы RPA. Как правило, у вас есть два варианта:
В памяти: вы можете просто использовать переменные (наиболее практичным является словарь) для хранения данных для выполнения одного запуска
Сохранение: электронная таблица Excel, хранящаяся на диске C: робота, сетевом диске или в папке SharePoint, позволит вам получить доступ к контрольной точке при нескольких запусках одного и того же процесса.
 Это может помочь вам, например, в случае перезагрузки сервера.
Это может помочь вам, например, в случае перезагрузки сервера.
Пример данных контрольной точки, сохраненных в файле Excel
Дополнительные преимущества использования контрольных точек
Помимо основного преимущества предотвращения несоответствий данных, использование контрольных точек может быть полезным и в других отношениях:
Потоки, которые должны обрабатывать огромное количество транзакций: например, один из ваших серверов приложений перезапускается, и вы хотите продолжить с того места, на котором остановились, после того, как он снова будет подключен к сети.
Когда транзакцию необходимо отменить из-за ошибки: контрольная точка может сообщить вам, какие данные были созданы/изменены, чтобы в случае ошибки блокировки можно было выполнить откат.
Расширенное ведение журнала ошибок: вы можете регистрировать данные транзакций из соответствующих контрольных точек в случае ошибки, помогая вам легко воспроизвести сценарий без необходимости поиска тестовых данных.

Отчетность: контрольная точка обычно содержит наиболее важные данные, которые можно использовать для отправки отчетов ответственному бизнес-пользователю.
Улучшение производительности: наличие нескольких пройденных контрольных точек означает, что выполнение значительно сокращается в случае повторной попытки, поскольку шлюзы закрываются, а соответствующие подпроцессы пропускаются.
Снижение затрат на компоненты ИИ: если в вашем потоке используются услуги AI SaaS, скорее всего, вы используете модель ценообразования с оплатой по факту использования. Контрольная точка сразу после того, как модель ИИ вернет результаты, предотвратит повторную отправку одного и того же запроса.
Контрольные точки — это лишь одна из стратегий, которые мы используем для создания ботов, которые контролируемо и эффективно реагируют на ошибки. Обязательно следите за нашей страницей LinkedIn , чтобы не пропустить новые статьи о том, как мы это делаем.
UiPathAutomation Anywhere Передовой опыт
Алин Скарлат
Городской поисково-спасательный пост
16-311 Лаборатория 7: Городской поисково-спасательный пост| Чтобы доказать, что вы достойны этого, вы должны выполнить 6 из следующих 8 контрольных точек, прежде чем вам будет разрешено перейти к будущим лабораториям. Эти задания предназначены для проверки способности вашего робота двигаться, поворачиваться, использовать камеру и преодолевать различные препятствия. Ни один из них не требует автономии. Они могут все должно быть сделано с помощью пользовательского ввода с компьютера. Если вы хотите сделать их автономный, это ваш выбор. |
| Часть I Задача 1: Ваш робот должен быть в состоянии проехать через кусок картона с
вырезанная секция размером 6 дюймов x 6 дюймов (ширина х высота). |
 Ваш робот может расширяться после этого,
но это должно быть сделано автоматически без помощи пользователя.
Ваш робот может расширяться после этого,
но это должно быть сделано автоматически без помощи пользователя. | Часть II Затем ваш робот должен выполнить 4 из следующих 6 задач во время дневных или вечерних лабораторных часов. Задания должны выполняться последовательно и без изменений. робота можно выполнять между задачами. Выбор заданий будет за вами. Однако, если вы не можете выполнить все из них, вы можете быть в серьезном невыгодном положении для будущих лабораторий. Каждое задание будет оцениваться по принципу «сдал/не сдал». У вас есть неограниченное количество попыток, но если вы потерпите неудачу 3 раз подряд вам, вероятно, следует переосмыслить свой дизайн. Из-за ограничений по времени, наложенных на проект, вы не получите оценку за контрольные точки, если они не будут выполнены во время лабораторных часов. Задача 2: Небольшой коридор будет построен для проверки способности вашего автомобиля проходить повороты. робот. Все, что вам нужно сделать, это добраться до другой стороны. Макет и актуальность размеры будут такими же, как на следующем рисунке. Задача 3:Камера будет прикреплена к вашему роботу и помещена в мир низкой освещенности. Вы должны найти и прикоснуться к назначенной цели, используя дистанционное управление. Задача 4: Наклон будет доступен. Будет не более 30 градусов. Передняя часть вашего робота должна проходить от основания склона вверх не менее чем на 15 дюймов. Набор лестниц будет доступен. Каждый шаг будет не более 1,5″ высокий. Ваш робот должен подняться по ступенькам, развернуться и спуститься по лестнице. Задача 6: Робот должен пересечь поле из щебня. Щебень состоит статических (неподвижных) и незакрепленных предметов. Все, что вам нужно сделать, это перейти от начала к местоположение цели. Задача 7:Робот должен подняться по склону, а затем преодолеть ряд неровностей, не упав с контрольной точки. |
 (или оговариваются заранее). Если вы не проводите демонстрацию во время лабораторных занятий, вы все равно должны выполнить
необходимые контрольные точки, прежде чем вам будет разрешено выполнить Задание 8. Потребуется принять особые меры.
(или оговариваются заранее). Если вы не проводите демонстрацию во время лабораторных занятий, вы все равно должны выполнить
необходимые контрольные точки, прежде чем вам будет разрешено выполнить Задание 8. Потребуется принять особые меры.
| Задание 8: (Необходимо выполнить части I и II) Вам будут доступны остатки прошлогоднего Карнеги-Меллона. У вас будет 10 минут, чтобы войти снаружи здания и добраться до второго этажа. Наверх
|
