Схемы обмоток фазных роторов | Обмотчик электрических машин
Страница 35 из 84
ГЛАВА VIII
СТЕРЖНЕВЫЕ ОБМОТКИ РОТОРОВ АСИНХРОННЫХ ДВИГАТЕЛЕМ
§ 35. СХЕМЫ ОБМОТОК ФАЗНЫХ РОТОРОВ
Обмотки фазных роторов асинхронных двигателей мощностью более 70—80 кВт, как правило, выполняют стержневыми.
В фазных роторах современных асинхронных двигателей почти всегда применяют двухслойные волновые обмотки, так как в двухслойных обмотках лобовые части изгибаются меньше, чем в однослойных, а в волновых обмотках меньше межгрупповых соединений, чем в петлевых той же полюсности.
Закономерность соединения схемы стержневых волновых обмоток рассмотрим на конкретном примере. Составим схему волновой стержневой обмотки трехфазного ротора с Z2= 24 и 2р= 4. На рис. 101, а показаны 24 пары линии пазов, в которых располагаются стержни верхнего (сплошные линии) и нижнего (пунктирные линии) слоев обмотки. Разметим пазы так же, как в схемах двухслойных обмоток статора, т.
Z2/(2p) = 24/4 = 6 пазовых делений.
Рис. 101. Построение схемы стержневой волновой обмотки фазного ротора:
а —распределение пазов по фазам, б — соединение стержней первой половины фазы, в — последовательность соединения стержней
Число пазов на полюс и фазу q2 = Z2/2pm = 24/(4-3) = 2. Для всех стержней фазы А отметим стрелками направление мгновенных значений токов. Оно меняется при переходе от одного полюсного деления к другому. Построение схемы обмотки начнем, приняв за начало фазы А верхний стержень, лежащий в первом пазу (рис. 101,6). Одновременно с вычерчиванием схемы обмотки будем заполнять таблицу соединений с указанием номеров пазов и последовательности шагов, как показано на рис. 101, в. Обмотку выполняют с диаметральным шагом (для нашей схемы у=τ2=6 пазовым делением).
Первый обход обмотки по всей окружности ротора завершается укороченным (или удлиненным) шагом, после чего соединение продолжают в той же последовательности с диаметральными шагами, изменяя их в конце каждого из обходов.

 Схема соединения фазы А изображена на рис. 102, а всех фаз обмотки ротора — на рис. 103. По схеме рис. 103 можно проследить основные закономерности, характерные для стержневых волновых обмоток роторов. Начала фаз располагаются в 1, 9 и 17-м пазах, т. е. через 2q2p = 2x2x2 = 8 зубцовых делений. Такое расстояние между началами фаз обеспечивает и электрическую и геометрическую симметрии обмотки.
Схема соединения фазы А изображена на рис. 102, а всех фаз обмотки ротора — на рис. 103. По схеме рис. 103 можно проследить основные закономерности, характерные для стержневых волновых обмоток роторов. Начала фаз располагаются в 1, 9 и 17-м пазах, т. е. через 2q2p = 2x2x2 = 8 зубцовых делений. Такое расстояние между началами фаз обеспечивает и электрическую и геометрическую симметрии обмотки.
Рис. 102. Схема соединения стержней одной фазы волновой обмотки ротора (а) и последовательность их соединения (б)
Электрический угол между началами фаз кратен 120° (он равен 2р-60° = 2х2х60 = 240 эл. град), а геометрический угол равен 120°, т. е. начала фаз расположены симметрично по окружности ротора.
 Так, например, в каждой фазе петлевой обмотки с 2р = 12 будет по 11 перемычек между катушечными группами, а в фазе стержневой волновой — только одна.
Так, например, в каждой фазе петлевой обмотки с 2р = 12 будет по 11 перемычек между катушечными группами, а в фазе стержневой волновой — только одна.При симметрично выбранных началах фаз обмотки также симметрично по окружности ротора располагаются концы фаз (Р4 — в 7-м, Р5 — в 15-м, Р6 — в 23-м пазах) и перемычки между катушечными группами, что облегчает балансировку ротора после укладки обмотки. В большинстве случаев обмотка ротора соединяется в звезду. Начала фаз обмотки ротора ( Р1, Р2, Р3) соединяются с контактными кольцами, а концы фаз (Р4, Р5, Р6) — между собой кольцевой перемычкой.
Рис. 103. Схема стержневой волновой обмотки ротора с укороченными переходами с Z= 24, 2р=4
Как мы уже знаем, обмотка может быть выполнена и с удлиненными шагами в конце каждого обхода. Ее схема строится так же, как и схема на рис. 103, но в конце обхода выполняется удлиненный шаг, равный (у+1). Из-за увеличения шага несколько удлиняются лобовые части стержней, соединенных с перемычками, а у выводных стержней возникают дополнительные перекрещивания в лобовых частях.
Иногда стержневую волновую обмотку ротора делают с различными переходными шагами: при обходе первой ветви до перемычки с удлиненными, а после перемычки — с укороченными.
Встречаются также схемы обмоток фазных роторов, выполненные без перемычек (рис. 104). В таких обмотках на месте последнего при прямом обходе стержня, который в обычных схемах соединяется с перемычкой, устанавливают изогнутый переходный стержень (паз 26 на рис. 104). Половина этого стержня 1 (рис. 105) располагается в нижней, а другая половина — в верхней части паза. Обе лобовые части переходного стержня отгибаются в одну и ту же сторону, и направление обхода соединения обмоток после переходного стержня меняется на обратное, так же как и после перемычки. В таких схемах выводные концы последних стержней всех фаз располагаются на противоположной от начал фаз стороне ротора.
Стержневую волновую обмотку делают с одной или реже с двумя параллельными ветвями. Выполнение большего числа параллельных ветвей из-за дополнительных соединений в лобовых частях технологически трудно и в практике применяется редко. Для получения двух параллельных ветвей перемычку между половинами фаз убирают и каждую половину обмотки соединяют с начальными и конечными выводами фаз (рис. 106).
Рис. 105. Переходной стержень в пазу ротора
Рис. 106. Соединение фаз обмотки ротора в две параллельные ветви
Чтобы начала фаз в обмотке ротора располагались по окружности ротора симметрично, между ними должно заключаться  Такое симметричное расположение возможно во всех роторах, число полюсов которых не кратно трем. В двигателях с числом, кратным трем (2р=6, 12 и т. д.), симметричное положение выводов приходится нарушать, так как через 2q2p пазов в них располагаются стержни одной и той же фазы. Начала фаз в обмотках роторов таких машин выбирают через 2q2(p — 1) пазовых делений.
Такое симметричное расположение возможно во всех роторах, число полюсов которых не кратно трем. В двигателях с числом, кратным трем (2р=6, 12 и т. д.), симметричное положение выводов приходится нарушать, так как через 2q2p пазов в них располагаются стержни одной и той же фазы. Начала фаз в обмотках роторов таких машин выбирают через 2q2(p — 1) пазовых делений.
- Назад
- Вперёд
схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
Недостатки:
Преимущества фазного:
Недостатки:
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
Тем не менее, у асинхроников есть недостатки. А именно:
А именно:
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
Как избежать снижения КПД?
Для этого используются:
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности. У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Вам может быть интересно
Электродвигатель асинхронный А4-400Х-10У3
Электродвигатель асинхронный 2АОД-500/250-10/12 У1
Электродвигатель асинхронный ДАЗО4-400У-10
Электродвигатель взрывозащищенный ВАО7-450 M-6
Эквивалентная схема асинхронного двигателя — цепь ротора и статора
Эквивалентная схема асинхронного двигателя обеспечивает рабочие характеристики, которые оцениваются для установившихся условий. Асинхронный двигатель основан на принципе индукции напряжений и токов. Напряжение и ток индуцируются в цепи ротора из цепи статора для работы. Эквивалентная схема асинхронного двигателя аналогична схеме трансформатора.
Содержимое:
- Модель цепи статора
- Модель цепи ротора
- Примерная эквивалентная схема асинхронного двигателя
Модель цепи статора
Модель цепи статора асинхронного двигателя состоит из сопротивления обмотки фазы статора R 1 , реактивного сопротивления рассеяния обмотки фазы статора X 1 , как показано на схеме ниже:
Отсутствие нагрузки ток I 0 моделируется чисто индуктивным реактором X 0 с компонентом намагничивания I µ и неиндуктивным резистором R 0 , пропускающим ток потерь в сердечнике I ω . Таким образом,
Таким образом,
Полный ток намагничивания I 0 значительно больше в случае асинхронного двигателя по сравнению с трансформатором. Это происходит из-за более высокого сопротивления, вызванного воздушным зазором асинхронного двигателя. Как известно, в трансформаторе ток холостого хода изменяется от 2 до 5% номинального тока, тогда как в асинхронном двигателе ток холостого хода составляет около от 25 до 40 % номинального тока в зависимости от типоразмера двигателя. Величина реактивного сопротивления намагничивания X 0 также очень мала в асинхронном двигателе.
Модель цепи ротора
Когда на обмотки статора подается трехфазное питание, в обмотках ротора машины индуцируется напряжение. Чем больше будет относительное движение магнитных полей ротора и статора, тем больше будет результирующее напряжение ротора. Наибольшее относительное движение происходит в состоянии покоя. Это состояние также известно как заблокированный ротор или состояние заблокированного ротора. Если индуцированное напряжение ротора в этих условиях равно E 20 , тогда индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже:
Если индуцированное напряжение ротора в этих условиях равно E 20 , тогда индуцированное напряжение при любом скольжении определяется уравнением, показанным ниже:
Сопротивление ротора постоянно и не зависит от скольжения. Реактивное сопротивление асинхронного двигателя зависит от индуктивности ротора и частоты напряжения и тока в роторе.
Если L 2 — индуктивность ротора, реактивное сопротивление ротора определяется уравнением, показанным ниже:
Но, как мы знаем,
Следовательно,
Где X 20 — реактивное сопротивление ротора в состоянии покоя.
Цепь ротора показана ниже:
Полное сопротивление ротора определяется уравнением ниже:
Ток ротора на фазу определяется уравнением, показанным ниже:
Здесь I 2 — частота скольжения ток, создаваемый индуцированным напряжением частоты скольжения sE 20 , действующим в цепи ротора, имеющей импеданс на фазу (R 2 + jsX 20 ).
Теперь, разделив уравнение (5) на скольжение s, получим следующее уравнение:
R 2 – постоянное сопротивление и переменное реактивное сопротивление рассеяния sX 20 . Точно так же схема ротора, показанная ниже, имеет постоянное реактивное сопротивление рассеяния X 20 и переменное сопротивление R 2 Ом/с.
Уравнение (6) выше объясняет вторичную цепь воображаемого трансформатора с постоянным коэффициентом напряжения и с одинаковой частотой обеих сторон. Этот воображаемый неподвижный ротор несет тот же ток, что и реальный вращающийся ротор. Это позволяет передавать импеданс вторичного ротора на сторону первичного статора.
Эквивалентная схема дополнительно упрощается за счет смещения ветвей шунтирующего импеданса R 0 и X 0 на входные клеммы, как показано на схеме ниже:
Примерная схема основана на предположении, что V 1 = Е 1 = Е’ 2 . В приведенной выше схеме единственным компонентом, зависящим от скольжения, является сопротивление. Все остальные величины постоянны. Следующие уравнения могут быть записаны при любом заданном проскальзывании s следующим образом:
В приведенной выше схеме единственным компонентом, зависящим от скольжения, является сопротивление. Все остальные величины постоянны. Следующие уравнения могут быть записаны при любом заданном проскальзывании s следующим образом:
Полное сопротивление за пределами AA’ определяется как:
Подставляя значение ZAA’ из уравнения (7) в уравнение (8), мы получаем,
Следовательно,
Ток холостого хода I 0 равен
Полный ток статора определяется уравнением, показанным ниже:
Общие потери в сердечнике определяются уравнением, показанным ниже:
Мощность воздушного зазора на фазу определяется как: Развиваемый крутящий момент определяется уравнением, показанным ниже:
приведенное выше уравнение представляет собой уравнение крутящего момента асинхронного двигателя. Приблизительная модель эквивалентной схемы является стандартом для всех расчетов производительности асинхронного двигателя.
Сопротивление прерывателя в цепи ротора
Управление скоростью посредством изменения скольжения может быть достигнуто путем использования сопротивления прерывателя с переменным сопротивлением в цепи ротора. Из уравнений видно, что максимальное значение крутящего момента не зависит от величины сопротивления ротора. Однако сопротивление ротора влияет на скольжение, при котором возникает максимальный крутящий момент. На рис. 4.9 изображено семейство кривых для переменного сопротивления в цепи ротора. Понятно, что для заданных условий нагрузки скорость может варьироваться. Скольжение двигателя при любом заданном значении сопротивления ротора определяется как
Из уравнений видно, что максимальное значение крутящего момента не зависит от величины сопротивления ротора. Однако сопротивление ротора влияет на скольжение, при котором возникает максимальный крутящий момент. На рис. 4.9 изображено семейство кривых для переменного сопротивления в цепи ротора. Понятно, что для заданных условий нагрузки скорость может варьироваться. Скольжение двигателя при любом заданном значении сопротивления ротора определяется как
, где R′ 2 — сопротивление ротора, а R′ ex — включенное сопротивление.
Внешнее сопротивление можно очень удобно добавлять к фазам ротора с контактными кольцами. Традиционные способы изменения сопротивления с помощью механических контакторов показаны на рис. 4.10. С развитием тиристоров стало возможным использовать сопротивление прерывателя в цепи ротора. Принципиальная схема показана на рис. 4.11.
Обсуждалось, что сопротивление, подключенное к выходным клеммам прерывателя, может изменяться от 0 до R путем изменения временного коэффициента прерывателя. Когда прерыватель всегда выключен, питание всегда подключено к сопротивлению R. В этом случае соотношение времени равно и подключенное эффективное сопротивление равно R. Точно так же, когда прерыватель всегда включен, сопротивление замыкается накоротко. Отношение времени в этом случае равно единице, а эффективное подключенное сопротивление равно 0. Следовательно, изменяя отношение времени от 0 до 1, значение сопротивления можно изменять от R до 0. Параметр Рис. 4.9может быть соотношением времени вместо сопротивления.
Когда прерыватель всегда выключен, питание всегда подключено к сопротивлению R. В этом случае соотношение времени равно и подключенное эффективное сопротивление равно R. Точно так же, когда прерыватель всегда включен, сопротивление замыкается накоротко. Отношение времени в этом случае равно единице, а эффективное подключенное сопротивление равно 0. Следовательно, изменяя отношение времени от 0 до 1, значение сопротивления можно изменять от R до 0. Параметр Рис. 4.9может быть соотношением времени вместо сопротивления.
Мощность скольжения ротора выпрямляется диодным выпрямителем и подается на управляемое сопротивление прерывателя (рис. 4.11). Кривые крутящий момент-скорость могут быть построены для различных соотношений времени. Для коэффициента времени, равного 1, мы получаем нормальную характеристику двигателя. Для коэффициента времени, равного 0, характеристика соответствует характеристике с полным сопротивлением в цепи ротора. Сглаживающая индуктивность L используется в цепи для поддержания постоянного значения тока.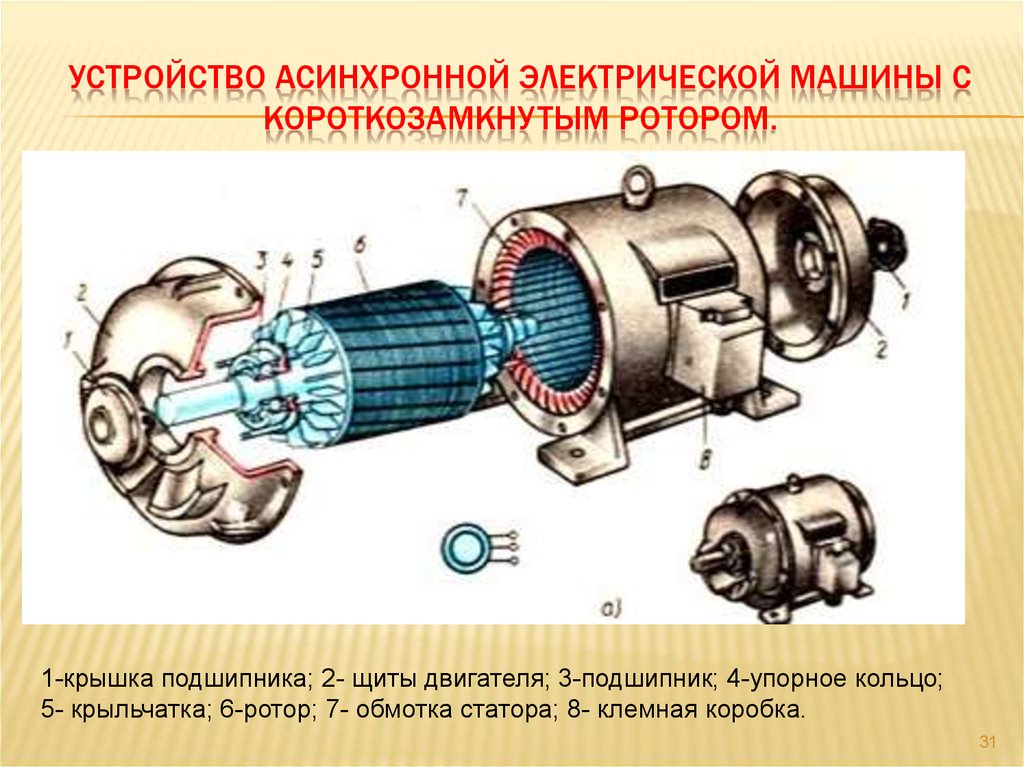 Любое короткое замыкание в сопротивлении прерывателя не вступает в силу из-за L.
Любое короткое замыкание в сопротивлении прерывателя не вступает в силу из-за L.
Значение It, подключенного к сопротивлению прерывателя, действует для всех фаз, и его значение может быть связано с сопротивлением, которое должно быть подключено к каждой фазе, если использовался традиционный метод. Таким образом, если R ex является сопротивлением на фазу, мы имеем
. 4.7 имеем
Когда значение R ex определено в зависимости от требуемого диапазона скорости вплоть до нулевой скорости, значение R ex и R можно определить на основе требуемого крутящего момента в состоянии покоя.
Номинал тиристора прерывателя определяет максимальный ток ротора двигателя. Диапазон регулирования скорости ограничен сопротивлением. Метод очень неэффективен из-за потерь в сопротивлении. Он подходит для непостоянных нагрузок, таких как лифты. В частности, на низких скоростях двигатель имеет очень низкий КПД. Из-за повышенного сопротивления ротора коэффициент мощности лучше.